Спосіб визначення ухилів, кривизни, нерівностей дорожнього покриття

Формула / Реферат
Спосіб визначення ухилів, нерівностей, кривизни дорожнього покриття, що включає вимірювання прискорення і лінійної швидкості транспортного засобу, пройденого шляху і часу руху, подальше визначення ухилів і кривизни профілю дорожнього покриття за допомогою ЕОМ шляхом обчислення значення прискорення у напрямі руху і величини поздовжнього ухилу профілю для заданої ділянки шляху, який відрізняється тим, що вимірювання прискорення транспортного засобу проводять за допомогою датчиків, встановлених в його підресореній частині, а при обчисленні значень прискорень за допомогою ЕОМ застосовують цифрову фільтрацію.
Текст
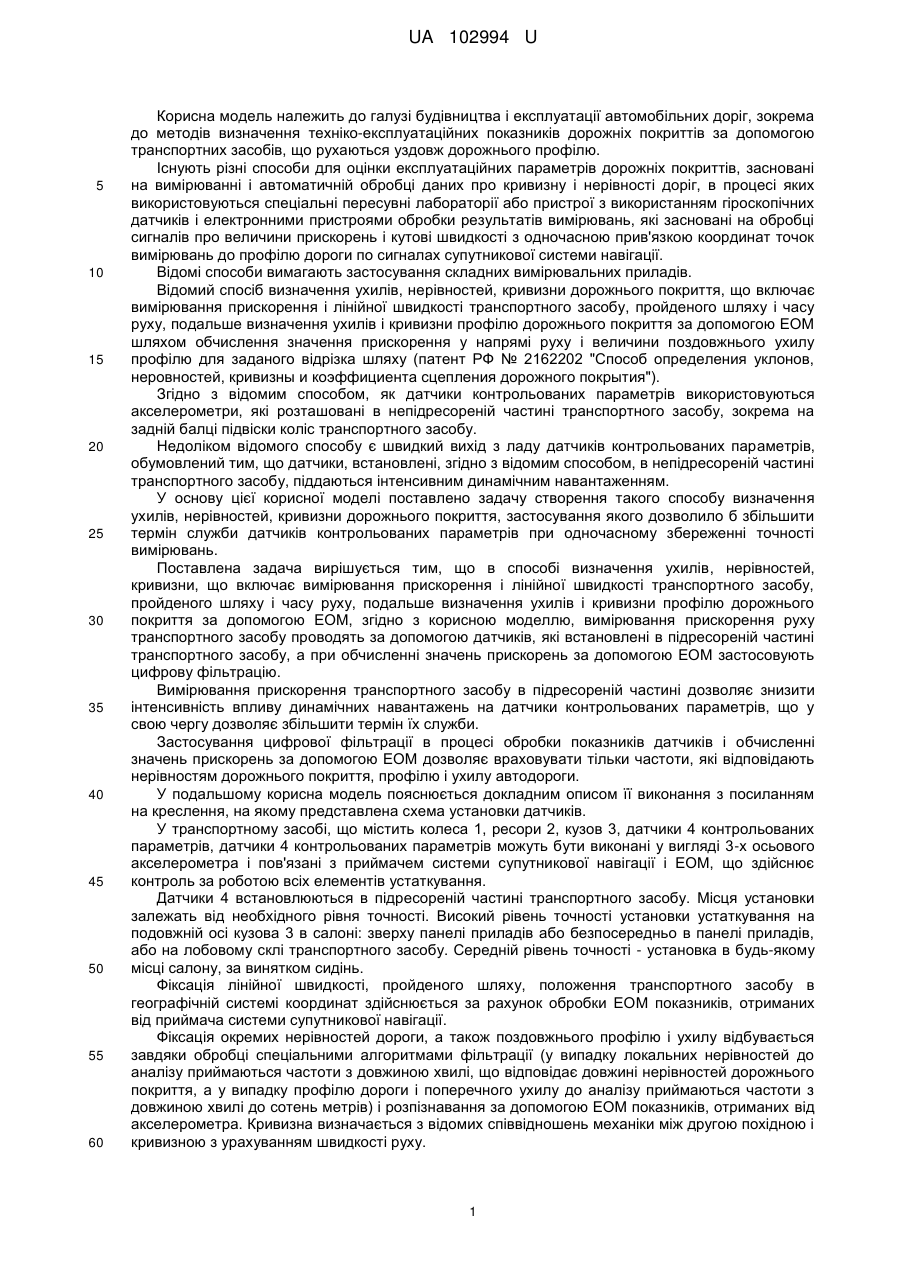
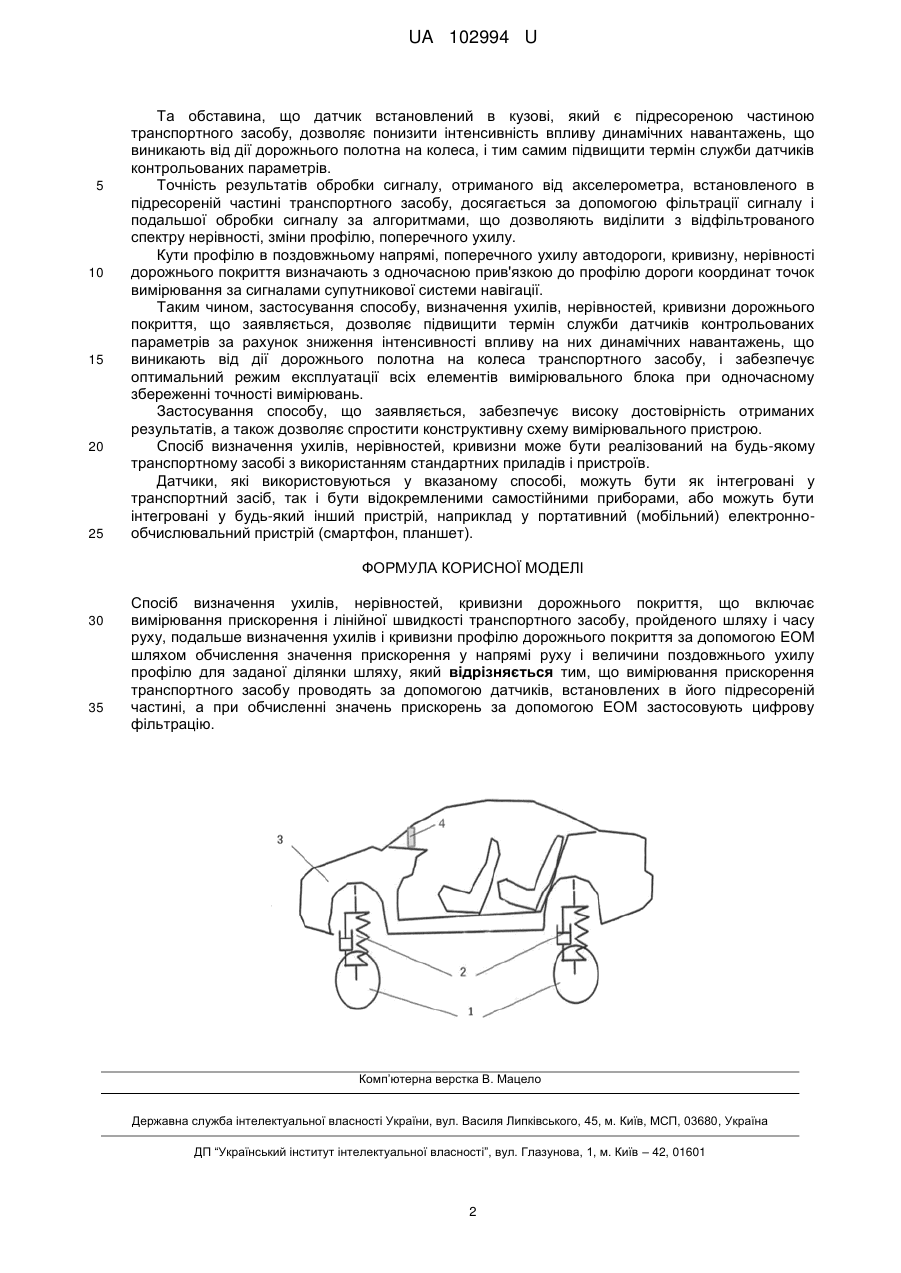
Реферат: Спосіб визначення ухилів, нерівностей, кривизни дорожнього покриття включає вимірювання прискорення і лінійної швидкості транспортного засобу, пройденого шляху і часу руху, подальше визначення ухилів і кривизни профілю дорожнього покриття за допомогою ЕОМ шляхом обчислення значення прискорення у напрямі руху і величини поздовжнього ухилу профілю для заданої ділянки шляху. Вимірювання прискорення транспортного засобу проводять за допомогою датчиків, встановлених в його підресореній частині, а при обчисленні значень прискорень за допомогою ЕОМ застосовують цифрову фільтрацію. UA 102994 U (54) СПОСІБ ВИЗНАЧЕННЯ УХИЛІВ, КРИВИЗНИ, НЕРІВНОСТЕЙ ДОРОЖНЬОГО ПОКРИТТЯ UA 102994 U UA 102994 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі будівництва і експлуатації автомобільних доріг, зокрема до методів визначення техніко-експлуатаційних показників дорожніх покриттів за допомогою транспортних засобів, що рухаються уздовж дорожнього профілю. Існують різні способи для оцінки експлуатаційних параметрів дорожніх покриттів, засновані на вимірюванні і автоматичній обробці даних про кривизну і нерівності доріг, в процесі яких використовуються спеціальні пересувні лабораторії або пристрої з використанням гіроскопічних датчиків і електронними пристроями обробки результатів вимірювань, які засновані на обробці сигналів про величини прискорень і кутові швидкості з одночасною прив'язкою координат точок вимірювань до профілю дороги по сигналах супутникової системи навігації. Відомі способи вимагають застосування складних вимірювальних приладів. Відомий спосіб визначення ухилів, нерівностей, кривизни дорожнього покриття, що включає вимірювання прискорення і лінійної швидкості транспортного засобу, пройденого шляху і часу руху, подальше визначення ухилів і кривизни профілю дорожнього покриття за допомогою ЕОМ шляхом обчислення значення прискорення у напрямі руху і величини поздовжнього ухилу профілю для заданого відрізка шляху (патент РФ № 2162202 "Способ определения уклонов, неровностей, кривизны и коэффициента сцепления дорожного покрытия"). Згідно з відомим способом, як датчики контрольованих параметрів використовуються акселерометри, які розташовані в непідресореній частині транспортного засобу, зокрема на задній балці підвіски коліс транспортного засобу. Недоліком відомого способу є швидкий вихід з ладу датчиків контрольованих параметрів, обумовлений тим, що датчики, встановлені, згідно з відомим способом, в непідресореній частині транспортного засобу, піддаються інтенсивним динамічним навантаженням. У основу цієї корисної моделі поставлено задачу створення такого способу визначення ухилів, нерівностей, кривизни дорожнього покриття, застосування якого дозволило б збільшити термін служби датчиків контрольованих параметрів при одночасному збереженні точності вимірювань. Поставлена задача вирішується тим, що в способі визначення ухилів, нерівностей, кривизни, що включає вимірювання прискорення і лінійної швидкості транспортного засобу, пройденого шляху і часу руху, подальше визначення ухилів і кривизни профілю дорожнього покриття за допомогою ЕОМ, згідно з корисною моделлю, вимірювання прискорення руху транспортного засобу проводять за допомогою датчиків, які встановлені в підресореній частині транспортного засобу, а при обчисленні значень прискорень за допомогою ЕОМ застосовують цифрову фільтрацію. Вимірювання прискорення транспортного засобу в підресореній частині дозволяє знизити інтенсивність впливу динамічних навантажень на датчики контрольованих параметрів, що у свою чергу дозволяє збільшити термін їх служби. Застосування цифрової фільтрації в процесі обробки показників датчиків і обчисленні значень прискорень за допомогою ЕОМ дозволяє враховувати тільки частоти, які відповідають нерівностям дорожнього покриття, профілю і ухилу автодороги. У подальшому корисна модель пояснюється докладним описом її виконання з посиланням на креслення, на якому представлена схема установки датчиків. У транспортному засобі, що містить колеса 1, ресори 2, кузов 3, датчики 4 контрольованих параметрів, датчики 4 контрольованих параметрів можуть бути виконані у вигляді 3-х осьового акселерометра і пов'язані з приймачем системи супутникової навігації і ЕОМ, що здійснює контроль за роботою всіх елементів устаткування. Датчики 4 встановлюються в підресореній частині транспортного засобу. Місця установки залежать від необхідного рівня точності. Високий рівень точності установки устаткування на подовжній осі кузова 3 в салоні: зверху панелі приладів або безпосередньо в панелі приладів, або на лобовому склі транспортного засобу. Середній рівень точності - установка в будь-якому місці салону, за винятком сидінь. Фіксація лінійної швидкості, пройденого шляху, положення транспортного засобу в географічній системі координат здійснюється за рахунок обробки ЕОМ показників, отриманих від приймача системи супутникової навігації. Фіксація окремих нерівностей дороги, а також поздовжнього профілю і ухилу відбувається завдяки обробці спеціальними алгоритмами фільтрації (у випадку локальних нерівностей до аналізу приймаються частоти з довжиною хвилі, що відповідає довжині нерівностей дорожнього покриття, а у випадку профілю дороги і поперечного ухилу до аналізу приймаються частоти з довжиною хвилі до сотень метрів) і розпізнавання за допомогою ЕОМ показників, отриманих від акселерометра. Кривизна визначається з відомих співвідношень механіки між другою похідною і кривизною з урахуванням швидкості руху. 1 UA 102994 U 5 10 15 20 25 Та обставина, що датчик встановлений в кузові, який є підресореною частиною транспортного засобу, дозволяє понизити інтенсивність впливу динамічних навантажень, що виникають від дії дорожнього полотна на колеса, і тим самим підвищити термін служби датчиків контрольованих параметрів. Точність результатів обробки сигналу, отриманого від акселерометра, встановленого в підресореній частині транспортного засобу, досягається за допомогою фільтрації сигналу і подальшої обробки сигналу за алгоритмами, що дозволяють виділити з відфільтрованого спектру нерівності, зміни профілю, поперечного ухилу. Кути профілю в поздовжньому напрямі, поперечного ухилу автодороги, кривизну, нерівності дорожнього покриття визначають з одночасною прив'язкою до профілю дороги координат точок вимірювання за сигналами супутникової системи навігації. Таким чином, застосування способу, визначення ухилів, нерівностей, кривизни дорожнього покриття, що заявляється, дозволяє підвищити термін служби датчиків контрольованих параметрів за рахунок зниження інтенсивності впливу на них динамічних навантажень, що виникають від дії дорожнього полотна на колеса транспортного засобу, і забезпечує оптимальний режим експлуатації всіх елементів вимірювального блока при одночасному збереженні точності вимірювань. Застосування способу, що заявляється, забезпечує високу достовірність отриманих результатів, а також дозволяє спростити конструктивну схему вимірювального пристрою. Спосіб визначення ухилів, нерівностей, кривизни може бути реалізований на будь-якому транспортному засобі з використанням стандартних приладів і пристроїв. Датчики, які використовуються у вказаному способі, можуть бути як інтегровані у транспортний засіб, так і бути відокремленими самостійними приборами, або можуть бути інтегровані у будь-який інший пристрій, наприклад у портативний (мобільний) електроннообчислювальний пристрій (смартфон, планшет). ФОРМУЛА КОРИСНОЇ МОДЕЛІ 30 35 Спосіб визначення ухилів, нерівностей, кривизни дорожнього покриття, що включає вимірювання прискорення і лінійної швидкості транспортного засобу, пройденого шляху і часу руху, подальше визначення ухилів і кривизни профілю дорожнього покриття за допомогою ЕОМ шляхом обчислення значення прискорення у напрямі руху і величини поздовжнього ухилу профілю для заданої ділянки шляху, який відрізняється тим, що вимірювання прискорення транспортного засобу проводять за допомогою датчиків, встановлених в його підресореній частині, а при обчисленні значень прискорень за допомогою ЕОМ застосовують цифрову фільтрацію. Комп’ютерна верстка В. Мацело Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of determining of slope, curvature, inequality of road surface
Автори англійськоюKalenyk Kostiantyn Leonidovych
Назва патенту російськоюСпособ определения уклонов, кривизны, неровностей дорожного покрытия
Автори російськоюКаленик Константин Леонидович
МПК / Мітки
МПК: G01C 7/04, E01C 23/07
Мітки: покриття, дорожнього, нерівностей, спосіб, ухилів, кривизни, визначення
Код посилання
<a href="https://ua.patents.su/4-102994-sposib-viznachennya-ukhiliv-krivizni-nerivnostejj-dorozhnogo-pokrittya.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення ухилів, кривизни, нерівностей дорожнього покриття</a>
Пристрій для визначення модуля пружності та товщин асфальтобетонних шарів дорожнього покриття
Номер патенту: 104248
Опубліковано: 10.01.2014
Автори: Новаковський Дмитро Миколайович, Волювач Сергій Васильович, Пархоменко Олександр Юрійович, Кіяшко Ігор Володимирович, Жданюк Валерій Кузьмович
МПК: G01B 7/00, E01C 23/00
Мітки: асфальтобетонних, модуля, пристрій, покриття, визначення, товщин, дорожнього, шарів, пружності
Формула / Реферат:
Пристрій для визначення модуля пружності та товщини асфальтобетонних шарів дорожнього покриття, що містить джерело живлення, імпульсне джерело пружних поверхневих хвиль, датчики реєстрації розповсюдження пружних поверхневих хвиль і блок обробки результатів вимірювань, який відрізняється тим, що містить як імпульсне джерело пружних поверхневих хвиль електромагнітний соленоїд, як датчики реєстрації розповсюдження пружних поверхневих хвиль...
Пристрій для визначення модуля пружності та товщин асфальтобетонних шарів дорожнього покриття
Номер патенту: 82103
Опубліковано: 25.07.2013
Автори: Новаковський Дмитро Миколайович, Пархоменко Олександр Юрійович, Кіяшко Ігор Володимирович, Волювач Сергій Васильович, Жданюк Валерій Кузьмович
МПК: E01C 23/00
Мітки: дорожнього, асфальтобетонних, товщин, пружності, визначення, модуля, пристрій, шарів, покриття
Формула / Реферат:
Пристрій для визначення модуля пружності та товщини асфальтобетонних шарів дорожнього покриття, що включає джерело живлення, імпульсне джерело пружних поверхневих хвиль, датчики реєстрації розповсюдження пружних поверхневих хвиль і блок обробки результатів вимірювань, який відрізняється тим, що містить як імпульсне джерело пружних поверхневих хвиль електромагнітний соленоїд, як датчики реєстрації розповсюдження пружних поверхневих хвиль...
Пристрій для вимірювання шорсткості асфальтобетонного дорожнього покриття
Номер патенту: 104247
Опубліковано: 10.01.2014
Автори: Смолянюк Роман Володимирович, Прусенко Євген Дмитрович, Кіяшко Ігор Володимирович, Волювач Сергій Васильович
МПК: E01C 23/00, G01B 11/00
Мітки: дорожнього, шорсткості, асфальтобетонного, пристрій, вимірювання, покриття
Формула / Реферат:
Пристрій для вимірювання шорсткості асфальтобетонного дорожнього покриття, що містить джерело когерентного випромінювання, об'єктив для фокусування падаючого випромінювання, послідовно розташовані на шляху відбитого випромінювання об'єктив для фокусування відбитого випромінювання, фотоприймач і реєструючий блок, який відрізняється тим, що систему сканування виконано у вигляді оптико-електронної, яка базується на вимірюванні дифузного...
Пристрій для вимірювання шорсткості асфальтобетонного дорожнього покриття
Номер патенту: 82102
Опубліковано: 25.07.2013
Автори: Смолянюк Роман Володимирович, Кіяшко Ігор Володимирович, Прусенко Євген Дмитрович, Волювач Сергій Васильович
МПК: E01C 23/00
Мітки: пристрій, покриття, шорсткості, асфальтобетонного, дорожнього, вимірювання
Формула / Реферат:
Пристрій для вимірювання шорсткості асфальтобетонного дорожнього покриття, що включає джерело когерентного випромінювання, об'єктив для фокусування падаючого випромінювання, послідовно розташовані на шляху відбитого випромінювання об'єктив для фокусування відбитого випромінювання, фотоприймач і реєструючий блок, який відрізняється тим, що систему сканування виконано у вигляді оптико-електронної, яка базується на вимірюванні дифузного...
Композиція для дорожнього покриття, її застосування для одержання холодного покриття для дорожнього будівництва та холодне покриття
Номер патенту: 95462
Опубліковано: 10.08.2011
Автори: Мартен Жан-Валері, Мюнен Давід, Уртадо Аснар Хав'єр, Лезюер Дідьє
МПК: C08L 95/00, E01C 7/00
Мітки: холодне, покриття, застосування, будівництва, дорожнього, холодного, композиція, одержання
Формула / Реферат:
1. Композиція для дорожнього покриття, що складається з: і) від 0,5 до 30 % мас. бітумної емульсії, що складається зa) від 0,1 до 3 % мас. амфотерної поверхнево-активної речовини, вибраної зі сполук формул (І) або (II) , (I) , (II)деR1 являє собою аліфатичну,...
Попередній патент: Пристосування для визначення горизонтального меридіана рогівки
Наступний патент: Складений стрічковий електрод для наплавлення
Випадковий патент: Спосіб приготування біологічно активної приправи