Верстатний пристрій переміщення
Номер патенту: 78570
Опубліковано: 10.04.2007
Автори: Карпусь Владислав Євгенович, Гаврилюк Юрій Романович, Чернявська Світлана Миколаївна, Бочаров Віталій Борисович
Формула / Реферат
Верстатний пристрій переміщення, що складається з рухомої та нерухомої плит, який відрізняється тим, що пристрій містить два симетричні механізми переміщення "зубчасте колесо-рейка", в кожному з яких зубчасте колесо прикріплене до однієї з плит, а рейка - до іншої, бокові напрямні планки для плит з повздовжніми пазами та болти фіксації плит, встановлені в пазах, для закріплення рухомої плити в новому положенні після переналагодження.
Текст
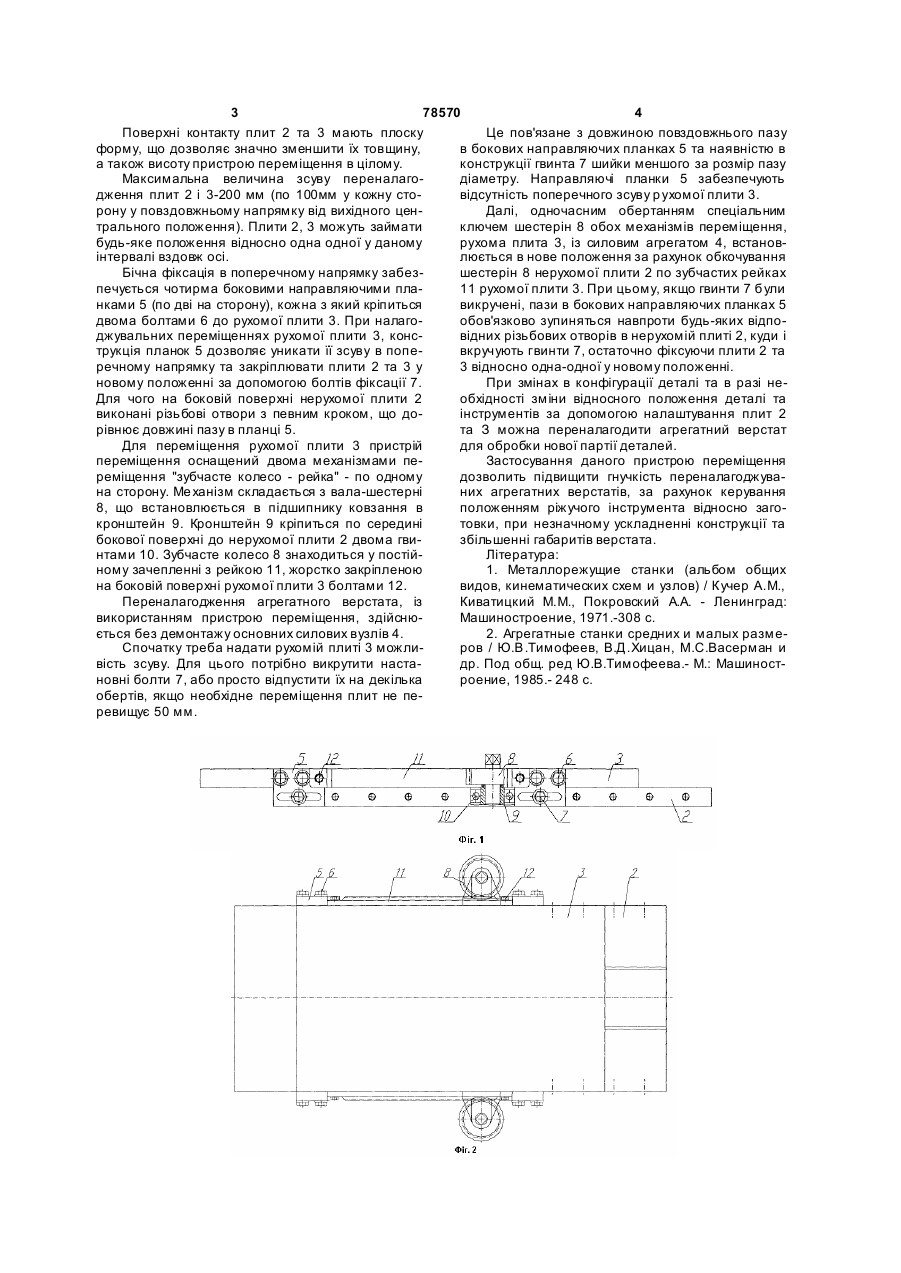
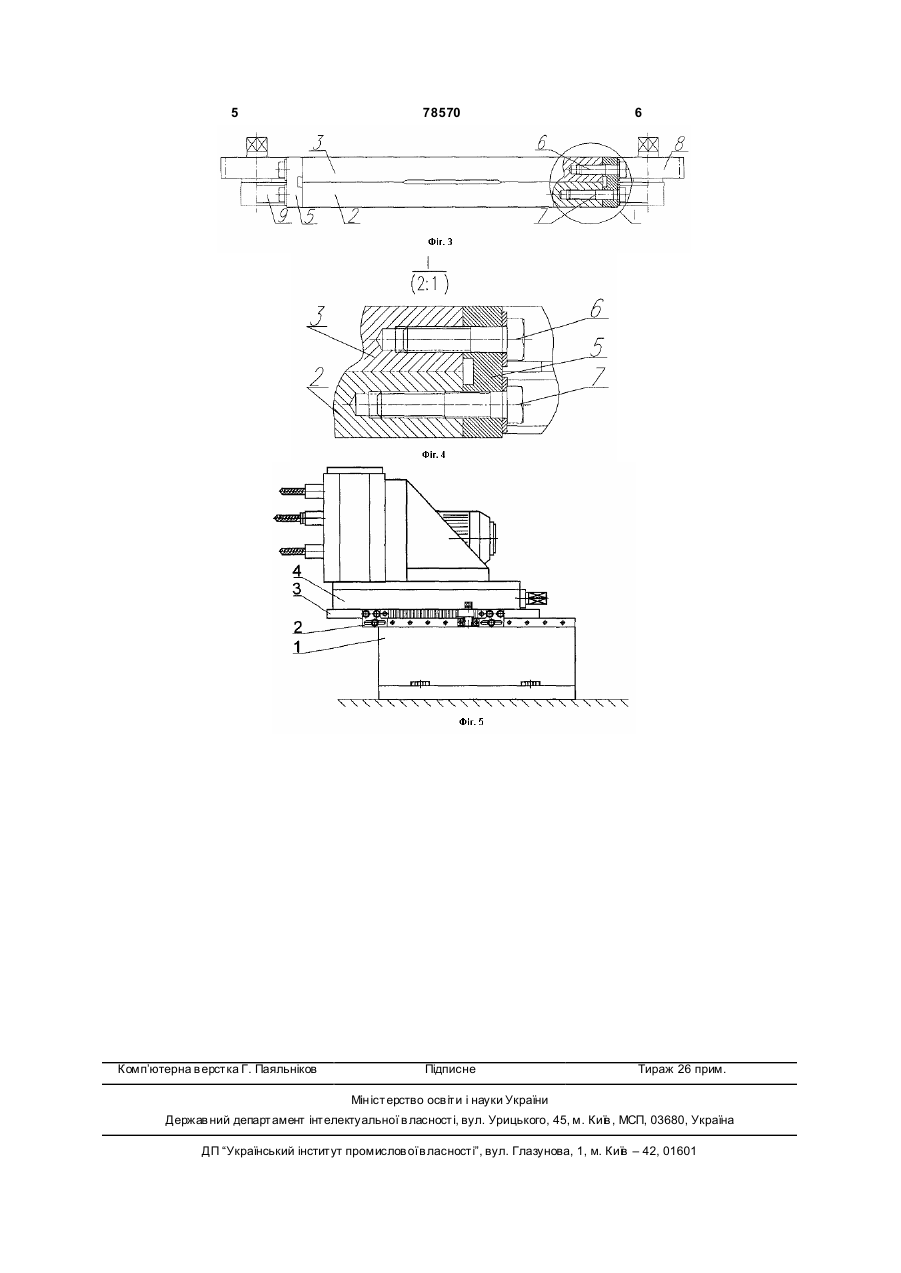
Верстатний пристрій переміщення, що складається з рухомої та нерухомої плит, який відрізняється тим, що пристрій містить два симетричні механізми переміщення "зубчасте колесо-рейка", в кожному з яких зубчасте колесо прикріплене до однієї з плит, а рейка - до іншої, бокові напрямні планки для плит з повздовжніми пазами та болти фіксації плит, встановлені в пазах, для закріплення рухомої плити в новому положенні після переналагодження. (19) (21) 20041210490 (22) 20.12.2004 (24) 10.04.2007 (46) 10.04.2007, Бюл. № 4, 2007 р. (72) Карпусь Владислав Євгенович, Гаврилюк Юрій Романович, Бочаров Віталій Борисович, Чернявська Світлана Миколаївна (73) НАЦІОН АЛЬНИЙ ТЕХНІЧНИЙ УНІВЕРСИТЕТ "ХАРКІВСЬКИЙ ПОЛІТЕХНІЧНИЙ ІНСТИТУТ " (56) EP 1312441 A1, 21.05.2003 UA 3998 U, 15.12.2004 UA 57239 A, 16.06.2003 SU 23145, 30.09.1929 3 78570 4 Поверхні контакту плит 2 та 3 мають плоску Це пов'язане з довжиною повздовжнього пазу форму, що дозволяє значно зменшити їх товщину, в бокових направляючих планках 5 та наявністю в а також висоту пристрою переміщення в цілому. конструкції гвинта 7 шийки меншого за розмір пазу Максимальна величина зсуву переналагодіаметру. Направляючі планки 5 забезпечують дження плит 2 і 3-200 мм (по 100мм у кожну стовідсутність поперечного зсуву р ухомої плити 3. рону у повздовжньому напрямку від вихідного ценДалі, одночасним обертанням спеціальним трального положення). Плити 2, 3 можуть займати ключем шестерін 8 обох механізмів переміщення, будь-яке положення відносно одна одної у даному рухома плита 3, із силовим агрегатом 4, встановінтервалі вздовж осі. люється в нове положення за рахунок обкочування Бічна фіксація в поперечному напрямку забезшестерін 8 нерухомої плити 2 по зубчастих рейках печується чотирма боковими направляючими пла11 рухомої плити 3. При цьому, якщо гвинти 7 були нками 5 (по дві на сторону), кожна з який кріпиться викручені, пази в бокових направляючих планках 5 двома болтами 6 до рухомої плити 3. При налагообов'язково зупиняться навпроти будь-яких відподжувальних переміщеннях рухомої плити 3, консвідних різьбових отворів в нерухомій плиті 2, куди і трукція планок 5 дозволяє уникати її зсуву в попевкручують гвинти 7, остаточно фіксуючи плити 2 та речному напрямку та закріплювати плити 2 та 3 у 3 відносно одна-одної у новому положенні. новому положенні за допомогою болтів фіксації 7. При змінах в конфігурації деталі та в разі неДля чого на боковій поверхні нерухомої плити 2 обхідності зміни відносного положення деталі та виконані різьбові отвори з певним кроком, що доінструментів за допомогою налаштування плит 2 рівнює довжині пазу в планці 5. та З можна переналагодити агрегатний верстат Для переміщення рухомої плити 3 пристрій для обробки нової партії деталей. переміщення оснащений двома механізмами пеЗастосування даного пристрою переміщення реміщення "зубчасте колесо - рейка" - по одному дозволить підвищити гнучкість переналагоджувана сторону. Ме ханізм складається з вала-шестерні них агрегатних верстатів, за рахунок керування 8, що встановлюється в підшипнику ковзання в положенням ріжучого інструмента відносно загокронштейн 9. Кронштейн 9 кріпиться по середині товки, при незначному ускладненні конструкції та бокової поверхні до нерухомої плити 2 двома гвизбільшенні габаритів верстата. нтами 10. Зубчасте колесо 8 знаходиться у постійЛітература: ному зачепленні з рейкою 11, жорстко закріпленою 1. Металлорежущие станки (альбом общих на боковій поверхні рухомої плити 3 болтами 12. видов, кинематических схем и узлов) / Кучер A.M., Переналагодження агрегатного верстата, із Киватицкий М.М., Покровский А.А. - Ленинград: використанням пристрою переміщення, здійснюМашиностроение, 1971.-308 с. ється без демонтажу основних силових вузлів 4. 2. Агрегатные станки средних и малых размеСпочатку треба надати рухомій плиті 3 можлиров / Ю.В.Тимофеев, В.Д.Хицан, М.С.Васерман и вість зсуву. Для цього потрібно викрутити настадр. Под общ. ред Ю.В.Тимофеева.- М.: Машиностновні болти 7, або просто відпустити їх на декілька роение, 1985.- 248 с. обертів, якщо необхідне переміщення плит не перевищує 50 мм. 5 Комп’ютерна в ерстка Г. Паяльніков 78570 6 Підписне Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMachine-tool device of displacement
Автори англійськоюKarpus Vladyslav Yevhenovych, Havryliuk Yurii Romanovych, Bocharov Vitalii Borysovych
Назва патенту російськоюСтаночное устройство перемещения
Автори російськоюКарпусь Владислав Евгеньевич, Гаврилюк Юрий Романович, Бочаров Виталий Борисович
МПК / Мітки
МПК: B23Q 37/00
Мітки: пристрій, верстатний, переміщення
Код посилання
<a href="https://ua.patents.su/3-78570-verstatnijj-pristrijj-peremishhennya.html" target="_blank" rel="follow" title="База патентів України">Верстатний пристрій переміщення</a>
Верстатний пристрій
Номер патенту: 13832
Опубліковано: 25.04.1997
Автор: Тарасов Анатолій Григорович
МПК: B23C 3/00
Мітки: пристрій, верстатний
Формула / Реферат:
Верстатний пристрій, що містить стіл силовий поворотний з розміщеним на ньому вузлом повороту заготовки, який відрізняється тим, що кінематичний зв'язок між указаними столом і вузлом повороту заготовки здійснено за допомогою встановлення між ними зубчатих передач.
Пристрій для переміщення фурм конвертера
Номер патенту: 16799
Опубліковано: 15.08.2006
Автори: Калайтан Максім Васильович, Ларіонов Олександр Олексійович, Семенюк Павло Петрович, Волков Олександр Митрофанович, Климанчук Владислав Владиславович, Чвильов Анатолій Андрійович
МПК: C21C 5/46
Мітки: переміщення, пристрій, фурм, конвертера
Формула / Реферат:
1. Пристрій для переміщення фурм конвертера, що включає гнучкі рукава, які з'єднують жорстко зафіксовані живильні магістралі з фурмами, який відрізняється тим, що він додатково обладнаний механізмом переміщення гнучких рукавів, виконаним у вигляді жорстко закріпленої на горизонтальній робочій площадці рами, розташованої нижче площини з'єднання гнучких рукавів з живильними магістралями, на якій установлено не менш двох пневматичних циліндрів...
Пристрій для переміщення матеріалу
Номер патенту: 50374
Опубліковано: 15.06.2005
Автор: Новіков Анатолій Анатолійович
МПК: D05C 9/00, D05B 21/00
Мітки: матеріалу, пристрій, переміщення
Формула / Реферат:
1. Пристрій для регулювання і перевірки блока опромінювачів дзеркальної антени станції радіотехнічного контролю, що складається з генератора ВЧ сигналів, вихід якого підключений до входу допоміжної антени, блока опромінювачів, що перевіряється, установленого на поворотному . пристрої, еталонної антени, підключеної до аналізатора спектра частоти, вимірювача комплексних коефіцієнтів передач, який відрізняється тим, що в пристрій додатково...
Пристрій для переміщення вантажів
Номер патенту: 16730
Опубліковано: 15.08.2006
Автори: Бут Сергій Анатолійович, Рєзнік Вячеслав Григорович, Соколенко Анатолій Іванович, Васильківський Костянтин Вікторович, Шевченко Олександр Юхимович, Піддубний Володимир Антонович
МПК: B65B 5/10
Мітки: пристрій, вантажів, переміщення
Формула / Реферат:
Пристрій для переміщення вантажів, що містить пневмоциліндр зі штоком і штовхачем, який відрізняється тим, що шток виконаний у вигляді підпружиненого телескопічного з'єднання зовнішньої і внутрішньої труб з шарнірно змонтованим на зовнішній трубі фіксатором-собачкою і нанесеними зубцями-засічками на внутрішній трубі, також містить упор-розфіксатор, змонтований на торцевій поверхні пневмоциліндра.
Пристрій для піднімання та переміщення вантажів
Номер патенту: 15841
Опубліковано: 17.07.2006
Автори: Шевченко Олександр Юхимович, Піддубний Володимир Антонович, Резнік Вячеслав Григорович, Бут Сергій Анатолійович, Соколенко Анатолій Іванович
МПК: B65B 5/10
Мітки: піднімання, вантажів, переміщення, пристрій
Формула / Реферат:
1. Пристрій для піднімання та переміщення вантажів, що складається з механізмів вертикального і горизонтального переміщення, який відрізняється тим, що кінцевий елемент підвіски механізму вертикального переміщення виконано у вигляді ролика, що утворює вищу кінематичну пару з двома симетричними коромислами, встановленими на спільному каркасі зі змонтованими на них опорними роликами для базування на них підвіски гака.2. Пристрій за п. 1,...
Попередній патент: Спосіб відновлення внутрішньої структури тривимірного об’єкта
Наступний патент: Шихта для виготовлення вогнетривких виробів
Випадковий патент: Шків копровий нерознімний