Система і спосіб внутрішньосмугового модема для передач даних по мережах цифрового бездротового зв’язку
Номер патенту: 95590
Опубліковано: 10.08.2011
Автори: Піч Крістіан, Сграя Крістіан, Гранцов Вольфганг, Франк Георг, Вернер Марк В., Йоеттен Крістоф А., Хуан Пенцзюнь




Формула / Реферат
1. Спосіб синхронізації множини немовних кадрів через мовний кодек, що містить етапи, на яких відбувається:
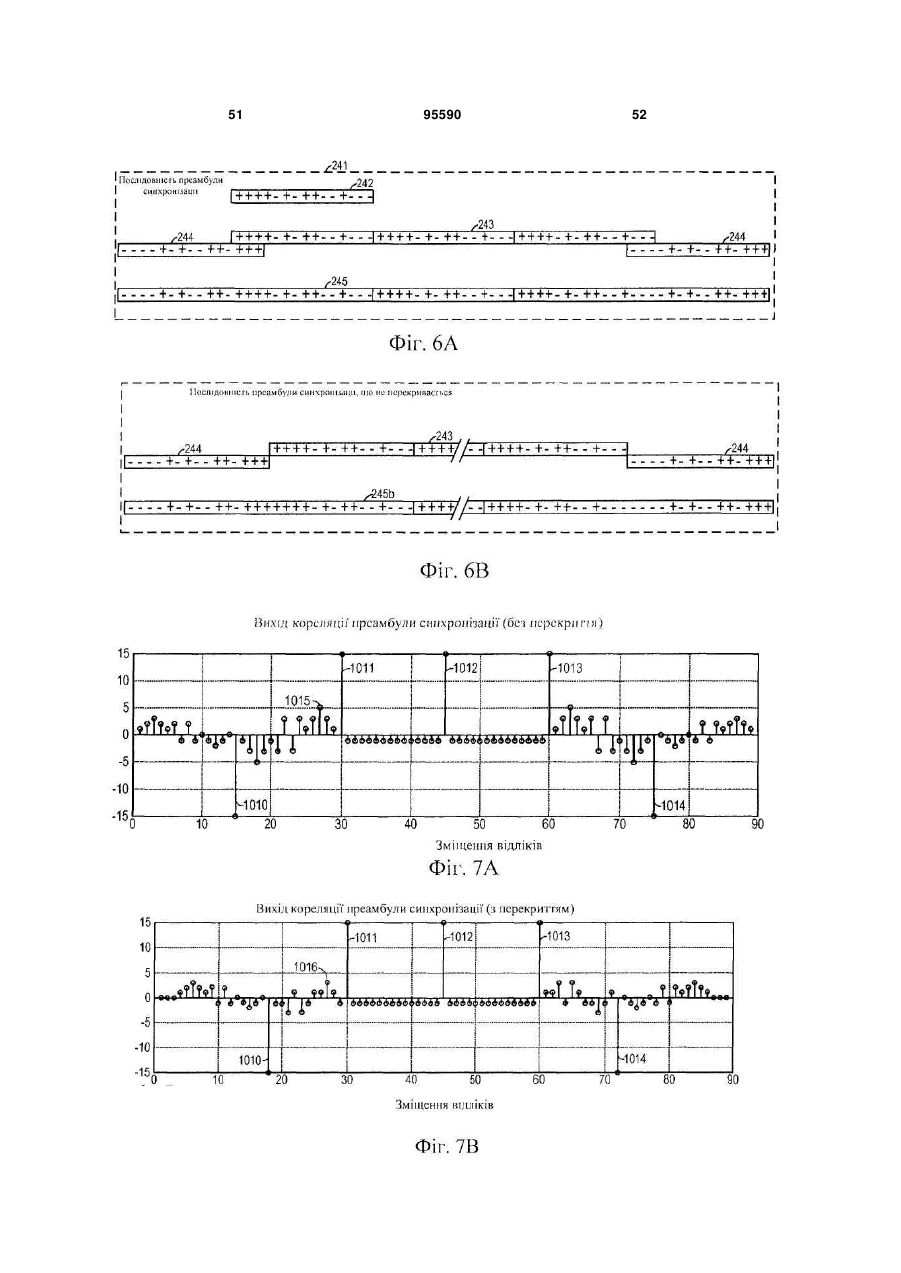
генерація заздалегідь заданої послідовності, використовуючи множину псевдовипадкових шумових послідовностей, причому заздалегідь задана послідовність має шумоподібні характеристики, і причому заздалегідь задана послідовність містить набори бітів для використання при генерації кореляційних піків, які забезпечують заздалегідь задану послідовність стійкістю до помилок в мовних кадрах; і
передача заздалегідь заданої послідовності через мовний кодек,
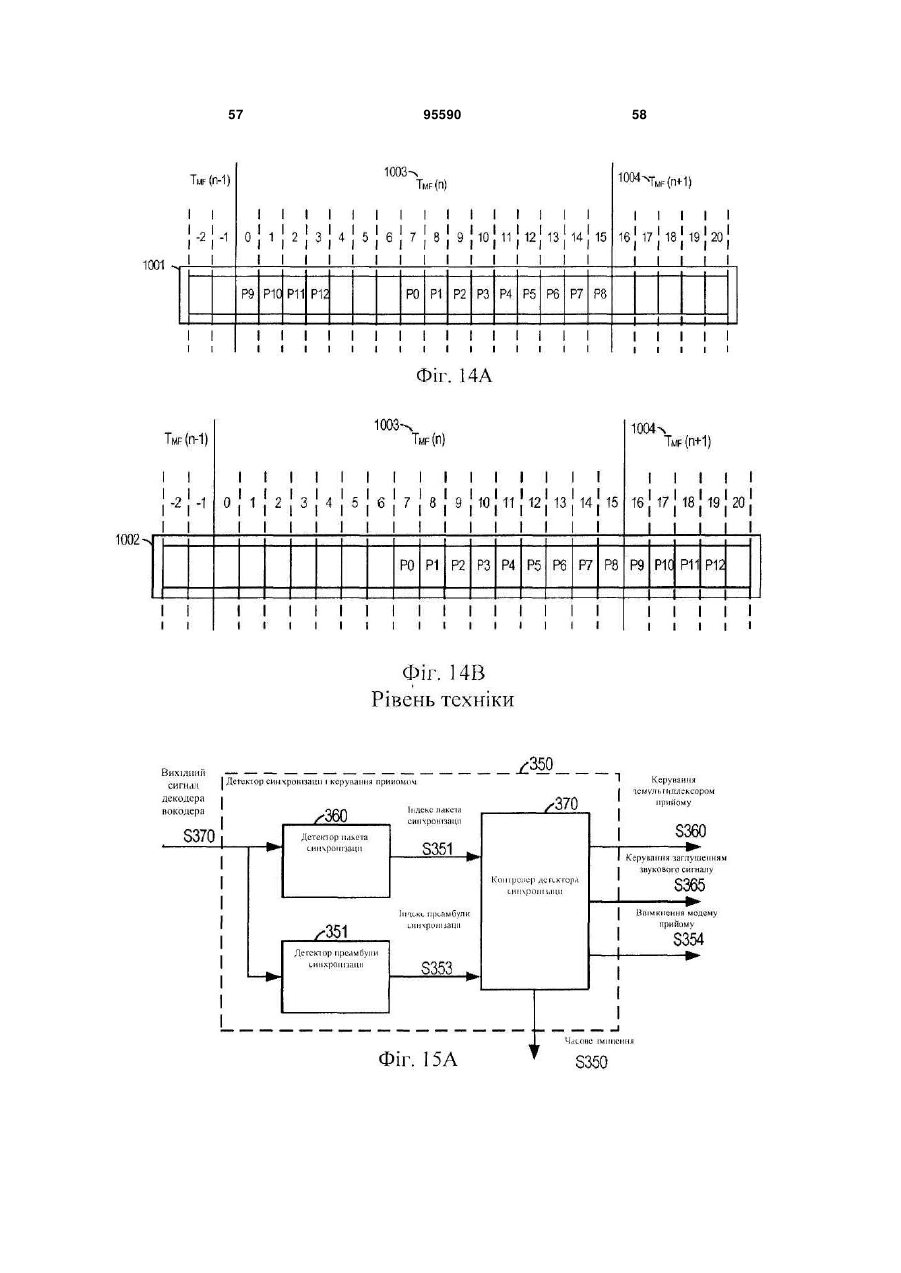
причому заздалегідь задана послідовність використовується як кадрова синхронізація для немовних кадрів,
причому початок меж немовного кадру немовних кадрів залежить щонайменше від відстані від часу зміщення в заздалегідь заданій послідовності до опорного моменту часу.
2. Спосіб за п. 1, в якому заздалегідь задана послідовність є функцією щонайменше однієї з множини псевдовипадкових шумових послідовностей.
3. Спосіб за п. 2, в якому функція складається зі зв'язаної множини псевдовипадкових шумових послідовностей.
4. Спосіб за п. 2, в якому функція складається зі зв'язаної множини псевдовипадкових шумових послідовностей з множиною псевдовипадкових шумових послідовностей, які перекриваються або додаються.
5. Спосіб за п. 1, в якому кожен відлік заздалегідь заданої послідовності відділяється щонайменше одним відліком, що має двійкове значення 0.
6. Спосіб за п. 3, в якому щонайменше одна з псевдовипадкових шумових послідовностей інвертована.
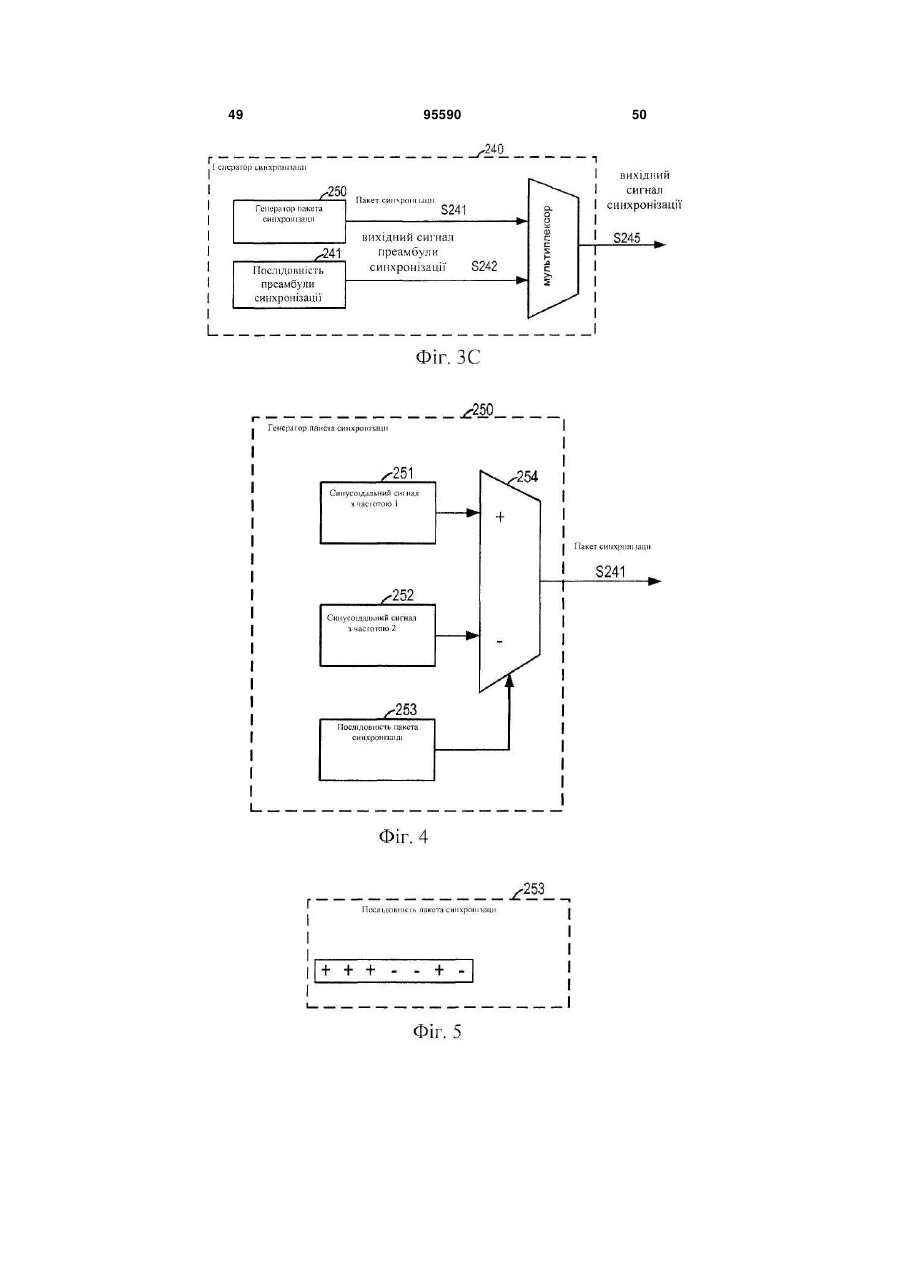
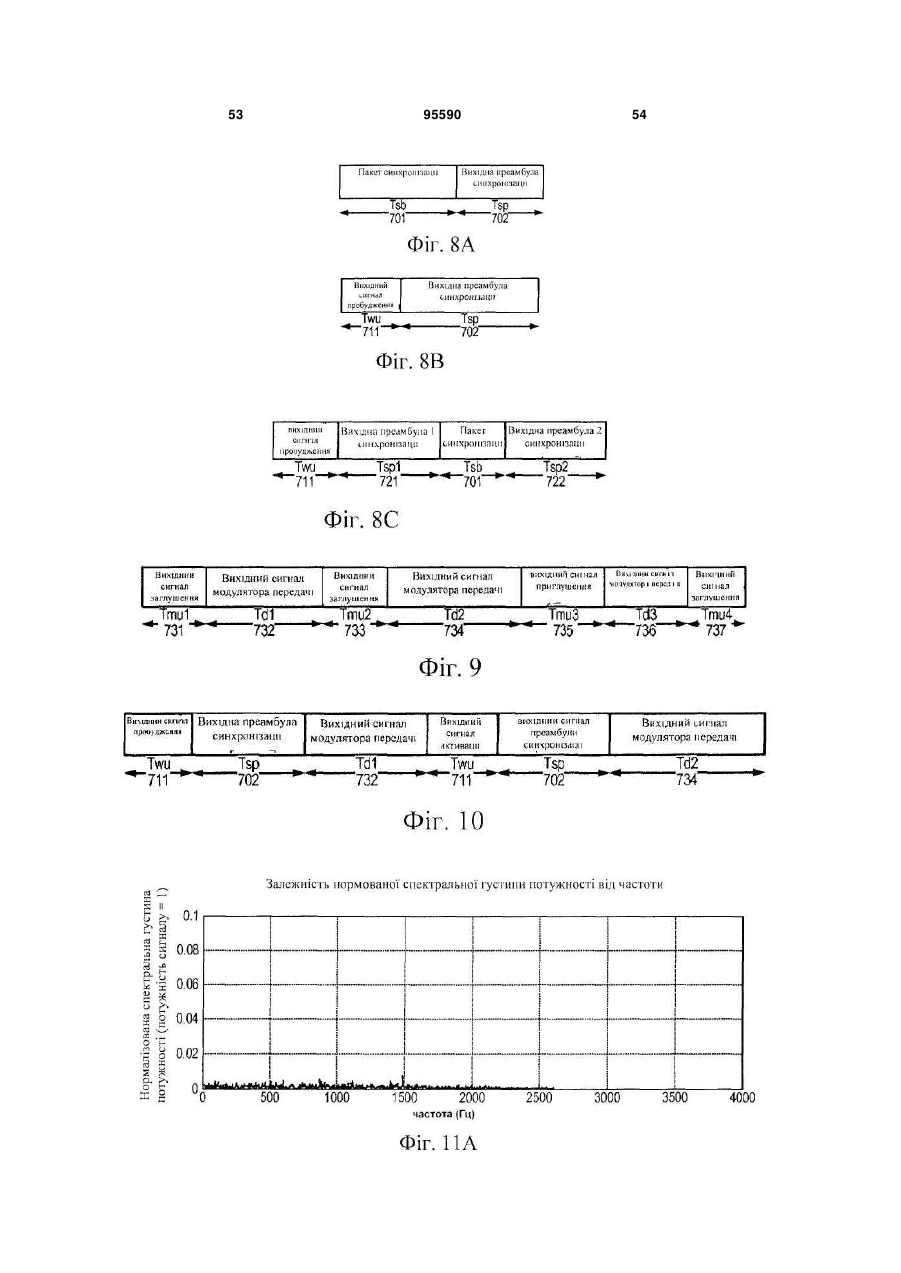
7. Спосіб за п. 1, що додатково містить генерацію пробуджуючого сигналу перед заздалегідь заданою послідовністю для заборони елементу кодера вокодера переходити в неактивний стан.
8. Спосіб за п. 7, в якому пробуджуючий сигнал є синусоїдальним сигналом.
9. Спосіб за п. 7, в якому неактивний стан є режимом переривчастої передачі.
10. Спосіб за п. 7, в якому неактивний стан є найменшою швидкістю передачі в наборі швидкостей передачі.
11. Запам'ятовуючий пристрій, що зберігає комп'ютерну програму, яка, коли виконується, наказує комп'ютеру виконувати дії, при яких відбувається:
генерація заздалегідь заданої послідовності, використовуючи множину псевдовипадкових шумових послідовностей, причому заздалегідь задана послідовність має шумоподібні характеристики, і причому заздалегідь задана послідовність містить набори бітів для використання при генерації кореляційних піків, які забезпечують заздалегідь задану послідовність стійкістю до помилок в мовних кадрах; і
передача заздалегідь заданої послідовності через мовний кодек,
причому заздалегідь задана послідовність використовується як кадрова синхронізація для множини немовних кадрів,
причому початок меж немовного кадру немовних кадрів залежить щонайменше від відстані від часу зміщення в заздалегідь заданій послідовності до опорного моменту часу.
12. Пристрій зв'язку , який містить:
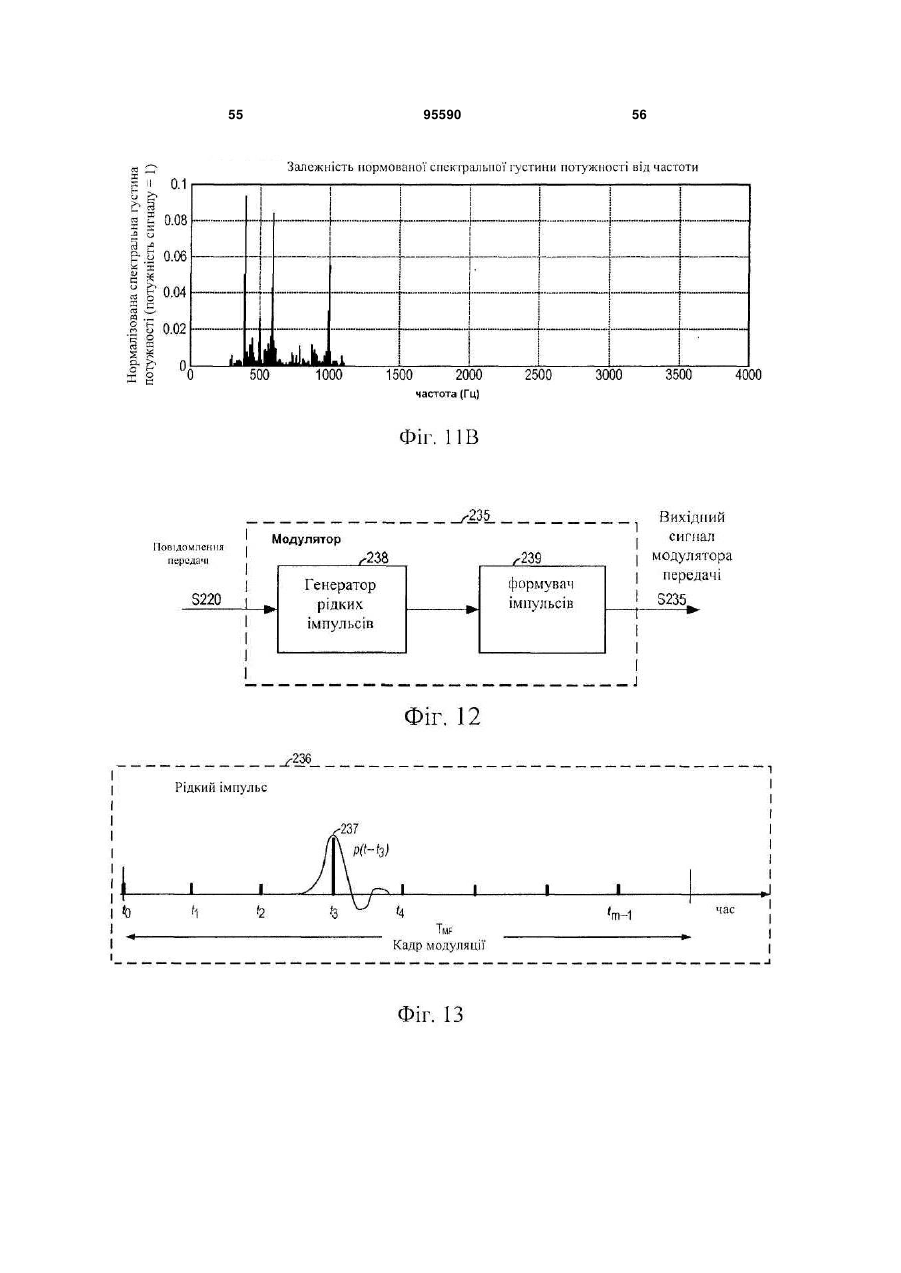
генератор, виконаний з можливістю генерації заздалегідь заданої послідовності, використовуючи множину псевдовипадкових шумових послідовностей, причому заздалегідь задана послідовність має шумоподібні характеристики, і причому заздалегідь задана послідовність містить набори бітів для використання при генерації кореляційних піків, які забезпечують заздалегідь задану послідовність стійкістю до помилок в мовних кадрах; і
мовний кодек, виконаний з можливістю обробки заздалегідь заданої послідовності для генерації мовного пакета,
причому заздалегідь задана послідовність використовується як кадрова синхронізація для множини немовних кадрів,
причому початок меж немовного кадру немовних кадрів залежить щонайменше від відстані від часу зміщення в заздалегідь заданій послідовності до опорного моменту часу.
13. Пристрій за п. 12, в якому заздалегідь задана послідовність є функцією щонайменше однієї з множини псевдовипадкових шумових послідовностей.
14. Пристрій за п. 13, в якому функція складається зі зв'язаної множини псевдовипадкових шумових послідовностей.
15. Пристрій за п. 13, в якому функція складається зі зв'язаної множини псевдовипадкових шумових послідовностей з множиною псевдовипадкових шумових послідовностей, які перекриваються і додаються.
16. Пристрій за п. 12, в якому кожен відлік заздалегідь заданої послідовності відділяється щонайменше одним відліком, що має двійкове значення 0.
17. Пристрій за п. 14, в якому щонайменше одна з псевдовипадкових шумових послідовностей інвертована.
18. Пристрій за п. 12, в якому генератор додатково конфігурується для генерації пробуджуючого сигналу перед заздалегідь заданою послідовністю для заборони елементу кодера вокодера переходити в неактивний стан.
19. Пристрій за п. 18, в якому пробуджуючий сигнал є синусоїдальним сигналом.
20. Пристрій за п. 18, в якому неактивний стан є режимом переривчастої передачі.
21. Пристрій за п. 18, в якому неактивний стан є найменшою швидкістю передачі в наборі швидкостей передачі.
22. Пристрій зв'язку , що містить:
засіб для генерації заздалегідь заданої послідовності, використовуючи множину псевдовипадкових шумових послідовностей, причому заздалегідь задана послідовність має шумоподібні характеристики, і причому заздалегідь задана послідовність містить набори бітів для використання при генерації кореляційних піків, які забезпечують заздалегідь задану послідовність стійкістю до помилок в мовних кадрах; і
засіб для передачі заздалегідь заданої послідовності через мовний кодек,
причому заздалегідь задана послідовність використовується як кадрова синхронізація для множини немовних кадрів,
причому початок меж немовного кадру немовних кадрів залежить щонайменше від відстані від часу зміщення в заздалегідь заданій послідовності до опорного моменту часу.
23. Пристрій за п. 22, в якому заздалегідь задана послідовність є функцією щонайменше однієї з множини псевдовипадкових шумових послідовностей.
24. Пристрій за п. 23, в якому функція складається зі зв'язаної множини псевдовипадкових шумових послідовностей.
25. Пристрій за п. 23, в якому функція складається зі зв'язаної множини псевдовипадкових шумових послідовностей з множиною псевдовипадкових шумових послідовностей, які перекриваються і додаються.
26. Пристрій за п. 22, в якому кожен відлік заздалегідь заданої послідовності відділяється щонайменше одним відліком, що має двійкове значення 0.
27. Пристрій за п. 24, в якому щонайменше одна з псевдовипадкових шумових послідовностей інвертована.
28. Пристрій за п. 22, в якому засіб для генерації додатково конфігурується для генерації пробуджуючого сигналу перед заздалегідь заданою послідовністю для заборони елементу кодера вокодера переходити в неактивний стан.
29. Пристрій за п. 28, в якому пробуджуючий сигнал є синусоїдальним сигналом.
30. Пристрій за п. 28, в якому неактивний стан є режимом переривчастої передачі.
31. Пристрій за п. 28, в якому неактивний стан є найменшою швидкістю передачі в наборі швидкостей передачі.
Текст
1. Спосіб синхронізації множини немовних кадрів через мовний кодек, що містить етапи, на яких відбувається: генерація заздалегідь заданої послідовності, використовуючи множину псевдовипадкових шумових послідовностей, причому заздалегідь задана послідовність має шумоподібні характеристики, і при 2 (19) 1 3 11. Запам'ятовуючий пристрій, що зберігає комп'ютерну програму, яка, коли виконується, наказує комп'ютеру виконувати дії, при яких відбувається: генерація заздалегідь заданої послідовності, використовуючи множину псевдовипадкових шумових послідовностей, причому заздалегідь задана послідовність має шумоподібні характеристики, і причому заздалегідь задана послідовність містить набори бітів для використання при генерації кореляційних піків, які забезпечують заздалегідь задану послідовність стійкістю до помилок в мовних кадрах; і передача заздалегідь заданої послідовності через мовний кодек, причому заздалегідь задана послідовність використовується як кадрова синхронізація для множини немовних кадрів, причому початок меж немовного кадру немовних кадрів залежить щонайменше від відстані від часу зміщення в заздалегідь заданій послідовності до опорного моменту часу. 12. Пристрій зв'язку , який містить: генератор, виконаний з можливістю генерації заздалегідь заданої послідовності, використовуючи множину псевдовипадкових шумових послідовностей, причому заздалегідь задана послідовність має шумоподібні характеристики, і причому заздалегідь задана послідовність містить набори бітів для використання при генерації кореляційних піків, які забезпечують заздалегідь задану послідовність стійкістю до помилок в мовних кадрах; і мовний кодек, виконаний з можливістю обробки заздалегідь заданої послідовності для генерації мовного пакета, причому заздалегідь задана послідовність використовується як кадрова синхронізація для множини немовних кадрів, причому початок меж немовного кадру немовних кадрів залежить щонайменше від відстані від часу зміщення в заздалегідь заданій послідовності до опорного моменту часу. 13. Пристрій за п. 12, в якому заздалегідь задана послідовність є функцією щонайменше однієї з множини псевдовипадкових шумових послідовностей. 14. Пристрій за п. 13, в якому функція складається зі зв'язаної множини псевдовипадкових шумових послідовностей. 15. Пристрій за п. 13, в якому функція складається зі зв'язаної множини псевдовипадкових шумових послідовностей з множиною псевдовипадкових шумових послідовностей, які перекриваються і додаються. 16. Пристрій за п. 12, в якому кожен відлік заздалегідь заданої послідовності відділяється щонайменше одним відліком, що має двійкове значення 0. 17. Пристрій за п. 14, в якому щонайменше одна з псевдовипадкових шумових послідовностей інвертована. 18. Пристрій за п. 12, в якому генератор додатково конфігурується для генерації пробуджуючого сиг 95590 4 налу перед заздалегідь заданою послідовністю для заборони елементу кодера вокодера переходити в неактивний стан. 19. Пристрій за п. 18, в якому пробуджуючий сигнал є синусоїдальним сигналом. 20. Пристрій за п. 18, в якому неактивний стан є режимом переривчастої передачі. 21. Пристрій за п. 18, в якому неактивний стан є найменшою швидкістю передачі в наборі швидкостей передачі. 22. Пристрій зв'язку , що містить: засіб для генерації заздалегідь заданої послідовності, використовуючи множину псевдовипадкових шумових послідовностей, причому заздалегідь задана послідовність має шумоподібні характеристики, і причому заздалегідь задана послідовність містить набори бітів для використання при генерації кореляційних піків, які забезпечують заздалегідь задану послідовність стійкістю до помилок в мовних кадрах; і засіб для передачі заздалегідь заданої послідовності через мовний кодек, причому заздалегідь задана послідовність використовується як кадрова синхронізація для множини немовних кадрів, причому початок меж немовного кадру немовних кадрів залежить щонайменше від відстані від часу зміщення в заздалегідь заданій послідовності до опорного моменту часу. 23. Пристрій за п. 22, в якому заздалегідь задана послідовність є функцією щонайменше однієї з множини псевдовипадкових шумових послідовностей. 24. Пристрій за п. 23, в якому функція складається зі зв'язаної множини псевдовипадкових шумових послідовностей. 25. Пристрій за п. 23, в якому функція складається зі зв'язаної множини псевдовипадкових шумових послідовностей з множиною псевдовипадкових шумових послідовностей, які перекриваються і додаються. 26. Пристрій за п. 22, в якому кожен відлік заздалегідь заданої послідовності відділяється щонайменше одним відліком, що має двійкове значення 0. 27. Пристрій за п. 24, в якому щонайменше одна з псевдовипадкових шумових послідовностей інвертована. 28. Пристрій за п. 22, в якому засіб для генерації додатково конфігурується для генерації пробуджуючого сигналу перед заздалегідь заданою послідовністю для заборони елементу кодера вокодера переходити в неактивний стан. 29. Пристрій за п. 28, в якому пробуджуючий сигнал є синусоїдальним сигналом. 30. Пристрій за п. 28, в якому неактивний стан є режимом переривчастої передачі. 31. Пристрій за п. 28, в якому неактивний стан є найменшою швидкістю передачі в наборі швидкостей передачі. 5 Запитування пріоритету Пріоритет запитується на основі наступних попередніх заявок США: № 61/059,179, озаглавлена "ROBUST SIGNAL FOR DATA TRANSMISSION OVER IN-BAND VOICE MODEM IN DIGITAL CELLULAR SYSTEMS", подана 5 червня 2008 року, що належить правовласнику даної заявки і таким чином явно включена сюди за допомогою посилання; і № 61/087,923, озаглавлена "SYSTEM AND METHOD OF AN IN-BAND MODEM FOR DATA COMMUNICATIONS OVER DIGITAL WIRELESS (OR CELLULAR) COMMUNICATION NETWORKS", подана 11 серпня 2008 року, що належить правовласнику даної заявки і таким чином явно включена сюди за допомогою посилання; і № 61/093,657, озаглавлена "SYSTEM AND METHOD OF AN INBAND MODEM FOR DATA COMMUNICATIONS OVER DIGITAL WIRELESS (OR CELLULAR) COMMUNICATION NETWORKS", подана 2 вересня 2008 року, що належить правовласнику даної заявки і таким чином явно включена сюди за допомогою посилання; і № 61/122,997, озаглавлена "SYSTEM AND METHOD OF AN IN-BAND MODEM FOR DATA COMMUNICATIONS OVER DIGITAL WIRELESS (OR CELLULAR) COMMUNICATION NETWORKS", подана 16 грудня 2008, що належить правовласнику даної заявки і таким чином явно включена сюди за допомогою посилання; і № 61/151,457, озаглавлена "SYSTEM AND METHOD FOR PROVIDING GENERAL BIDIRECTIONAL INBAND MODEM FUNCTIONALITY", подана 10 лютого 2009 року, що належить правовласнику даної заявки і таким чином явно включена сюди за допомогою посилання; і № 61/166,904, озаглавлена "SYSTEM AND METHOD OF AN IN-BAND MODEM FOR DATA COMMUNICATIONS OVER DIGITAL WIRELESS (OR CELLULAR) COMMUNICATION NETWORKS", подана 6 квітня 2009 року, що належить правовласнику даної заявки і таким чином явно включена сюди за допомогою посилання. Споріднені заявки Споріднені спільно заявлені патентні заявки США включають в себе: "SYSTEM AND METHOD OF AN IN-BAND MODEM FOR DATA COMMUNICATIONS OVER DIGITAL WIRELESS COMMUNICATION NETWORKS", що мас Attorney Docket № 081226U1, що належить правовласнику даної заявки і таким чином явно включена сюди за допомогою посилання; "SYSTEM AND METHOD OF AN IN-BAND MODEM FOR DATA COMMUNICATIONS OVER DIGITAL WIRELESS COMMUNICATION NETWORKS", що мас номер справи повіреного в США №081226U3, що належить правовласнику даної заявки і таким чином явно включена сюди за допомогою посилання; "SYSTEM AND METHOD OF AN IN-BAND MODEM FOR DATA COMMUNICATIONS OVER DIGITAL WIRELESS COMMUNICATION NETWORKS", що має номер справи повіреного в США № 081226U4, що належить правовласнику даної заявки і таким чином явно включена сюди за допомогою посилання. "SYSTEM AND METHOD OF AN IN-BAND MODEM FOR DATA COMMUNICATIONS OVER 95590 6 DIGITAL WIRELESS COMMUNICATION NETWORKS", що має номер справи повіреного в США № 081226U5, що належить правовласнику даної заявки і таким чином явно включена сюди за допомогою посилання. "SYSTEM AND METHOD OF AN IN-BAND MODEM FOR DATA COMMUNICATIONS OVER DIGITAL WIRELESS COMMUNICATION NETWORKS", та, що має номер справи повіреного в США № 081226U6, що належить правовласнику даної заявки і таким чином явно включена сюди за допомогою посилання. Попередній рівень техніки Галузь техніки Дане розкриття загалом належить до передачі даних по мовному каналу. Більш конкретно, розкриття належить до передачі немовної інформації через мовний кодек всередині смуги (in-band) в мережі зв'язку. Опис попереднього рівня техніки Передача мови була основою в системах зв'язку відтоді, як з'явилися фіксовані дротові телефони і бездротове радіо. Просування в дослідженні в системах зв'язку і розробці спрямували промисловість в напрямку цифрових систем. Однією з переваг цифрової системи зв'язку є можливість зменшення необхідної смуги пропускання за допомогою здійснення стиснення даних, призначених для передачі. У результаті багато досліджень і розробок пішло в напрямку технологій стиснення, особливо в галузі кодування мови. Звичайною апаратурою стиснення мови є "вокодер", який також взаємозамінно називається "мовний кодек" або "мовний кодер". Вокодер приймає оцифровані мовні відліки і виробляє набори бітів даних, відомі як "мовні пакети". Декілька стандартизованих алгоритмів вокодерів підтримується в різних цифрових системах зв'язку, які вимагають передачі мови, і насправді підтримка мови є мінімальною і істотною вимогою в більшості систем зв'язку в даний час. Проект 3GPP2 (The 3rd Generation Partnership Project 2) є прикладом організації по стандартизації, яка визначає системи зв'язку IS-95, СDМА2000 1xRTT (1х Radio Transmission Technology),CDMA2000 EV-DO (Evolution-Data Optimized) і CDMA2000 EV-DV (Evolution-Data/Voice). Проект 3GPP (The3rd Generation Partnership Project) є іншим прикладом організації по стандартизації, яка визначає системи GSM (Global System for Mobile Communications), UMTS (Universal Mobile Telecommunications System), HSDPA (High-Speed Downlink Packet Access), HSUPA (High-Speed Uplink Packet Access), HSPA+ (High-Speed Packet Access Evolution) і LTE (Long Term Evolution). Протокол VoIP (Voice over Internet Protocol) є прикладом протоколу, що використовується системами зв'язку, визначеними в стандартах 3GPP і 3GPP2, а також іншими. Приклади вокодерів, що здійснюються в таких системах зв'язку, і протоколів включають в себе ITU-T G.729 (International Telecommunications Union), мовний кодек AMR (Adaptive Multi-rate) і мовний кодек EVRC 7 (Enhanced Variable Rate Codec Speech Service Options 3,68,70). Спільне використання інформації є первинною метою сучасних систем зв'язку як підтримка попиту на негайну і глобальну можливість з'єднання. Користувачі сучасних систем зв'язку передають мову, відео, текстові повідомлення та інші дані, щоб залишатися з'єднаними. Нові додатки, що розробляються, мають тенденцію випереджати еволюцію мереж і можуть забажати модернізації протоколів і схем модуляції систем зв'язку. У деяких видалених географічних областях тільки мовні служби можуть бути доступні через нестачу підтримки інфраструктури для вдосконалених служб передачі даних в системі. Альтернативно, користувачі можуть вибрати можливість використати тільки мовні служби на їхньому пристрої зв'язку через економічні причини. У деяких країнах підтримка служб загального користування обов'язкова в мережі зв'язку, таких, як екстрені служби Е911 (Emergency911) або eCall (in-vehicle emergency call аварійний виклик всередині автотранспортного засобу). У цих прикладах екстрених застосувань, швидка передача є пріоритетом, але не завжди здійсненна, особливо, коли вдосконалені служби передачі даних не доступні на терміналі користувача. Попередні технології забезпечували рішення передачі даних через мовний кодек, але ці рішення можуть підтримувати тільки низькі швидкості передач даних через неефективність кодування, що мас місце при спробах кодування немовного сигналу за допомогою вокодера. Алгоритми стиснення мови, що здійснюється більшістю вокодерів, використовують технології "analysis by synthesis" для моделювання людського голосового апарату з набором параметрів. Набори параметрів звичайно включають в себе функції коефіцієнтів цифрових фільтрів, коефіцієнтів посилення і сигналів, що зберігаються, відомих як кодові книги, щоб згадати декілька. Пошук параметрів з найбільш близькою прийнятністю характеристикам вхідного мовного сигналу виконується кодером вокодера. Параметри потім використовуються в декодері вокодера для синтезу оцінки вхідної мови. Набори параметрів, доступні вокодеру для кодування сигналів, настроюються на кращу модель мови, що характеризується голосовими періодичними сегментами, а також неголосовими сегментами, які мають шумоподібні характеристики. Сигнали, які не містять періодичні або шумоподібні характеристики неефективно кодуються вокодером і можуть призводити до серйозних спотворень на виході декодера в деяких випадках. Приклади сигналів, які не виявляють характеристики мови, включають в себе часто змінювані "тональні" однієї частоти або сигнали "DTMF" (dual tone multiple frequency signals). Більшість вокодерів не можуть раціонально і ефективно кодувати такі сигнали. Передача даних через мовний кодек звичайно називається передачею даних "всередині смуги (in-band)", причому дані поміщаються в один або більше мовних пакетів з виходу мовного кодека. Декілька технологій використовують звукові тональні сигнали на заздалегідь заданих частотах в 95590 8 межах мовної смуги частот для представлення даних. Використання заздалегідь заданих по частоті тональних сигналів для передачі даних через мовні кодеки, особливо при високих швидкостях даних, є ненадійним через вокодери, що здійснюються в системах. Вокодери розроблені для моделювання мовних сигналів з використанням обмеженого числа параметрів. Обмежені параметри є недостатніми для ефективного моделювання тональних сигналів. Здатність вокодерів моделювати тональні сигнали додатково погіршується при спробах збільшити швидкість передачі даних за допомогою швидкої зміни тональних сигналів. Це погіршує точність детектування і призводить до необхідності додавання складних схем для мінімізації помилок даних, що в свою чергу ще більше зменшує загальну швидкість передачі даних в системі зв'язку. Тому виникає необхідність раціональної і ефективної передачі даних через мовний кодек в мережі зв'язку. Відповідно, було б корисним надати поліпшену систему для передачі і прийому інформації через мовний кодек в мережі зв'язку. Суть винаходу У варіантах здійснення, що розкриваються тут, вживаються заходів по відношенню до вказаних вище потреб за допомогою використання внутрішньосмугового модему для надійної передачі і прийому немовної інформації через мовний кодек. У одному варіанті здійснення, спосіб передачі немовної інформації через мовний кодек містить обробку множини вхідних символів даних для генерації множини перших імпульсних сигналів, формування множини перших імпульсних сигналів для генерації множини сформованих перших імпульсних сигналів і кодування множини сформованих перших імпульсних сигналів мовним кодеком. У іншому варіанті здійснення, пристрій містить процесор, виконаний з можливістю обробки множини вхідних символів даних для генерації множини перших імпульсних сигналів, формувач, виконаний з можливістю формування множини перших імпульсних сигналів для генерації множини сформованих перших імпульсних сигналів, і мовний кодек, виконаний з можливістю кодування множини сформованих перших імпульсних сигналів для генерації мовного пакета. У іншому варіанті здійснення, пристрій містить засіб для обробки множини вхідних символів даних для генерації множини перших імпульсних сигналів, засіб для формування множини перших імпульсних сигналів для генерації множини сформованих перших імпульсних сигналів і засіб для кодування перших імпульсних сигналів мовним кодеком. У іншому варіанті здійснення, спосіб синхронізації немовних кадрів через мовний кодек містить генерацію заздалегідь заданої послідовності, яка має шумоподібні характеристики і стійка до помилок в мовних кадрах, і передачу заздалегідь заданої послідовності через мовний кодек. У іншому варіанті здійснення, пристрій містить генератор, виконаний з можливістю генерації заздалегідь заданої послідовності, яка має шумоподібні характеристики і стійка до помилок в мовних 9 кадрах, і мовний кодек, виконаний з можливістю обробки заздалегідь заданої послідовності для генерації мовного пакета. У іншому варіанті здійснення, пристрій містить засіб для генерації заздалегідь заданої послідовності, яка має шумоподібні характеристики і стійка до помилок в мовних кадрах, і засіб для передачі заздалегідь заданої послідовності через мовний кодек. У іншому варіанті здійснення, спосіб для отримання немовних даних, вбудованих в пакет вокодера, містить прийом і декодування пакета вокодера, фільтрацію декодованого пакета вокодера, доки синхросигнал не буде детектований, обчислення часового зміщення на основі синхросигналу і витягання немовних даних, вбудованих в декодований пакет вокодера на основі часового зміщення. У іншому варіанті здійснення, пристрій містить приймач, виконаний з можливістю прийому і декодування пакета вокодера, фільтр, виконаний з можливістю фільтрації декодованого пакета вокодера доки синхросигнал не буде детектований, обчислювач, виконаний з можливістю обчислення часового зміщення па основі синхросигналу, і витягуючий пристрій, що конфігурується для витягання немовних даних, вбудованих в декодований пакет вокодера на основі часового зміщення. У іншому варіанті здійснення, пристрій містить засіб для прийому і декодування пакета вокодера, засіб для фільтрації декодованого пакета вокодера, доки синхросигнал не буде детектований, засіб для обчислення часового зміщення на основі синхросигналу і засіб для витягання немовних даних, вбудованих в декодований пакет вокодера на основі часового зміщення. У іншому варіанті здійснення, спосіб керування передачами вихідного термінала від термінала призначення у внутрішньосмуговій системі зв'язку містить передачу вихідного сигналу від термінала призначення, припинення передачі вихідного сигналу після детектування першого прийнятого сигналу, передачу сигналу негативного підтвердження (NACK) від термінала призначення, припинення передачі сигналу NACK після детектування успішно прийнятого повідомлення даних вихідного термінала, передачу сигналу підтвердження (ACK) від термінала призначення і припинення передачі сигналу ACK після передачі заздалегідь заданого числа сигналів ACK. У іншому варіанті здійснення, пристрій містить процесор, запам'ятовуючий пристрій з електронним зв'язком з процесором, інструкції, що зберігаються в запам'ятовуючому пристрої, інструкції, здатні виконувати стани передачі вихідного сигналу від термінала призначення, припинення передачі вихідного сигналу після детектуванняпершого прийнятого сигналу, передачу сигналу NACK від термінала призначення, припинення передачі сигналу NACK після детектування успішно прийнятого повідомлення даних вихідного термінала, передачу сигналу ACK від термінала призначення і припинення передачі сигналу ACK після передачі заздалегідь заданого числа сигналів ACK. 95590 10 У іншому варіанті здійснення, пристрій для керування передачами вихідного термінала від термінала призначення у внутрішньосмуговій системі зв'язку містить засіб для передачі вихідного сигналу від термінала призначення, засіб для припинення передачі вихідного сигналу після детектування першого прийнятого сигналу, засіб для передачі сигналу NACK від термінала призначення, засіб для припинення передачі сигналу NACK після детектування успішно прийнятого повідомлення даних вихідного термінала, засіб для передачі сигналу ACK від термінала призначення і засіб для припинення передачі сигналу ACK після передачі заздалегідь заданого числа сигналів ACK. У іншому варіанті здійснення, спосіб керування передачами вихідного термінала від вихідного термінала у внутрішньосмуговій системі зв'язку містить детектування сигналу запиту на вихідному терміналі, передачу синхросигналу від вихідного термінала після детектування сигналу запиту, передачу сегмента користувацьких даних від вихідного термінала з використанням першої схеми модуляції і припинення передачі сегмента користувацьких даних після детектування першого прийнятого сигналу. У іншому варіанті здійснення, пристрій містить процесор, запам'ятовуючий пристрій з електронним зв'язком з процесором, інструкції, що зберігаються в запам'ятовуючому пристрої, інструкції, здатні виконувати етапи детектування сигналу запиту на вихідному терміналі, передачу синхросигналу від вихідного термінала після детектування сигналу запиту, передачу сегмента користувацьких даних від вихідного термінала з використанням першої схеми модуляції і припинення передачі сегмента користувацьких даних після детектування першого прийнятого сигналу. У іншому варіанті здійснення, пристрій для керування передачами вихідного термінала від вихідного термінала у внутрішньосмуговій системі зв'язку містить засіб для детектування сигналу запиту на вихідному терміналі, засіб для передачі синхросигналу від вихідного термінала після детектування сигналу запиту, засіб для передачі сегмента користувацьких даних від вихідного термінала з використанням першої схеми модуляції і засіб для припинення передачі сегмента користувацьких даних після детектування першого прийнятого сигналу. У іншому варіанті здійснення, спосіб керування двоспрямованими передачами даних від термінала призначення у внутрішньосмуговій системі зв'язку містить передачу сигналу передачі від термінала призначення, припинення передачі сигналу передачі після детектування першого прийнятого сигналу, передачу синхросигналу від термінала призначення, передачу сегмента користувацьких даних від термінала призначення з використанням першої схеми модуляції і припинення передачі сегмента користувацьких даних після детектування другого прийнятого сигналу. У іншому варіанті здійснення, пристрій містить процесор, запам'ятовуючий пристрій з електронним зв'язком з процесором, інструкції, що зберіга 11 ються в запам'ятовуючому пристрої, інструкції, здатні виконувати стани передачі сигналу передачі від термінала призначення, припинення передачі сигналу передачі після детектування першого прийнятого сигналу, передачу синхросигналу від термінала призначення, передачу сегмента користувацьких даних від термінала призначення з використанням першої схеми модуляції і припинення передачі сегмента користувацьких даних після детектування другого прийнятого сигналу. У іншому варіанті здійснення, пристрій для керування двоспрямованими передачами даних від термінала призначення у внутрішньосмуговій системі зв'язку містить засіб для передачі сигналу передачі від термінала призначення, засіб для припинення передачі сигналу передачі після детектування першого прийнятого сигналу, засіб для передачі синхросигналу від термінала призначення, засіб для передачі сегмента користувацьких даних від термінала призначення з використанням першої схеми модуляції і засіб для припинення передачі сегмента користувацьких даних після детектування другого прийнятого сигналу. У іншому варіанті здійснення, система для передачі даних за внутрішньосмуговою системою зв'язку від рухомого об'єкта, що містить систему IVS (in-vehicle system - система всередині автотранспортного засобу), точці відповіді суспільної безпеки (public safety answering point,PSAP) містить один або більше датчиків, що розміщуються в IVS для надання даних датчиків IVS, передавач IVS, що розміщується в IVS для передачі даних датчиків IVS, приймач PSAP, що розміщується в PSAP для прийому даних датчиків IVS, передавач PSAP, що розміщується в PSAP для передачі даних команд PSAP, приймач IVS, що розміщується в IVS для прийому даних команд PSAP; причому передавач IVS містить засіб форматування повідомлень IVS для форматування даних датчиків IVS і генерації повідомлення IVS, процесор IVS для обробки повідомлення IVS і генерації множини сформованих імпульсних сигналів IVS, кодер мови IVS для кодування сформованих імпульсних сигналів IVS і генерації кодованого сигналу IVS, генератор синхронізації IVS для генерації синхросигналу IVS і контролер передачі IVS для передачі послідовності синхросигналів IVS і повідомлень IVS; причому приймач PSAP містить детектор PSAP для детектування синхросигналу IVS і генерації прапора синхронізації PSAP, демодулятор PSAP для демодуляції повідомлення IVS і генерації повідомлення IVS, що приймається; причому передавач PSAP містить засіб форматування повідомлень PSAP для форматування даних команд PSAP і генерації повідомлення команд PSAP, процесор PSAP для обробки повідомлення команд PSAP і генерації множини сформованих імпульсних сигналів PSAP, кодер мови PSAP для кодування сформованих імпульсних сигналів PSAP і генерації кодованого сигналу PSAP, генератор синхронізації PSAP для генерації синхросигналу PSAP і контролер передачі PSAP для передачі послідовності синхросигналів PSAP повідомлень команд PSAP; причому приймач IVS містить детектор IVS для детектування синхросигналу PSAP і 95590 12 генерації прапора синхронізації IVS і демодулятор IVS для демодуляції повідомлень PSAP і генерації повідомлення PSAP, що приймається. Короткий опис креслень Аспекти і супутні переваги варіантів здійснення, що розглядаються тут, будуть легше зрозумілі за допомогою посилання на наступний докладний опис при з'єднанні з супутніми кресленнями, причому: Фіг.1 є схемою варіанта здійснення вихідною термінала і термінала призначення, які використовують внутрішньосмуговий модем для передачі даних через мовний кодек в бездротовій мережі зв'язку. Фіг.2 є схемою варіанта здійснення модему передачі даних, що використовується у внутрішньосмуговій системі зв'язку. Фіг.3А с схемою варіанта здійснення генератора синхросигналу. Фіг.3В є схемою іншого варіанта здійснення генератора синхросигналу. Фіг.3С є схемою ще одного варіанта здійснення генератора синхросигналу. Фіг.4 є схемою варіанта здійснення генератора пакета синхронізації. Фіг.5 є схемою варіанта здійснення послідовності пакета синхронізації. Фіг.6А є схемою варіанта здійснення послідовності преамбули синхронізації. Фіг.6В є схемою варіанта здійснення послідовності преамбули синхронізації з опорними послідовностями, що не перекриваються. Фіг.7А є графіком вихідних даних кореляції преамбули синхронізації, де преамбула складена з опорних послідовностей, що не перекриваються. Фіг.7В є графіком вихідних даних кореляції преамбули синхронізації, де преамбула складена з опорних послідовностей, що перекриваються. Фіг.8А є схемою варіанта здійснення формату повідомлення синхронізації. Фіг.8В є схемою іншого варіанта здійснення формату повідомлення синхронізації. Фіг.8С є схемою ще одного варіанта здійснення формату повідомлення синхронізації. Фіг.9 є схемою варіанта здійснення формату повідомлення даних передачі. Фіг.10 є схемою варіанта здійснення складового формату повідомлення даних передачі і синхронізації. Фіг.11А є графіком спектральної густини потужності внутрішньосмугового сигналу, основаного на імпульсних сигналах, по відношенню до частоти. Фіг.11В є графіком спектральної густини потужності внутрішньосмугового сигналу, основаного на тональних сигналах, по відношенню до частоти. Фіг.12 є схемою варіанта здійснення модулятора даних з використанням розріджених імпульсів. Фіг.13 є схемою варіанта здійснення представлення символів даних розріджених імпульсів. Фіг.14А є схемою варіанта здійснення розміщення сформованих імпульсів в межах кадру модуляції з використанням технології циклічного повороту (wraparound). 13 Фіг.14В є схемою варіанта здійснення розміщення сформованих імпульсів в межах кадру модуляції для звичайного прикладу в даній галузі техніки. Фіг.15А є схемою варіанта здійснення детектора синхросигналу і контролера приймача. Фіг.15В є схемою іншого варіанта здійснення детектора синхросигналу і контролера приймача. Фіг.16 є схемою варіанта здійснення детектора пакета синхронізації. Фіг.17А є схемою варіанта здійснення детектора преамбули синхронізації. Фіг.17В є схемою іншого варіанта здійснення детектора преамбули синхронізації. Фіг.18А є схемою варіанта здійснення контролера детектора синхронізації. Фіг.18В є схемою іншого варіанта здійснення контролера детектора синхронізації. Фіг.19 є схемою варіанта здійснення пристрою регулювання синхронізації. Фіг.20 є схемою варіанта здійснення модему даних, що приймаються, який використовується у внутрішньосмуговій системі зв'язку. Фіг.21 є схемою варіанта здійснення системи аварійної сигналізації в рухомому об'єкті. Фіг.22 є схемою варіанта здійснення взаємодії послідовності запиту даних, що передається по низхідній лінії в термінал призначення зв'язку, і послідовності відповіді даних, що передається по висхідній лінії в вихідний термінал зв'язку, із взаємодією, що ініціюється терміналом призначення. Фіг.23A є схемою варіанта здійснення взаємодії послідовності запиту даних, що передається по низхідній лінії в термінал призначення зв'язку, і послідовності відповіді даних, що передається по висхідній лінії в вихідний термінал зв'язку, із взаємодією, що ініціюється вихідним терміналом. Фіг.23В є схемою іншого варіанта здійснення взаємодії послідовності запиту даних, що передається по низхідній лінії в термінал призначення зв'язку, і послідовності відповіді даних, що передається по висхідній лінії в вихідний термінал зв'язку, із взаємодією, що ініціюється вихідним терміналом. Фіг.24А є схемою варіанта здійснення взаємодії двоспрямованої послідовності запиту даних і послідовності відповіді даних, що передається як по низхідній лінії, так і по висхідній лінії. Фіг.24В є схемою іншого варіанта здійснення взаємодії двоспрямованої послідовності запиту даних і послідовності відповіді даних, що передається як по низхідній лінії, так і по висхідній лінії. Фіг.25 є схемою варіанта здійснення формату пакета користувацьких даних, де довжина користувацьких даних менша, ніж розмір пакета передачі. Фіг.26 є схемою варіанта здійснення формату пакета користувацьких даних, де довжина користувацьких даних більша, ніж розмір пакета передачі. Фіг.27А є схемою варіанта здійснення взаємодії послідовності запиту даних передачі і послідовності відповіді даних передачі, причому довжина користувацьких даних більша, ніж розмір пакета передачі. 95590 14 Фіг.27В є схемою іншого варіанта здійснення взаємодії послідовності запиту даних передачі і послідовності відповіді даних передачі, причому довжина користувацьких даних більша, ніж розмір пакета передачі. Фіг.27С є схемою ще одного варіанта здійснення взаємодії послідовності запиту даних передачі і послідовності відповіді даних передачі, причому довжина користувацьких даних більша, ніж розмір пакета передачі. Фіг.27D є схемою ще одного варіанта здійснення взаємодії послідовності запиту даних передачі і послідовності відповіді даних передачі, причому довжина користувацьких даних більша, ніж розмір пакета передачі. Докладний опис Фіг.1 зображує варіант здійснення системи внутрішньосмугової передачі даних, як можна було б здійснити в бездротовому вихідному терміналі 100. Вихідний термінал 100 обмінюється інформацією з терміналом 600 призначення через канали 501 і 502 зв'язку, мережу 500 і канал 503 зв'язку. Приклади прийнятних бездротових систем зв'язку включають в себе системи стільникового телефонного зв'язку, що працюють відповідно до стандартів GSM (Global System for Mobile Communication), 3GPP UMTS (Third Generation Partnership Project Universal Mobile Telecommunication System), 3GPP2 CDMA (Third Generation Partnership Project 2 Code Division Multiple Access), TD-SCDMA (Time Division Synchronous Code Division Multiple Access) і WiMAX (Worldwide Interoperability for Microwave Access). Фахівець в даній галузі техніки розпізнає, що технології, ті, які розглядаються тут можуть рівним чином застосовуватися до системи внутрішньосмугової передачі даних, яка не включає бездротового каналу. Мережа 500 зв'язку включає будь-яке поєднання обладнання маршрутизації/комутації, ліній зв'язку і іншої інфраструктури, прийнятної для встановлення лінії зв'язку між вихідним терміналом 100 і терміналом 600 призначення. Наприклад, канал 503 зв'язку може не бути бездротовою лінією. Вихідний термінал 100 звичайно функціонує як пристрій передачі мови. Передавач Тракт 200 основної смуги пропускання звичайно спрямовує мову користувача через вокодер, але також здатний спрямовувати немовні дані через вокодер у відповідь на запит, що створюється від вихідного термінала або мережі зв'язку. Напрямок немовних даних через вокодер є вигідним, оскільки він усуває необхідність для вихідного термінала запитувати і передавати дані по окремому каналу зв'язку. Немовні дані форматуються в повідомлення. Дані повідомлень, ще в цифровій формі, перетворюються в шумоподібний сигнал, що містить сформовані імпульси. Дані повідомлень закладаються в місцеположення імпульсів шумоподібного сигналу. Шумоподібний сигнал кодується вокодером. Вокодер не конфігурується порізному в залежності від того, чи надходить на вхід мова користувача або немовні дані, так, що вигідно перетворювати дані повідомлень в сигнал, який може ефективно кодуватися за допомогою набору 15 параметрів передачі, що призначаються вокодеру. Кодований шумоподібний сигнал передасться всередині смуги по лінії зв'язку. Оскільки інформація, що передається закладається в місцеположення імпульсів шумоподібного сигналу, надійне детектування залежить від відновлення синхронізації імпульсів, що належать до меж кадрів мовного кодека. Для допомоги приймачу в детектування передачі всередині смуги, заздалегідь заданий синхросигнал генерується і кодується вокодером перед передачею даних повідомлень. Послідовність синхронізації протоколу, керування і повідомлення передається, щоб забезпечити надійне детектування і демодуляцію немовних даних в приймачі. Посилаючись на тракт 200 основної смуги пропускання, звуковий сигнал Input Audio S210 надходить на процесор 215 звукового входу і мікрофона і передається через мультиплексор 220 на кодер 270 вокодера, де генеруються стислі мовні пакети. Прийнятний процесор звукового входу звичайно включає схему для перетворення вхідного сигналу в цифровий сигнал і пристрій формування сигналу для формування цифрового сигналу, такий як фільтр нижніх частот. Приклади прийнятних вокодерів включають в себе ті, які описуються наступними опорними стандартами: GSM-FR, GSM-HR, GSM-EFR, EVRC, EVRC-В, SMV, QCELP13K, IS-54, AMR,G.723.1,G.728, G.729, G.729.1, G.729a, G.718, G.722.1, AMR-WB, EVRC-WB, VMR-WB. Кодер 270 вокодера подає мовні пакети на передавач 295 і антену 296, і мовні пакети передаються по каналу 501 зв'язку. Запит для передачі даних може ініціюватися вихідним терміналом або через мережу зв'язку. Запит S215 передачі даних (Data Transmit Request) блокує мовний тракт через мультиплексор 220 і включає тракт передачі даних. Вхідні дані Input Data S200 заздалегідь обробляються пристроєм 210 форматування повідомлень даних і надходять на вихід як повідомлення S220 передачі (Тх Message) до модему 230 даних передачі (Тх). Вхідні дані S200 можуть включати інформацію користувацького інтерфейсу (user interface,UI), інформацію місцеположення користувача, часові відмітки, інформацію датчиків обладнання або інші прийнятні дані. Приклад пристрою 210 форматування прийнятних даних включає схему для обчислення і приєднання бітів контролю за допомогою циклічної надмірності (cyclic redundancy check,CRC) до вхідних даних, забезпечує буферну пам'ять повторної передачі, здійснює кодування із захистом від помилок, таке як HARQ (hybrid automatic repeat-request), і перемежовування вхідних даних. Модем 230 даних передачі перетворює повідомлення S220 передачі в дані S230 передачі (Тх Data) сигналу передачі, який надходить через мультиплексор 220 до кодеру 270 вокодера. Як тільки завершується передача даних, мовний тракт може бути повторно включений через мультиплексор 220. Фіг.2 є відповідною зразковою блок-схемою модему 230 даних передачі, показаного на Фіг.1. Три сигнали можуть мультиплексуватися у часі через мультиплексор 259 у вихідний сигнал даних 95590 16 S230 передачі; Sync Out S245, Mute Out S240 і Тх Mod Out S235. Очевидно, що різні порядки і поєднання сигналів Sync Out S245, Mute Out S240 і Тх Mod Out S235 можуть надходити на вихід в дані S230 передачі. Наприклад, Sync Out S245 може передаватися перед кожним сегментом даних Тх Mod Out S235. Або Sync Out S245 може передаватися один раз перед повним сигналом Тх Mod Out S235 при сигналі Mute Out S240, що передається між кожним сегментом даних Тх Mod Out S235. Сигнал Sync Out S245 є синхросигналом, що використовується для встановлення синхронізації на приймальному терміналі. Синхросигнали потрібні для встановлення синхронізації для внутрішньосмугових даних, що передаються, оскільки інформація даних закладається в місцеположення імпульсів шумоподібного сигналу. Фіг.3А зображує прийнятну зразкову блок-схему генератора 240 синхросигналу, зображеного на Фіг.2. Три сигнали можуть мультиплексуватися у часі через мультиплексор 247 в сигнал Sync Out S245;Sync Burst S241,Wakeup Out S236 і Sync Preamble Out S242. Повинно бути очевидно, що різні порядки і поєднання сигналів Sync Burst S241, Wakeup Out S236 і Sync Preamble Out S242 можуть надходити на вихід в сигналі Sync Out S245. Наприклад, Фіг.3В зображує генератор 240 синхросигналу, що містить Wakeup Out S236 і Sync Preamble Out S242, де сигнал Wakeup Out S236 може передаватися перед кожним сигналом Sync Preamble Out S242. Альтернативно, Фіг.3С зображує генератор 240 синхросигналу, що містить Sync Burst S241 і Sync Preamble Out S242, де сигнал Sync Burst S241 може передаватися перед кожним сигналом Sync Preamble Out S242. Знову посилаючись на Фіг.3А, сигнал Sync Burst S241 використовується, щоб встановити точну синхронізацію в приймачі і складається з щонайменше одного синусоїдального частотного сигналу, що має заздалегідь задану частоту відліків, послідовність і тривалість і генерується за допомогою генератора 250 пакета синхронізації (Sync Burst), зображеного на Фіг.4. Синусоїдальний сигнал 251 з частотою 1 представляє двійкові дані +1 і Синусоїдальний сигнал 252 з частотою 2 представляє двійкові дані -1. Приклади прийнятних сигналів включають в себе синусоїдальні сигнали зі сталою частотою в мовній смузі, такій як 395 Гц, 540 Гц і 512 Гц для одного синусоїдального сигналу і 558 Гц, 1035 Гц і 724 Гц для іншого синусоїдального сигналу. Пристрій 253 послідовності пакета синхронізації визначає, сигнал з якою частотою мультиплексується через мультиплексор 254. Інформаційна послідовність, що модулюється в пакет синхронізації, повинна мати хороші автокореляційні властивості. Прикладом прийнятної послідовності пакета синхронізації (Sync Burst Sequence) 253 є код Баркера довжиною 7, зображений на Фіг.5. Для кожного символу '+' на вихід надходить синусоїдальний сигнал з частотою 1 на Sync Burst S241 і для кожного символу '-' на вихід надходить синусоїдальний сигнал з частотою 2. Знову посилаючись на Фіг.3А, сигнал Sync Preamble Out S242 використовується для встановлення хорошої (на основі відліків) синхронізації в 17 приймачі і складається із заздалегідь заданого шаблону даних, відомих в приймачі. Відповідним прикладом заздалегідь заданого шаблону даних Sync Preamble Out S242 є послідовність преамбули синхронізації (Sync Preamble Sequence) 241, зображена на Фіг.6А. Складена послідовність 245 преамбули генерується за допомогою з'єднання декількох періодів псевдовипадкової шумової (pseudorandom noise, PN) послідовності 242 з результатом PN послідовності 244, що перекривається і додається, і інвертованою версією PN послідовності 244. Символи '+' в складеній послідовності 245 преамбули представляють двійкові дані +1 і символи '-' представляють двійкові дані -1. У іншому прийнятному прикладі додаються нульові відліки між бітами даних PN послідовності. Це забезпечує часову відстань між бітами даних для обліку афектів "розмивання", що викликаються пропускними характеристиками каналу, який має тенденцію розширювати енергію біта даних на декілька бітових часових інтервалів. Раніше описана конструкція преамбули синхронізації, використовуючи з'єднані інтервали PN послідовності з ділянками інвертованих версій PN послідовності, що перекриваються, забезпечує переваги в зменшеному часі передачі, поліпшених кореляційних властивостях і поліпшених характеристиках детектування. Переваги призводять до преамбули, що стійка до помилок передачі мовних кадрів. За допомогою перекриття ділянок PN, підсумкова складена преамбула синхронізації складається з меншого числа бітів в послідовності в порівнянні з версією, що не перекривається, тим самим зменшуючи повний час, необхідний для передачі складеної послідовності 245 преамбули. Для ілюстрації поліпшення кореляційних властивостей преамбули синхронізації, що перекривається, Фіг.7А і Фіг.7В показують порівняння між кореляцією PN послідовності 242 зі складеною послідовністю 245b преамбули, що не перекривається, зображеною на Фіг.6В, і кореляцію PN послідовності 242 зі складеною послідовністю 245 преамбули синхронізації, що перекривається, зображеною на Фіг.6А. Фіг.7А зображує основні кореляційні піки, як позитивні, так і негативні, а також незначні кореляційні піки, що розміщуються між основними піками для складеної послідовності 245b преамбули синхронізації, що не перекривається. Негативний пік 1010 виходить з кореляції PN послідовності 242 з першою інвертованою ділянкою складеної послідовності 245b преамбули, що не перекривається. Позитивні кореляційні піки 1011,1012,1013 виходять з кореляції PN послідовності 242 з трьома з'єднаними ділянками PN послідовності 242, які складають середню ділянку складеної послідовності 245b преамбули, що не перекривається. Негативний пік 1014 виходить з кореляції PN послідовності 242 з другою інвертованою ділянкою складеної послідовності 245b преамбули, що не перекривається. На Фіг.7A, незначний кореляційний пік 1015, що відповідає змі 95590 18 щенню 3 відліків від першого позитивного кореляційного піка 1011 зображує амплітуду приблизно 5 (1/3 амплітуди основних піків). Фіг.7В зображує декілька основних кореляційних піків, як позитивних, так і негативних, а також незначних кореляційних піків між основними піками для складеної послідовності 245 преамбули синхронізації, що перекривається. На Фіг.7В, незначний кореляційний пік 1016, що відповідає зміщенню 3 PN відліку від першого позитивного кореляційного піка 1011 зображує амплітуду приблизно 3 (1/5 амплітуди основних піків). Менша амплітуда незначного кореляційного піка 1016 для преамбули, що перекривається, зображеного на Фіг.7В, виходить з менших помилок детектування преамбули основних кореляційних піків в порівнянні з незначним піком 1015, що не перекривається, приклад якого зображений на Фіг.7А. Як зображено на Фіг.7В, п'ять основних піків генеруються при кореляції PN послідовності 242 зі складовою послідовністю 245 преамбули синхронізації. Зображений шаблон (1 негативний пік, 3 позитивних пік і 1 негативний пік) дозволяє визначити кадрову синхронізацію на основі будь-яких 3 визначених піків і прийнятні часові відстані між піками. Поєднання 3 детектованих піків з відповідною часовою відстанню завжди унікальне. Подібне зображення шаблону кореляційних піків зображеного в Таблиці 1, де кореляційні піки означаються '-' для негативного піка і '+' для позитивного піка. Технологія використання унікального шаблону кореляційних піків вигідна для внутрішньосмугових систем, оскільки унікальний шаблон компенсує можливі втрати мовних кадрів, наприклад, через погані умови каналу. Втрата мовного кадру може також призвести до втрати кореляційного піка. За допомогою унікального шаблону кореляційних піків, що розділяються заздалегідь заданими часовими відстанями, приймач може надійно детектувати преамбулу синхронізації навіть з втраченими мовними кадрами, які призводять до втрати кореляційних піків. Декілька прикладів зображені в Таблиці 2 для поєднання 3 детектованих піків в шаблоні (2 піки втрачені в кожному прикладі). Кожна компонента в Таблиці 2 представляє унікальний шаблон піків і часових відстаней між піками. Приклад 1 в Таблиці 2 зображує детектовані піки 3, 4 і 5 (піки 1 і 2 були втрачені), приводячи до шаблону '+ + -' з однією заздалегідь заданою відстанню між кожним піком. Приклади 2 і 3 в Таблиці 2 також зображають шаблон '+ + -', однак відстані різні. Приклад 2 має дві заздалегідь задані відстані між детектованими піками 2 і 4, в той час як Приклад 3 має дві заздалегідь задані відстані між детектованими піками 3 і 5. Так Приклади 1,2 і 3 кожен представляють унікальний шаблон, з якого може бути отримана кадрова синхронізація. Повинно бути очевидно, що детектовані піки можуть розширюватися через межі кадрів, але, що унікальні шаблони і заздалегідь задані відстані ще застосовуються. 19 95590 20 Таблиця 1 Полярність кореляційного піка 1 2 + Номер кореляційного піка 3 4 + + 5 Таблиця 2 1 Детектовані кореляційні піки Приклад 1 Приклад 2 Приклад 3 Приклад 4 Приклад 5 Приклад 6 Приклад 7 Приклад 8 Приклад 9 Приклад 10 Фахівець в даній галузі техніки розпізнає, що різні послідовності преамбули призводять до різного шаблону кореляційних піків, зображеного на Фіг.7В, і Таблиця 1може використовуватися. Фахівець в даній галузі техніки також розпізнає, що багато шаблонів кореляційних піків може використовуватися для визначення різних режимів роботи або бітів інформації передачі. Приклад альтерна Номер кореляційного піка 3 4 + + + + + + + + + + + + + + + + + + 2 5 тивного шаблону кореляційних піків зображений в Таблиці 3. Шаблон кореляційних піків, зображений в Таблиці 3, забезпечує унікальний шаблон, з якого може отримуватися кадрова синхронізація, як описано раніше. Мати багато шаблонів кореляційних піків вигідно для визначення різних конфігурацій передавача в приймачі, таких як формати повідомлень або схеми модуляції. Таблиця 3 Полярність кореляційного піка 1 + Посилаючись знову на Фіг.3А, сигнал Wakeup Out S236 використовується для запуску кодера 270 вокодера для пробудження з режиму очікування, режиму низької швидкості передачі або режиму переривчастої передачі. Сигнал Wakeup Out S236 може також використовуватися для заборони кодеру 270 вокодера від входження в режим очікування, режим низької швидкості передачі або режим переривчастої передачі. Сигнал Wakeup Out S236 генерується генератором 256 сигналу Wakeup. Сигнали Wakeup вигідні при передачі внутрішньосмугових даних через вокодери, які здійснюють очікування, функції переривчастої передачі (discontinuous transmit functions, DTX) або працюють на низькій швидкості передачі під час неактивних мовних ділянок, щоб мінімізувати затримку запуску, яка може трапитися при переході з неактивного мовного режиму в активний мовний режим. Сигнали Wakeup можуть також використовуватися для визначення характеристик режиму передачі; наприклад, тип використовуваної схеми модуляції. Першим прикладом прийнятного сигналу Wakeup Out S236 є окремий синусоїдальний сигнал зі сталою частотою в мовній смузі, такій як 395 Гц. У цьому першому прикладі, сигнал Wakeup забороняє кодеру 270 вокодера входження в ре 2 Номер кореляційного піка 3 4 5 + жим очікування, режим DTX або режим низької швидкості передачі. У цьому першому прикладі, приймач ігнорує переданий сигнал Wakeup Out S236. Другим прикладом прийнятного сигналу Wakeup Out S236 є сигнал, складений з багатьох синусоїдальних сигналів, причому кожен сигнал визначає конкретну схему модуляції даних, наприклад, 500 Гц для схеми 1 модуляції і 800 Гц для схеми 2 модуляції. У цьому другому прикладі, сигнал Wakeup забороняє кодеру 270 вокодера входження в режим очікування, режим DTX або режим низької швидкості передачі. У цьому другому прикладі, приймач використовує переданий сигнал Wakeup Out S236 для визначення схеми модуляції даних. Прикладом складового сигналу Sync Out S245 є сигнал, складений з мультиплексованих сигналів Sync Burst S241 і Sync Preamble Out S242, як зображено на Фіг.8А. Tsb701 і Tsp702 представляють тривалість у часі, з якою кожен сигнал передасться. Прикладом прийнятного діапазону для Tsb є 120-140 мілісекунд і для Tsp є 40-200 мілісекунд. Іншим прикладом складового сигналу Sync Out S245 є сигнал, складений з мультиплексованих сигналів Wakeup Out S236 і Sync Preamble Out S242, як зображено на Фіг.8В. Twu711 і Tsp702 21 95590 представляють тривалість у часі, з якою кожен сигнал передається. Прикладом прийнятного діапазону для Twu є 10-60 мілісекунд і для Tsp є 40200 мілісекунд. Іншим прикладом складового сигналу Sync Out S245 є сигнал, складений з мультиплексованих сигналів Wakeup Out S236, Sync Burst S241 і Sync Preamble Out S242, як зображено на Фіг.8С. Twu 711, Tsp1 721,Tsb 701,Tsp2 722 представляють прийнятного діапазону для Twu є 20-80 мілісекунд, Tsp1 є 40-200 мілісекунд, Tsb є 120-140 мілісекунд і Tsp2 є 40-200 мілісекунд. Знову посилаючись на Фіг.2, прийнятним прикладом сигналу Тх Mod Out S235 є сигнал, що генерується модулятором 235, який використовує модуляцію позиції імпульсу (pulse-position modulation,PPM) зі спеціальними форматами імпульсу модуляції. Ця технологія модуляції призводить до низьких спотворень при кодуванні і декодування за допомогою різних типів вокодерів. Крім того, ця технологія призводить до хороших автокореляційних властивостей і може бути легко детектована за допомогою приймача, узгодженого з формою сигналу. Крім того, сформовані імпульси не мають тональну структуру; замість цього сигнали мають спектр подібно до спектра шуму в частотній області, а також зберігають шумоподібну звукову характеристику. Приклад спектральної густини потужності сигналу на основі сформованих імпульсів зображений на Фіг.11А. Як може бути видно на Фіг.11А, спектральна густина потужності відображає шумоподібну характеристику в діапазоні частот всередині смуги (постійна енергія в діапазоні частот). Навпаки, приклад спектральної густини потужності сигналу з тональною структурою зображується на Фіг.11В, де дані представляються тональними сигналами на частотах приблизно 400 Гц, 600 Гц і 1000 Гц. Як може бути видно на Фіг.11В, спектральна густина потужності відображає "шипи" істотної енергії в діапазоні частот всередині смуги на частотах тональних сигналів і їх гармоніках. 22 Фіг.12 є зразковою блок-схемою модулятора 235, зображеного на Фіг.2. Генератор 238 розріджених імпульсів генерує імпульси, що відповідають вхідному повідомленню S220 передачі (Тх Message), використовуючи модуляцію позиції імпульсу (pulse position modulation,PPM), і потім формувач 239 імпульсу формує імпульси для створення сигналу для кращої якості кодування в кодері вокодера. Прийнятний приклад розрідженого імпульсу зображений на Фіг.13. Часова вісь ділиться на кадри модуляції тривалості TMF. У межах кожного кадру модуляції визначається декілька моментів часу t0, t1, …, tm-1 відносно межі кадру модуляції, які визначають потенційні позиції базового імпульсу p(t). Наприклад, імпульс 237 на позиції t3 позначається як р(t-t3). Біти інформації повідомлення S220 передачі, що надходять на модулятор 235, відображаються в символи з відповідною трансляцією в позиції імпульсів відповідно до таблиці відображення. Імпульс може також формуватися з трансформуванням полярності, ±p(t). Символи тому можуть представлятися одним з 2m різних сигналів в межах кадру модуляції, де m представляє число моментів часу, що визначаються для кадру модуляції і коефіцієнт множення, 2, представляє позитивну і негативну полярність. Приклад прийнятного відображення позиції імпульсу зображений в Таблиці 4. У цьому прикладі модулятор відображає 4-бітний символ для кожного кадру модуляції. Кожен символ представляється в термінах позиції k форми імпульсу р(n-k) і знаку імпульсу. У цьому прикладі, ТMF дорівнює 4 мілісекундам, що призводить до 32 можливих позицій для 8 КГц частоти дискретизації. Імпульси розділяються за допомогою 4 моментів часу, що призводить до призначення 16 різних сполучень позицій імпульсу і полярності. У цьому прикладі, ефективна швидкість передачі даних дорівнює 4 бітам на символ на інтервалі 4 мілісекунди або 1000 біт/с. Таблиця 4 Символ десятковий 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 Імпульс двійковий 0000 0001 0010 0011 0100 0101 0110 0111 1000 1001 1010 1011 1100 1101 1110 1111 p(n-0) p(n-4) p(n-8) p(n-12) p(n-16) p(n-20) p(n-24) p(n-28) -p(n-28) -p(n-24) -p(n-20) -p(n-16) -p(n-12) -p(n-8) -p(n-4) -p(n-0) 23 95590 Інший приклад прийнятного відображення позиції імпульсу зображений в Таблиці 5. У цьому прикладі, модулятор відображає 3-бітний символ для кожного кадру модуляції. Кожен символ представляється в термінах позиції k форми імпульсу p(n-k) і знаку імпульсу. У цьому прикладі, ТMF дорівнює 2 мілісекунд, що призводить до 16 можливих 24 позицій для частоти дискретизації 8 кГц. Імпульси розділяються за допомогою 4 моментів часу, що призводить до призначення 8 різних сполучень позицій імпульсу і полярності. У цьому прикладі, ефективна швидкість передачі даних дорівнює 3 біти на символ на інтервалі 2 мілісекунди або 1500 біт/с. Таблиця 5 Символ десятковий 0 1 2 3 4 5 6 7 Імпульс двійковий 000 001 010 011 100 101 110 111 Для збільшення надійності в поганих умовах каналу, модулятор 235 може збільшувати тривалість кадру модуляції ТMF при забезпеченні сталого числа моментів часу t0, t1, …, tm-1. Ця технологія служить для розміщення більшої часової відстані між імпульсами, що призводить до більш надійної демодуляції. Приклад прийнятного відображення позиції імпульсу включає TMF, що дорівнює 4 мілісекундам, що призводить до 32 можливих позицій для 8 кГц частоти дискретизації. Як в попередньому прикладі, якщо імпульси розділяються за допомогою 4 моментів часу, відображення призводить до призначення 16 сполучень різних позицій імпульсу і полярності. Однак, в цьому прикладі, розділення між моментами часу збільшується в 2 рази від попереднього прикладу, призводячи до 8 різних сполучень позицій імпульсу і полярності. У прийнятному прикладі, модулятор 235 може перемикатися між різними відображеннями позицій імпульсу або тривалістю кадру модуляції в залежності від сигналу зворотного зв'язку, що вказує p(n) p(n-4) p(n-8) p(n-12) -p(n-12) -p(n-8) -p(n-4) -p(n) умови каналу або успіх передачі. Наприклад, модулятор 235 може почати передачу, використовуючи ТMF, що дорівнює 2 мілісекундам, потім перемкнутися на ТMF, що дорівнює 4 мілісекундам, якщо умови каналу визначаються як погані. Для збільшення надійності з конкретними вокодерами, модулятор 235 може змінювати початкове часове зміщення у відображенні позиції імпульсу. Приклад прийнятного відображення позиції імпульсу зображений в Таблиці 6. У цьому прикладі, модулятор відображає 3-бітний символ на кадр модуляції. Кожен символ представляється в термінах позиції k імпульсу форми p(n-k) і знаку імпульсу. У цьому прикладі, ТMF, що дорівнює 2 мілісекундам, що призводить до 16 можливих позицій для 8 кГц частоти дискретизації. Початкове зміщення встановлюється на 1 момент часу і імпульси розділяються за допомогою 4 моментів часу, що призводить до призначення 8 різних сполучень позицій імпульсу і полярності як зображено в таблиці. Таблиця 6 Символ десятковий 0 1 2 3 4 5 6 7 Імпульс двійковий 000 001 010 011 100 101 110 111 Повинно бути очевидно, що зменшення числа відокремлюючих моментів часу призведе до збільшення числа бітів на символ і таким чином до більш високих швидкостей даних. Наприклад, якщо ТMF дорівнює 4 мілісекундам, то підсумкове число можливих позицій для 8 кГц частоти дискретизації дорівнює 32 з позитивною або негативною р(n-1) р(n-5) р(n-9) р(n-13) -р(n-13) -р(n-9) -р(n-5) -p(n-1) полярністю для кожної, що призводить до 64 різних сигналів, якщо не включається розділення. Для відображення 64 позицій, число підтримуваних бітів на символ дорівнює 6, і підсумкова ефективна швидкість передачі даних дорівнює 1500 біт/с. Слід також визнати, що різні поєднання TMF і частоти дискретизації можуть використову 25 95590 ватися для отримання необхідної ефективної бітової швидкості. Прикладом прийнятного формувача 239 імпульсу є root-raised косинусне перетворення вигляду: 4 1 , t0 Ts 2 2 r t 1 sin 1 cos , t 4 4 4 2 sin t 1 4 t cos t 1 Ts Ts Ts , інакше 2 t t 1 4 Ts Ts де є коефіцієнтом вибірковості, 1/TS c максимальною символьною швидкістю і t є моментом часу дискретизації. Для попереднього прикладу з 32 можливими позиціями імпульсу (моментами часу), наступне перетворення генерує root raised косинусоїдальну форму імпульсу, де число нулів перед першим ненульовим елементом імпульсу визначає точну позицію імпульсу в межах кадру. r n [0 0 0 4 0 - 200 560 - 991- 1400 7636 15000 7636 - 1400 - 991 560 - 200 40 0000 0000 0000 0 0 0 0] Повинно бути очевидно, що перетворення може бути скорочене або збільшене для різних варіантів модуляції і розмірів кадру. Фіг.14А с прикладом розміщення імпульсу в межах кадру модуляції для створення конкретного запису в алфавіті модуляції. На Фіг.14А, імпульс представляється 13 відліками, показаними як Р0Р12, де кожен відлік представляє ненульові елементи r(n), зображені в попередньому прикладі. Фіг.14В є прикладом типової реалізації в даній галузі техніки. На Фіг.14В, імпульс розміщується при зміщенні 7 в межах кадру модуляції TMF(n) 1003 і "хвіст" імпульсу розширяється на наступний кадр модуляції TMF(n+1) 1004 4 відліками (Р9-Р12). Відліки від кадру модуляції TMF(n) 1003, що розширяються на наступний кадр модуляції TMF(n+1) 1004, як зображено на Фіг.14В, призведуть до міжсимвольних спотворень, якщо відліки імпульсу для кадру TMF(n+l) розташовуються в будь-якому з перших 4 відліків кадру TMF(n+1), оскільки станеться перекриття відліків. Альтернативно, в технології "wraparound", зображеній на Фіг.14А, відліки в хвості, які розширяються на наступний кадр модуля 26 ції, TMF(n+1) 1004, розміщуються на початку поточного кадру модуляції, TMF(n) 1003. Відліки (Р9-Р12) за допомогою технології wraparound розміщуються на початку TMF(n) на відліках 0-3. З використанням технології wraparound для генерації алфавіту модуляції виключаються випадки, де відліки сформованих імпульсів розширяються на наступний кадр модуляції. Технологія wraparound вигідна, оскільки вона призводить до зменшення міжсимвольних перешкод, які виявляються, якщо відліки сформованих імпульсів в поточному кадрі розширяються на наступний кадр і перекриваються з відліками сформованих імпульсів в наступному кадрі. Фахівець в даній галузі техніки розпізнає, що технологія wraparound може використовуватися для будьякої позиції імпульсу в кадрі модуляції, який приводить до відліків, що розширюються на наступний кадр модуляції. Наприклад, імпульс, той, що розміщується при зміщенні 8 в межах кадру модуляції TMF(n) 1003 буде wraparound відліками (Р8-Р12). Іншим прикладом прийнятного формувача 239 імпульсу є сигнал з трансформованою амплітудою вигляду: r(n)p(n-t) Приклад сигналу з трансформованою амплітудою з 32 відліками має вигляд: r n [-2000 0 6000 - 2000 0000 0000 0000 0000 0000 0000 0 0 0 0] Іншим прикладом прийнятного формувача 239 імпульсу є фільтр синтезу з лінійним прогнозом (linear prediction, LPC). Відгук зразкового рекурсивного фільтра синтезу LPC визначається його імпульсною характеристикою hn n 10 aihn i i 1 і коефіцієнти: а(і)={-6312, 5677, -2377, 1234, -2418, 3519, -2839,1927, -629, 96}/4096, і=1,…, 10. Фільтри з лінійним прогнозом добре відомі в даній галузі техніки. Залишковий сигнал r(n) спочатку створюється вхідними символами відповідно до приведеної вище таблиці відображення імпульсу. Реальна форма імпульсу модуляції потім одержується в результаті фільтрації модульованого сигналу r(n) з допомогою h(n). Фахівець в даній галузі техніки розпізнає, що технології, які розглядаються тут, можуть рівним чином застосовуватися до різних форм імпульсу і перетворень. Довжина форм сигналів і схеми модуляції, що застосовується до цих форм сигналів, можуть також змінюватися. Крім того, форми імпульсів можуть використати повністю некорельовані (або ортогональні) форми сигналів для представлення різних символів. Крім полярності сформова 27 ного імпульсу, амплітуда сформованого імпульсу може також використовуватися для передачі інформації. Посилаючись знову на Фіг.2, сигнал Mute Out S240 є сигналом, що використовується для розділення передач повідомлень Тх і генерується за допомогою Muting генератора 255. Приклад прийнятного складового сигналу Тх Data S230, складеного з мультиплексованих сигналів Тх Mod Out S235 і Mute Out S240, зображений на Фіг.9. Tmu1 731, Td1 732, Tmu2 733, Td2 734,Tmu3 735, Td3 736 і Tmu4 737 представляють тривалість у часі, з якою кожен сигнал передається. Прикладом прийнятного діапазону для Tmu1, Tmu2, Tmu3 і Tmu4 є 10-60 мілісекунд і для Td1, Td2 і Td3 є 300-320 мілісекунд для нормальної роботи і 600-640 мілісекунд для надійної роботи. Прикладом прийнятної послідовності Muting генератора може бути сигнал послідовності з всіма нулями або синусоїдальний частотний сигнал. Інший прийнятний приклад сигналу, що використовується для розділення передач повідомлень Тх, зображений на Фіг.10. У цьому прикладі, сигнал Wakeup Out S236 і Sync Preamble Out S242 передують кожній передачі сигналу Тх Mod Out S235. Фахівець в даній галузі техніки розпізнає, що різні поєднання сигналів Sync Preamble Out S242, Mute Out S240 і Тх Mod Out S235 можуть рівним чином застосовуватися. Наприклад, сигналу Тх Mod Out S235 на Фіг.10 може передувати і слідувати Mute Out S240. Приймач Посилаючись на Фіг.1, тракт 400 основної смуги прийому звичайно спрямовує декодовані мовні пакети від вокодера на аудіо процесор, але також здатний спрямовувати декодований пакети через демодулятор даних. Оскільки немовні дані були перетворені в шумоподібний сигнал і закодовані за допомогою вокодера на передавачі, вокодер приймача може ефективно декодувати дані з мінімальним спотворенням. Декодовані пакети безперервно спостерігаються для внутрішньосмугового синхросигналу. Якщо синхросигнал виявлений, то кадрова синхронізація відновлюється, і декодовані пакетні дані направляються в демодулятор даних. Декодовані пакетні дані демодулюються в повідомлення. Повідомлення зазнають зворотного форматування і надходять на вихід. Послідовність протоколу, що містить синхронізацію, керування і повідомлення забезпечує надійну демодуляцію і демодуляцію немовних даних. Мовні пакети приймаються по каналу 502 зв'язку в приймачі 495 і надходять на вхід декодера 390 вокодера, де декодована мова генерується, потім направляється через демультиплексор 320 на процесор вихідного звукового сигналу і динамік 315, генеруючи вихідний сигнал Output Audio S310. Як тільки синхросигнал детектований в сигнал Vocoder Decoder Output S370 за допомогою детектора 350 синхронізації, сигнал Rx De-Mux Control S360 перемикається на тракт даних Rx в Rx демультиплексорі (De-Mux) 320. Пакети вокодера декодуються декодером 390 вокодера і направляються за допомогою Rx De-Mux320 на пристрій 380Rx синхронізації і потім на модем 330 даних Rx. Дані Rx демодулюються за допомогою модему 95590 28 330 даних Rx і направляються на пристрій 301 зворотного форматування повідомлень даних, де вихідні дані Output Data S300 робляться доступними користувачеві або інтерфейсному обладнанню. Приклад прийнятного пристрою 301 зворотного форматування повідомлень даних включає схему для деперемежовування даних S320 повідомлень Rx (Rx Message), здійснює декодування з контролем помилок, таким як гібридний автоматичний запит на повторення (hybrid automatic repeatrequest, HARQ), і обчислює і перевіряє біти циклічного контролю по надмірності (cyclic redundancy check,CRC). Прийнятні вихідні дані S300 (Output Data) можуть включати інформацію користувацького інтерфейсу (user interface,UI), інформацію місцеположення користувача, часові відмітки, інформацію датчика обладнання або інші прийнятні дані. Фіг.15А є відповідною зразковою блок-схемою пристрою 350 детектора синхронізації і керування приймача, зображеного на Фіг.1. Вихідний сигнал S370 декодера вокодера (Decoder Vocoder Output) надходить на детектор 360 пакета синхронізації і детектор 351 преамбули синхронізації. Детектор 360 пакета синхронізації визначає переданий сигнал пакета синхронізації у вихідному сигналі S370 декодера вокодера (Vocoder Decoder Output) і генерує індекс S351 пакета синхронізації (Burst sync index). Детектор 351 преамбули синхронізації визначає переданий вихідний сигнал преамбули синхронізації у вихідному сигналі S370 декодера вокодера (Vocoder Decoder Output) і генерує індекс S353 преамбули синхронізації (Preamble sync index). Сигнали індекс S351 пакета синхронізації і індекс S353 преамбули синхронізації надходять на вхід контролера 370 детектора синхронізації. Контролер 370 детектора синхронізації генерує вихідні сигнали Rx De-Mux Control S360, які спрямовують вихідний сигнал S370 декодера вокодера (Vocoder Decoder Output) в тракт даних S326 або звуковий тракт S325,Audio Mute Control S365, який дозволяє або блокує вихідний звуковий сигнал S310, і сигнал S350 часового зміщення (Timing Offset), який забезпечує інформацію бітової синхронізації пристрою 380Rx синхронізації для вирівнювання Rx Data S326 для демодуляції. Інший приклад прийнятного детектора 350 синхронізації зображений на Фіг.15В. Вихідний сигнал S370 декодера вокодера (Vocoder Decoder Output) надходить в запам'ятовуючий пристрій 352 і детектор 351 преамбули синхронізації. Запам'ятовуючий пристрій 352 використовується для зберігання останніх відліків вихідного сигналу S370 декодера вокодера (Vocoder Decoder Output), який включає прийнятий сигнал Wakeup Out. Прийнятним прикладом запам'ятовуючого пристрою 352 є пам'ять FIFO (First-In-First-Out) або пам'ять RAM (Random Access Memory). Детектор 351 преамбули синхронізації декодує переданий вихідний сигнал преамбули синхронізації на виході S370 декодера вокодера і видає сигнал S305 SyncFlag. Сигнали Modulation Type S306 і SyncFlag S305 надходять на вхід контролера 370 детектора синхронізації. Контролер 370 детектора синхронізації 29 генерує сигнал Modulation Search S307, який використовується для доступу до запам'ятовуючого пристрою 352, пошуку прийнятого сигналу Wakeup Out на основі часового зміщення S350 (Timing Offset) і отримання сигналу Wakeup Out для визначення виду модуляції, що використовується при передачі. Отриманий детектований вид модуляції виводиться із запам'ятовуючого пристрою 352 як сигнал Modulation Type S306. Контролер 370 детектора синхронізації також генерує вихідні сигнали Rx De-Mux Control S360, які спрямовують вихідний сигнал S370 декодера вокодера в тракт даних або звуковий тракт, сигнал Audio Mute Control S365, який дозволяє або блокує вихідний звуковий сигнал S310, і сигнал часового зміщення S350, який забезпечує інформацію бітової синхронізації для пристрою 380 синхронізації Rx для вирівнювання Rx Data S326 для демодуляції. Приклад прийнятного детектора 360 пакета синхронізації зображений на Фіг.16. Вихідний сигнал S370 декодера вокодера надходить в пристрій 361 обчислення потужності. Приклади прийнятного пристрою 361 обчислення потужності включають в себе вхідну функцію зведення в квадрат або функцію абсолютного значення, що обчислюється над вхідним сигналом. Вихідний сигнал S370 декодера вокодера є також вхідним для функцій 362 змішування, де він множиться на синфазну і квадратурну компоненти опорної частотної синусоїди 1363 і частотної синусоїди 2364 для генерації перетворених вниз по частоті компонентів на частоті 0 Гц. Вихідні сигнали пристрою 362 змішування фільтруються за допомогою фільтра нижніх частот LPF365 для усунення високочастотних продуктів множення в змішаному вихідному сигналі. Приклад функції передачі прийнятного фільтра LPF365 має вигляд: IIIIR z c 1 a1z 1 a 2 z 2 , 1 b1z 1 b 2 z 2 де с=0,0554, a1=2, a2=1, b1=-1,9742, b2=0,9744. Амплітуди синфазного і квадратурного вихідних сигналів фільтра LPF 365 обчислюються за допомогою амплітуди 366 і підсумовуються в суматорі 367. Вихідний сигнал суматора 367 надходить в узгоджений фільтр 368, який є узгодженим переданій послідовності пакета синхронізації. Узгоджені фільтри добре відомі в даній галузі техніки. У вихідному сигналі узгодженого фільтра 368 здійснюється пошук максимального піка в пристрої 369 пошуку максимального піка. Як тільки максимум виявлений в пристрої 369 пошуку максимального піка, індекс, що відповідає часовому зміщенню максимуму виводиться в сигналі S351 індексу пакета синхронізації (Burst sync index). Приклад прийнятного детектора 351 преамбули синхронізації зображений на Фіг.17А. Вихідний сигнал S370 декодера вокодера обробляється узгодженим фільтром 368. який погоджений з послідовністю преамбули синхронізації. Вихідний сигнал узгодженого фільтра 368 потім надходить на вхід пристрою 369 пошуку максимального піка, який здійснює пошук максимального піка. Як тільки 95590 30 максимум виявлений в пристрої 369 пошуку максимального піка, індекс, що відповідає часовому зміщенню максимуму виводиться в сигналі S353 індексу преамбули синхронізації (Preamble sync index). Інший приклад прийнятного детектора 351 преамбули синхронізації зображений на Фіг.17В. Вихідний сигнал S370 декодера вокодера обробляється за допомогою фільтра на етапі 452. Прийнятним прикладом фільтра па етапі 452 є sparse фільтр з коефіцієнтами на основі імпульсної характеристики послідовності преамбули, що фільтрується в смузі синхронізації. Фільтр sparse має структуру з кінцевою імпульсною характеристикою з деякими коефіцієнтами, встановленими на нуль, і призводить до зменшення обчислювальної складності на основі меншого числа необхідних помножувачів через нульові коефіцієнти. Sparse фільтри добре відомі в даній галузі техніки. Па етапі 453 у вихідному сигналі фільтра здійснюється пошук максимальних позитивних і негативних кореляційних піків, які узгоджуються з очікуваним шаблоном на основі відстані між негативними і позитивними кореляційними піками. Наприклад, 5 піків повинно бути знайдено на етапі 453 на основі послідовності 245 преамбули синхронізації, 3 позитивних піка відповідають кореляції з PN (pseudorandom noise) послідовністю 243 і 2 негативних піка відповідають кореляції з інвертованою версією PN послідовності 244. У прийнятному прикладі, детектор синхронізації повинен виявити щонайменше 2 піка для того, щоб декларувати, що преамбула синхронізації детектована. На етапі 461, підраховується число детектованих піків, і, якщо більшість піків детектовано, тоді індикаторний прапор синхронізації встановлюється на True на етапі 460, вказуючи на те, що преамбула синхронізації була визначена. Прийнятний приклад більшості детектованих піків дорівнює 4 з 5 піків, які узгоджуються з очікуваним шаблоном. Якщо більшість піків не детектовано, тоді керування переходить на етап 454, де часова відстань між позитивними піками, знайдена на етапі 453, порівнюється з очікуваною відстанню PeakDistT1. Відстань PeakDistT1 встановлюється як функція періоду PN послідовності 242, оскільки фільтрація прийнятої преамбули з PN послідовністю 242 повинна приносити часові відстані між кореляційними піками, яка еквівалентно деякому кратному числу періоду. Якщо часова відстань між позитивними піками виявлена в межах діапазону PeakDistT1, то амплітуди позитивних піків почім порівнюються з порогом PeakAmpT1 на етапі 455. Прийнятний діапазон для PeakDistT1 дорівнює плюс або мінус 2 відліки. Функція PeakAmpT1 є функцією амплітуд попередніх знайдених піків. У прийнятному прикладі, значення PeakAmpT1 встановлюється на таке, щоб піки, знайдені на етапі 453, не відрізнялися по амплітуді більше, ніж на коефіцієнт 3, і, щоб середня пікова амплітуда не перевищувала половини максимального піка амплітуди, що спостерігається до цієї точки. Якщо або перевірка часової відстані позитивних піків на етапі 454 або перевірка амплітуд на етапі 455 невдала, тоді перевіряється часова відстань негативних піків на етапі 456. Якщо 31 95590 часова відстань негативних піків знаходиться в межах діапазону PeakDistT2, тоді амплітуди негативних піків порівнюються з порогом PeakAmpT2 на етапі 457. Прийнятний діапазон для PeakDistT2 дорівнює плюс або мінус 2 відліки. PeakDistT2 встановлюється як функція періоду PN послідовності 242, і PeakAmpT2 встановлюється як функція амплітуд попередніх знайдених піків. Якщо або перевірка часової відстані позитивних піків на етапі 454 і перевірка амплітуд позитивних піків на етапі 455 або перевірка часової відстані негативних піків на етапі 456 і перевірка амплітуд негативних піків на етапі 457 проходить успішно, тоді індикаторний прапор синхронізації встановлюється на True на етапі 460, вказуючи на те, що преамбула синхронізації була визначена. Якщо або перевірка часової відстані негативних піків на етапі 456 або перевірка амплітуд негативних піків на етапі 457 неуспішна, то індикаторний прапор синхронізації встановлюється на False на етапі 458, вказуючи на те, що преамбула синхронізації не була визначена. Повинно бути очевидно, що різні порядки і поєднання етапів призведуть до того ж результату. Наприклад, детектування більшості піків на етапі 461 може здійснюватися після перевірки позитивних піків на етапах 454 і 455. Приклад прийнятного контролера 370 детектора синхронізації зображений на Фіг.18а. Етап 407 є точкою введення в контролер, який ініціалізує буфери пам'яті і конфігурує початковий стан приймача. На етапі 406, тип пошуку синхронізації перевіряється, вказуючи, чи здійснюється пошук синхросигналу в тракті даних Rx або Rx звуковому тракті. Перехід на етап 372 здійснюється, якщо в Rx звуковому тракті здійснюється пошук синхроси 32 гналу. Використовуючи індекс S351 пакета синхронізації, здійснюється пошук максимального пакета синхронізації і індексу на інтервалі декількох кадрів, що обробляються N1 на етапі 372. На етапі 373 визначається, чи відповідає максимальний пакет синхронізації і індекс, знайдений на етапі 372, критерію успішного пошуку. Приклад прийнятного критерію рішення пошуку на етапі 373 має вигляд: Smax max ThSB i is max Nsync Nguard Де Smax max є максимумом пакетів синхронізації, знайдених на інтервалі N1 кадрів, що обробляються, ThSB є порогом детектування пакета синхронізації, is max є індексом максимального пакета синхронізації, NSync є числом кадрів, що обробляються, по яких здійснюється пошук, і Nguard є інтервалом затримки кадрів, що обробляються. Якщо пакет синхронізації не знайдений, то керування переходить назад на етап 406 і пошук повторно запускається. Якщо пакет синхронізації виявлений, то керування переходить на етап 374, де сигнал Audio Mute Control S365 генерується для запобігання подачі сигналу з виходу звукового тракту на динамік. На етапі 375, використовуючи індекс S353 преамбули синхронізації, здійснюється пошук максимальної преамбули синхронізації і індексу на інтервалі декількох кадрів N2, що обробляються. На етапі 376 визначається, чи відповідає максимум преамбули синхронізації і індекс, пошук яких здійснювався на етапі 375, критерію успішного пошуку. Приклад прийнятного критерію рішення пошуку на стані 376 має вигляд: 2 2 c1 S max max / P is max c 2 Zmax max ThPD, де smax max є максимумом пакетів синхронізації, знайдених на інтервалі N1 кадрів, що обробляються, с1 і с2 є коефіцієнтами масштабування, z max max є максимумом вихідних сигналів узгодженого фільтра 368 в детекторі 351 преамбули синхронізації, P(is max) є максимальною потужністю на вході пристрою пошуку максимального піка 369 в детекторі 360 пакета синхронізації при індексі i s max максимального пакета синхронізації. Якщо преамбула синхронізації не знайдена на етапі 376, то керування переходить назад на етап 406 і пошук повторно запускається. Якщо преамбула синхронізації виявлена, то сигнал Rx De-Mux Control S360 генерується на етапі 378 для перемикання па тракт даних Rx в демультиплексорі (DeMux) 320. Керування потім переходить на етап 377, де сигнал S350 часового зміщення обчислюється. Приклад прийнятного обчислення часового зміщення (Timing Offset) має вигляд: TimingOffset ((i zmax - Nsync - 1) Nsamp ) (k max izmax ), де iZmax є індексом при максимумі вихідного сигналу узгодженого фільтра 368 в детекторі 351 преамбули синхронізації на інтервалі одного кадру, NSync є числом кадрів, що обробляються, по яких здійснювався пошук, Nsamp є числом відліків в одному кадрі, і kmax є фазою максимуму вихідного сигналу узгодженого фільтра 368 в детекторі 351 преамбули синхронізації на інтервалі одного кадру. Керування потім переходить на етап 418, де включається доступ до Rx модему 330 через сигнал S354 Rx Modem Enable, потім в результаті переходить назад на етап 406 і пошук повторно запускається. Етап 372а запускається, якщо в тракті даних Rx здійснюється пошук синхросигналу. Етапи 372а, 373а, 375а і 376а функціонують також, як етани 372, 373, 375 і 376 відповідно; основна відмінність полягає в тому, що звуковий тракт не заглушається і De-Mux не перемикається з Rx Audio на Rx data, коли типом пошуку синхронізації, перевіреним на етапі 406, є Rx Data. Інший приклад прийнятного контролера 370 детектора синхронізації зображений на Фіг.18В. Етап 407 є точкою введення в контролер, який ініціалізує буфери пам'яті і конфігурує початковий 33 стан приймача. На етапі 406, вид пошуку синхронізації перевіряється, вказуючи, чи здійснюється пошук синхросигналу в тракті даних (Rx data) або Rx звуковому тракті (Rx Audio). Керування потім переходить на стан 411, де детектор 351 преамбули доступний. На етапі 412 перевіряється сигнал SyncFlag S305, що вказує, що преамбула синхронізації була знайдена, потім це підтверджується за допомогою повторної перевірки на наявність сигналу SyncFlag S305 всього N разів. Прийнятне значення для N дорівнює 1 (тобто, тільки 1 одна преамбула, визначена без підтвердження) для вихідного термінала 600 і 3 для вихідного термінала 100. Якщо преамбула синхронізації виявлена, то сигнал Audio Mute Control S365 генерується для запобігання подачі вихідного сигналу звукового тракту на динамік. Сигнал Rx De-Mux Control S360 потім генерується на етапі 378 для перемикання з Rx звукового тракту на тракт даних Rx в De-Mux320. Керування переходить на етап 377, де сигнал S350 обчислюється. Приклад прийнятного обчислення часового зміщення (Timing Offset) має вигляд: Timing Offset = PulsePosition + PeakDistance PulsePosition є часовою відстанню від позитивного кореляційного піка до першого опорного моменту часу і може бути позитивним або негативним значенням. PeakDistance є часовою відстанню між позитивним кореляційним піком і негативним кореляційним піком. Прикладом прийнятного першого опорного моменту часу може бути конкретна позиція відліку відносно поточного прийнятого мовного кадру. Інший приклад прийнятного обчислення часового зміщення (Timing Offset) має вигляд: Timing Offset = PulsePosition PulsePosition є часовою відстанню від негативного кореляційного піка до другого опорного моменту часу і може мати позитивне або негативне значення. Прикладом прийнятного другого опорного моменту часу може бути конкретна позиція відліку відносно поточного прийнятого мовного кадру. Керування переходить на етап 414, де вигляд модуляції визначається через сигнал S307 пошуку модуляції за допомогою пошуку в запам'ятовуючому пристрої 352 на заздалегідь заданій позиції, де повинен зберігатися прийнятий сигнал Wakeup Out. Керування переходить на етап 418, де Rx модем 330 стає доступним через сигнал Rx Modem Enable S354. Схема демодуляції, що використовується в Rx Modem Enable S354, визначається на етапі 418 за допомогою вхідного сигналу S306 виду модуляції (Modulation Type). Керування в результаті передається назад на етап 406 і пошук повторно запускається. Етап 411а запускається, якщо в тракті даних Rx здійснюється пошук синхросигналу. Етапи 411а і 412а функціонують так само, як етапи 411 і 412 відповідно; основна відмінність полягає в тому, що звуковий тракт не заглушається і De-Mux не перемикається з Rx Audio на Rx data, коли типом пошуку синхронізації, що перевіряється на етапі 406, є Rx Data. Повинно бути очевидно, що різні порядки і поєднання етапів будуть призводити до того ж результату. Наприклад, етап 374 заглушення звукового тракту і етап 95590 34 378 перемикання тракту можуть змінюватися без впливу на весь процес детектування синхронізації. Фіг.19 є прийнятною зразковою блок-схемою пристрою 380 Rx синхронізації, зображеного на Фіг.1. Пристрій 380 Rx синхронізації використовується для вирівнювання межі кадру модуляції у вихідних даних від декодера 390 вокодера так, щоб забезпечити демодуляцію в модемі 330 Rx даних. Сигнал Rx Data S326 надходить на вхід буфера 381, де декілька відліків зберігаються. Прийнятні приклади буфера 381 включають в себе пам'ять FIFO (first-in-first-out) або RAM (random access memory). Відліки від буфера 381 надходять на вхід пристрою 382 змінної затримки, де часова затримка застосовується для вирівнювання межі кадру модуляції, відповідно до сигналу S350 керування часового зміщення (Timing Offset). Відповідна затримка, та, що застосовується в пристрої 382 змінної затримки може бути будь-яким числом відліків від нуля до розміру кадру - 1. Затриманий сигнал виводиться як сигнал Adjusted Rx Data S330. Фіг.20 с прийнятною зразковою блок-схемою модему 330Rx даних, зображеного на Фіг.1. Два сигнали De-Mux Mute S332 і De-Mux Rx Data S333 демультиплексуються у часі із вхідного сигналу Adjusted Rx Data S330 через демультиплексор 331 модему даних Rx. Сигнал De-Mux mute S332 є розділовим або заглушувальним інтервалом, який може існувати між послідовно прийнятими повідомленнями і відділяється від сигналу Adjusted Rx Data S330, якщо сигнал розділення або заглушення був застосований на передавачі. Сигнал DeMux Rx Data S333 є прийнятим модульованим сигналом повідомлень, який надходить на вхід демодулятора 335. Демодулятор 335 демодулює біти інформації прийнятого повідомлення з сигналу Adjusted Rx Data S330. Модем 330Rx даних використовує межу кадру демодуляції, що визначається пристроєм 380 синхронізації Rx і індикатор виду демодуляції, що визначається контролером 370 детектора синхронізації для визначення позиції імпульсу сигналу даних і обчислює символ вихідних даних на основі позиції імпульсу сигналу даних. Прикладом прийнятного демодулятора є корелятор на основі узгодженого фільтра, узгодженого з усіма дозволеними циклічними зсувами форми імпульсу модуляції, що застосовуються модулятором даних, що передаються. Іншим прикладом прийнятного демодулятора є корелятор на основі узгодженого фільтра, узгодженого з фільтрованою в смузі версією імпульсу, що застосовується модулятором даних, що передаються, де смуговий фільтр представляє характеристики передачі каналу. Система Фіг.21 є прикладом випадку використання системи і способів, що розкривається тут. Схема представляє звичайний приклад системи аварійного виклику (emergency call, eCall) всередині автотранспортного засобу. Автотранспортний випадок 950 показаний як випадок між двома автомобілями. Інші прийнятні приклади автотранспортного випадку 950 включають в себе випадок між багатьма автомобілями, випадок з одним ав 35 томобілем, спущена шина одного автомобіля, несправність двигуна або інші ситуації, де несправності автомобіля або користувача вимагають допомоги. Система всередині автомобіля (In-Vehicle System,IVS) 951 розміщується в одному або більше автомобілях, що залучаються до автотранспортного випадку 950, або може розміщуватися на самому користувачі. Система 951 всередині автомобіля 951 може містити вихідний термінал 100, що розглядається тут. Система 951 всередині автомобіля обмінюється даними по радіоканалу, який може містити висхідний канал 501 зв'язку і низхідний канал 502 зв'язку. Запит для передачі даних може бути прийнятий системою всередині автомобіля через канал зв'язку або може автоматично або вручну згенерований системою всередині автомобіля. Бездротова вежа 955 приймає передачу від системи 951 всередині автомобіля і забезпечує інтерфейс з дротовою мережею, що складається з дротової висхідної лінії 962 і дротової низхідної лінії 961. Прийнятним прикладом бездротової вежі 955 є вежа стільникового телефонного зв'язку, що містить антени, приймачіпередавачі і обладнання зворотного транзиту (backhaul), все добре відоме в даній галузі техніки, для забезпечення інтерфейсу з бездротовою висхідною лінією 501 і низхідною лінією 502. Дротова мережа забезпечує. інтерфейс з точкою 960 відповіді суспільної безпеки (Public Safety Answering Point, PSAP), де аварійна інформація, що передається системою всередині автомобіля 951, може бути прийнята, і керування і дані передані. Точка 960 відповіді суспільної безпеки (Public Safety Answering Point, PSAP) може містити термінал 600 призначення, що розглядається тут. Зв'язок між системою всередині автомобіля 951 і точкою 960 відповіді суспільної безпеки (Public Safety Answering Point, PSAP) здійснюється, використовуючи діаграми взаємодії, що розглядаються в наступних розділах. Фіг.22 є прикладом діаграми взаємодії послідовностей передачі даних і синхронізації між вихідним терміналом 100 і терміналом 600 призначення. У цьому прикладі, послідовність 810 передачі висхідної лінії ініціюється терміналом 600 призначення. Послідовність 800 передачі низхідної лінії є передачею повідомлень синхронізації і даних від термінала 600 призначення до вихідного термінала 100, і послідовність 810 передачі висхідної лінії є передачею повідомлень синхронізації і даних від вихідного термінала 100 до термінала 600 призначення. Послідовність 800 передачі низхідної лінії ініціюється в момент часу t0 850 терміналом 600 призначення з послідовністю 801 синхронізації. Прийнятні приклади послідовності 801 синхронізації розглядаються на Фіг.8А, Фіг.8В і Фіг.8С. Слідом за послідовністю 801 синхронізації, термінал 600 призначення передає повідомлення "Start" 802 для подачі команди вихідному терміналу 100 почати передачу послідовності 810 передачі висхідної лінії. Термінал 600 призначення продовжує передавати альтернативне повідомлення 801 синхронізації і повідомлення 802 "Start" і чекає відповіді від вихідного термінала 100. У момент часу t1 851 вихідний термінал 100, приймаючи повідомлення 95590 36 802 "Start" від термінала 600 призначення, починає передачу власної послідовності 811 синхронізації. Прийнятні приклади послідовності 811 синхронізації розглядаються на Фіг.8А, Фіг.8В і Фіг.8С. Слідом за послідовністю 811 синхронізації, вихідний термінал 100 передає мінімальний набір даних (minimum set of data) або "MSD" повідомлення 812 на термінал 600 призначення. Прийнятний приклад даних, що містять MSD повідомлення 812, включає датчик або дані користувача, що форматується за допомогою пристрою 210 форматування повідомлень даних. У момент часу t2 852 термінал 600 призначення, приймаючи повідомлення 811 синхронізації від вихідного термінала 100, починає передачу сигналу негативного підтвердження (negative acknowledgement) або "NACK" повідомлення 803 на вихідний термінал 100. Термінал 600 призначення продовжує передавати альтернативне повідомлення 801 синхронізації і "NACK" повідомлення 803 до успішного прийому MSD повідомлення 812 від вихідного термінала 100. Прийнятний приклад успішного прийому MSD повідомлення 812 включає перевірку циклічного контролю по надмірності, що виконується над MSD повідомленням 812. У момент часу t3 853, термінал 600 призначення, успішно приймаючи MSD повідомлення, починає передачу альтернативного повідомлення 801 синхронізації і повідомлення 804 підтвердження (acknowledge) або "ACK" повідомлення. Вихідним терміналом 100 можуть здійснюватися спроби (Attempt) передати MSD повідомлення 812 декілька разів (813, 814), доки він приймає "ACK" повідомлення 804. У прийнятному прикладі, якщо вихідний термінал 100 намагається передати MSD повідомлення більше ніж 8 разів, причому кожна спроба є різною версією надмірності, то він перемикається на більш надійну схему модуляції, що визначається сигналом S236 Wakeup. Прийнятний приклад більш надійної схеми модуляції включає збільшення тривалості кадру модуляції TMF при забезпеченні сталого числа моментів часу, як описано раніше. У момент часу t4 854 вихідний термінал 100, приймаючи "ACK" повідомлення 804 від термінала 600 призначення перериває передачу MSD повідомлення 814. У прийнятному прикладі, повторна передача запитується терміналом 600 призначення через передачу стартових повідомлень 802 знову після заздалегідь заданого числа "ACK" повідомлень 804, переданих терміналом 600 призначення. Фіг.23А є іншим прикладом діаграми взаємодії послідовностей передачі даних і синхронізації між вихідним терміналом 100 і терміналом 600 призначення. У цьому випадку, послідовність 810 передачі висхідної лінії ініціюється вихідним терміналом 100. Послідовність 810 передачі висхідної лінії ініціюється в момент часу t0 850а вихідним терміналом 100 з мовними даними 815 за допомогою конфігурування основної смуги 200 передачі вихідного термінала 100 на сигнал S225 Тх звукового тракту. У момент часу t1 851а, вихідний термінал 100 конфігурує основну смугу 200 передачі на сигнал S230 тракту даних Тх, і починає передачу його синхропослідовності 811, за якою йде MSD повідомлення 812. У момент часу t2 852а термінал 37 600 призначення, приймаючи повідомлення 811 синхронізації від вихідного термінала 100, починає передачу альтернативного повідомлення 801 синхронізації і "NACK" повідомлення 803 на вихідний термінал 100. Термінал 600 призначення продовжує передавати альтернативне повідомлення 801 синхронізації і "NACK" повідомлення 803 до успішного прийому MSD повідомлення від вихідного термінала 100. У момент часу t3 853, термінал 600 призначення, успішно приймаючи MSD повідомлення 813, починає передачу альтернативного повідомлення 801 синхронізації і підтвердження або "ACK" повідомлення 804. Вихідний термінал 100 може намагатися передати MSD повідомлення 812 декілька разів, доки він приймає "ACK" повідомлення 804, причому кожна спроба є різною версією надмірності. У момент часу t4 854 вихідний термінал 100, приймаючи "ACK" повідомлення 804 від термінала 600 призначення, перериває передачу MSD повідомлення 814. Фіг.23В є іншим прикладом діаграми взаємодії послідовностей передачі даних і синхронізації між вихідним терміналом 100 і терміналом 600 призначення. У цьому випадку, послідовність 810 передачі висхідної лінії ініціюється вихідним терміналом 100. Замість передачі мовних даних по висхідній лінії для ініціації передачі, вихідним терміналом 100 передає альтернативне повідомлення 811 синхронізації і "SEND" повідомлення 805 в момент часу t0 850b. У момент часу t1 851b термінал 600 призначення, приймаючи SEND повідомлення 805 від вихідного термінала 100, передає альтернативне повідомлення 801 синхронізації і "Start" повідомлення 802. У момент часу t2 852b вихідний термінал 100, приймаючи "Start" повідомлення 802 від термінала 600 призначення, передає послідовність 811 синхронізації, за якою йде MSD повідомлення 812, на термінал 600 призначення. У момент часу t3 853b термінал 600 призначення, приймаючи повідомлення 811 синхронізації від вихідного термінала 100, передає альтернативне повідомлення 801 синхронізації і "NACK" повідомлення 803 на вихідний термінал 100. У момент часу t4 854b, термінал 600 призначення, успішно приймаючи MSD повідомлення, передає альтернативне повідомлення 801 синхронізації і "ACK" повідомлення 804. Після прийому "ACK" повідомлення 804 від термінала 600 призначення, вихідний термінал 100 перериває передачу MSD повідомлення. Фіг.24А є прикладом діаграми взаємодії послідовностей передачі даних і синхронізації між вихідним терміналом 100 і терміналом 600 призначення. У цьому випадку, дані запитуються і передаються як вихідним терміналом 100, так і терміналом 600 призначення по висхідній лінії і низхідній лінії відповідно при підтримці двоспрямованої передачі даних. Послідовність 800 передачі висхідної лінії ініціюється в момент часу t0 850 терміналом 600 призначення з альтернативною послідовністю 801 синхронізації і "Start" повідомленням 802. У момент часу t1 851 вихідний термінал 100, приймаючи "Start" повідомлення 802 від термінала 600 призначення, починає передачу власної послідовності 811 синхронізації, за якою 95590 38 йдуть дані 812. У момент часу t2 852, термінал 600 призначення передає альтернативне повідомлення 801 синхронізації і "NACK" повідомлення 803 до успішного прийому даних 812 від вихідного термінала 100, після чого термінал 600 призначення передає альтернативну послідовність 801 синхронізації і "ACK" повідомлення 804. У момент часу t4 854 вихідний термінал 100, приймаючи "ACK" повідомлення 804 від термінала 600 призначення перериває власну передачу даних. У момент часу t5 855, термінал 600 призначення передає альтернативну послідовність 801 синхронізації і "SEND" повідомлення 805, вказуючи запит для передачі даних по низхідній лінії. У момент часу t6 856, вихідний термінал 100 після детектування "SEND" повідомлення 805, відповідає з альтернативною послідовністю 811 синхронізації і "Start" повідомленням 816. У момент часу t7 857, термінал 600 призначення, після детектування "Start" повідомлення 816, відповідає послідовністю 801 синхронізації, за якою йдуть дані 806. У момент часу t8 858, вихідний термінал 100 передає альтернативну послідовність 811 синхронізації і "NACK" повідомлення 817 до успішного прийому даних 806 від термінала 600 призначення, після чого в момент часу t9 859 вихідний термінал 100 передає альтернативну послідовність 811 синхронізації і "ACK" повідомлення 818. У момент часу t10 860 термінал 600 призначення, приймаючи "ACK" повідомлення 818 від вихідного термінала 100 перериває передачу власних даних 806. Фахівець в даній галузі техніки розпізнає, що взаємодії, які розглядаються тут, є симетричними і можуть ініціюватися вихідним терміналом 100. Фахівець в даній галузі техніки також розпізнає, що послідовність синхронізації, Start повідомлення, NACK повідомлення і ACK повідомлення можуть кожне бути в тій же або різних послідовностях між тими, що передаються по низхідній лінії і висхідній лінії повідомленнями. Фіг.24В є іншим прикладом діаграми взаємодії синхронізації і послідовностей передачі даних між вихідним терміналом 100 і терміналом 600 призначення, причому дані запитуються і передаються як вихідним терміналом 100, так і терміналом 600 призначення по висхідній лінії і низхідній лінії відповідно. Відмінність між взаємодіями Фіг.24В і Фіг.24А відбувається в момент часу t3 853. У цьому прикладі, альтернативне повідомлення 801 синхронізації і "SEND" повідомлення 805 передається терміналом 600 призначення замість альтернативного повідомлення синхронізації і "ACK" повідомлення. У цьому прикладі, "SEND" повідомлення 805 служить для індикації того, що термінал 600 призначення успішно прийняв дані 812 вихідного термінали 100 і приводить вихідний термінал 100 до переривання його передачі даних в момент часу t4 854. "SEND" повідомлення також вказує запит від термінала 600 призначення для передачі даних по низхідній лінії. Фіг.25 є прикладом діаграми композиції пакета даних передачі, за допомогою чого довжина користувацьких даних менша, ніж довжина пакета даних передачі. Сегмент 900 користувацьких даних розміщується в пакеті даних передачі 806 або 812 нарівні з попереднім індикатором 910 довжини і 39 наступною послідовністю заповнюючих бітів 911, які служать для заповнення даних до кінця пакета даних передачі. Прийнятним прикладом для довжини індикатора 910 є значення від 1 до 3 байтів, що вказує довжину сегмента користувацьких даних 900. Прийнятним прикладом довжини 806 або 812 пакета даних передачі може бути 100-200 байтів. Прийнятний приклад заповнюючих бітів 911 включає двійкове значення "0". Фахівець в даній галузі техніки розпізнає, що заповнюючі біти 911 можуть містити двійкове "1" значення або можуть містити шаблон двійкових "1" і "0"значень. Фіг.26 є прикладом діаграми композиції пакета даних передачі, за допомогою чого довжина користувацьких даних більша, ніж довжина пакета даних передачі. Користувацькі дані 900 діляться на декілька сегментів так, що перший сегмент плюс довжина індикатора дорівнює довжині пакета даних передачі, і довжина подальших сегментів дорівнює довжині пакета даних передачі. Якщо користувацькі дані не є цілим числом, кратним довжині пакета даних передачі, тоді останній сегмент містить заповнення. У прикладі Фіг.26, користувацькі дані діляться на два сегменти. Перший сегмент користувацьких даних 901 розміщується в пакеті даних передачі 806 або 812 нарівні з попереднім індикатором 910 довжини. Другий сегмент користувацьких даних 902 розміщується в пакеті даних передачі 806 або 812, і оскільки сегмент менший, ніж довжина пакета даних передачі, заповнення 911 використовується для заповнення даних до кінця пакета даних передачі. Фіг.27A є прикладом діаграми взаємодії послідовності запиту даних передачі і послідовності відповіді даних передачі, причому довжина користувацьких даних більша, ніж розмір пакета передачі. Ініційований Start повідомленнями запитуючого термінала або в низхідній лінії 800 передачі або висхідній лінії 810 передачі, в момент часу t20 870, перший пакет 806 або 812 даних передачі, що містить індикатор 910 довжини і перший сегмент 901 користувацьких даних, передасться терміналом, що відповідає. У момент часу t21 871, оскільки термінал, що відповідає ще не прийняв ACK повідомлення, він знову починає передачу користувацьких даних у другій спробі 903. У момент часу t22 872, термінал що відповідає, приймаючи ACK повідомлення, перериває передачу першого пакета 806 або 812 даних. У момент часу t23 873, запитуючий термінал, після отримання довжини індикатора 910 для визначення кількості очікуваних сегментів, запитує наступний пакет 806 або 812 даних передачі передачею стартових (start) повідомлень на термінал, що відповідає. У момент часу t24 874, термінал, що відповідає, приймаючи start повідомлення від запитуючого термінала, починає передачу наступного пакета 806 або 812 даних передачі, що містить наступний сегмент 902 користувацьких даних і заповнення 911 (в цьому прикладі наступний пакет даних передачі є останнім пакетом даних). У момент часу t25 875, термінал, що відповідає, приймаючи ACK повідомлення, перериває власну передачу даних. Фахівець в даній галузі техніки розпізнає, що взаємодії, що розглядаються тут, є симетричними, за допомогою 95590 40 чого запитуючий і той, що відповідає, термінали можуть бути або вихідним терміналом 100 або терміналом 600 призначення. Фахівець в даній галузі техніки також розпізнає, що користувацькі дані можуть охоплювати більше, ніж два пакети 806 або 812 даних передачі. Фіг.27В є іншим прикладом діаграми взаємодії послідовності запиту даних передачі і послідовності відповіді даних передачі, причому довжина користувацьких даних більша, ніж розмір пакета передачі. У цьому прикладі, після того, як перший пакет 806 або 812 даних передачі запитується через Start повідомлення, що передаються запитуючим терміналом, послідовні пакети 806 або 812 даних передачі автоматично передаються терміналом, що відповідає, на основі прийому ACK повідомлення від запитуючого термінала. У цьому прикладі, запитуючий термінал не передає Start повідомлення для ініціації передачі подальшого пакета 806 або 812 даних передачі від термінала, який відповідає. У момент часу t31 881, термінал, що відповідає, приймаючи ACK повідомлення, перериває передачу першого пакета даних, потім відразу починає передачу наступного пакета 806 або 812 даних передачі, що розділяються тільки синхропослідовністю. У момент часу t32 882, запитуючий термінал, приймаючи синхропослідовність, починає передачу NACK повідомлень до успішного прийому пакета 806 або 812 даних передачі. У момент часу t33 883, успішно приймаючи пакет 806 або 812 даних передачі, запитуючий термінал починає передачу ACK повідомлень. У момент часу t34 884 термінал, який відповідає, приймаючи ACK повідомлення, перериває передачу пакета 806 або 812 даних передачі. Фіг.27С є ще одним прикладом діаграми взаємодії послідовності запиту даних передачі і послідовності відповіді даних передачі, причому довжина користувацьких даних більша, ніж розмір пакета передачі. У цьому прикладі, після того, як перший пакет 806 або 812 даних передачі запитується через Start повідомлення, що передаються запитуючим терміналом, послідовні пакети 806 або 812 даних передачі автоматично передаються терміналом, який відповідає, на основі прийому ACK повідомлення від запитуючого термінала. У цьому прикладі, ні запитуючий термінал не передає Start повідомлення для ініціація передачі пакета 806 або 812 даних передачі від термінала, який відповідає, на запитуючий термінал передає NACK повідомлення. У момент часу t41 891 термінал, який відповідає, приймаючи ACK повідомлення, перериває передачу першого пакета даних, потім відразу починає передачу наступного пакета 806 або 812 даних передачі, що розділяються тільки синхропослідовністю. У момент часу t42 892, успішно приймаючи пакет 806 або 812 даних передачі, запитуючий термінал починає передачу ACK повідомлень. Як тільки термінал. який відповідає, приймає ACK повідомлення, він перериває передачу пакета 806 або 812 даних передачі. Фіг.27D с ще одним прикладом діаграми взаємодії послідовності запиту даних передачі і послідовності відповіді даних передачі, причому довжина користувацьких даних більша, ніж розмір пакета 41 передачі. Фіг.27D є альтернативою прикладу діаграми взаємодії, зображеному на Фіг.27В. В прикладі Фіг.27D, часовий інтервал в момент часу t32 882 між ACK повідомленням запитуючого термінала для першого сегмента 903 користувацьких даних і NACK для наступного сегмента 902 користувацьких даних виключається. Це допомагає забезпечити синхронізацію на терміналі, який відповідає, так, що не буде необхідності повторної синхронізації з послідовністю синхронізації запитуючого термінала. Фахівець в даній галузі техніки розпізнає, що термінали, які відповідають, можуть автоматично передавати пакети даних послідовно першому пакету даних без передачі відокремлювальної синхропослідовності. У цьому випадку синхропослідовність передається один раз перед першим пакетом 806 або 812 даних передачі, потім після прийому ACK повідомлень термінал, що відповідає, автоматично передає подальший пакет даних без передачі синхронізації. Фахівець в даній галузі техніки також розпізнає, що індикатор 910 довжини може також передаватися з іншими сегментами даних в доповнення до першого. На діаграмах взаємодій, що розкриваються тут, можуть бути умови помилок, на які повинні бути отримані відповіді і, які повинні бути оброблені заздалегідь заданим способом. У наступних розділах надаються приклади по обробці умов помилок, які відповідають діаграмам взаємодій, що розкриваються тут. У кожному прикладі, умова помилки заявляється нарівні з відповідним описом відповіді. Фахівець в даній галузі техніки розпізнає, що обробка помилок, яка розглядається тут, може рівним чином застосовуватися до вихідного термінала або термінала призначення як в односпрямованому, так і двоспрямованому варіантах здійснення. Приклад умови помилки відбувається, коли вихідний термінал не декодує передану преамбулу синхронізації. У прикладі відповіді, вихідний термінал затримує передачу MSD повідомлення, доки заздалегідь задане число преамбул синхронізації не буде детектовано. Інший приклад умови помилки відбувається, коли вихідний термінал неправильно декодує преамбулу синхронізації. У прикладі відповіді, вихідний термінал затримує передачу MSD повідомлення, доки заздалегідь задане число детектованих преамбул синхронізації принесуть зміщення того ж відліку. Інший приклад умови помилки відбувається, коли вихідний термінал неправильно декодує преамбулу синхронізації, хоча насправді преамбула не передавалася. У прикладі відповіді, вихідний термінал ігнорує неправильно детектовані преамбули синхронізації. Вихідний термінал буде тільки запускати MSD передачу, якщо заздалегідь задане число детектованих преамбул синхронізації принесуть оцінку зміщення того ж відліку. Інший приклад умови помилки відбувається, коли вихідний термінал не декодує передану преамбулу синхронізації. У прикладі відповіді, вихідний термінал не починає декодування MSD повідомлення, але продовжує передачу START 95590 42 повідомлень як для запуску вихідним терміналом для повторної ініціація MSD передачі після того прийому заздалегідь заданого числа START повідомлень (включаючи преамбулу синхронізації послідовності). Інший приклад умови помилки відбувається, коли вихідний термінал неправильно декодує преамбулу синхронізації. У прикладі відповіді, вихідний термінал декодує прийняті MSD дані неправильно протягом всіх версій надмірності. На основі неправильно декодованих даних, вихідний термінал може повторно ініціювати MSD передачу за допомогою передачі START повідомлень на вихідний термінал. Інший приклад умови помилки відбувається, коли вихідний термінал неправильно декодує преамбулу синхронізації, хоча насправді преамбула не передавалася. Відповіді немає, оскільки імовірність цієї події дуже невелика. Вихідний термінал не починає спостерігання його прийнятого сигналу, доки він чекає преамбулу синхронізації від вихідного термінала. Інший приклад умови помилки відбувається, коли вихідний термінал неправильно інтерпретує START повідомлення як NACK повідомлення. У прикладі відповіді, якщо MSD передача не почалася, вихідний термінал затримує MSD передачу, доки він не прийме START повідомлення. У іншому прикладі відповіді, якщо MSD передача продовжується, вихідний термінал затримує повторну ініціалізацію передачі. Інший приклад умови помилки відбувається, коли вихідний термінал неправильно інтерпретує START повідомлення як ACK повідомлення. У прикладі відповіді, якщо MSD передача не почалася, вихідний термінал ігнорує будь-яке ACK повідомлення. У іншому прикладі відповіді, вихідний термінал ігнорує ACK повідомлення, якщо попередні повідомлення були інтерпретовані як START повідомлення. У ще одному прикладі відповіді, якщо попередні повідомлення були NACK повідомленнями, вихідний термінал самостійно припиняє роботу і завершує MSD передачу, якщо наступне повідомлення також інтерпретується як ACK. У ще одному прикладі відповіді, якщо попередні повідомлення інтерпретувалися як ACK, то вихідний термінал завершує MSD передачу помилково. Імовірність цієї події низька, однак, якщо вона відбувається, то вихідний термінал може знову повторно ініціювати передачу за допомогою запиту передачі з START повідомленнями. Інший приклад умови помилки відбувається, коли вихідним терміналом неправильно інтерпретується NACK повідомлення як START повідомлення. У прикладі відповіді, одне повідомлення NACK, яке інтерпретується як START, ніяк не впливає на MSD передачу. У іншому прикладі відповіді, серії NACK повідомлень, які всі інтерпретуються як START повідомлення, можуть викликати передавач вихідного термінала для повторної ініціації MSD. Вихідний термінал не буде цього чекати і пропустить прийом даних, що надходять, вважаючи їх неправильно декодованими даними. На основі неправильно декодованих даних, термінал призначення може запитати вихідний термінал для 43 повторної ініціації передачі за допомогою передачі START повідомлень. Інший приклад умови помилки відбувається, коли вихідним терміналом неправильно інтерпретується NACK повідомлення як ACK повідомлення. У прикладі відповіді, якщо попереднє повідомлення інтерпретувалося як START повідомлення, то вихідний термінал ігнорує будь-яке ACK повідомлення. У іншому прикладі відповіді, якщо попереднє повідомлення інтерпретувалося як NACK повідомлення, вихідний термінал чекає іншого повідомлення ACK. Якщо наступне повідомлення не є іншим повідомленням ACK, то поточне повідомлення ACK ігнорується. У ще одному прикладі відповіді, якщо попереднє повідомлення також було помилково детектовано як ACK повідомлення, вихідний термінал може завершити MSD передачу, хоча вихідний термінал ще не прийняв MSD правильно. Імовірність цієї події низька, однак, якщо вона відбувається, вихідний термінал може знову повторно ініціювати передачу за допомогою передачі запиту із START повідомленнями. Інший приклад умови помилки відбувається, коли вихідний термінал неправильно інтерпретує ACK повідомлення як START повідомлення. У прикладі відповіді, вихідний термінал не відмінить передачу додаткових версій надмірності MSD, оскільки звичайною умовою скасування є прийом заздалегідь заданого числа ACK повідомлень. Якщо більше подальших повідомлень інтерпретуються як START повідомлення, вихідний термінал може повторно ініціювати MSD передачу. У результаті, вихідний термінал зупинить передачу повідомлень. Вихідний термінал в результаті визначить, що термінал призначення більше не передає синхрокадри і здійснить самостійно скидання, тим самим зупиняючи подальші передачі. Інший приклад умови помилки відбувається, коли вихідний термінал неправильно інтерпретує ACK повідомлення як NACK повідомлення. У прикладі відповіді, вихідний термінал буде продовжувати передачу версій надмірності, доки ACK повідомлення не будуть правильно детектовані. У результаті, термінал призначення зупинить передачу повідомлень. Вихідний термінал в результаті визначить, що термінал призначення більше не передає синхрокадри і здійснює самостійне скидання, тим самим зупиняючи подальші передачі. Інший приклад умови помилки відбувається, коли вихідний термінал визначає, що прийняте повідомлення є ненадійним. У прикладі відповіді, якщо прийняті повідомлення є START повідомленнями, вихідний термінал продовжує рахувати ненадійні повідомлення, але з меншим ваговим коефіцієнтом, ніж повідомлення, які були прийняті з визначенням як надійні. Подальший запуск події на основі підрахунку прийнятих повідомлень забажає більше заздалегідь визначене число ненадійних повідомлень прийнятих проти, якщо повідомлення були прийняті з визначенням як надійні. У іншому прикладі відповіді, якщо ненадійні прийняті повідомлення є NACK повідомленнями або ACK повідомленнями, то вихідний термінал може ігнорувати ці повідомлення. 95590 44 Інший приклад умови помилки відбувається, коли вихідний термінал не може детектувати передане повідомлення MSD через шум або інші спотворення в каналі. У прикладі відповіді, після спроби декодування заздалегідь заданого числа версій надмірності, термінал призначення може запитати вихідний термінал повторно ініціювати передачу за допомогою передачі START повідомлень. При повторно ініційованій передачі, вихідний термінал може використати надійний модулятор, який менш схильний до шуму і інших спотворень в каналі. Інший приклад умови помилки відбувається, коли вихідний термінал не може отримати пробуджуючий сигнал правильно. У прикладі відповіді, якщо вихідний термінал розглядає детектування пробуджуючого сигналу ненадійним, то він вибирає швидкий (або нормальний) режим модуляції для першої проби демодуляції MSD даних. Для будь-якого іншого набору заздалегідь заданого числа прийнятих версій надмірності MSD даних, вихідний термінал може використати надійний режим модуляції для демодуляції даних. Таким чином, тут розкривається пристрій і спосіб надійної і ефективної передачі даних в смузі через мовний кодек в бездротовій системі зв'язку. Фахівці в даній галузі техніки зрозуміють, що інформація і сигнали можуть бути представлені, використовуючи будь-яку різноманітність різних технологій і способів. Наприклад, дані, інструкції, команди, інформація, сигнали, біти і символи, на які можуть бути посилання протягом приведеного вище опису, можуть бути представлені напругами, струмами, електромагнітними хвилями, магнітними полями або частинками, оптичними полями або частинками або будь-яким їх поєднанням. Також, хоча варіанти здійснення передусім розглядаються в термінах бездротової системи зв'язку, розглянуті технології можуть бути застосовані до інших систем внутрішньосмугової передачі даних, які є фіксованими (не портативними) або не використовують радіоканал. Фахівцям буде додатково очевидно, що різні ілюстративні логічні блоки, модулі, схеми і етапи алгоритмів, що розглядаються в зв'язку з варіантами здійснення, які розкриваються тут, можуть здійснюватися як електронне обладнання, комп'ютерне програмне забезпечення або їх поєднання. Для чіткої ілюстрації цієї взаємозамінності обладнання і програмного забезпечення, різні ілюстративні компоненти, блоки, модулі і етапи були розглянуті вище в загальному в термінах їх функцій. Реалізація таких функцій як обладнання або програмне забезпечення залежить від конкретного застосування і обставин розробки, що накладається на всю систему. Фахівці в даній галузі техніки можуть реалізовувати розглянуті функції різним чином для кожного конкретного застосування, але такі рішення здійснення не повинні інтерпретуватися як такі, що викликають відхилення від галузі даного винаходу. Різні ілюстративні логічні блоки, модулі і схеми, що розглядаються в зв'язку з варіантами здійснення, які розкриваються тут, можуть здійснюватися або виконуватися за допомогою процесора 45 загального призначення, цифрового сигнального процесора (digital signal processor, DSP), інтегральної схеми для конкретного додатку (application specific integrated scheme, ASIC), програмованої вентильної матриці (field programmable gate array,FPGA) або іншого програмованого логічного пристрою, дискретної вентильної або транзисторної логіки, дискретних апаратних компонентів або будь-яких їх поєднань, розроблених для виконання функцій, що розглядаються тут. Процесор загального призначення може бути мікропроцесором, але альтернативно, процесор може бути традиційним процесором, контролером, мікроконтролером або кінцевим автоматом. Процесор може також здійснюватися як поєднання обчислювальних пристроїв, наприклад, поєднання DSP і мікропроцесора, множини мікропроцесорів, одного або більше мікропроцесорів в зв'язку з ядром DSP або будьяка інша така конфігурація. Етапи способів або алгоритмів, що розглядаються в зв'язку з варіантами здійснення, що розкриваються тут, можуть здійснюватися напряму в апаратурі, в програмному модулі, що виконується процесором, або в поєднанні цих двох. Програмний модуль може розміщуватися в пам'яті RAM, 95590 46 флеш-пам'яті, пам'яті ROM, пам'яті EPROM, пам'яті EEPROM, регістрах, жорсткому диску, змінному диску, CDROM або будь-якій іншій формі носія інформації, відомого в даній галузі техніки. Носій інформації зв'язується з процесором так, що процесор може зчитувати інформацію з і записувати інформацію на носій інформації. Альтернативно, носій інформації може бути одним цілим з процесором. Процесор і носій інформації можуть розміщуватися в ASIC. Альтернативно, процесор і носій інформації можуть розміщуватися як дискретні компоненти в користувацькому терміналі. Попередній опис варіантів здійснення, що розкриваються, надається, щоб дозволити будь-якому фахівцеві в даній галузі техніки виготувати або використовувати даній винахід. Різні модифікації для цих варіантів здійснення будуть легко зрозумілі фахівцям в даній галузі техніки, і загальні принципи, визначені тут, можуть застосовуватися до інших варіантів здійснення без відхилення від ідеї або галузі винаходу. Таким чином, даній винахід не призначений для обмеження варіантами здійснення, показаними тут, але, щоб відповідати найбільш широкій галузі, що відповідає принципам і новим властивостям, які розкриваються тут. 47 95590 48 49 95590 50 51 95590 52 53 95590 54 55 95590 56 57 95590 58 59 95590 60
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem and method of an in-band modem for data communications over digital wireless communication networks
Автори англійськоюPietsch, Christian, Frank, Georg, Sgraja, Christian, Huang, Pengjun, Joetten, Christoph, A., Werner, Marc, W., Granzow, Wolfgang
Назва патенту російськоюСистема и способ внутриполосного модема для передачи данных по сетям цифровой беспроводной связи
Автори російськоюПич Кристиан, Франк Георг, Сграя Кристиан, Хуан Пенцзюнь, Йоеттен Кристоф А., Вернер Марк В., Гранцов Вольфганг
МПК / Мітки
МПК: H04J 3/06, H04L 1/00, H04L 19/00, H04L 25/49
Мітки: зв'язку, модема, цифрового, передач, система, даних, спосіб, бездротового, внутрішньосмугового, мережах
Код посилання
<a href="https://ua.patents.su/38-95590-sistema-i-sposib-vnutrishnosmugovogo-modema-dlya-peredach-danikh-po-merezhakh-cifrovogo-bezdrotovogo-zvyazku.html" target="_blank" rel="follow" title="База патентів України">Система і спосіб внутрішньосмугового модема для передач даних по мережах цифрового бездротового зв’язку</a>
Спосіб передавання телевізійних програм та інших даних (варіанти), приймач-декодер цифрового телебачення (варіанти), система зв’язку й передавання цифрового телебачення (варіанти), система передавання цифрового
Номер патенту: 65565
Опубліковано: 15.04.2004
Автори: Агас Бернар, Деклерк Крістоф, Янг Руі Лянг, Фюре Тьєррі, Молі Жак, Фрезаль-Гюгоне Клер, Ляо Хонгтао
МПК: H04N 5/44, H04N 7/173
Мітки: приймач-декодер, цифрового, варіанти, система, зв'язку, спосіб, інших, програм, даних, телевізійних, передавання, телебачення
Формула / Реферат:
1. Спосіб передавання телевізійних програм та інших даних, який включає такі операції:в системі передавання:передавання потоку цифрових даних, що містить щонайменше одну телевізійну програму;у приймачі-декодері користувача:приймання потоку цифрових даних;в телевізійному режимі:виділення телевізійної програми з потоку цифрових даних; і видавання виділеної телевізійної програми в телевізор; і в режимі...
Система та спосіб передачі цифрового відеосигналу та даних через канал зв’язку
Номер патенту: 57812
Опубліковано: 15.07.2003
Автори: Батлер Уільям У., Клаймек Девід Л., Данн Брайєн У., Страйк Тімоті М., Коллінз Дональд Дж., Ешлеман Метью А., Бохландер Рональд А.
МПК: H04N 7/173, H04N 7/10
Мітки: відеосигналу, канал, спосіб, зв'язку, передачі, система, даних, цифрового
Формула / Реферат:
1. Система для доставки цифрового відео і даних через один комунікаційний канал, що включає центральну станцію, місця зберігання та засоби доставки інформаційного матеріалу, на який надійшов запит, до користувача, яка відрізняється тим, що вона включає програмний центр, сконфігурований для прийому множини відеосигналів, які представляють множину відеопрограм, при цьому вищезгаданий програмний центр також сконфігурований для обробки принаймні...
Спосіб керування доступом станції даних до мобільних носіїв даних, мобільний носій даних, станція даних і система для здійснення способу
Номер патенту: 46781
Опубліковано: 17.06.2002
Автор: Райнер Роберт
МПК: H04L 12/407, G06K 7/00, G06K 19/07, G06K 17/00
Мітки: станція, система, способу, спосіб, керування, даних, здійснення, мобільній, носій, носіїв, станції, мобільних, доступом
Формула / Реферат:
1. Спосіб керування доступом станції даних (61) до щонайменше двох мобільних носіїв даних (51), при якому ці носії даних на вимогу станції даних синхронно передають свої ідентифікаційні номери, і станція даних визначає, чи приймаються щонайменше в одному двійковому розряді прийнятих ідентифікаційних номерів два різних значення біта, і потім, якщо принаймні в одному двійковому розряді прийнятих ідентифікаційних номерів будуть визначені як...
Спосіб обробки даних у приймальній апаратурі, що використовується в системі бездротового зв’язку (варіанти), та приймальна апаратура для обробки даних в системі бездротового зв’язку (варіанти)
Номер патенту: 82687
Опубліковано: 12.05.2008
Автори: Йі Сеунг-Джун, Лі Йонг-Дае, Чун Сунг-Дак
МПК: H03M 13/09
Мітки: обробки, приймальний, бездротового, приймальна, зв'язку, апаратури, апаратура, даних, спосіб, використовується, варіанти, системі
Формула / Реферат:
1. Спосіб обробки даних у приймальній апаратурі, що використовується в системі бездротового зв'язку, де приймальна апаратура включає рівень керування доступом до середовища (МАС рівень) та рівень контролю радіоканалу (RLC рівень) для обробки блоків даних, у якому:передають блок даних та результат перевірки циклічного надлишкового коду (CRC),пов'язаний з блоком даних, з МАС рівня до RLC рівня;визначають в RLC рівні, чи...
Спосіб передачі даних у системі швидкісного бездротового широкосмугового доступу
Номер патенту: 26552
Опубліковано: 25.09.2007
Автори: Севергін Борис Миколайович, Самілло Сергій Георгійович, Семенюк Ілля Дмитрович, Савастьянов Володимир Анатолійович, Іванов Валерій Миколайович, Івашкевич Віктор Григорович, Смаженко Олексій Леонідович, Філатов Юрій Олександрович, Савастьянов Володимир Володимирович, Потієнко Валерій Петрович, Могильний Олександр Іванович
МПК: H04L 29/02
Мітки: швидкісного, даних, системі, широкосмугового, доступу, передачі, бездротового, спосіб
Формула / Реферат:
1. Спосіб передачі даних у системі швидкісного бездротового широкосмугового доступу, що включає скремблювання та завадостійке кодування потоку від абонента, модуляцію та обробку сигналу у модуляторах та передавачах абонентської станції, агрегацію таких потоків за допомогою мультиплексора абонентської станції з селектором поляризації та випромінювання його у напрямку базової станції через антену, де сигнал, що надійшов через приймальну антену...
Попередній патент: Гідрофобізуюча композиція
Наступний патент: Кристалізатор для розливання металу
Випадковий патент: Пристрій для моделювання різання