Спосіб визначення глибини і напрямку проходження підземного трубопроводу
Номер патенту: 88698
Опубліковано: 10.11.2009
Формула / Реферат
Спосіб визначення глибини і напрямку проходження підземного трубопроводу, який передбачає під'єднання до стінки трубопроводу генератора змінного струму і використання вимірювальної системи, яка складається з двох систем магнітних антен, розміщених на визначеній відстані одна від одної, які визначають напруженість магнітного поля над трубопроводом, який відрізняється тим, що вимірювальну систему, яка містить п'ять магнітних антен, розміщують над трубопроводом під довільним кутом до осі трубопроводу, причому першу систему магнітних антен складають з трьох антен, а другу - з двох антен, які розміщують у визначених площинах щодо поверхні землі та напрямках відносно осі вимірювальної системи, визначають значення кута між віссю трубопроводу і віссю вимірювальної системи та проводять порівняння фаз сигналів, отриманих з антен, які розміщені в площині, перпендикулярній до осі вимірювальної системи, після чого на основі отриманої різниці фаз сигналів обчислюють глибину і напрям проходження підземного трубопроводу.
Текст
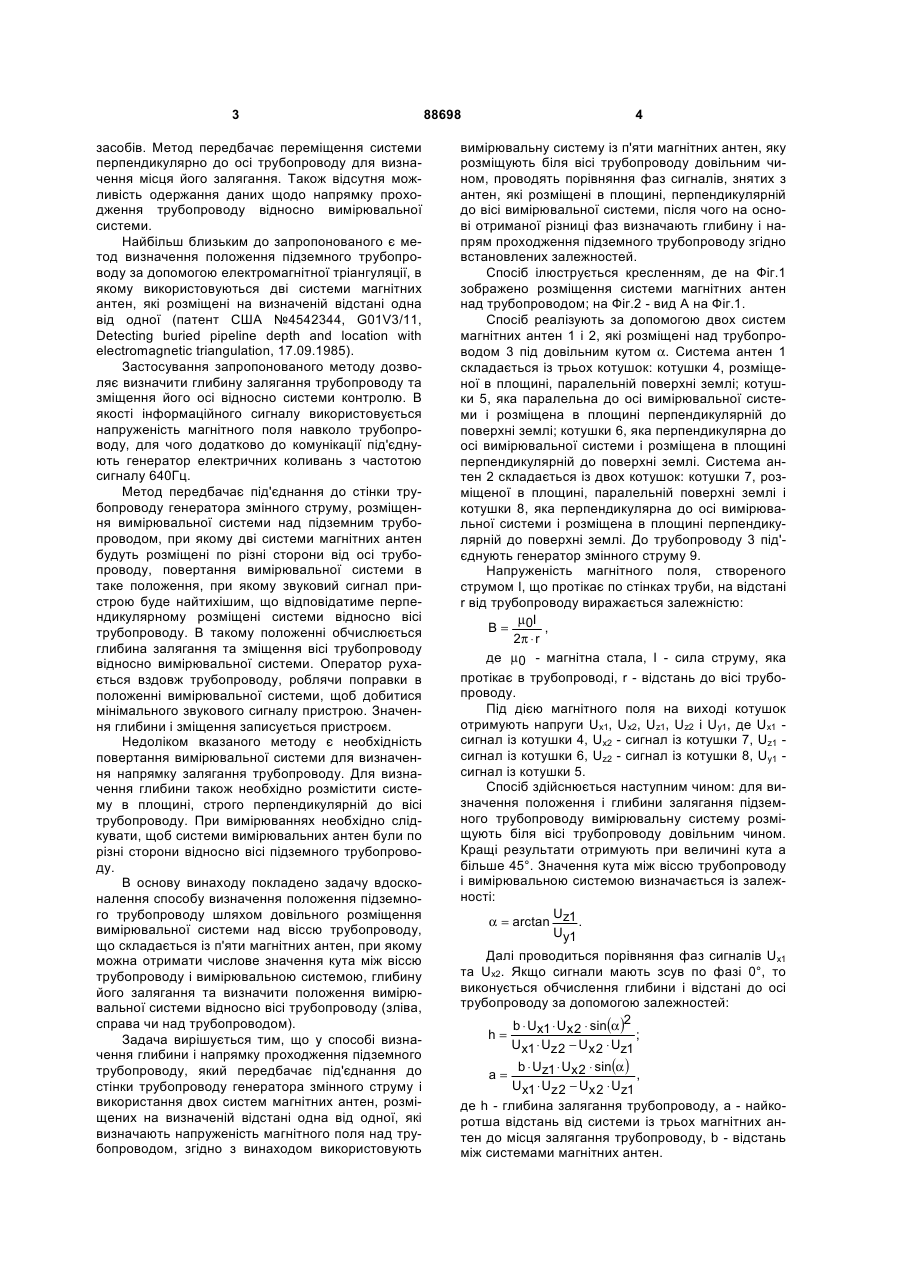
Спосіб визначення глибини і напрямку проходження підземного трубопроводу, який передбачає під'єднання до стінки трубопроводу генерато 3 засобів. Метод передбачає переміщення системи перпендикулярно до осі трубопроводу для визначення місця його залягання. Також відсутня можливість одержання даних щодо напрямку проходження трубопроводу відносно вимірювальної системи. Найбільш близьким до запропонованого є метод визначення положення підземного трубопроводу за допомогою електромагнітної тріангуляції, в якому використовуються дві системи магнітних антен, які розміщені на визначеній відстані одна від одної (патент США №4542344, G01V3/11, Detecting buried pipeline depth and location with electromagnetic triangulation, 17.09.1985). Застосування запропонованого методу дозволяє визначити глибину залягання трубопроводу та зміщення його осі відносно системи контролю. В якості інформаційного сигналу використовується напруженість магнітного поля навколо трубопроводу, для чого додатково до комунікації під'єднують генератор електричних коливань з частотою сигналу 640Гц. Метод передбачає під'єднання до стінки трубопроводу генератора змінного струму, розміщення вимірювальної системи над підземним трубопроводом, при якому дві системи магнітних антен будуть розміщені по різні сторони від осі трубопроводу, повертання вимірювальної системи в таке положення, при якому звуковий сигнал пристрою буде найтихішим, що відповідатиме перпендикулярному розміщені системи відносно вісі трубопроводу. В такому положенні обчислюється глибина залягання та зміщення вісі трубопроводу відносно вимірювальної системи. Оператор рухається вздовж трубопроводу, роблячи поправки в положенні вимірювальної системи, щоб добитися мінімального звукового сигналу пристрою. Значення глибини і зміщення записується пристроєм. Недоліком вказаного методу є необхідність повертання вимірювальної системи для визначення напрямку залягання трубопроводу. Для визначення глибини також необхідно розмістити систему в площині, строго перпендикулярній до вісі трубопроводу. При вимірюваннях необхідно слідкувати, щоб системи вимірювальних антен були по різні сторони відносно вісі підземного трубопроводу. В основу винаходу покладено задачу вдосконалення способу визначення положення підземного трубопроводу шляхом довільного розміщення вимірювальної системи над віссю трубопроводу, що складається із п'яти магнітних антен, при якому можна отримати числове значення кута між віссю трубопроводу і вимірювальною системою, глибину його залягання та визначити положення вимірювальної системи відносно вісі трубопроводу (зліва, справа чи над трубопроводом). Задача вирішується тим, що у способі визначення глибини і напрямку проходження підземного трубопроводу, який передбачає під'єднання до стінки трубопроводу генератора змінного струму і використання двох систем магнітних антен, розміщених на визначеній відстані одна від одної, які визначають напруженість магнітного поля над трубопроводом, згідно з винаходом використовують 88698 4 вимірювальну систему із п'яти магнітних антен, яку розміщують біля вісі трубопроводу довільним чином, проводять порівняння фаз сигналів, знятих з антен, які розміщені в площині, перпендикулярній до вісі вимірювальної системи, після чого на основі отриманої різниці фаз визначають глибину і напрям проходження підземного трубопроводу згідно встановлених залежностей. Спосіб ілюструється кресленням, де на Фіг.1 зображено розміщення системи магнітних антен над трубопроводом; на Фіг.2 - вид А на Фіг.1. Спосіб реалізують за допомогою двох систем магнітних антен 1 і 2, які розміщені над трубопроводом 3 під довільним кутом α. Система антен 1 складається із трьох котушок: котушки 4, розміщеної в площині, паралельній поверхні землі; котушки 5, яка паралельна до осі вимірювальної системи і розміщена в площині перпендикулярній до поверхні землі; котушки 6, яка перпендикулярна до осі вимірювальної системи і розміщена в площині перпендикулярній до поверхні землі. Система антен 2 складається із двох котушок: котушки 7, розміщеної в площині, паралельній поверхні землі і котушки 8, яка перпендикулярна до осі вимірювальної системи і розміщена в площині перпендикулярній до поверхні землі. До трубопроводу 3 під'єднують генератор змінного струму 9. Напруженість магнітного поля, створеного струмом І, що протікає по стінках труби, на відстані r від трубопроводу виражається залежністю: µ I B= 0 , 2π ⋅ r де µ0 - магнітна стала, І - сила струму, яка протікає в трубопроводі, r - відстань до вісі трубопроводу. Під дією магнітного поля на виході котушок отримують напруги Ux1, Ux2, Uz1, Uz2 і Uy1, де Ux1 сигнал із котушки 4, Ux2 - сигнал із котушки 7, Uz1 сигнал із котушки 6, Uz2 - сигнал із котушки 8, Uy1 сигнал із котушки 5. Спосіб здійснюється наступним чином: для визначення положення і глибини залягання підземного трубопроводу вимірювальну систему розміщують біля вісі трубопроводу довільним чином. Кращі результати отримують при величині кута а більше 45°. Значення кута між віссю трубопроводу і вимірювальною системою визначається із залежності: U α = arctan z1 . Uy1 Далі проводиться порівняння фаз сигналів Ux1 та Ux2. Якщо сигнали мають зсув по фазі 0°, то виконується обчислення глибини і відстані до осі трубопроводу за допомогою залежностей: b ⋅ Ux1 ⋅ Ux 2 ⋅ sin(α )2 h= ; Ux1 ⋅ Uz2 − Ux 2 ⋅ Uz1 b ⋅ Uz1 ⋅ Ux 2 ⋅ sin(α ) , a= Ux1 ⋅ Uz2 − Ux 2 ⋅ Uz1 де h - глибина залягання трубопроводу, а - найкоротша відстань від системи із трьох магнітних антен до місця залягання трубопроводу, b - відстань між системами магнітних антен. 5 88698 Додатній знак результатів свідчить про розміщення системи справа від осі трубопроводу, а від'ємний - про розміщення системи зліва. У випадку, якщо сигнали мають зсув по фазі 180°, то обчислення глибини і відстані до осі трубопроводу проводять за залежностями: b ⋅ Ux1 ⋅ Ux 2 ⋅ sin(α )2 h= ; Ux1 ⋅ Uz2 + Ux 2 ⋅ Uz1 b ⋅ Uz1 ⋅ Ux 2 ⋅ sin(α ) . a= Ux1 ⋅ Uz2 + Ux 2 ⋅ Uz1 Наприклад при використанні систем антен, які розміщені на відстані b=1м одна від одної будуть отримані значення напруг Ux1=0,7346В, Ux2=1,1937В, Uz1=1,0851В, Uz2=1,1845В і Uy1=0,1913В та зсув фази між сигналами Ux1 і Ux2 становитиме 0° із приведених залежностей одержуємо такий результат: кут між віссю трубопроводу і вимірювальною системою α=80,0017°, глибина Комп’ютерна верстка А. Рябко 6 залягання трубопроводу h=-2.0004м, відстань від вимірювальної системи до трубопроводу а=3,0004м. Знак "-" в отриманих значеннях свідчить про розміщення вимірювальної системи зліва вісі трубопроводу. Значення h і а беруться по модулю, тобто h=2,0004м, а=3,0004м. Таким чином застосування запропонованого способу дозволить досягнути такого технічного результату від його використання, а саме: визначати глибину та напрям залягання підземного трубопроводу при довільному розміщенні вимірювальної системи, отримати числове значення кута між віссю трубопроводу і вимірювальною системою та визначити положення вимірювальної системи відносно вісі трубопроводу (зліва, справа чи над трубопроводом). Це підвищить точність визначення глибини та напряму залягання підземного трубопроводу, а також швидкість діагностики. Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determination of depth and direction of passage of undergroung pipeline
Автори англійськоюKostiv Bohdan Volodymyrovych, Kisil Ihor Stepanovych
Назва патенту російськоюСпособ определения глубины и направления прохождения подземного трубопровода
Автори російськоюКостив Богдан Владимирович, Кисиль Игорь Степанович
МПК / Мітки
МПК: G01V 3/00
Мітки: підземного, визначення, проходження, спосіб, глибини, напрямку, трубопроводу
Код посилання
<a href="https://ua.patents.su/3-88698-sposib-viznachennya-glibini-i-napryamku-prokhodzhennya-pidzemnogo-truboprovodu.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення глибини і напрямку проходження підземного трубопроводу</a>
Спосіб визначення рівнодійної поздовжніх дотичних зусиль на поверхні підземного трубопроводу
Номер патенту: 40950
Опубліковано: 27.04.2009
Автор: Светницький Сергій Олексійович
МПК: G01C 3/00
Мітки: дотичних, поздовжніх, рівнодійної, поверхні, визначення, зусиль, трубопроводу, підземного, спосіб
Формула / Реферат:
Спосіб визначення рівнодійної поздовжніх дотичних зусиль на поверхні підземного трубопроводу, що включає визначення горизонтальних деформацій земної поверхні, який відрізняється тим, що шляхом систематичного вимірювання горизонтальних поздовжніх переміщень фіксованих перерізів трубопроводу відносно спеціальних реперів визначають переміщення трубопроводу як різницю виміряних горизонтальних переміщень земної поверхні і переміщень трубопроводу...
Спосіб визначення опору грунту на трасі підземного трубопроводу
Номер патенту: 42313
Опубліковано: 15.10.2001
Автор: Джала Роман Михайлович
МПК: G01R 27/16, C23F 13/00
Мітки: підземного, опору, трубопроводу, трасі, грунту, спосіб, визначення
Формула / Реферат:
1. Спосіб визначення опору грунту на трасі підземного трубопроводу, за яким один контакт джерела струму підключають до заземлення, міряють напругу U між двома електродами, встановленими на поверхні грунту, питомий опір грунту обчислюють за результатами вимірів, який відрізняється тим, що другий контакт джерела струму підключають до труби, визначають проекцію осі труби на поверхню землі і глибину h залягання труби, встановлюють перший...
Спосіб визначення коефіцієнту заникання захисного струму на ділянці підземного трубопроводу
Номер патенту: 20227
Опубліковано: 15.07.1997
Автори: Джала Роман Михайлович, Дікмарова Людмила Петрівна
МПК: G01R 19/00
Мітки: спосіб, струму, визначення, ділянці, коефіцієнту, захисного, заникання, трубопроводу, підземного
Формула / Реферат:
1. Спосіб визначення коефіцієнту замикання захисного струму на ділянці підземного трубопроводу, згідно з яким шляхом вимірювань напруженості магнітного поля, створеного змінним з першою частотою f1 струмом над трубопроводом, безконтактним методом вимірюють величину змінного струму, що протікає по трубопроводу, який відрізняється тим, що на початку ділянки додатково безконтактним методом вимірюють величину змінного струму на другій частоті...
Пристрій для санації підземного металевого трубопроводу
Номер патенту: 15904
Опубліковано: 17.07.2006
Автори: Лялюк Олександр Миколайович, Ратушняк Георгій Сергійович, Глубокий Віталій Васильович
МПК: F16L 58/02
Мітки: пристрій, трубопроводу, металевого, санації, підземного
Формула / Реферат:
Пристрій для санації підземного металевого трубопроводу, що містить трубопровід для транспортування облицювальної речовини, який приєднаний до обертового органа, який відрізняється тим, що в нього введено механізм для очистки внутрішньої поверхні металевого трубопроводу з щітками на кінцях та отворами, які розташовані біля щіток, вертлюг, який з’єднує трубопровід для транспортування в’яжучої полімерної речовини та механізм для очистки...
Пристрій для санації та очищення підземного металевого трубопроводу
Номер патенту: 22066
Опубліковано: 10.04.2007
Автори: Лялюк Олександр Миколайович, Ратушняк Георгій Сергійович, Глубокий Віталій Васильович
МПК: F16L 58/02
Мітки: пристрій, підземного, санації, трубопроводу, металевого, очищення
Формула / Реферат:
Пристрій для санації та очищення підземного металевого трубопроводу, що містить подавальний трубопровід, обертовий орган з тангенціальними отворами для випускання облицювальної речовини, вертлюг, що з'єднує обертовий орган з подавальним трубопроводом, механізм для шліфування внутрішньої поверхні реконструйованого трубопроводу, який відрізняється тим, що додатково містить канал для подачі повітря до подавального трубопроводу, фрезерувальні...
Попередній патент: Спосіб лікування хворих з опіковими ранами
Наступний патент: Кришка підводу
Випадковий патент: Спосіб лікування нікотинової залежності