Пристрій для переміщення матеріалу
Формула / Реферат
1. Пристрій для регулювання і перевірки блока опромінювачів дзеркальної антени станції радіотехнічного контролю, що складається з генератора ВЧ сигналів, вихід якого підключений до входу допоміжної антени, блока опромінювачів, що перевіряється, установленого на поворотному . пристрої, еталонної антени, підключеної до аналізатора спектра частоти, вимірювача комплексних коефіцієнтів передач, який відрізняється тим, що в пристрій додатково введений стенд перевірки блока опромінювачів, що складається з комутаційного вузла для підключення блока опромінювачів, що перевіряється, зовнішніх джерел живлення стенда, аналізатора спектра частоти, вимірювача комплексних коефіцієнтів передач, формувача команд керування, вхід якого підключений до комутаційного вузла, а вихід до входу перетворювача, вихід якого підключений до комутаційного вузла і підсилювача логарифмічного, вхід якого підключений до комутаційного вузла, а вихід до формувача команд керування.
2. Пристрій за п.1, який відрізняється тим, що блок опромінювачів, що перевіряється, і еталонна антена повинні бути встановлені на певній відстані від допоміжної антени і на певній висоті від поверхні землі з метою забезпечення необхідної точності вимірювання параметрів ДН блока опромінювачів, що перевіряється, а еталонна антена повинна бути встановлена на мінімальній відстані від краю блока опромінювачів, що перевіряється, що забезпечує стійкий прийом сигналу допоміжної антени і калібрування вимірювальних приладів.
Текст
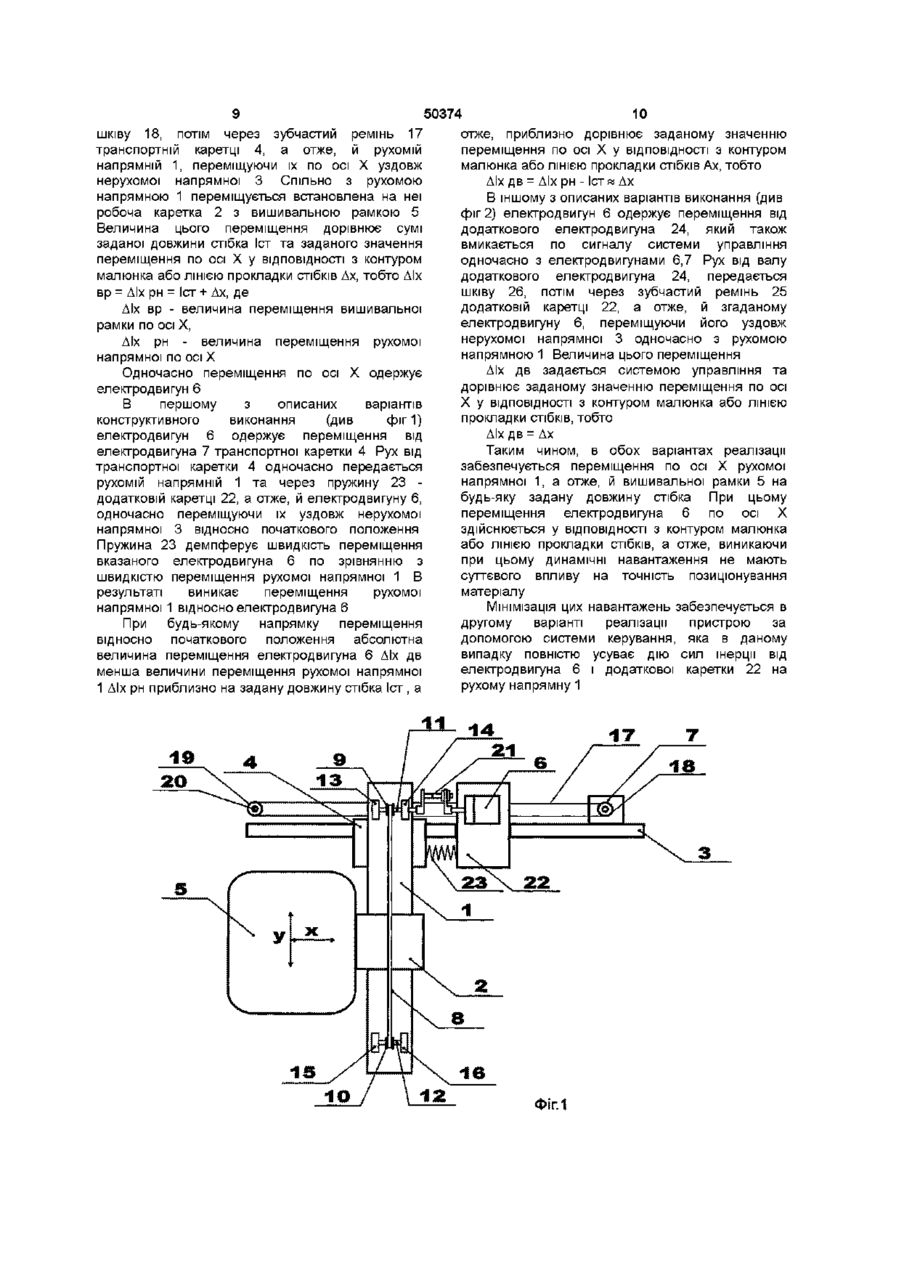
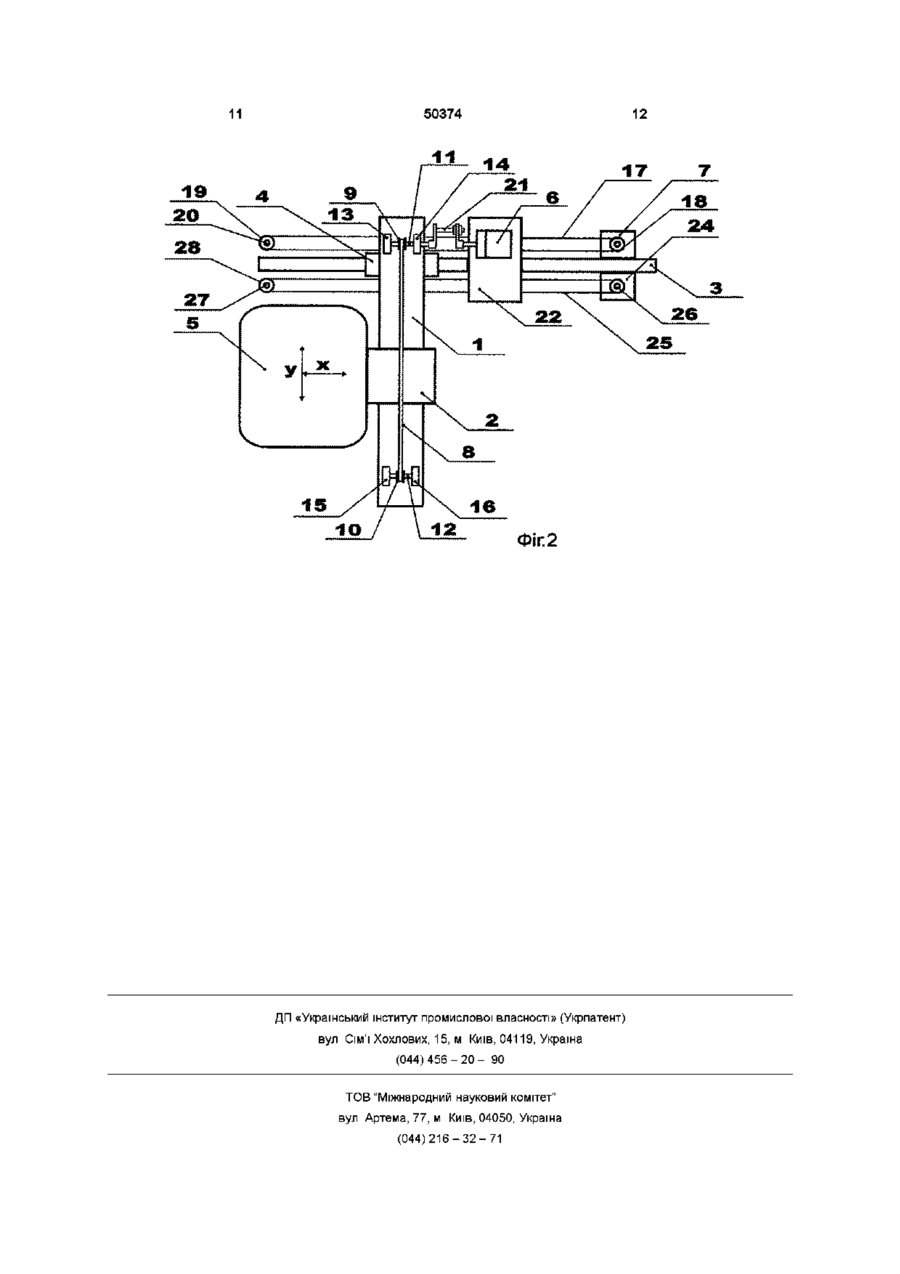
1 Пристрій для переміщення матеріалу, який включає розташовані взаємно перпендикулярно рухому напрямну з робочою кареткою та принаймні одну нерухому напрямну з транспортною кареткою, вишивальну рамку, що жорстко з'єднана з робочою кареткою, та керовані електроприводи кареток з механізмами переміщення та електродвигунами, при цьому рухома напрямна встановлена з можливістю переміщення вздовж нерухомої напрямної та відносно електродвигуна робочої каретки, який відрізняється тим, що електродвигун робочої каретки встановлений з можливістю переміщення паралельно нерухомій напрямній та з'єднаний з керованим електроприводом, а абсолютна величина переміщення рухомої напрямної відносно електродвигуна робочої каретки обрана більшою за задану довжину стібка 2 Пристрій за п 1 , який відрізняється тим, що електродвигун робочої каретки закріплений на додатковій каретці, яка встановлена на нерухомій напрямній 3 Пристрій за пп 1, 2, який відрізняється тим, що електродвигун робочої каретки з'єднаний з керованим електроприводом транспортної каретки за допомогою амортизатора 4 Пристрій за пп 1, 2, який відрізняється тим, що електродвигун робочої каретки з'єднаний з додатковим керованим електроприводом Винахід відноситься до області швейного машинобудування та може бути використаний для переміщення матеріалу у вишивальних автоматах та напівавтоматах, а також у вишивальних приставках швейних машин Основною метою створення нових пристроїв для переміщення матеріалу є підвищення продуктивності вишивальних машин при збереженні їх потужності та ЯКОСТІ ВИШИВКИ Зазначена мета не може бути досягнута шляхом підвищення швидкості переміщення матеріалу без удосконалення конструкції відомих пристроїв, тому що при цьому різко зростають динамічні навантаження, які виникають при зворотнопоступальному русі вишивальної рамки в стартстопному режимі роботи, в наслідок чого збільшуються сили інерції у елементах конструкції та рівень вібрації, що негативно впливає на точність позиціонування матеріалу, а отже, й на якість вишивки нерухомі напрямні з транспортними каретками, вишивальну рамку, що жорстко пов'язана з робочою кареткою, та керовані електроприводи кареток з механізмами переміщення та кроковими електродвигунами Рухома напрямна встановлена з можливістю переміщення уздовж нерухомих напрямних Для цього КІНЦІ рухомої напрямної жорстко закріплені на протилежних транспортних каретках Кроковий електродвигун робочої каретки жорстко закріплений на рухомій напрямній Крокові електродвигуни кареток пов'язані з системою керування Описана конструкція не дозволяє зменшити виникаючи сили інерції та рівень вібрації, що обумовлені великою масою рухомої частини пристрою, зниження якої у даному випадку, при жорсткому зв'язку рухомих елементів, неможливо Тому вона характеризується недостатньою точністю позиціонування матеріалу В результаті, при потужності крокових електродвигунів, яка дорівнює ЮОВт, може бути досягнута продуктивність вишивальної машини не більше 800ст /хв Більш ТОГО, ЦЯ конструкція має велику вагу (8 12кг), що пов'язано з високим рівнем вібрації, при Відомий пристрій для переміщення матеріалу (Рекламна інформація фірми Toyota // Eurostitch Magazine - 1999 -April -№ 36 -p 2), включає розташовані взаємо перпендикулярно рухому напрямну з робочою кареткою та дві паралельні CO о Ю 50374 якому виникає необхідність реалізації додаткових засобів, що направлені на підвищення її надійності ВІДОМІ конструктивні рішення, які дозволяють зменшити сили інерції шляхом зниження рухомої маси за рахунок розташування крокового електродвигуна робочої каретки поза рухомою частиною пристрою При цьому зменшується і рівень вібрації, а це свідчить про забезпечення можливості зниження ваги рухомої частини пристрою не менш, ніж в З рази Ще однією перевагою такого технічного рішення є й те, що воно дозволяє отримати більш збалансовану конструкцію, а отже, можливо вилучити одну з нерухомих напрямних, тобто спростити пристрій і додатково знизити його вагу Найбільш близьким до заявленого по технічній суті та здобутому результату є пристрій для переміщення матеріалу, який містить розташовані взаємно перпендикулярно рухому напрямну з робочою кареткою та дві паралельні нерухомі напрямні з транспортними каретками, вишивальну рамку, що жорстко пов'язана з робочою кареткою, та керовані електроприводи кареток з механізмами переміщення та кроковими електродвигунами, (п Японії № 62-97959, кл ДО5В 21/00 1987) Механізм переміщення робочої каретки включає прикріплений до неї гнучкий елемент, який охоплює барабан та ролик, кожний з яких пов'язаний з ВІДПОВІДНОЮ транспортною кареткою Рухома напрямна, що складається з двох паралельних прутків, встановлена з можливістю переміщення уздовж нерухомих напрямних і відносно крокового електродвигуна робочої каретки 3 цією метою протилежні КІНЦІ прутків попарно жорстко закріплені на ВІДПОВІДНИХ транспортних каретках, а барабан, розташований між провушинами однієї з транспортних кареток, встановлений на ходовому валу крокового електродвигуна робочої каретки з можливістю переміщення уздовж його продольної осі та пов'язаний з валом шляхом шліцевого з'єднання Зазначений електродвигун жорстко закріплений на нерухомій частині пристрою Величина переміщення рухомої напрямної відносно електродвигуна робочої каретки обрана більше за довжину робочого поля пристрою, наприклад 250 - 300мм Для цього ходовий вал крокового електродвигуна робочої каретки виконаний у вигляді шліцевого валу, довжина якого вибрана не менше за вказану величину Крокові електродвигуни кареток пов'язані із системою управління Конструктивне рішення, що описано вище, забезпечує зменшення сил інерції і рівня вібрації, які залежать від величини маси рухомої частини пристрою Однак при цьому суттєво збільшується довжина ходового валу крокового електродвигуна робочої каретки, а отже, знижується його жорсткість у поперечному напрямку В результаті з'являється можливість прогину валу під дією сил інерції, які виникають, що негативно впливає на точність позиціонування матеріалу, а отже, й на якість вишивки Окрім того, такий вал має великий момент інерції, обумовлений його значними розмірами, що відносно обертових рухів є еквівалентно збільшенню маси рухомої частини пристрою Описаний пристрій не дозволяє зменшити вплив сил інерції, бо довжина вказаного вала вибрана з умов безперешкодного переміщення рухомої напрямної по усій довжині робочого поля В наслідок цього, при потужності крокових електродвигунів, яка дорівнює ЮОВт, продуктивність вишивальної машини може бути збільшена не більш, ніж до 10ООст /хв Окрім того, шліцевий вал та барабан є дорогі прецизійні вироби, які під дією значних динамічних навантажень схильні до інтенсивного зносу Таким чином, цей пристрій при низький ЗНОСОСТІЙКОСТІ характеризується високою вартістю Технічна задача, на вирішення якої направлений винахід, полягає у створенні такого пристрою для переміщення матеріалу, при здійсненні якого можливо зменшити сили інерції в елементах його конструкції, а за рахунок цього підвищити точність позиціонування матеріалу, що дозволить підвищити швидкість його переміщення, а отже й продуктивність вишивальних машин, без погіршення якості вишивки Поставлена задача вирішується завдяки тому, що у відомому пристрої для переміщення матеріалу, який включає розташовані взаємно перпендикулярно рухому напрямну з робочою кареткою та принаймні одну нерухому напрямну з транспортною кареткою, вишивальну рамку, що жорстко пов'язана з робочою кареткою, та керовані електроприводи кареток з механізмами переміщення та електродвигунами, при цьому рухома напрямна встановлена з можливістю переміщення уздовж нерухомої напрямної та відносно електродвигуна робочої каретки, згідно з винаходом, електродвигун робочої каретки встановлений з можливістю переміщення паралельно нерухомій напрямній та пов'язаний з керованим електроприводом, а абсолютна величина переміщення рухомої напрямної відносно електродвигуна робочої каретки обрана більше за задану довжину стібка Електродвигун робочої каретки може бути закріплений на додатковій каретці, яка встановлена на нерухомій або додатковій напрямній Додаткова напрямна має бути встановлена паралельно нерухомій напрямній Електродвигун робочої каретки може бути пов'язаний з керованим електроприводом транспортної каретки за допомогою амортизатора Зазначений зв'язок може бути реалізований шляхом поєднання додаткової та транспортної кареток через амортизатор У другому варіанті реалізації електродвигун робочої каретки може бути пов'язаний з додатковим керованим електроприводом Причинно-наслідковий зв'язок між ознаками винаходу й очікуваним технічним результатом обумовлений особливостями роботи вишивальних машин Процес вишивки характеризується складним рухом вишивальної рамки, який являє собою векторну суму двох рухів різького 50374 стрибкоподібного зворотно-поступального руху при виконанні стібка та більш повільного переміщення у ВІДПОВІДНОСТІ з контуром малюнка або ЛІНІЄЮ прокладки стібків У зв'язку з цим динамічні навантаження, які виникають у процесі роботи пристрою, являють собою суму динамічних навантажень, обумовлених кожним з вказаних видів руху Рівень динамічних навантажень залежить від характеру та абсолютного значення величини переміщення рухомої частини пристрою, и маси та від моменту інерції частин ,які обертаються Вся маса рухомої частини пристрою виконує різькій стрибкоподібній рух уздовж нерухомої напрямної і тільки частина цієї маси, а саме вишивальна рамка і її каретка - уздовж рухомої напрямної Остання частина зазначеного руху далі не розглядається тому, що дінамічні навантаження, які виникають при цьому, є не значні Стрібкоподібне переміщення залежить від положення голки вишивальної машини, тому воно здійснюється в стартстопному режимі, який характеризується періодами зупинки, коли голка знаходиться у тканині, та періодами поступального руху з різьким прискоренням та гальмуванням, коли голка знаходиться поза тканиною, і можливістю зміни напрямку руху на наступному стібку В такому випадку величина переміщення рухомої напрямної визначається довжиною стібка, яка наприклад у вишивальних машинах ZSK, дорівнює 0,1 - 12,8мм Складова руху вишивальної рамки ВІДПОВІДНО з контуром малюнка або ЛІНІЄЮ прокладки стібків проходить у межах робочого поля пристрою шляхом поступового переміщення власно вишивальної рамки уздовж рухомої напрямної з одночасним поступовим переміщенням останньої уздовж нерухомої напрямної Ці переміщення не залежать від положення голки вишивальної машини Рівень динамічних навантажень, а отже й сил інерції, що виникають у рухомій частині пристрою при переміщенні по контуру малюнка або лінії прокладки стібків приблизно на два порядка нижче ВІДПОВІДНИХ фізичних величин, характерних для стрибкоподібного руху вишивальної рамки при виконанні стібків Таким чином сили інерції, пов'язані з рухом по контуру малюнка або лінії прокладки стібків не мають суттєвого впливу на точність позиціонування матеріалу Завдяки тому, що електродвигун робочої каретки встановлений з можливістю переміщення паралельно нерухомій напрямній, досягається можливість його спільного переміщення з рухомою напрямною, що дозволяє зменшити довжину кінематичного ланцюга ВІДПОВІДНОГО приводу, а саме довжину валу, який пов'язує елементи конструкції В результаті чого збільшується жорсткість згаданого валу у поперечному напрямку, зменшуються його момент інерції і, як наслідок, зменшуються деформації і вібрації, а отже підвищується точність позиціонування матеріалу у зрівнянні з відомими пристроями При цьому, оскільки абсолютна переміщення рухомої напрямної величина відносно електродвигуна робочої каретки обрана більше за задану довжину стібка, зберігається можливість стрибкоподібного зворотно-поступального переміщення вказаної напрямної при виконанні стібків без залучення в цей процес електродвигуна робочої каретки Таким чином, спільне переміщення вказаних елементів конструкції здійснюється в межах робочого поля тільки при русі вишивальної рамки у ВІДПОВІДНОСТІ З контуром малюнка або ЛІНІЄЮ прокладки стібків, а отже, не призводить до вагомого збільшення динамічних навантажень, здатних суттєво вплинути на точність позиціонування матеріалу при збільшенні рухомої маси пристрою Закріплення електродвигуна робочої каретки на додатковій каретці, яка встановлена на нерухомій напрямній, при простоті конструктивного рішення, забезпечує суворо паралельні переміщення рухомих елементів конструкції При цьому досягається можливість спрощення зв'язку рухомої напрямної з валом вказаного електродвигуна без збільшення динамічних навантажень У запропонованому конструктивному виконанні цей зв'язок здійснюється за допомогою повідкової муфти, що дозволяє значно знизити вартість пристрою та підвищити його ЗНОСОСТІЙКІСТЬ цьому випадку довжина повідка повідкової муфти, наприклад при максимальній довжині стібка 12,8мм, складає приблизно 15мм, що практично на порядок менше довжини ходового валу електродвигуна робочої каретки у відомому пристрої Оскільки ВІДПОВІДНОСТІ рух з вишивальної контуром малюнка рамки або у ЛІНІЄЮ прокладки стібків, а отож, й переміщення електродвигуна робочої каретки паралельно нерухомій напрямній не залежить від положення голки вишивальної машини, то для переміщення електродвигуна робочої каретки може бути використаний додатковий або вже існуючий керований електропривод Більш простим є варіант з використанням існуючого керованого електроприводу Він може бути реалізований, наприклад, шляхом з'єднання додаткової та транспортної кареток через амортизатор, завдяки якому забезпечується демпферування впливу різького стрибкоподібного зворотно-поступального переміщення рухомої напрямної на характер переміщення електродвигуна робочої каретки Оскільки абсолютна величина переміщення вказаної напрямної відносно електродвигуна робочої каретки вибрана більше за задану довжину стібка, забезпечується її переміщення на задану довжину стібка в обидві сторони від початкового положення без залучення в процес згаданого електродвигуна Незважаючи на відносну складність, переважним є другій варіант реалізації пристрою з додатковим керованим електроприводом, який дозволяє чітко відстежувати у ВІДПОВІДНОСТІ З контуром малюнка або ЛІНІЄЮ прокладки стібків, зміну положення рухомої напрямної при переміщенні її в будь-якому напрямку, зберігаючи мінімально можливе віддалення між рухомими елементами конструкції, що має бути більше за задану довжину стібка Оскільки абсолютна 50374 величина переміщення рухомої напрямної відносно електродвигуна робочої каретки вибрана більше за задану довжину стібка, забезпечується її мінімально можлива рухомість, необхідна для стрибкоподібного переміщення на задану довжину стібка без залучення електродвигуна робочої каретки В результаті обидва варіанти реалізації пристрою дозволяють зменшити сили інерції, які виникають в елементах його конструкції, та, таким чином, підвищити точність позиціонування матеріалу, що забезпечує можливість збільшити продуктивність вишивальної машини, при потужності крокових електродвигунів, яка дорівнює ЮОВт, до 1200ст/хв без погіршення якості вишивки Перевагою першого з описаних варіантів реалізації є простота конструктивного виконання, що сутьтево при використанні пристрою як вишивальної приставки до швейних машин Перевагою другого варіанту реалізації є мінімальний рівень динамічних навантажень, що обумовлені збільшенням рухомої маси пристрою за рахунок введення рухомого електродвигуна робочої каретки Це досягається завдяки використанню додаткового керованого електроприводу, який забезпечує незалежне переміщення електродвигуна робочої каретки, що дозволяє повністю виключити вплив характеру переміщення рухомої напрямної на характер переміщення зазначеного електродвигуна За рахунок цього може бути реалізовано рівномірне переміщення згаданого електродвигуна у ВІДПОВІДНОСТІ з контуром малюнка або ЛІНІЄЮ прокладки стібків і, таким чином, мінімізувати виникаючи при цьому динамічні навантаження Додатковою перевагою цього варіанту реалізації є можливість зміни заданої довжини стібка під час роботи пристрою без переналадки його механічної частини за допомогою системи керування На фіг 1 представлена функціональна схема одного варіанту реалізації пристрою, а на фіг 2 другого варіанту реалізації цього ж пристрою Пристрій для переміщення матеріалу містить (див фіг 1,2) розташовані взаємо перпендикулярно рухому напрямну 1 з робочою кареткою 2 та нерухому напрямну 3 з транспортною кареткою 4, вишивальну рамку 5, жорстко пов'язану з робочою кареткою 2, та керовані електроприводи кареток 2, 4 з механізмами переміщення та електродвигунами 6,7 Механізм переміщення робочої каретки 2 включає прикріплений до неї гнучкий елемент, наприклад зубчастий ремінь 8, який охоплює шківи 9, 10, що розміщені на ведучому та відомому валах 11, 12 ВІДПОВІДНО Ведучий вал 11 встановлений на опорних стійках 13, 14, а відомий вал 12 - на опорних стійках 15, 16 Опорні стійки 13, 14 та 15,16 попарно закріплені на протилежних кінцях рухомої напрямної 1, яка має, наприклад, форму рейки Механізм переміщення транспортної каретки 4 включає прикріплений до неї гнучкий елемент, наприклад зубчастий ремінь 17, який охоплює 8 шківи 18, 19 Шків 18 розташований на валу електродвигуна 7 транспортної каретки 4, а шків 19 - на нерухомій СТІЙЦІ 20 Рухома напрямна 1 встановлена з можливістю переміщення уздовж нерухомої напрямної 3 та відносно електродвигуна 6 робочої каретки 2 Для цього, наприклад, один кінець рухомої напрямної 1 жорстко закріплений на транспортній каретці 4, а ведучий вал 11 пов'язаний з валом вказаного електродвигуна 6 за допомогою повідкової муфти 21 Електродвигун 6 робочої каретки 2 встановлений з можливістю переміщення паралельно нерухомій напрямній З З цією метою він закріплений, наприклад, на додатковій каретці 22, яка встановлена на нерухомій напрямній З Крім того, згаданий електродвигун 6 пов'язаний з керованим електроприводом, а абсолютна величина переміщення рухомої напрямної 1 відносно електродвигуна 6 обрана більше за задану довжину стібка, наприклад максимальну довжину стібка, що дорівнює 12,8мм При цьому довжина повідка повідкової муфти дорівнює 15мм В одному з наведених варіантів реалізації електродвигун 6 робочої каретки 2 пов'язаний з керованім електроприводом транспортної каретки 4 (див фіг 1) Цей зв'язок виконаний, наприклад, у вигляді з'єднання додаткової каретки 22 з транспортною кареткою 4 через амортизатор, наприклад, пружину 23 В другому з запропонованих варіантів реалізації електродвигун 6 робочої каретки 2 пов'язаний з додатковим керованим електроприводом (див фіг 2), який містить додатковий електродвигун 24 та механізм переміщення згаданого електродвигуна 6 Зазначений механізм переміщення включає гнучкий елемент, наприклад, зубчастий ремінь 25, який охоплює шківи 26 та 27, причому шків 26 розташовані на валу додаткового електродвигуна 24, а шків 27 - на нерухомій СТІЙЦІ 28 Зв'язок електродвигуна 6 робочої каретки 2 з додатковим керованім електроприводом виконаний у вигляді з'єднання додаткової каретки 22 з зубчастим ременем 25 Електродвигуни 6,7 та 24 пов'язані з системою керування (на фіг 1,2 не показано) Пристрій працює наступним чином По сигналу системи керування одночасно вмикаються електродвигуни 6,7 Від електродвигуна 6 вишивальна рамка 5 одержує переміщення по осі У (див фіг 1,2) Рух від валу вказаного електродвигуна 6 через повідкову муфту 21 передається ведучому валу 11 та далі шківу 9, а потім через зубчастий ремінь 8 робочій каретці 2, переміщуючи її по осі У уздовж рухомої напрямної 1 Спільно з робочою кареткою 2 переміщується вишивальна рамка 5 Величина цього переміщення ДІувр дорівнює заданому значенню переміщення по осі У у ВІДПОВІДНОСТІ З контуром малюнка або ЛІНІЄЮ прокладки стібків Ду, тобто ДІувр = Ду Від електродвигуна 7 вишивальна рамка 5 одержує переміщення по осі X (див фіг 1,2) Рух від вала згаданого електродвигуна 7 передається 50374 шківу 18, потім через зубчастий ремінь 17 транспортній каретці 4, а отже, й рухомій напрямній 1, переміщуючи їх по осі X уздовж нерухомої напрямної 3 Спільно з рухомою напрямною 1 переміщується встановлена на неї робоча каретка 2 з вишивальною рамкою 5 Величина цього переміщення дорівнює сумі заданої довжини стібка Іст та заданого значення переміщення по осі X у ВІДПОВІДНОСТІ з контуром малюнка або ЛІНІЄЮ прокладки стібків Дх, тобто ДІх вр = ДІх рн = Іст + Дх, де ДІх вр - величина переміщення вишивальної рамки по осі X, ДІх рн - величина переміщення рухомої напрямної по осі X Одночасно переміщення по осі X одержує електродвигун 6 В першому з описаних варіантів конструктивного виконання (див фіг 1) електродвигун 6 одержує переміщення від електродвигуна 7 транспортної каретки 4 Рух від транспортної каретки 4 одночасно передається рухомій напрямній 1 та через пружину 23 додатковій каретці 22, а отже, й електродвигуну 6, одночасно переміщуючи їх уздовж нерухомої напрямної 3 відносно початкового положення Пружина 23 демпферує швидкість переміщення вказаного електродвигуна 6 по зрівнянню з швидкістю переміщення рухомої напрямної 1 В результаті виникає переміщення рухомої напрямної 1 відносно електродвигуна 6 При будь-якому напрямку переміщення відносно початкового положення абсолютна величина переміщення електродвигуна 6 ДІх дв менша величини переміщення рухомої напрямної 1 ДІх рн приблизно на задану довжину стібка Іст , а 10 отже, приблизно дорівнює заданому значенню переміщення по осі X у ВІДПОВІДНОСТІ з контуром малюнка або ЛІНІЄЮ прокладки стібків Ах, тобто ДІх дв = ДІх рн - Іст и Дх В іншому з описаних варіантів виконання (див фіг 2) електродвигун 6 одержує переміщення від додаткового електродвигуна 24, який також вмикається по сигналу системи управління одночасно з електродвигунами 6,7 Рух від валу додаткового електродвигуна 24, передається шківу 26, потім через зубчастий ремінь 25 додатковій каретці 22, а отже, й згаданому електродвигуну 6, переміщуючи його уздовж нерухомої напрямної 3 одночасно з рухомою напрямною 1 Величина цього переміщення ДІх дв задається системою управління та дорівнює заданому значенню переміщення по осі X у ВІДПОВІДНОСТІ з контуром малюнка або ЛІНІЄЮ прокладки стібків, тобто ДІх дв = Дх Таким чином, в обох варіантах реалізації забезпечується переміщення по осі X рухомої напрямної 1, а отже, й вишивальної рамки 5 на будь-яку задану довжину стібка При цьому переміщення електродвигуна 6 по осі X здійснюється у ВІДПОВІДНОСТІ з контуром малюнка або ЛІНІЄЮ прокладки стібків, а отже, виникаючи при цьому динамічні навантаження не мають суттєвого впливу на точність позиціонування матеріалу Мінімізація цих навантажень забезпечується в другому варіанті реалізації пристрою за допомогою системи керування, яка в даному випадку повністю усуває дію сил інерції від електродвигуна 6 і додаткової каретки 22 на рухому напрямну 1 1Т ФІг.1 11 12 50374 17 Фіг. 2 ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна ( 0 4 4 ) 4 5 6 - 2 0 - 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71
ДивитисяДодаткова інформація
Назва патенту англійськоюAppliance for material advance
Назва патенту російськоюУстройство для перемещения материала
МПК / Мітки
МПК: D05C 9/00, D05B 21/00
Мітки: переміщення, пристрій, матеріалу
Код посилання
<a href="https://ua.patents.su/6-50374-pristrijj-dlya-peremishhennya-materialu.html" target="_blank" rel="follow" title="База патентів України">Пристрій для переміщення матеріалу</a>
Пристрій для переміщення листового матеріалу
Номер патенту: 12145
Опубліковано: 25.12.1996
Автори: Гребенчук Борис Петрович, Покровскій Ростіслав Ігоревич
МПК: B21D 43/00
Мітки: пристрій, матеріалу, листового, переміщення
Формула / Реферат:
1. Устройство для перемещения листового материала, содержащее кассеты для размещения стоп листов, механизм шагового перемещения кассет, механизм выравнивания стопы и механизм шагового перемещения стопы, связанный с пневмосетью, отличающееся тем, что, с целью повышения надежности в работе и производительности процесса перемещения, механизм шагового перемещения выполнен в виде шагового транспортера, кассеты смонтированы последовательно одна...
Пристрій для переміщення матеріалу в відвал
Номер патенту: 4487
Опубліковано: 27.12.1994
Автори: Бугайов Сергій Семенович, Бугайов Семен Петрович
МПК: E21C 47/00
Мітки: переміщення, відвал, матеріалу, пристрій
Формула / Реферат:
Устройство для перемещения материала в отвал, включающее отвалообразователь, рама ходового оборудования которого связана с рамой разгрузочной тележки отвального конвейера, отличающееся тем, что, с целью повышения надежности работы при продольной укладке пород в отвал, связь рамы ходового оборудования отвало-образоватсля с рамой разгрузочной тележки отвального конвейера выполнена в виде тяг, шарнирно связанных между собой с образованием...
Пристрій для регулювання швидкості переміщення стрічкового матеріалу
Номер патенту: 2663
Опубліковано: 26.12.1994
Автори: Позняк Григорій Іванович, Пєтухов Аркадій Дем'янович, Ясь Василь Михайлович, Музиченко Олег Олександрович, Крамаренко Євген Федорович
МПК: B65H 23/04
Мітки: швидкості, стрічкового, переміщення, матеріалу, пристрій, регулювання
Формула / Реферат:
1. Устройство регулирования скорости перемещения ленточного материала, содержащее компенсатор, имеющий два стационарных вала и размещенный между ними натяжной подвижный в вертикальной плоскости ролик с датчиком его положения и преобразователь положения натяжного ролика, соединенный с исполнительным механизмом электродвигателя, отличающееся тем, что, с целью повышения надежности в работе, преобразователь положения натяжного ролика имеет...
Пристрій для контролю відносного переміщення рослинного матеріалу
Номер патенту: 1389
Опубліковано: 25.03.1994
Автори: Рихва Володимир Ярославович, Сердюк Михайло Ілліч, Руденко Валерій Павлович, Ілюхін Анатолій Васильович, Сакало Микола Григорович, Сакало Лев Григорович, Кірхбергер Франц
МПК: A01C 7/00, A01C 7/18, A01B 69/04
Мітки: матеріалу, рослинного, переміщення, контролю, відносного, пристрій
Формула / Реферат:
1. Устройство для контроля относительного перемещения растительного материала, содержащее генератор электромагнитных колебаний, емкостный датчик с элементами крепления электродов, общий экран, усилитель и блок обработки сигналов, причем, выход генератора электромагнитных колебаний связан с первым электродом емкостного датчика, второй электрод которого подключен к соответствующему входу усилителя, а общий экран подсоединен к общему выходу...
Пристрій для переміщення матеріалів на швейній машині
Номер патенту: 42536
Опубліковано: 15.10.2001
Автори: Висовень Олег Миколайович, Горобець Василь Андрійович
МПК: D05B 27/00
Мітки: швейний, матеріалів, машини, переміщення, пристрій
Формула / Реферат:
1. Пристрій для переміщення матеріалів на швейній машині, що містить притискний пристрій, транспортуючий орган, встановлений з можливістю здійснення обертального руху, та голкову пластину з пазом, розташовану над транспортуючим органом, який відрізняється тим, що транспортуючий орган виконаний у вигляді двох сполучених між собою гвинтів, на зовнішній стороні гвинтових ліній яких розташовані робочі поверхні у вигляді шорстких ділянок гвинтових...
Попередній патент: Спосіб одержання препарату похідних хімотрипсин-трипсинподібних протеолітичних ферментів для парентерального введення
Наступний патент: Інгібітор сірководневої корозії сталі
Випадковий патент: Спосіб функціонування вертикальної розмелювальної машини у режимі безперервного сухого перемелювання та вертикальна розмелювальна машина