Лінійний електродвигун зворотно-поступального руху
Номер патенту: 79418
Опубліковано: 11.06.2007
Автори: Богаєнко Микола Володимирович, Голуб Володимир Павлович, Голенков Геннадій Михайлович, Павленко Петро Володимирович, Попков Володимир Сергійович
Формула / Реферат
Лінійний електродвигун зворотно-поступального руху, який має первинний елемент, виконаний у вигляді ряду котушок, і магнітопровід, які розміщені в корпусі, рухомий елемент, розташований всередині первинного елементу, пружні елементи, які зв'язують первинний і рухомий елементи, який відрізняється тим, що суміжні котушки, встановлені в магнітопровід, мають протилежний напрям струму, магнітопровід виконаний у вигляді навитого поверх котушок шару із феромагнітного дроту або стрічки, рухомий елемент має магнітом'які полюси, кількість яких дорівнює числу котушок, між полюсами розташовані постійні магніти, які мають однакову полярність відносно полюсів, при цьому осі відповідних полюсів і котушок співпадають.
Текст
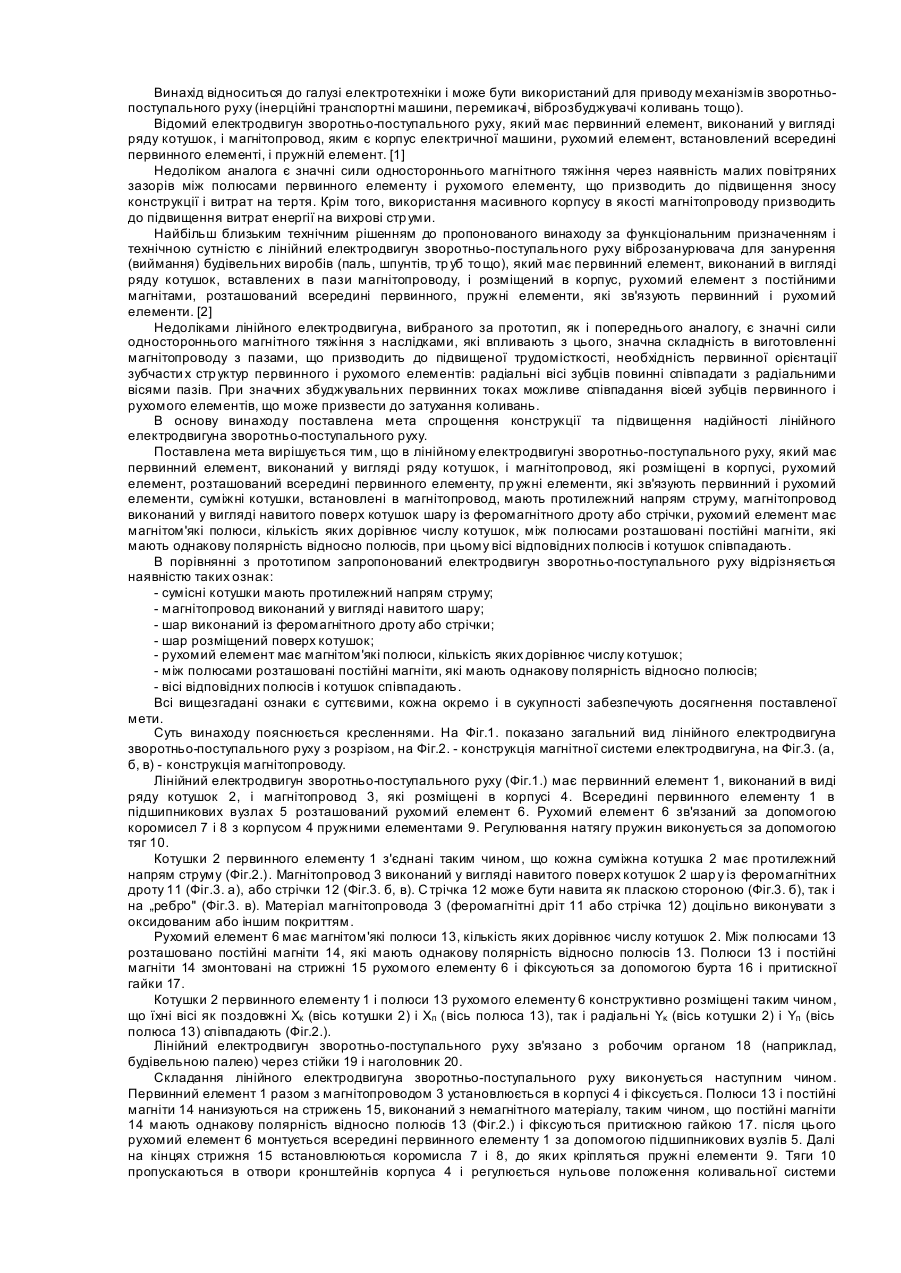
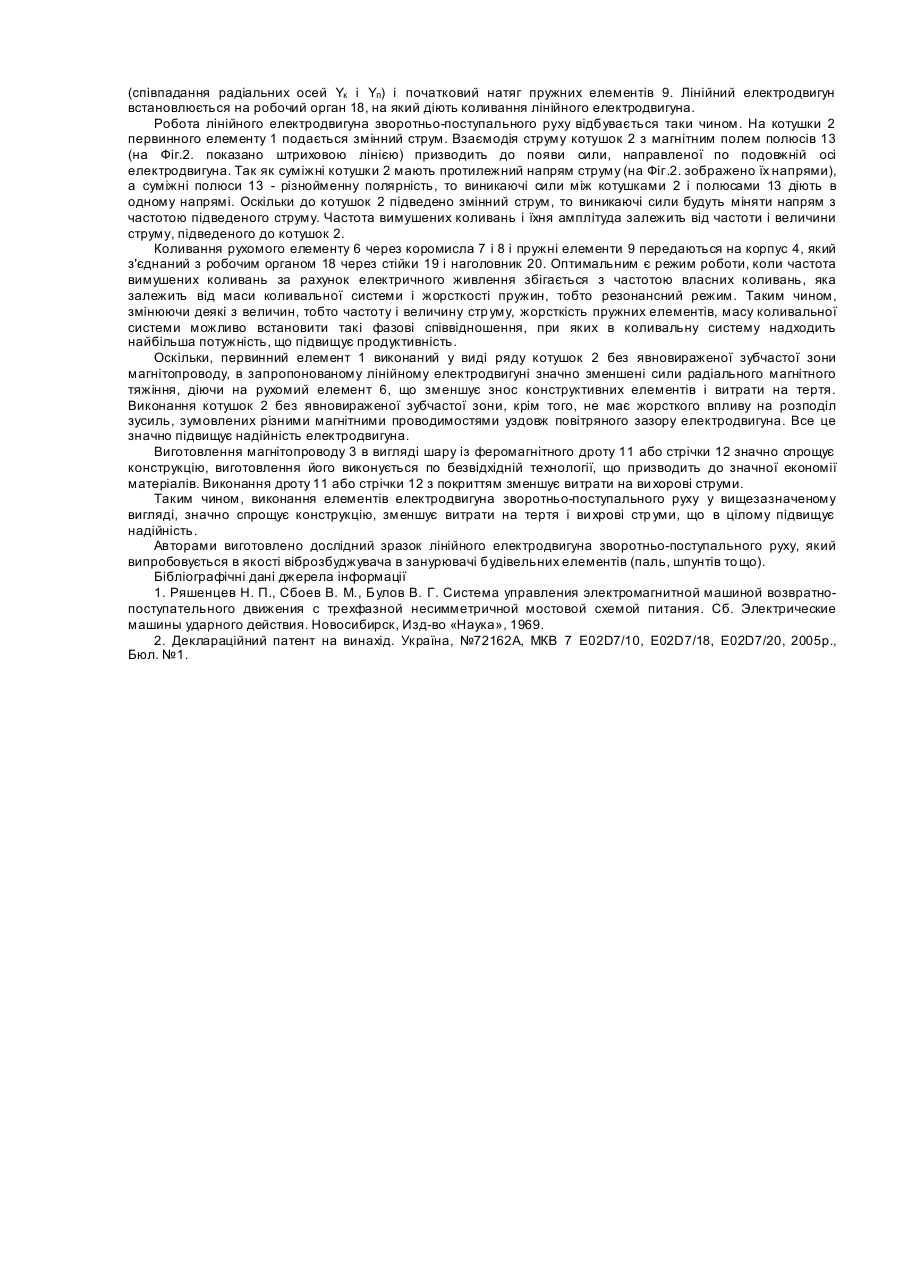
Винахід відноситься до галузі електротехніки і може бути використаний для приводу механізмів зворотньопоступального руху (інерційні транспортні машини, перемикачі, віброзбуджувачі коливань тощо). Відомий електродвигун зворотньо-поступального руху, який має первинний елемент, виконаний у вигляді ряду котушок, і магнітопровод, яким є корпус електричної машини, рухомий елемент, встановлений всередині первинного елементі, і пружній елемент. [1] Недоліком аналога є значні сили одностороннього магнітного тяжіння через наявність малих повітряних зазорів між полюсами первинного елементу і рухомого елементу, що призводить до підвищення зносу конструкції і витрат на тертя. Крім того, використання масивного корпусу в якості магнітопроводу призводить до підвищення витрат енергії на вихрові стр уми. Найбільш близьким технічним рішенням до пропонованого винаходу за функціональним призначенням і технічною сутністю є лінійний електродвигун зворотньо-поступального руху віброзанурювача для занурення (виймання) будівельних виробів (паль, шпунтів, тр уб то що), який має первинний елемент, виконаний в вигляді ряду котушок, вставлених в пази магнітопроводу, і розміщений в корпус, рухомий елемент з постійними магнітами, розташований всередині первинного, пружні елементи, які зв'язують первинний і рухомий елементи. [2] Недоліками лінійного електродвигуна, вибраного за прототип, як і попереднього аналогу, є значні сили одностороннього магнітного тяжіння з наслідками, які впливають з цього, значна складність в виготовленні магнітопроводу з пазами, що призводить до підвищеної трудомісткості, необхідність первинної орієнтації зубчасти х стр уктур первинного і рухомого елементів: радіальні вісі зубців повинні співпадати з радіальними вісями пазів. При значних збуджувальних первинних токах можливе співпадання вісей зубців первинного і рухомого елементів, що може призвести до затухання коливань. В основу винаходу поставлена мета спрощення конструкції та підвищення надійності лінійного електродвигуна зворотньо-поступального руху. Поставлена мета вирішується тим, що в лінійному електродвигуні зворотньо-поступального руху, який має первинний елемент, виконаний у вигляді ряду котушок, і магнітопровод, які розміщені в корпусі, рухомий елемент, розташований всередині первинного елементу, пр ужні елементи, які зв'язують первинний і рухомий елементи, суміжні котушки, встановлені в магнітопровод, мають протилежний напрям струму, магнітопровод виконаний у вигляді навитого поверх котушок шару із феромагнітного дроту або стрічки, рухомий елемент має магнітом'які полюси, кількість яких дорівнює числу котушок, між полюсами розташовані постійні магніти, які мають однакову полярність відносно полюсів, при цьому вісі відповідних полюсів і котушок співпадають. В порівнянні з прототипом запропонований електродвигун зворотньо-поступального руху відрізняється наявністю таких ознак: - сумісні котушки мають протилежний напрям струму; - магнітопровод виконаний у вигляді навитого шару; - шар виконаний із феромагнітного дроту або стрічки; - шар розміщений поверх котушок; - рухомий елемент має магнітом'які полюси, кількість яких дорівнює числу котушок; - між полюсами розташовані постійні магніти, які мають однакову полярність відносно полюсів; - вісі відповідних полюсів і котушок співпадають. Всі вищезгадані ознаки є суттєвими, кожна окремо і в сукупності забезпечують досягнення поставленої мети. Суть винаходу пояснюється кресленнями. На Фіг.1. показано загальний вид лінійного електродвигуна зворотньо-поступального руху з розрізом, на Фіг.2. - конструкція магнітної системи електродвигуна, на Фіг.3. (а, б, в) - конструкція магнітопроводу. Лінійний електродвигун зворотньо-поступального руху (Фіг.1.) має первинний елемент 1, виконаний в виді ряду котушок 2, і магнітопровод 3, які розміщені в корпусі 4. Всередині первинного елементу 1 в підшипникових вузлах 5 розташований рухомий елемент 6. Рухомий елемент 6 зв'язаний за допомогою коромисел 7 і 8 з корпусом 4 пружними елементами 9. Регулювання натягу пружин виконується за допомогою тяг 10. Котушки 2 первинного елементу 1 з'єднані таким чином, що кожна суміжна котушка 2 має протилежний напрям струму (Фіг.2.). Магнітопровод 3 виконаний у вигляді навитого поверх котушок 2 шар у із феромагнітних дроту 11 (Фіг.3. а), або стрічки 12 (Фіг.3. б, в). С трічка 12 може бути навита як пласкою стороною (Фіг.3. б), так і на „ребро" (Фіг.3. в). Матеріал магнітопровода 3 (феромагнітні дріт 11 або стрічка 12) доцільно виконувати з оксидованим або іншим покриттям. Рухомий елемент 6 має магнітом'які полюси 13, кількість яких дорівнює числу котушок 2. Між полюсами 13 розташовано постійні магніти 14, які мають однакову полярність відносно полюсів 13. Полюси 13 і постійні магніти 14 змонтовані на стрижні 15 рухомого елементу 6 і фіксуються за допомогою бурта 16 і притискної гайки 17. Котушки 2 первинного елементу 1 і полюси 13 рухомого елементу 6 конструктивно розміщені таким чином, що їхні вісі як поздовжні Хк (вісь котушки 2) і Хп (вісь полюса 13), так і радіальні Υκ (вісь котушки 2) і Υп (вісь полюса 13) співпадають (Фіг.2.). Лінійний електродвигун зворотньо-поступального руху зв'язано з робочим органом 18 (наприклад, будівельною палею) через стійки 19 і наголовник 20. Складання лінійного електродвигуна зворотньо-поступального руху виконується наступним чином. Первинний елемент 1 разом з магнітопроводом 3 установлюється в корпусі 4 і фіксується. Полюси 13 і постійні магніти 14 нанизуються на стрижень 15, виконаний з немагнітного матеріалу, таким чином, що постійні магніти 14 мають однакову полярність відносно полюсів 13 (Фіг.2.) і фіксуються притискною гайкою 17. після цього рухомий елемент 6 монтується всередині первинного елементу 1 за допомогою підшипникових вузлів 5. Далі на кінцях стрижня 15 встановлюються коромисла 7 і 8, до яких кріпляться пружні елементи 9. Тяги 10 пропускаються в отвори кронштейнів корпуса 4 і регулюється нульове положення коливальної системи (співпадання радіальних осей Υк і Υп) і початковий натяг пружних елементів 9. Лінійний електродвигун встановлюється на робочий орган 18, на який діють коливання лінійного електродвигуна. Робота лінійного електродвигуна зворотньо-поступального руху відбувається таки чином. На котушки 2 первинного елементу 1 подається змінний струм. Взаємодія струму котушок 2 з магнітним полем полюсів 13 (на Фіг.2. показано штриховою лінією) призводить до появи сили, направленої по подовжній осі електродвигуна. Так як суміжні котушки 2 мають протилежний напрям струму (на Фіг.2. зображено їх напрями), а суміжні полюси 13 - різнойменну полярність, то виникаючі сили між котушками 2 і полюсами 13 діють в одному напрямі. Оскільки до котушок 2 підведено змінний струм, то виникаючі сили будуть міняти напрям з частотою підведеного струму. Частота вимушених коливань і їхня амплітуда залежить від частоти і величини струму, підведеного до котушок 2. Коливання рухомого елементу 6 через коромисла 7 і 8 і пружні елементи 9 передаються на корпус 4, який з'єднаний з робочим органом 18 через стійки 19 і наголовник 20. Оптимальним є режим роботи, коли частота вимушених коливань за рахунок електричного живлення збігається з частотою власних коливань, яка залежить від маси коливальної системи і жорсткості пружин, тобто резонансний режим. Таким чином, змінюючи деякі з величин, тобто частоту і величину стр уму, жорсткість пружних елементів, масу коливальної системи можливо встановити такі фазові співвідношення, при яких в коливальну систему надходить найбільша потужність, що підвищує продуктивність. Оскільки, первинний елемент 1 виконаний у виді ряду котушок 2 без явновираженої зубчастої зони магнітопроводу, в запропонованому лінійному електродвигуні значно зменшені сили радіального магнітного тяжіння, діючи на рухомий елемент 6, що зменшує знос конструктивних елементів і витрати на тертя. Виконання котушок 2 без явновираженої зубчастої зони, крім того, не має жорсткого впливу на розподіл зусиль, зумовлених різними магнітними проводимостями уздовж повітряного зазору електродвигуна. Все це значно підвищує надійність електродвигуна. Виготовлення магнітопроводу 3 в вигляді шару із феромагнітного дроту 11 або стрічки 12 значно спрощує конструкцію, виготовлення його виконується по безвідхідній технології, що призводить до значної економії матеріалів. Виконання дроту 11 або стрічки 12 з покриттям зменшує витрати на ви хорові струми. Таким чином, виконання елементів електродвигуна зворотньо-поступального руху у вищезазначеному вигляді, значно спрощує конструкцію, зменшує витрати на тертя і ви хрові стр уми, що в цілому підвищує надійність. Авторами виготовлено дослідний зразок лінійного електродвигуна зворотньо-поступального руху, який випробовується в якості віброзбуджувача в занурювачі будівельних елементів (паль, шпунтів то що). Бібліографічні дані джерела інформації 1. Ряшенцев Н. П., Сбоев В. Μ., Булов В. Г. Система управления электромагнитной машиной возвратнопоступательного движения с трехфазной несимметричной мостовой схемой питания. Сб. Электрические машины ударного действия. Новосибирск, Изд-во «Наука», 1969. 2. Деклараційний патент на винахід. Україна, №72162А, МКВ 7 E02D7/10, E02D7/18, E02D7/20, 2005р., Бюл. №1.
ДивитисяДодаткова інформація
Назва патенту англійськоюLinear elecric motor of reciprocating movement
Автори англійськоюBohaienko Mykola Volodymyrovych, Holenkov Hennadii Mykhailovych, Holub Volodymyr Pavlovych, Popkov Volodymyr Serhiiovych, Popkov Volodymyr Serhiiovychch
Назва патенту російськоюЛинейный электродвигатель возвратно- поступательного движения
Автори російськоюБогаенко Николай Владимирович, Голенков Геннадий Михайлович, Голуб Владимир Павлович, Попков Владимир Сергеевич
МПК / Мітки
МПК: H02K 33/00
Мітки: електродвигун, лінійний, зворотно-поступального, руху
Код посилання
<a href="https://ua.patents.su/3-79418-linijjnijj-elektrodvigun-zvorotno-postupalnogo-rukhu.html" target="_blank" rel="follow" title="База патентів України">Лінійний електродвигун зворотно-поступального руху</a>
Електродвигун зворотно-поступального руху
Номер патенту: 23757
Опубліковано: 11.06.2007
Автори: Богаєнко Микола Володимирович, Голенков Геннадій Михайлович, Попков Володимир Сергійович, Богаєнко Євген Миколайович, Веремієнко Андрій Володимирович
МПК: H02K 41/025
Мітки: руху, електродвигун, зворотно-поступального
Формула / Реферат:
Електродвигун зворотно-поступального руху, який має індуктор і вторинний елемент, що має феромагнітний стрижень, вторинну обмотку, розміщену між феромагнітними шайбами, який відрізняється тим, що вторинна обмотка виконана у вигляді низки концентричних скупчених котушок, з'єднаних з виносним формувачем параметрів вторинної обмотки і керуючих сигналів, феромагнітний стрижень на зовнішній поверхні має подовжні пази, кількість яких дорівнює числу...
Індуктор електродвигуна зворотно-поступального руху
Номер патенту: 14526
Опубліковано: 15.05.2006
Автори: Голенков Геннадій Михайлович, Богаєнко Микола Володимирович, Голуб Володимир Павлович, Попков Володимир Сергійович, Павленко Петро Володимирович
МПК: H02K 41/025
Мітки: електродвигуна, зворотно-поступального, індуктор, руху
Формула / Реферат:
Індуктор електродвигуна зворотно-поступального руху, що містить первинний елемент у вигляді ряду котушок і магнітопровід, які розміщені в корпусі, який відрізняється тим, щο первинний елемент і магнітопровід змонтовані у маточині, виконаній з ізоляційного матеріалу, яка має подовжню трубу з фланцями, з'єднаними центруючими у корпусі планками, рівномірно встановленими на їх зовнішніх поверхнях, між фланцями рівномірно розміщені внутрішні...
Двигун зворотно-поступального руху
Номер патенту: 3168
Опубліковано: 15.10.2004
Автори: Цодік Ігор Абрамович, Поляков Олег Володимирович
МПК: H02K 33/00
Мітки: руху, зворотно-поступального, двигун
Формула / Реферат:
Двигун зворотно-поступального руху, що містить нерухомий статор і рухомий якір з магнітопроводами, які мають різну ширину полюсів та обмотки, по одній з яких протікає постійний, а по іншій - змінний струм, який відрізняється тим, що статор містить корпус з розміщеними усередині нього полюсами і котушками кільцевої форми, які розташовані один за одним, із зміненими знаками потенціалу, а якір має остов, на якому встановлені один за одним...
Індуктор електродвигуна зворотно-поступального руху
Номер патенту: 79139
Опубліковано: 25.05.2007
Автори: Павленко Петро Володимирович, Голуб Володимир Павлович, Запорожець Олександр Леонідович, Богаєнко Микола Володимирович, Попков Володимир Сергійович, Голенков Геннадій Михайлович
МПК: H02K 41/02, H02K 41/025
Мітки: зворотно-поступального, електродвигуна, руху, індуктор
Формула / Реферат:
Індуктор електродвигуна зворотно-поступального руху, який має активний шар, виконаний у вигляді набору модулів, кожен з яких складається з котушки та феромагнітного елементу, при цьому набір модулів формує магнітний ланцюг індуктора: спинка магнітопроводу – паз – зубці; елементи кріплення активного шару, корпус індуктора, підшипникові вузли, який відрізняється тим, що феромагнітний елемент модуля виконаний у вигляді двох шайб з зовнішніми...
Індуктор електродвигуна зворотно-поступального руху
Номер патенту: 9270
Опубліковано: 15.09.2005
Автори: Голуб Володимир Павлович, Павленко Петро Володимирович, Богаєнко Микола Володимирович, Голенков Геннадій Михайлович, Запорожець Олександр Леонідович, Попков Володимир Сергійович
МПК: H02K 19/02, H02K 41/025
Мітки: індуктор, руху, зворотно-поступального, електродвигуна
Формула / Реферат:
Індуктор електродвигуна зворотно-поступального руху, який має активний шар, виконаний в вигляді набору модулів, елементи кріплення активного шару, корпус індуктора, підшипникові вузли, який відрізняється тим, що феромагнітний елемент модуля виконаний в вигляді двох шайб з кільцевими виступами, товщина кожної рівна половині товщини зубця магнітопроводу, висота кожного кільцевого виступу, направленого один до другого, дорівнює половині ширини...
Попередній патент: Спосіб ремонту протяжної лінійної ділянки діючого трубопроводу
Наступний патент: Біологічно активна харчова добавка “альфа+омега”
Випадковий патент: Роторно-пульсаційний апарат