Спосіб контролю руху дорожнього транспорту

Формула / Реферат
Спосіб контролю руху дорожнього транспорту, що полягає у фіксуванні трьох положень окремих дорожніх транспортних засобів по довжині дороги, вимірі при цьому часу їхнього руху від одного до іншого положення, із супутнім визначенням двох значень їхньої швидкості руху, який відрізняється тим, що в другому положенні вимірюють величини нормальної силової взаємодії коліс кожного дорожнього транспортного засобу з поверхнею дорожнього покриття, на основі вимірів визначають їхню масу, по величині маси і двох значеннях швидкості розраховують два значення поточної кінетичної енергії кожного дорожнього транспортного засобу, підсумовують їх і одержують два поточних значення кінетичної енергії контрольованого руху дорожнього транспорту, використовують при цьому заміряні час руху, відстань між першим і третім положеннями і розраховують зміни поточної кінетичної енергії в часі і по довжині пройденого шляху.
Текст
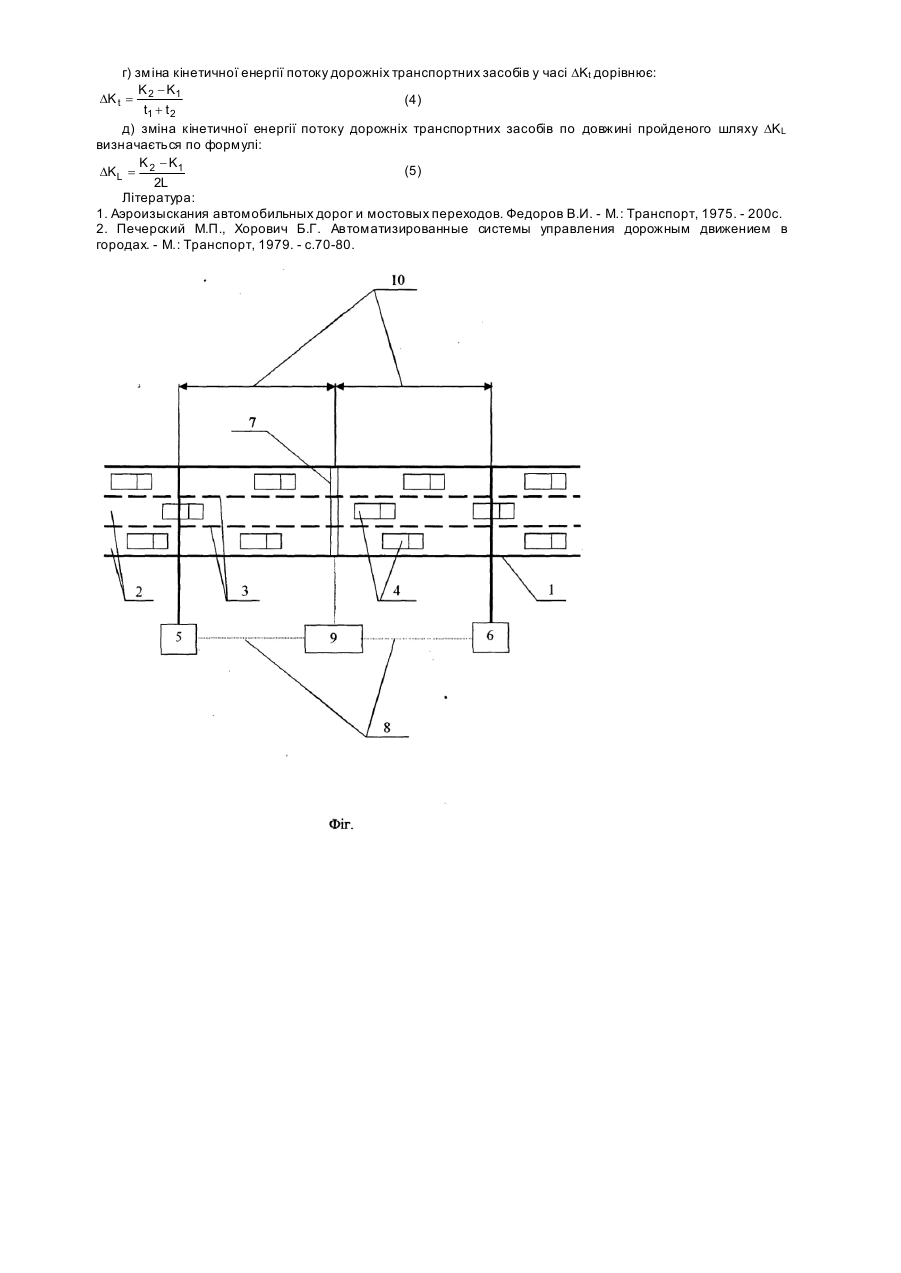
Винахід відноситься до систем регулювання руху транспортних засобів, зокрема до систем регулювання руху дорожнього транспорту в області збору поточних даних про рух транспортного потоку. Існує спосіб контролю руху дорожнього транспорту, що полягає у виконанні аерофотознімання рухомого транспортного потоку. При ньому виконують фото-, кіно- чи відео зйомку ділянки дороги з борту літака, при цьому фіксують поточний літний час, отриману зйомку переробляють у кадрову гр упу знімків через рівні інтервали часу. Знімки геодезичним методом розшифровують, з розшифрованих знімків визначають переміщення окремих дорожніх транспортних засобів, розділом переміщень на відомий час їхнього здійснення, визначають швидкості конкретних транспортних засобів [1]. Недолік відомого способу зв'язаний, насамперед, з тим, що отримані значення параметрів руху дорожнього транспорту відповідають тільки моменту зйомки потоку, відстежити їхні зміни на досліджуваній ділянці дороги практично не можливо, у зв'язку зі зміною складу потоку, його інтенсивності, щільності і швидкості окремих транспортних засобів до і після зйомки, тим більше, неможливо розробляти і здійснювати оперативні впливи на транспортний потік по зміні його поточних характеристик, до того ж спосіб також є дорогим у застосуванні. Найбільш близьким до заявляємого рішення, по технічній сутності є спосіб контролю руху дорожнього транспорту, що полягає у фіксуванні трьох положень окремих дорожніх транспортних засобів по довжині дороги, вимірі при цьому часу їхнього руху від одного до іншого положення, із супутнім визначенням двох значень їхньої швидкості руху [2]. Недолік відомого способу зв'язаний з відсутністю можливості побудови більш ефективної системи регулювання руху дорожнього транспорту на основі не кінематичних параметрів, а динамічних, енергетичних характеристик потоку дорожніх транспортних засобів. Технічною задачею створення винаходу є забезпечення можливості: реєстрації поточних енергетичних характеристик дорожнього транспортного потоку і створення більш ефективних систем регулювання його руху, що дозволить підвищити безпеку дорожнього руху і збільшити пропускну здатність окремих ділянок доріг. Поставлена задача вирішується тим, що в існуючому способі контролю руху дорожнього транспорту з фіксуванням трьох положень окремих дорожніх транспортних засобів по довжині дороги, виміром при цьому часу їхнього руху від одного до іншого положення, із супутнім визначенням двох значень їхньої швидкості руху, додатково, у др угому положенні вимірюють величини нормальної силової взаємодії коліс кожного дорожнього транспортного засобу з поверхнею дорожнього покриття, на підставі вимірів визначають їхню масу, по величині маси і двом значенням швидкості розраховують два значення поточної кінетичної енергії кожного дорожнього транспортного засобу, підсумовують їх, і одержують два поточних значення кінетичної енергії контрольованого руху дорожнього транспорту, використовують при цьому заміряні час руху, відстань між першим і третім положенням і розраховують зміни поточної кінетичної енергії в часі і по довжині пройденого шляху. Запропоноване рішення пояснюється кресленням одного з можливих пристроїв, у якому реалізується пропонований спосіб, де на Фіг. - представлена структурно-кінематична схема установки по контролю кінетичної енергії руху дорожнього транспорту. Установка виконана на ділянці проїзної частини і включає: 1 - дорожнє покриття; 2 - смуги одного напрямку руху; 3 - лінії розмежування смуг; 4 - рухомі дорожні транспортні засоби. Конструктивно до складу установки входять: 5 - перший блок детекторів дорожніх транспортних засобів; 6 - другий блок детекторів дорожніх транспортних, засобів; 7 - проміжний блок датчиків маси дорожніх транспортних засобів; 8 електричні ланцюги; 9 - обчислювальний блок; 10 - одинична відстань установки блоків детекторів дорожніх транспортних засобів L. Блок датчиків маси транспортних засобів 7, виконаний у виді металевої смуги, встановленої в дорожнє покриття 1 з можливістю деформації при впливі на неї коліс дорожнього транспортного засобу 4, на смузі закріплені тензометричні датчики, що у залежності від величини деформації змінюють властивості підключених до них електричних ланцюгів 8 обчислювального блоку 9. Характер даної зміни прямо пропорційний вазі, що впливає на смугу. Блоки 5 і 6 формуються з відомих конструкцій детекторів транспорту. Порядок роботи пристрою: - рухомий дорожній транспортний засіб, фіксується датчиком 5, при цьому починається відлік часу t1 у обчислювальному блоці 9; - проїжджаючи датчик 7, дорожній транспортний засіб фіксується в другому положенні, визначається його маса m, закінчується перший відлік часу у обчислювальному блоці 9 і починається другий - t 2; - рухомий дорожній транспортний засіб, фіксується датчиком 6 і другий відлік часу у обчислювальному блоці 9 закінчується; - обчислювальний блок 9 виконує наступні розрахунки: V V2i а) значення швидкостей конкретних дорожніх транспортних засобів 1i і визначаються по формулах: L L V1i = , V2i = (1) t1i t 2i б) значення поточної кінетичної енергії конкретних дорожніх транспортних засобів розраховуються по формулах: mi × V12 i 2 mi × V2i K1i і K2 i (2) 2 2 в) значення поточної кінетичної енергії потоку дорожніх транспортних засобів K1 і K2 розраховуються по формулах: K1 = å K1i , K 2 = å K 2i (3) K1i = , K 2i = г) зміна кінетичної енергії потоку дорожніх транспортних засобів у часі DKt дорівнює: K - K1 DK t = 2 (4) t1 + t 2 д) зміна кінетичної енергії потоку дорожніх транспортних засобів по довжині пройденого шляху DKL визначається по формулі: K - K1 (5) DKL = 2 2L Література: 1. Аэроизыскания автомобильных дорог и мостовых переходов. Федоров В.И. - М.: Транспорт, 1975. - 200с. 2. Печерский М.П., Хорович Б.Г. Автоматизированные системы управления дорожным движением в городах. - М.: Транспорт, 1979. - с.70-80.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for monitoring flow of traffic
Назва патенту російськоюСпособ контроля движения транспортных средств
МПК / Мітки
Мітки: контролю, руху, транспорту, дорожнього, спосіб
Код посилання
<a href="https://ua.patents.su/2-73359-sposib-kontrolyu-rukhu-dorozhnogo-transportu.html" target="_blank" rel="follow" title="База патентів України">Спосіб контролю руху дорожнього транспорту</a>
Пристрій для регулювання дорожнього руху
Номер патенту: 44478
Опубліковано: 15.02.2002
Автори: Коломійцев Петро Семенович, Потребчук Анатолій Володимирович, Пономарчук Анатолій Федосійович, Пономарчук Ігор Анатолійович
МПК: G08G 1/09
Мітки: пристрій, руху, регулювання, дорожнього
Формула / Реферат:
1. Пристрій для регулювання дорожнього руху, що містить блок керування та блок світлових сигналів, з трьох вертикально розташованих секцій червоної, у верхній частині блока, жовтої, у середній та зеленої у нижній частині блока, який відрізняється тим, що освітлення секцій виконано у вигляді окремих світлових елементів у формі концентричних кіл, секторів, смуг або іншої конфігурації.2. Пристрій за п. 1, який відрізняється тим, що...
Пристрій для поосьового зважування вагонів технологічного транспорту під час руху

Номер патенту: 67937
Опубліковано: 15.07.2004
Автори: Сацюк Валерій Іванович, Раздобаров Віктор Георгійович, Ситий Володимир Іванович, Чаков Олександр Миколайович, Лісовий Віталій Васильович
МПК: B60S 5/00, G01G 19/00
Мітки: транспорту, пристрій, вагонів, поосьового, руху, зважування, технологічного
Формула / Реферат:
Пристрій для поосьового зважування вагонів технологічного транспорту під час руху, що містить вантажоприймальний вузол, який складається з платформи, що опирається на силовимірювальні датчики, підключені до аналого-цифрового перетворювача, вузол визначення напрямку руху, блок процесора з запам'ятовуючими пристроями, з входами якого з'єднані аналого-цифровий перетворювач і вузол визначення напрямку руху, а його вихід через інтерфейс з'єднаний...
Пристрій для перетворювання енергії руху рейкового транспорту в електричну енергію
Номер патенту: 20028
Опубліковано: 25.12.1997
Автор: Затворницький Григорій Тимофійович
МПК: F03G 7/08
Мітки: енергії, транспорту, пристрій, рейкового, руху, перетворювання, енергію, електричну
Формула / Реферат:
1. Устройство для преобразования энергии движения рельсового транспорта в электрическую энергию, содержащее педаль для восприятия усилия от колес транспорта и маховичный аккумулятор с электрогенератором, соединенные передачей, включающей зубчатый сектор и шестерню, посредством обгонной муфты с педалью, отличающееся тем, что педаль выполнена в виде неравноплечевого рычага и установлена с возможностью взаимодействия с гребнем колеса транспорта,...
Спосіб градуювання дистанційних вимірювачів швидкості руху
Номер патенту: 69430
Опубліковано: 15.09.2004
Автор: Чепіжко Володимир Іванович
МПК: G01S 7/00, G01S 13/00, G01P 3/36
Мітки: спосіб, руху, вимірювачів, швидкості, дистанційних, градуювання
Формула / Реферат:
Спосіб градуювання дистанційних вимірювачів швидкості руху, при якому створюють міру швидкості руху об'єкта, яку приймають вимірювачем швидкості руху, що градуюють, і за різницею показань приладу та значення міри швидкості руху визначають систематичну похибку, за якою градуюють вимірювач швидкості руху, який відрізняється тим, що міру швидкості руху створюють за рахунок того, що встановлюють металевий екран, опромінюють нерівну рухому...
Порошкоподібний наповнювач для бітумвмісних шляхів руху транспорту
Номер патенту: 27420
Опубліковано: 15.09.2000
Автори: Кемерайт Вільхельм, Кайпль Штефан, Аннемайєр Дітер, Шмітт Оскар
МПК: E01C 11/24, E01C 7/00
Мітки: бітумвмісних, транспорту, порошкоподібний, шляхів, руху, наповнювач
Текст:
...гомогенной смеси В качестве каменной муки могут быть использованы, например, известняковая, мраморная мука, мука вулканической лавы, базальтовая, кварцевая и/или сланцевая Л»ука В качестве каменной муки наиболее предпочтительной является известняковая мука В предлагаемом наполнителе доля частиц диаметром более 90 мкм, определяемая просеиванием в струйном воздушном потоке, составляет, преимущественно, от 5 до 20 вес %, особенно...
Попередній патент: Спосіб обробки гідрофобних пластів
Наступний патент: Військова машина з обладнанням для самообкопування
Випадковий патент: Тренажер для освоєння техніки накладання хірургічних швів на тканини