Спосіб визначення коливання висотної споруди

Формула / Реферат
Спосіб визначення коливання висотної споруди, що включає знімання з двох точок базису за допомогою цифрової знімальної камери, опрацювання отриманої стереопари на цифровій фотограмметричній станції з визначенням координат точок на поверхні висотної споруди та обчислення за ними її коливання, який відрізняється тим, що додатково використовують другу цифрову знімальну камеру, при цьому камери вмикають у режимі синхронного періодичного знімання, а опрацювання отриманої стереопари здійснюють вимірюванням координат заданих точок, враховують масштабний коефіцієнт, і за різницею відстаней точок від вертикальної осі висотної споруди визначають її лінійне відхилення та кут нахилу, за якими судять про коливання.
Текст
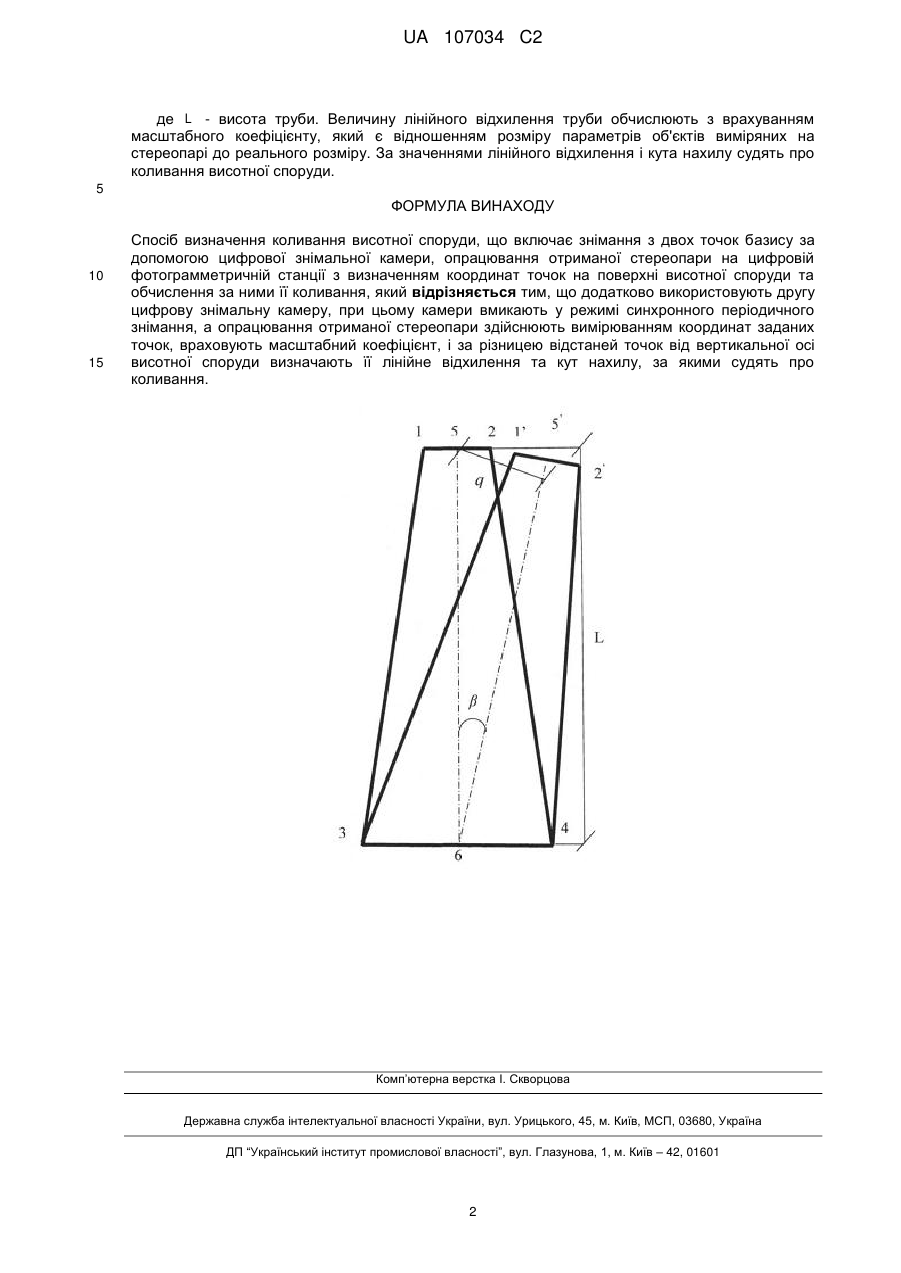
Реферат: Винахід належить до способів визначення коливань висотних споруд. Спосіб включає знімання з двох точок базису за допомогою цифрової знімальної камери, опрацювання отриманої стереопари на цифровій фотограмметричній станції з визначенням координат точок на поверхні висотної споруди та обчислення за ними її коливання. Згідно з винаходом, додатково використовують другу цифрову знімальну камеру, при цьому камери вмикають у режимі синхронного періодичного знімання, а опрацювання отриманої стереопари здійснюють вимірюванням координат заданих точок. При цьому враховують масштабний коефіцієнт, і за різницею відстаней точок від вертикальної осі висотної споруди визначають її лінійне відхилення та кут нахилу, за якими судять про коливання. Технічний результат: забезпечення точного визначення реального положення висотної споруди у фіксований час, отримання амплітуди її коливання в градусній або лінійній мірі, підвищення точності визначення коливання, зменшення собівартості способу. UA 107034 C2 (12) UA 107034 C2 UA 107034 C2 5 10 15 20 25 30 35 40 45 50 Винахід належить до наземного цифрового фототеодолітного знімання і може бути використаний при визначенні коливань висотних споруд, зокрема труб, димарів, щогл тощо при будівництві та експлуатації. Відомий спосіб визначення коливань висотної споруди, наприклад труби, що включає встановлення на споруді до 10 чутливих сейсмовібраційних давачів (акселерометрів), радіосигнали з яких за трьома каналами передають через підсилювач та контролер до три канального блоку модуляції, і далі через аналогово-цифровий перетворювач до комп'ютера, піддають обробці та аналізу з допомогою відповідного програмного забезпечення (Применение мобильных диагностических комплексов для оценки прочности, устойчивости и остаточного ресурса зданий и сооружений. В.А. Котляревский, СП. Сущев, В.И. Ларионов, А.И. Перепелицын). Але за допомогою цього способу вимірюють тільки коливання в окремих точках споруди (у даному комплексі тільки до 10), це потребує багато часу, що витрачається на підготовку обладнання та допоміжних засобів для кожного дослідження. Більш того, поверхня об'єкту (наприклад труби) може вимірюватись лише в тих точках, де встановлюються давачі, а решта споруди залишається поза межами дослідження. Окрім цього, в цьому способі розташування давачів безпосередньо в зоні деформації, вносить додаткові похибки. Суттєвим недоліком способу є його висока собівартість, що обумовлюється специфічністю його застосування і використання дорогої номенклатурної апаратури. Відомий спосіб визначення коливання висотної споруди, що включає знімання за допомогою цифрової знімальної камери з двох точок базису, опрацювання отриманої стереопари зображень на цифровій фотограмметричній станції (ЦФС) з визначенням координат точок на поверхні висотної споруди та обчислення за ними коливання висотної споруди (Глотов В.М. Методи навігаційно-цифрової фотограмметрії при дослідженні кінематичних процесів. Дисертація на здобуття наукового ступеня доктора технічних наук. Львів, 2007, с. 138). Але цей спосіб недостатньо точний, оскільки знімання виконують з двох точок неодночасно. В основу винаходу поставлено задачу вдосконалити спосіб визначення коливання висотної споруди, в якому синхронне знімання з двох точок забезпечило би можливість отримання результатів реального коливання висотної споруди, а відтак підвищить точність визначення коливання, зменшить собівартість способу. Поставлена задача вирішується тим, що в способі визначення коливання висотної споруди, що включає знімання з двох точок базису за допомогою цифрової знімальної камери, опрацювання отриманої стереопари на цифровій фотограмметричній станції з визначенням координат точок на поверхні висотної споруди та обчислення за ними її коливання, згідно з винаходом, додатково використовують другу цифрову знімальну камеру, при цьому камери вмикають у режимі синхронного періодичного знімання, а опрацювання отриманої стереопари здійснюють вимірюванням координат заданих точок, враховують масштабний коефіцієнт, і за різницею відстаней точок від вертикальної осі висотної споруди визначають її лінійне відхилення та кут нахилу, за якими судять про коливання. Це забезпечує точне визначення реального положення висотної споруди у фіксований час, а відтак отримання амплітуди її коливання в градусній або лінійній мірі. Спосіб визначення коливання висотної споруди, наприклад, труби, здійснюють наступним чином. Сполучують цифрові знімальні камери між собою для синхронного знімання з двох точок базису, встановлюють на них періодичність знімання (припустимо, 1 сек.), виконують знімання одночасно з двох точок базису за допомогою двох цифрових знімальних камер, отримані цифрові зображення опрацьовують на ЦФС. Виміряють стереоскопічно координати крайніх точок 1i та 2i верхньої (Фіг.) та 3 і 4 нижньої частини об'єкту послідовно на всіх синхронно отриманих стереопарах у вікні "Взаємне орієнтування". Обраховують різниці пар точок 1-2 (1'-2') та 3-4 та обчислюють середнє значення цих пар (точки 5, 5' і 6), тобто визначають відлік середини верхньої та нижньої частини труби (Фіг.). Після цього вибирають максимальну різницю між цими координатами та обчислюють лінійне відхилення q за формулою q xmax xmin де - xmax 55 значення координати центру труби у верхній частині і-тої стереопари при максимальному відхиленні від вертикальної осі, x min - значення координати центру труби у верхній частині і-тої стереопари при мінімальному відхиленні від вертикальної осі. Безпосередньо кут нахилу труби для даної стереопари у відповідний момент часу обчислюють за формулою (Фіг.): tg q / L , 1 UA 107034 C2 де L - висота труби. Величину лінійного відхилення труби обчислюють з врахуванням масштабного коефіцієнту, який є відношенням розміру параметрів об'єктів виміряних на стереопарі до реального розміру. За значеннями лінійного відхилення і кута нахилу судять про коливання висотної споруди. 5 ФОРМУЛА ВИНАХОДУ 10 15 Спосіб визначення коливання висотної споруди, що включає знімання з двох точок базису за допомогою цифрової знімальної камери, опрацювання отриманої стереопари на цифровій фотограмметричній станції з визначенням координат точок на поверхні висотної споруди та обчислення за ними її коливання, який відрізняється тим, що додатково використовують другу цифрову знімальну камеру, при цьому камери вмикають у режимі синхронного періодичного знімання, а опрацювання отриманої стереопари здійснюють вимірюванням координат заданих точок, враховують масштабний коефіцієнт, і за різницею відстаней точок від вертикальної осі висотної споруди визначають її лінійне відхилення та кут нахилу, за якими судять про коливання. Комп’ютерна верстка І. Скворцова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Автори англійськоюHlotov Volodymyr Mykolaiovych
Автори російськоюГлотов Владимир Николаевич
МПК / Мітки
МПК: G01C 11/00
Мітки: висотної, визначення, споруди, спосіб, коливання
Код посилання
<a href="https://ua.patents.su/4-107034-sposib-viznachennya-kolivannya-visotno-sporudi.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення коливання висотної споруди</a>
Спосіб визначення асиметрії елементів оздоблення об’єктів архітектури
Номер патенту: 103830
Опубліковано: 25.11.2013
Автор: Глотов Володимир Миколайович
МПК: G01C 11/00
Мітки: оздоблення, асиметрії, визначення, спосіб, об'єктів, архітектури, елементів
Формула / Реферат:
Спосіб визначення асиметрії елементів оздоблення об'єктів архітектури, що включає знімання об'єкта архітектури з двох точок базису за допомогою цифрової знімальної камери, опрацювання одержаної стереопари зображень на цифровій фотограмметричній станції з отриманням координат та розмірів деталей споруди, який відрізняється тим, що для опрацювання зазначеної стереопари зображень на цифрову фотограмметричну станцію завантажують ліве і праве...
Спосіб керування креном та осіданням висотної споруди
Номер патенту: 42168
Опубліковано: 25.06.2009
Автори: Степура Іван Васильович, Шокарев Віктор Семенович, Самченко Роман Васильович, Павлов Анатолій Васильович
МПК: E02D 35/00
Мітки: креном, осіданням, висотної, спосіб, керування, споруди
Формула / Реферат:
1. Спосіб керування креном та осіданням фундаменту висотних споруд, який включає геодезичні вимірювання, встановлення кута та орієнтації крену споруд, рівного крену фундаменту, визначають надлишковий об'єм ґрунту під фундаментом зі сторони найменшого осідання, який перешкоджає усуненню крену, визначають параметри свердловин для видалення надлишкового ґрунту, бурять під фундаментом похилі свердловини, виконують спостереження за зміною нахилу...
Спосіб визначення висотної координати
Номер патенту: 77489
Опубліковано: 15.12.2006
Автори: Боровий Валентин Олександрович, Малік Тетяна Миколаївна, Бурачек Всеволод Германович
МПК: G01C 5/00
Мітки: висотної, спосіб, визначення, координати
Формула / Реферат:
Спосіб визначення висотної координати, який оснований на методі нівелювання вперед і містить операції візування на нівелірну рейку та знімання відліку по ній, який відрізняється тим, що одночасно з візуванням на нівелірну рейку візують авторефлекційно на призму типу БР-180о, при цьому ребро призми орієнтують вертикально і знімають по рейці: відлік по горизонтальній нитці сітки нівеліра і відлік за положенням авторефлекторного зображення...
Спосіб монтажу висотної споруди підрощенням
Номер патенту: 70
Опубліковано: 30.04.1993
Автор: Кагановський Леонід Овсійович
МПК: E04G 21/24, E04H 12/34
Мітки: монтажу, споруди, висотної, підрощенням, спосіб
Формула / Реферат:
Способ монтажа высотного сооружения подращиванием, включающий формирование фундамента, установку на него временных шарниров для опирания верхней секции башни и последовательный подъем ее наклонами относительно вертикальной оси с подращиванием секций сооружения, отличающийся тем, что, с целью повышения надежности монтажа, его упрощения и уменьшения монтажной оснастки, подращивание секций сооружения осуществляют последовательно при каждом...
Спосіб передачі висотної відмітки

Номер патенту: 15618
Опубліковано: 17.07.2006
Автори: Тіркель Михайло Годелєвич, Бєженцев Володимир Ільїч, Полосьмак Валерій Миколайович, Філатов Валерій Федорович, Кисельов Микола Миколайович, Анциферов Андрій Вадимович
МПК: E21B 47/04, E21D 1/00
Мітки: передачі, висотної, спосіб, відмітки
Формула / Реферат:
Спосіб передачі висотної відмітки, що включає формування рухомої еталонної бази на відрізку труби, її переміщення усередині колони бурильних труб, нанесення на колону і зчитування магнітних міток, який відрізняється тим, що еталонну базу формують на стаціонарно закріпленій в копрі компарованій рулетці, відносно якої переміщається канат підйомної машини, а верхню і нижню відмітки еталонної довжини переносять покроково на канат підйомної машини...
Попередній патент: Паливо і горюча суміш для заміни викопного палива на теплоелектроцентралях, у промислових печах і печах центрального опалювання
Наступний патент: Фільтр-сепаратор для відокремлення механічних і хімічних домішок у рідинах
Випадковий патент: Система автоматичного водіння