Пристрій контролю швидкості руху електрифікованих видів транспорту
Номер патенту: 100019
Опубліковано: 10.07.2015
Автори: Чорна Вікторія Олегівна, Дебелий Володимир Леонідович, Гузов Едуард Семенович, Сінчук Олег Миколайович, Сінчук Ігор Олегович, Дебелий Леонід Леонідович
Формула / Реферат
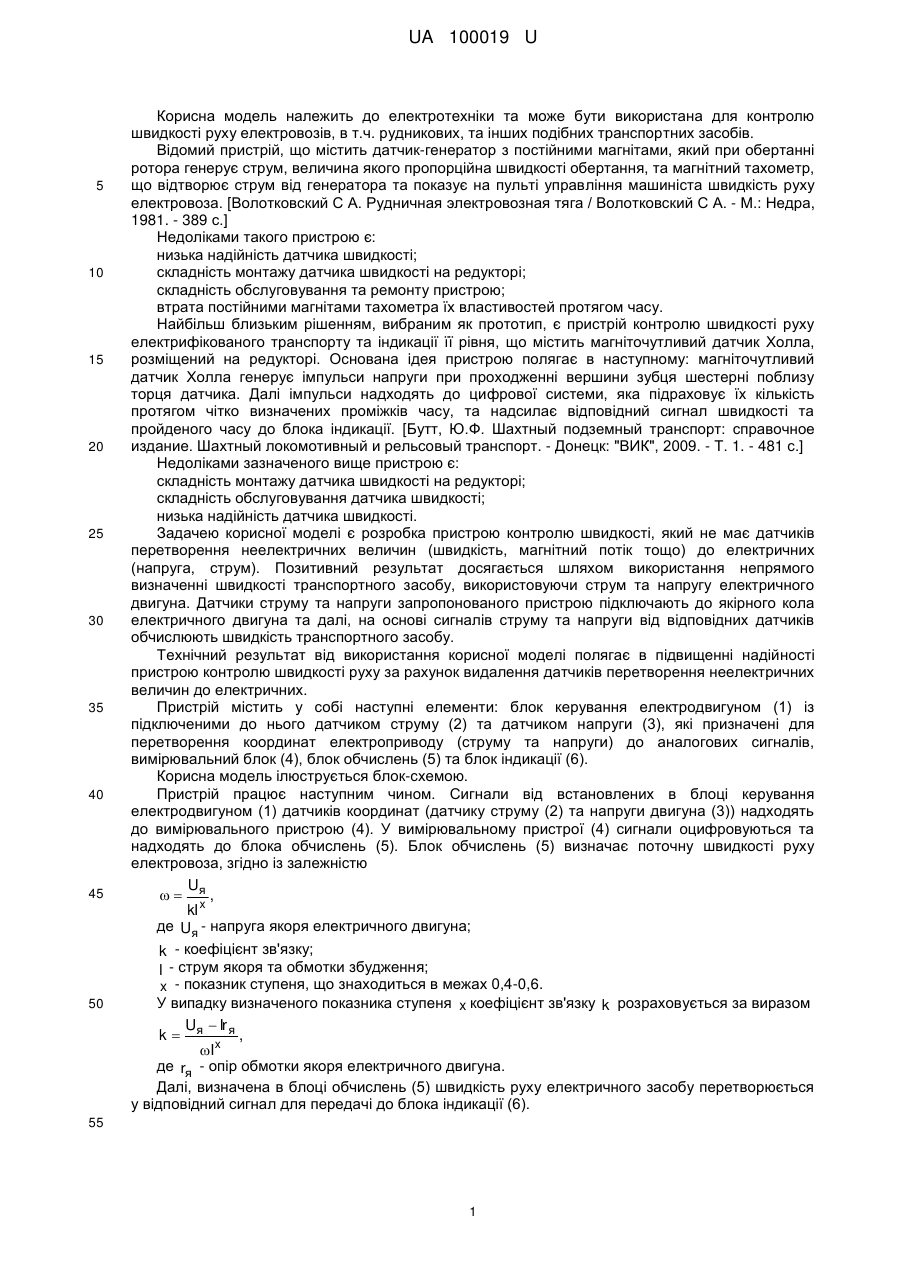
Пристрій контролю швидкості руху електрифікованих видів транспорту, що містить датчики координат електропривода, які встановлено в блоці керування електродвигуном та поєднано із блоком виміру, з'єднаного із блоком обчислень, який у свою чергу підключений до блока індикації, який відрізняється тим, що як датчики координат електропривода використовуються датчик струму та датчик напруги електродвигуна, які є паралельно з'єднаними із блоком виміру, який у свою чергу підключено до блока обчислення із можливістю непрямого визначення швидкості транспортного засобу за формулою:
![]()
де ![]() - швидкість транспортного засобу;
- швидкість транспортного засобу;
![]() - напруга якоря електричного двигуна;
- напруга якоря електричного двигуна;
![]() - коефіцієнт зв'язку;
- коефіцієнт зв'язку;
![]() - струм якоря та обмотки збудження;
- струм якоря та обмотки збудження;
![]() - показник ступеня, що знаходиться в межах 0,4-0,6.
- показник ступеня, що знаходиться в межах 0,4-0,6.
Текст
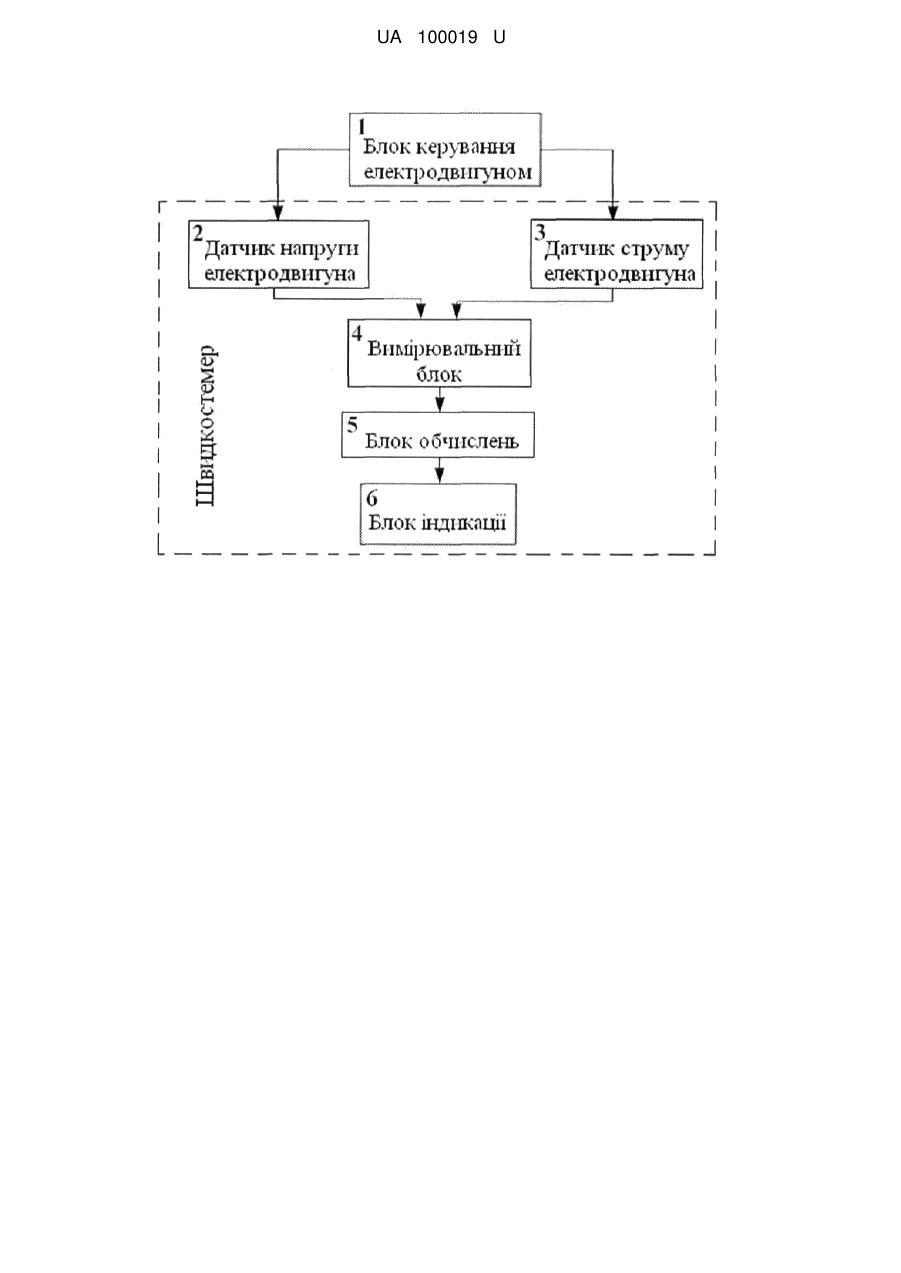
Реферат: Пристрій контролю швидкості руху електрифікованих видів транспорту містить датчики координат електропривода, які встановлено в блоці керування електродвигуном та поєднано із блоком виміру, з'єднаного із блоком обчислень, який у свою чергу підключений до блока індикації. Як датчики координат електропривода використовуються датчик струму та датчик напруги електродвигуна, які є паралельно з'єднаними із блоком виміру, який у свою чергу підключено до блока обчислення із можливістю непрямого визначення швидкості транспортного засобу за формулою: U я, kI x де - швидкість транспортного засобу; Uя - напруга якоря електричного двигуна; k - коефіцієнт зв'язку; I - струм якоря та обмотки збудження; x - показник ступеня, що знаходиться в межах 0,4-0,6. UA 100019 U (12) UA 100019 U UA 100019 U 5 10 15 20 25 30 35 40 45 50 Корисна модель належить до електротехніки та може бути використана для контролю швидкості руху електровозів, в т.ч. рудникових, та інших подібних транспортних засобів. Відомий пристрій, що містить датчик-генератор з постійними магнітами, який при обертанні ротора генерує струм, величина якого пропорційна швидкості обертання, та магнітний тахометр, що відтворює струм від генератора та показує на пульті управління машиніста швидкість руху електровоза. [Волотковский С А. Рудничная электровозная тяга / Волотковский С А. - М.: Недра, 1981. - 389 с.] Недоліками такого пристрою є: низька надійність датчика швидкості; складність монтажу датчика швидкості на редукторі; складність обслуговування та ремонту пристрою; втрата постійними магнітами тахометра їх властивостей протягом часу. Найбільш близьким рішенням, вибраним як прототип, є пристрій контролю швидкості руху електрифікованого транспорту та індикації її рівня, що містить магніточутливий датчик Холла, розміщений на редукторі. Основана ідея пристрою полягає в наступному: магніточутливий датчик Холла генерує імпульси напруги при проходженні вершини зубця шестерні поблизу торця датчика. Далі імпульси надходять до цифрової системи, яка підраховує їх кількість протягом чітко визначених проміжків часу, та надсилає відповідний сигнал швидкості та пройденого часу до блока індикації. [Бутт, Ю.Ф. Шахтный подземный транспорт: справочное издание. Шахтный локомотивный и рельсовый транспорт. - Донецк: "ВИК", 2009. - Т. 1. - 481 с.] Недоліками зазначеного вище пристрою є: складність монтажу датчика швидкості на редукторі; складність обслуговування датчика швидкості; низька надійність датчика швидкості. Задачею корисної моделі є розробка пристрою контролю швидкості, який не має датчиків перетворення неелектричних величин (швидкість, магнітний потік тощо) до електричних (напруга, струм). Позитивний результат досягається шляхом використання непрямого визначенні швидкості транспортного засобу, використовуючи струм та напругу електричного двигуна. Датчики струму та напруги запропонованого пристрою підключають до якірного кола електричного двигуна та далі, на основі сигналів струму та напруги від відповідних датчиків обчислюють швидкість транспортного засобу. Технічний результат від використання корисної моделі полягає в підвищенні надійності пристрою контролю швидкості руху за рахунок видалення датчиків перетворення неелектричних величин до електричних. Пристрій містить у собі наступні елементи: блок керування електродвигуном (1) із підключеними до нього датчиком струму (2) та датчиком напруги (3), які призначені для перетворення координат електроприводу (струму та напруги) до аналогових сигналів, вимірювальний блок (4), блок обчислень (5) та блок індикації (6). Корисна модель ілюструється блок-схемою. Пристрій працює наступним чином. Сигнали від встановлених в блоці керування електродвигуном (1) датчиків координат (датчику струму (2) та напруги двигуна (3)) надходять до вимірювального пристрою (4). У вимірювальному пристрої (4) сигнали оцифровуються та надходять до блока обчислень (5). Блок обчислень (5) визначає поточну швидкості руху електровоза, згідно із залежністю U я, kI x де Uя - напруга якоря електричного двигуна; k - коефіцієнт зв'язку; I - струм якоря та обмотки збудження; x - показник ступеня, що знаходиться в межах 0,4-0,6. У випадку визначеного показника ступеня x коефіцієнт зв'язку k розраховується за виразом U Ir я k я , Ix де rя - опір обмотки якоря електричного двигуна. Далі, визначена в блоці обчислень (5) швидкість руху електричного засобу перетворюється у відповідний сигнал для передачі до блока індикації (6). 55 1 UA 100019 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 15 Пристрій контролю швидкості руху електрифікованих видів транспорту, що містить датчики координат електропривода, які встановлено в блоці керування електродвигуном та поєднано із блоком виміру, з'єднаного із блоком обчислень, який у свою чергу підключений до блока індикації, який відрізняється тим, що як датчики координат електропривода використовуються датчик струму та датчик напруги електродвигуна, які є паралельно з'єднаними із блоком виміру, який у свою чергу підключено до блока обчислення із можливістю непрямого визначення швидкості транспортного засобу за формулою: U я, kI x де - швидкість транспортного засобу; Uя - напруга якоря електричного двигуна; k - коефіцієнт зв'язку; I - струм якоря та обмотки збудження; x - показник ступеня, що знаходиться в межах 0,4-0,6. Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Автори англійськоюSinchuk Oleh Mykolaiovych, Huzov Eduard Semenovych, Sinchuk Ihor Olehovych, Debelyi Volodymyr Leonidovych, Chorna Viktoriia Olehivna
Автори російськоюСинчук Олег Николаевич, Гузов Эдуард Семенович, Синчук Игорь Олегович, Дебелый Владимир Леонидович, Чорная Виктория Олеговна
МПК / Мітки
МПК: B65G 43/00
Мітки: контролю, руху, пристрій, електрифікованих, транспорту, видів, швидкості
Код посилання
<a href="https://ua.patents.su/4-100019-pristrijj-kontrolyu-shvidkosti-rukhu-elektrifikovanikh-vidiv-transportu.html" target="_blank" rel="follow" title="База патентів України">Пристрій контролю швидкості руху електрифікованих видів транспорту</a>
Спосіб контролю руху дорожнього транспорту

Номер патенту: 73359
Опубліковано: 15.07.2005
Автор: Дудніков Олександр Миколайович
Мітки: дорожнього, контролю, спосіб, руху, транспорту
Формула / Реферат:
Спосіб контролю руху дорожнього транспорту, що полягає у фіксуванні трьох положень окремих дорожніх транспортних засобів по довжині дороги, вимірі при цьому часу їхнього руху від одного до іншого положення, із супутнім визначенням двох значень їхньої швидкості руху, який відрізняється тим, що в другому положенні вимірюють величини нормальної силової взаємодії коліс кожного дорожнього транспортного засобу з поверхнею дорожнього покриття, на...
Пристрій автоматичного контролю швидкості, зупинки і забезпечення управління рухом транспорту

Номер патенту: 25076
Опубліковано: 25.12.1998
Автор: Малон Жан-П`єр
Мітки: транспорту, контролю, забезпечення, швидкості, пристрій, рухом, зупинки, управління, автоматичного
Пристрій для контролю кутів нахилу засобів транспорту
Номер патенту: 94673
Опубліковано: 25.11.2014
Автори: Задорожня Вікторія Володимирівна, Полянський Олександр Сергійович, Федченко Владислав Володимирович, Дубінін Євген Олександрович
МПК: B60W 30/04
Мітки: пристрій, засобів, транспорту, нахилу, контролю, кутів
Формула / Реферат:
Пристрій для контролю кутів нахилу засобів транспорту, що містить електричні датчики крену, який відрізняється тим, що містить блок електричних інклінометричних датчиків, які надсилають сигнали до блоку перетворення і обробки інформації, в якому виконується оцінка кутів нахилу із заданою точністю, їх порівняння із гранично припустимими значеннями, після чого результат передається до блоку відображення інформації та попереджувальної...
Пристрій для вимірювання довжини та швидкості руху виробів
Номер патенту: 70581
Опубліковано: 25.07.2007
Автори: Баранов Юрій Вячеславович, Бондар Анатолій Юрьйович, Лютов Ігор Валерійович, Маслак Віктор Миколайович
МПК: G01B 7/02
Мітки: руху, виробів, вимірювання, пристрій, швидкості, довжини
Формула / Реферат:
1. Пристрій для вимірювання довжини і швидкості руху виробів, який містить датчик довжини, з'єднаний входом з першим виходом джерела стабілізованих напруг, другий вихід якого підключений до першого входу блока індикації, а виходом - із входом формувача імпульсів, комутатор, вихід якого приєднаний до приводу руху виробу, який відрізняється тим, що в нього введені контролер, який складається із з'єднаних між собою центрального процесорного...
Спосіб визначення швидкості руху та координат транспортних засобів з подальшою їх ідентифікацією та автоматичною реєстрацією порушень правил дорожнього руху та пристрій для його реалізації
Номер патенту: 105418
Опубліковано: 12.05.2014
Автори: Осіпов Сєргєй Константіновіч, Малінкін Алєксєй Юрьєвіч
МПК: G08G 1/054, G07C 5/00, G08G 1/017
Мітки: реєстрацією, подальшою, пристрій, правил, швидкості, реалізації, транспортних, визначення, координат, руху, засобів, ідентифікацією, спосіб, дорожнього, автоматичною, порушень
Формула / Реферат:
1. Спосіб визначення швидкості руху і координат транспортних засобів з подальшою їх ідентифікацією і автоматичною реєстрацією порушень правил дорожнього руху, який передбачає випромінювання у напрямку транспортних засобів, які рухаються по ділянці дорожнього полотна, імпульсів електромагнітного випромінювання, прийом імпульсів відбитого електромагнітного випромінювання, обчислення дальності і швидкості руху транспортного засобу шляхом...