Спосіб відновлення внутрішньої структури тривимірного об’єкта
Номер патенту: 78569
Опубліковано: 10.04.2007
Автори: Сергієнко Іван Васильович, Литвин Олег Миколайович, Литвин Олег Олегович



Формула / Реферат
Спосіб відновлення внутрішньої структури тривимірного об'єкта, що передбачає опромінення об'єкта в різних напрямках за допомогою джерела проникаючого опромінення, отримання знімків як результату такого опромінення, який відрізняється тим, що опромінення об'єкта виконують у трьох взаємно перпендикулярних напрямках, отримані три знімки перетворюють у електронний вигляд, наприклад у файли bmp-формату, на основі яких отримують функціональні залежності ![]() ,
, ![]() ,
, ![]() , що являють собою аналітичні вирази для усереднених попіксельних щільностей картин, зображених на першому, другому та третьому знімках відповідно, а значення об'ємної щільності
, що являють собою аналітичні вирази для усереднених попіксельних щільностей картин, зображених на першому, другому та третьому знімках відповідно, а значення об'ємної щільності ![]() у точці з координатами
у точці з координатами ![]() визначають за формулою
визначають за формулою
![]() , де
, де
u(k,ℓ) - функція інтенсивності сірого кольору в пікселі з горизонтальною координатою k та вертикальною координатою ℓ на першому знімку;
ν(k,m)- функція інтенсивності сірого кольору в пікселі з горизонтальною координатою k та вертикальною координатою m на другому знімку;
w(ℓ,m) - функція інтенсивності сірого кольору в пікселі з горизонтальною координатою ℓ та вертикальною координатою m на третьому знімку;
Dx, Dy, Dz - масштабуючі множники зображень,
причому останні чотири доданки реалізують із урахуванням попіксельного задання функцій ![]() ,
, ![]() ,
, ![]() у вигляді:
у вигляді:
![]() ;
;
![]() ;
;
![]() ;
;
![]() , де
, де
N – кількість пікселів.
Текст
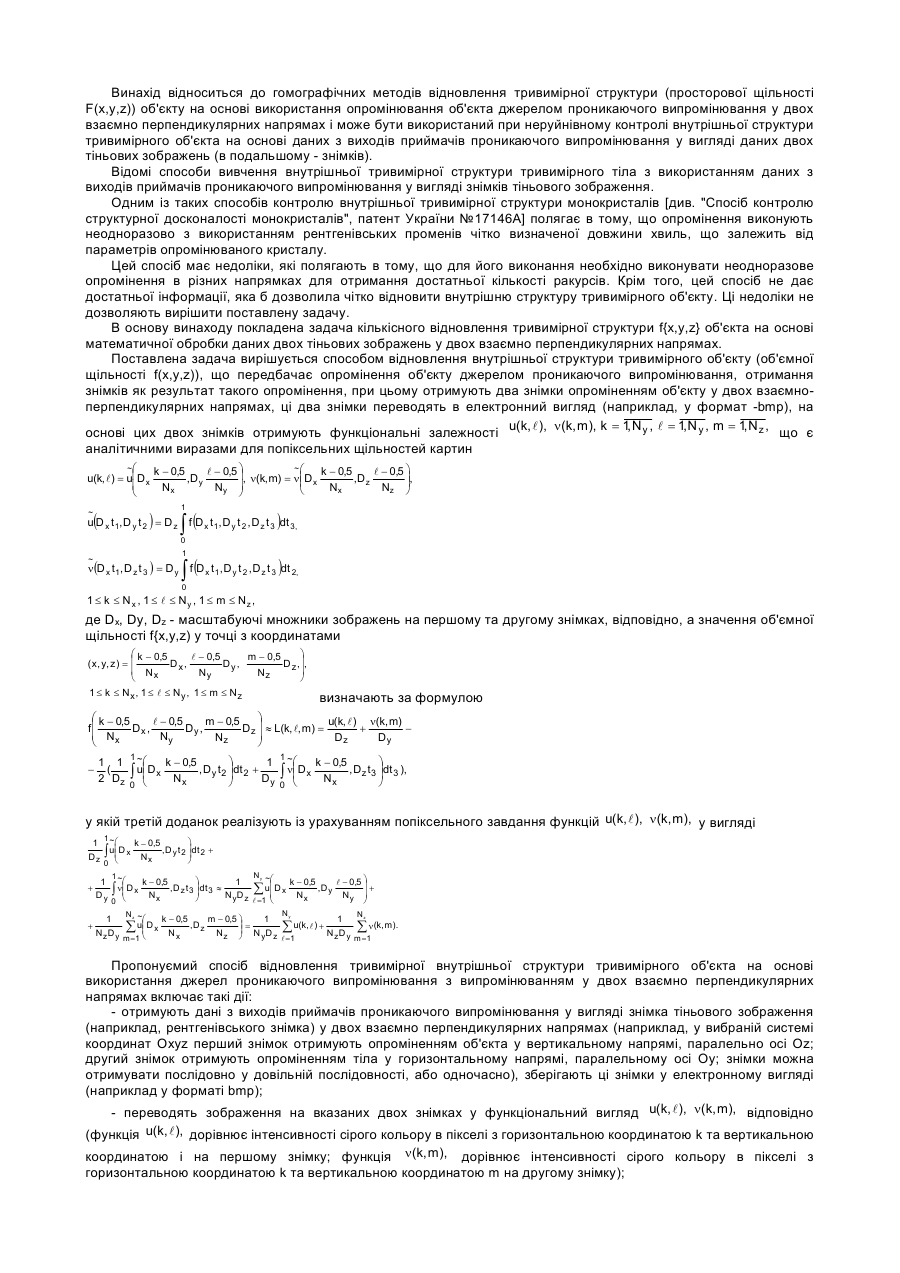
Спосіб відновлення внутрішньої структури тривимірного об'єкта, що передбачає опромінення об'єкта в різних напрямках за допомогою джерела проникаючого опромінення, отримання знімків як результату такого опромінення, який відрізняється тим, що опромінення об'єкта виконують у трьох взаємно перпендикулярних напрямках, отримані три знімки перетворюють у електронний вигляд, наприклад у файли bmp-формату, на основі яких отримують функціональні залежності u( x, y) , 2 3 78569 ристанням рентгенівських променів чітко визначеної довжини хвиль, що залежить від параметрів опромінюваного кристалу. Цей спосіб має недоліки, які полягають в тому, що для його виконання необхідно виконувати неодноразове опромінення в різних напрямках для отримання достатньої кількості ракурсів. Крім того, цей спосіб не дає достатньої інформації, яка б дозволила чітко відновити внутрішню стр уктуру тривимірного об'єкту. Ці недоліки не дозволяють вирішити поставлену задачу. В основу винаходу покладена задача створити спосіб кількісного відновлення внутрішньої тривимірної структури f(x,y,z} об'єкту, який би дозволив за допомогою трьох знімків у взаємно перпендикулярних напрямах, як результатів опромінювання, з високою достовірністю відновити внутрішню стр уктур у об'єкту. Поставлена задача вирішується способом відновлення внутрішньої структури тривимірного об'єкту, що передбачає опромінення об'єкту в різних напрямах, отримання знімків як результат такого опромінення, при цьому три знімки отримують опроміненням об'єкту у трьох взаємноперпендикулярних напрямах, задають ці знімки у електронному вигляді (наприклад, у форматі .bmp), на основі цих трьох знімків отримують функціональні залежності u(k, l ), n (k, m ), w ( l, m ) , що є аналітичними виразами для попіксельних щільностей картин (1 £ k, l, m £ N, D x , D y , D z - масштабуючі множники) 1 æ k - 0,5 l - 0,5 ö k - 0,5 l - 0,5 ö æ u(k, l) = ~ç D x ,Dy ÷ = Dz ò fçDx ,Dy D z t 3 ÷dt 3, ç ÷ uè N N ø Nx N 0 è ø 1 æ ö æ k - 0,5 m - 0,5 ö k - 0,5 m - 0 ,5 n(k, m) = ~ç Dx , Dz ÷ = D y ò f ç Dx , Dy t 2,Dz Dz t 3 ÷dt 2 , ç ÷ nè N N ø Nx N 0 è ø 1 æ æ l - 0,5 m - 0,5 ö l - 0,5 m - 0,5 ö w( l, m) = ~ç Dy ,D z ç , Dz ÷dt , ÷ =D x ò f ç Dx t 1, D y wè N N ø Nx N ÷ 1 0 è ø зображених на першому, др угому та третьому знімках, відповідно, а значення об'ємної щільності f(x,y,z) у точці з координатами æ k - 0,5 ö l - 0,5 m - 0,5 ( x, y, z ) = ç Dx , Dy , D z ,÷, 1 £ k , l,m £ N, ç N ÷ N N è ø визначають за формулою æ k - 0,5 ö l - 0, 5 m - 0,5 u(k, l ) n(k, m) w(l, m) 1 1 1 ~ æ k - 0, 5 ö fç Dx, Dy, Dz , ÷ » L (k, l, m) = + + - ( , D y t 2 ÷ dt 2 + ò uçD x ç N ÷ N N Dz Dy Dz 2 Dy 0 è N ø è ø + 1 1 ~æ k - 0,5 ö 1 1 1 ~æ l - 0, 5 ö 1 1 ~æ l - 0, 5 ö , Dz t 3 ÷dt 3 ) - ( , D zt 3 ÷dt 3 ) ò nç D x ò u çD x t1 , Dy ÷dt 1 + ò wç Dy Dx 0 è N 2 Dx 0 è N ø Dz 0 è N ø ø 1 1 1 ~æ l - 0,5 ö 1 1 ~æ l - 0,5 ö ( ÷ dt 1 + , D z t 3 ÷ dt 3 ) + ò nç Dx t 1, D y ò wç D y 2 Dx 0 è N ø Dz 0 è N ø + 1 1 11~ 1 1 1~ 1 1 1 w D t , D t dt dt ), y 2 z3 2 2 ( ò ò u(Dx t 1, D y t 2 )dt 1dt 2 + ò ò n (D xt 1, D z t 3 )dt 1dt 3 + ò ò 3 Dz 0 0 Dy 0 0 Dx 0 0 ~ ( ) у якій четвертий, п'ятий, шостий та сьомий доданки реалізують із урахуванням попіксельного завдання функцій u(k, l), n(k, m), w (l, m) у вигляді ö 1 1~ æ k - 0,5 1 1 ~æ k - 0,5 ö 1 1 N ~æ k - 0,5 l - 0,5 ö ÷+ , Dy t 2 ÷dt 2 + ,D z t3 ÷ dt3 » ( å uç Dx ,Dy ò uç Dx ò nç D x ÷ ÷ Dy 0 ç N Dz 0 ç Nx N Dy l =1 ç N N ÷ è ø è ø è ø N N 1 N ~æ k - 0,5 m - 0,5 ö ÷ ) = 1 ( 1 åu(k, l) + 1 å n(k ,m). + ,Dz å n ç Dx Dz m=1 ç N N ÷ N D y l =1 Dz m =1 è ø 4 1~ 1 1~ æ l - 0,5 ö ÷ dt + 1 ò w æ D l - 0,5 , D t ödt » ç y ò uç Dx t1,D y 1 z 3÷ 3 ÷ Dx 0 ç N ÷ Dz 0 ç Nx è ø è ø 1 N ~æ l - 0,5 m - 0,5 ö 1 1 N 1 ÷ )= ( + å wç Dy ,Dz å u(k, l) + ÷ D z m =1 ç N N N Dx k =1 Dz è ø æ ö ö 1 1 ~ç l - 0,5 ÷ 1 1 ~ æ l - 0,5 dt1 + ,D z t3 ÷ dt3 » ÷ ò n Dx t1,D y ò w ç Dy Dx 0 ç N ÷ Dz 0 ç Nx è ø è ø + 1 N ~æ l - 0,5 m - 0,5 ö ÷ å wç D , Dz ÷ D z m =1 ç y N N è ø ( )= 1 1 N ~æ k - 0,5 l - 0,5 ö ÷+ ( , Dy å uç D x N D x l =1 ç N N ÷ è ø N å w( l, m). m =1 æ ö 1 1 N ~ç k - 0,5 l - 0,5 ÷ ( , Dy + ån Dx N D x k =1 ç N N ÷ è ø 1 1 N 1 N ( å n( k, l) + å w(l,m). N D x k =1 D z m =1 ) ( ) 1 1 1~ 1 11 ~ 1 1 1~ ò ò u D x t1, Dy t2 dt1dt2 + ò ò n(Dx t1,Dz t 3 )dt1dt2 + ò ò w D y t2, Dz t3 ) dt2dt2 » Dz 0 0 Dy 0 0 Dx 0 0 » 1 N2 N + å N N ~æ ( å å u ç Dx k = 1 l= 1 ç è N ~æ å wç D y ç è k =1 m =1 ö æ ö k - 0,5 l - 0,5 ÷ N N ~ç k - 0,5 m - 0,5 ÷ , Dy + å å n Dx , Dz + ÷ N N ÷ k =1 m =1 ç N N ø è ø N N N N N N l - 0,5 m - 0,5 ö ÷ ) = 1 ( 1 å å u(k ,l) + 1 å å n (k, m) + 1 å å w( l, m). ,D z N N ÷ D y k = 1 m= 1 D x l =1 m =1 N2 Dz k =1 l= 1 ø Спосіб відновлення тривимірної внутрішньої структури тривимірного об'єкта на основі використання джерел проникаючого випромінювання з випромінюванням у трьох взаємно перпендикулярних напрямах, що включає такі дії: отримують дані з виходів приймачів проникаючого випромінювання у вигляді знімків тіньового зображення (наприклад, рентгенівських знімків) у трьох взаємно перпендикулярних напрямах (у вибраній системі координат Oxyz перший знімок отримують опроміненням тіла у вертикальному напрямі, паралельно осі Oz; др угий знімок отримують опроміненням тіла у горизонтальному напрямі, паралельному осі Оу; третій знімок отримують опроміненням тіла у горизонтальному напрямі, паралельному осі Ох; знімки можна отримувати послідовно, у довільній послідовності, або одночасно); зберігають ці "знімки" у електронному вигляді, (наприклад у форматі .bmp); переводять зображення на вказаних трьох "знімках" у ~ ~ ~ функціональний вигляд u( x, y ), n( x, z ), w( y, z ), які у попіксельній формі позначаємо як u(k, l), n (k, m), w ( l, m), 1 £ k, l, m £ N відповідно (функція u(k, l ) дорівнює інтенсивності сірого кольору в пікселі з горизонтальною координатою k та вертикальною координатою l на першому знімку; функція n (k, m) дорівнює інтенсивності сірого кольору в пікселі з горизонтальною координатою k та вертикальною координатою m на другому знімку; функція w(l ,m) дорівнює інтенсивності сірого кольору в пікселі з горизонтальною координатою l та вертикальною координатою m на третьому знімку); визначають щільність f(x,y,z) досліджуваного тіла в точці з координатами æ k - 0,5 l - 0,5 m - 0,5 ö ÷, 1 £ k, l, m £ N, ( x, y, z ) = ç D x , Dy , Dz ç ÷ N N N è ø у вигляді L( k, l,m) = u( k, l) n( k, m) w (l, m) + + - g12( m) - g13(l ) - g23(k ) + g123; Dz Dy Dz g23( k ) = 1 1 N 1 N 1 1 N 1 ( å u(k , l) + å n(k ,m )); g13(l ) = ( å u( k, l) + 2 ND z l = 1 ND y m = 1 2 ND z k = 1 ND g12(m) = 1 1 N 1 N ( å n(k , m) + å w( l,m )); 2 ND y k= 1 ND x l = 1 g123 = æ ö N N N N N N 1ç 1 1 1 ÷ å å u( k, l ) + å å n( k, m) + å å w ( l, m) ÷ 3 ç DzN 2 k = 1 l = 1 DyN 2 k = 1 m = 1 D xN2 l = 1m = 1 è ø N å w (l, m)); m= 1 5 78569 Спосіб включає такі дії: перший знімок отримують опроміненням досліджуваного тіла (об'єкта) проникаючим випромінюванням у вертикальному напрямі, паралельно осі Oz; другий знімок отримують опроміненням тіла у горизонтальному напрямі, паралельному осі Оу; третій знімок отримують опроміненням тіла у горизонтальному напрямі, паралельному осі Ох; знімки можна отримувати послідовно у довільній послідовності, або одночасно; проникаюче випромінювання повинно мати потужність, достатню для отримання тіньових проекцій з необхідною роздільною здатністю; отримують всі три знімки в електронному варіанті (наприклад, у форматі .bmp); приводять отримані знімки до однієї трьохвимірної системи координат Oxyz покладаючи, що досліджуване тіло повністю розміщене в одиничному кубі 0 £ x, y, z £ 1; приводять зображення на цих трьох знімках до функціональних, визначених в квадратній області з кількістю пікселів N x N (назвемо ці функції u(k, l ), n(k, m), w (l, m), відповідно; функція u(k, l ) для даних значень (k, l ) дорівнює інтенсивності сірого кольору в пікселі, що знаходиться на перетині горизонталі з номером k та номером вертикалі з номером l на першому знімку; функція n (k, m) для даних значень (k,m) дорівнює інтенсивності сірого кольору в пікселі, що знаходиться на перетині горизонталі з номером k та номером вертикалі з номером т на другому знімку; функція w(l ,m) для даних значень w(l ,m) дорівнює інтенсивності сірого кольору в пікселі, що знаходиться на перетині горизонталі з номером l та номером вертикалі з номером m на третьому знімку; вказані дії з першим, другим та третім знімками виконують послідовно, у різних з'єднаннях, або одночасно); визначають щільність f{x,y,z} досліджуваного тіла у точці з координатами æ k - 0,5 l - 0,5 m - 0,5 ö ÷, 1 £ k, l, m £ N, ( x, y, z ) = ç D x , Dy , Dz ç ÷ N N N è ø як суму чисел u(k, l) n(k, m) w (l, m) , та мінус сума Dz Dy Dz чисел g12(m), g13(l ), g23(k) плюс число g123, f( x, y, z) » L( k, l,m ) = u(k, l ) n( k, m ) w( l, m ) + + - g12 (m ) - g13( l ) - g23 (k ) + g123 Dz Dy Dz , де g12(z ) отримують додаванням чисел n (x,z), відповідних різним номерам пікселів вздовж осі Ох на другому знімку (при фіксованому значенні номера z на другому знімку) та додаванням чисел w(y,z), відповідних різним номерам пікселів вздовж осі Оу на третьому знімку (при фіксованому значенні номера z на третьому знімку), діленні отриманої суми на число пікселів N і на 2; 1 1 N 1 N g12(m) = ( å n(k, m) + å w (l, m)); (6) 2 ND y k =1 ND x l=1 число g13( y) отримують додаванням чисел u(х, у), відповідних різним номерам пікселів вздовж осі Ох на першому знімку (при фіксованому 6 значенні номера у на першому знімку) та додаванням чисел w(y, z), відповідних різним номерам пікселів вздовж осі Oz на третьому знімку (при фіксованому значенні номера у на третьому знімку), діленні отриманої суми на число пікселів N і на 2; 1 1 N 1 N g13( y) = ( å n(i, y ) + å w ( y, l )); (7) 2 ND y i=1 N l =1 число g23(x ) отримують додаванням чисел u(х, у), відповідних різним номерам пікселів вздовж осі Ох на першому знімку (при фіксованому значенні номера у на першому знімку) та додаванням чисел n (x,z), відповідних різним номерам пікселів вздовж осі Oz на третьому знімку (при фіксованому значенні номера х на третьому знімку), діленні отриманої суми на число пікселів N і на 2; 1 1 N 1 N g23( x) = ( å u( x, k) + å n( x, l)); (8) 2 N k =1 N l =1 число g123 отримують попіксельним додаванням чисел g23(x ) , відповідних різним значенням х, попіксельним додаванням до цієї суми чисел g13( y) , відповідних різним значенням у, попіксельним додаванням до цієї суми чисел g12(z ) , відповідних різним значенням z, діленням отриманої суми на три і на число пікселів N. 1 æ N ö g123 = ç å g12(k ) + g13(k ) + g23(k ) ÷ (9) ÷ 3N ç k =1 è ø В основу пропонованого способу покладена формула (1), яка отримується з наступної формули (11). Хай ( ) 1 1 1 0 0 0 u( x, y) = ò f( x, y, z)dz; n( x, z) = ò f( x, y, z)dy; w ( y, z ) = ò f ( x, y, z )dx; Вважаємо, що функціональні залежності u(x,y), n {x,z), w(y,z) визначають аналітичні попіксельні вирази для щільностей картин, зображених на першому, другому і третьому знімках, відповідно. Тоді функція трьох змінних L( x, y, z) = u( x, y ) + n( x, z ) + w( y, z ) - g12( z) - g13( y) - g23(x ) + g123 (11) 11 1 ö 1æ 1 g23( x ) = ò ò f ( x, y, z )dydz = ç ò u( x, y ) dy + ò n ( x, z ) dz ÷; ÷ 2ç0 00 è 0 ø 11 1 ö 1æ 1 g13( y ) = ò ò f ( x, y, z )dxdz = ç ò u( x, y ) dx + ò w( y, z ) dz ÷; (12) ÷ 2ç 0 00 è 0 ø 11 1 ö 1æ1 g12( z ) = ò ò f( x, y, z) dxdz = ç ò n ( x, z )dx + ò w( y, z )dy ÷. ÷ 2ç0 00 0 è ø 111 g123 = ò ò ò f( x , y , z )dxdydz = 000 11 11 1 æ 11 ö ç ò ò u( x, y )dxdy + ò ò n( x, z) dxdz + ò ò w( y , z )dydz ÷ ÷ 3 ç 00 è 00 00 ø (13) має наступні властивості 1 ò L (x, y, z )dz = u( x, y ); (14) 0 1 ò L (x, y, z )dy = n( x, y); (15) 0 1 ò L (x, y, z )dx = w ( y, z); (16) 0 (Литвин О.М. Інтерлінація функцій та деякі її застосування. Харків: Основа, 2002.- 544с.) 7 78569 Якщо ми досліджуємо функцію 0 £ X £ Dx , 0 £ Y £ Dy , 0 £ Z £ D z, то F(X,Y,Y), заміною змінних X xD x , Y yD y , Z zD z , 0 £ x, y, z £ 1 = = = зводимо задачу до дослідження функції f (x, y, z= F( xd x , yD y , zD z ), 0 £ x, y, z £ 1 . ) Тобто, якщо u(х, у), n (x, z), w(y, z) - аналітичні вирази (у попіксельній формі) зображених на першому, др угому та третьому знімках картинок, відповідно, то запропонований спосіб дає попіксельну реалізацію формули (11), заміною інтегрування відповідними формулами попіксельного сумування. При цьому використовують для сумування другу частин у формул (2)-(3) з метою зменшення величини похибки, що може виникнути на практиці, коли рентгенівські пристрої, за допомогою яких отримуються знімки, мають значення геометричних та фізичних параметрів, що визначають якість знімків, відмінні від номінальних значень. Тобто, остаточний вираз для знаходження щільності тіла в точці з координатами (x,y,z) може бути зображений у вигляді L(x, y, z ) = u(x , y ) + n( x, z ) + w( y, z ) 1 N å (u(x, k ) + u(k, y ) + n(k , z ) + w(k, z ) + w( y, k )) + (17) 2N k =1 + 8 Формула (11) є точною для тих випадків, коли просторовий розподіл щільності досліджуваного об'єкта f(x, y, z) зображується у вигляді суми трьох функцій, перша з яких (позначимо її для визначеності g1(x,y)) залежить від змінних х, у, друга (позначимо її для визначеності g2 (x, z)) залежить від змінних x,z, третя (позначимо її для визначеності g3 (y, z)) залежить від змінних y,z, тобто, коли f (x, y, z ) = g1(x, y) + g2 (x, z) + g3( y, z ). Формула (1) отримується з формули (11) заміною однократних та двократних інтегралів 1 1 1 1 0 0 1 0 1 0 0 ò u( x, y)dx, ò u( x, y) dy, ò n( x, z )dx, ò n( x, z)dz, ò w ( y, z )dz, ò w( y, z)dy, 0 11 11 11 00 00 00 та ò ò u (x, y)dxdy, ò ò n (x, z)dxdz, ò ò w ( y, z )dydz, відповідними квадратурними формулами (однократними сумами) і кубатурними формулами (двократними сумами) центральних прямокутників. Якщо інтенсивність опромінення тіла проникаючим випромінюванням достатня для отримання чіткого зображення тіньових проекцій, то послідовність попіксельних дій з отриманими трьома знімками приводить до отримання конкретного значення щільності у точці з координатами {x,y,z}. 1 N N å å (u(k, m) = n(k ,m )w(k, m)) 3N k =1m =1 Комп’ютерна в ерстка Д. Шев ерун Підписне Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for displaying the internal structure of a three-dimensional object
Автори англійськоюSerhiienko Ivan Vasyliovych, Lytvyn Oleh Mykolaiovych, Lytvyn Oleh Olehovych
Назва патенту російськоюСпособ отображения внутренней структуры трехмерного объекта
Автори російськоюСергиенко Иван Васильевич, Литвин Олег Николаевич, Литвин Олег Олегович
МПК / Мітки
МПК: G01N 23/22
Мітки: відновлення, об'єкта, тривимірного, спосіб, внутрішньої, структури
Код посилання
<a href="https://ua.patents.su/4-78569-sposib-vidnovlennya-vnutrishno-strukturi-trivimirnogo-obehkta.html" target="_blank" rel="follow" title="База патентів України">Спосіб відновлення внутрішньої структури тривимірного об’єкта</a>
Спосіб відновлення внутрішньої структури тривимірного об’єкта
Номер патенту: 78568
Опубліковано: 10.04.2007
Автори: Сергієнко Іван Васильович, Литвин Олег Миколайович, Удовиченко Володимир Миколайович, Межуєв Віталій Іванович, Литвин Олег Олегович
МПК: G01N 23/22
Мітки: структури, спосіб, внутрішньої, об'єкта, тривимірного, відновлення
Формула / Реферат:
Спосіб відновлення внутрішньої структури тривимірного об'єкта, що передбачає опромінення об'єкта в різних напрямах за допомогою джерела проникаючого опромінення, отримання знімків як результату такого опромінення, який відрізняється тим, що опромінення об'єкта виконують у двох взаємно перпендикулярних напрямках, отримані два знімки перетворюють у електронний вигляд, наприклад у файли bmp-формату, на основі яких отримують функціональні...
Спосіб отримання зображення внутрішньої структури об’єкта з використанням рентгенівського випромінювання та пристрій для його здійснення
Номер патенту: 57176
Опубліковано: 16.06.2003
Автор: Кумахов Мурадін Абубекірович
МПК: G01N 23/22, G21K 1/00, A61B 6/00, A61B 6/03, G01T 1/00, G21K 1/02, G21K 5/02
Мітки: зображення, рентгенівського, отримання, випромінювання, здійснення, спосіб, використанням, об'єкта, пристрій, внутрішньої, структури
Формула / Реферат:
1. Спосіб одержання зображення внутрішньої структури об'єкта, при якому діють на об'єкт рентгенівським випромінюванням і використовують для одержання інформації про густину речовини об'єкта вихідні сигнали одного чи кількох детекторів випромінювання, який відрізняється тим, що рентгенівське випромінювання концентрують у зоні, що включає точку (4), до якої відносять поточні результати вимірювань, розташовану всередині досліджуваної області (7)...
Спосіб відновлення кровотоку у басейні внутрішньої сонної артерії
Номер патенту: 58831
Опубліковано: 15.08.2003
Автори: Літвінова Наталія Юріївна, Мішалов Володимир Григорович, Селюк Віктор Михайлович, Кошевський Юрій Іванович, Черняк Віктор Анатолійович
МПК: A61B 17/11, A61B 17/04
Мітки: спосіб, кровотоку, відновлення, басейні, сонної, внутрішньої, артерії
Формула / Реферат:
Спосіб відновлення кровотоку у басейні внутрішньої сонної артерії, що включає виділення загальної, зовнішньої та внутрішньої сонних артерій стандартним доступом, оцінку ступеня і довжини оклюзії, ступеня та конфігурації звивистості, проведення після припинення кровотоку в каротидному басейні поздовжньої артеріотомії внутрішньої сонної артерії і ендартеректомії та накладання судинного шва між внутрішньою і загальною сонними артеріями, який...
Спосіб відновлення кровотоку у басейні внутрішньої сонної артерії
Номер патенту: 38875
Опубліковано: 15.05.2001
Автори: Мішалов Володимир Григорович, Черняк Віктор Анатолійович, Селюк Віктор Михайлович, Літвінова Наталія Юріївна
МПК: A61B 17/00
Мітки: артерії, сонної, відновлення, спосіб, внутрішньої, кровотоку, басейні
Формула / Реферат:
Спосіб відновлення кровотоку у басейні внутрішньої сонної артерії, який передбачає виділення загальної, зовнішньої та внутрішньої сонних артерій стандартним доступом, оцінку ступеня і довжини оклюзії, який відрізняється тим, що додатково з того ж доступу виділяють гілку зовнішньої сонної артерії достатньої довжини та діаметра (наприклад, верхню щитовидну артерію до місця її входження у щитовидну залозу), цю гілку дистально пересікають,...
Спосіб одночасного відновлення кровотоку у басейні внутрішньої сонної та хребетної артерій
Номер патенту: 59850
Опубліковано: 15.09.2003
Автори: Літвінова Наталія Юріївна, Селюк Віктор Михайлович, Кошевський Юрій Іванович, Черняк Віктор Анатолійович, Мішалов Володимир Григорович
МПК: A61B 17/00
Мітки: одночасного, хребетної, басейні, кровотоку, відновлення, спосіб, артерій, внутрішньої, сонної
Формула / Реферат:
Спосіб одночасного відновлення кровотоку у басейні внутрішньої сонної та хребетної артерій, що включає виділення загальної, зовнішньої та внутрішньої сонних, хребетної, підключичної артерій стандартним доступом з пересіканням медіальної ніжки кивального м'яза, оцінку ступеня і довжини оклюзії внутрішньої сонної та хребетної артерій, повздовжню артеріотомію внутрішньої сонної артерії та ендартеректомію з внутрішньої сонної артерії, який...
Попередній патент: Спосіб відновлення внутрішньої структури тривимірного об’єкта
Наступний патент: Верстатний пристрій переміщення
Випадковий патент: Відмовостійкий інерціально-супутниковий автоматизований навігаційний комплекс