Автоматичний гідропривід з об’ємним регулюванням
Номер патенту: 107313
Опубліковано: 25.05.2016
Автори: Соколов Володимир Ілліч, Соколова Яна Володимирівна, Рассказова Юлія Борисівна, Нікітченко Інна Вікторівна
Формула / Реферат
Автоматичний гідропривід з об'ємним регулюванням, що містить гідромотор, насос з робочим об'ємом, що регулюється, гідроапаратуру та пристрій для регулювання робочого об'єму насосу, який відрізняється тим, що в гідроприводі розташовано датчик кутових переміщень валу гідромотора та стохастичний оптимальний регулятор, причому вхід стохастичного оптимального регулятора зв'язаний з датчиком кутових переміщень валу гідромотора, а вихід – з пристроєм регулювання робочого об'єму насоса.
Текст
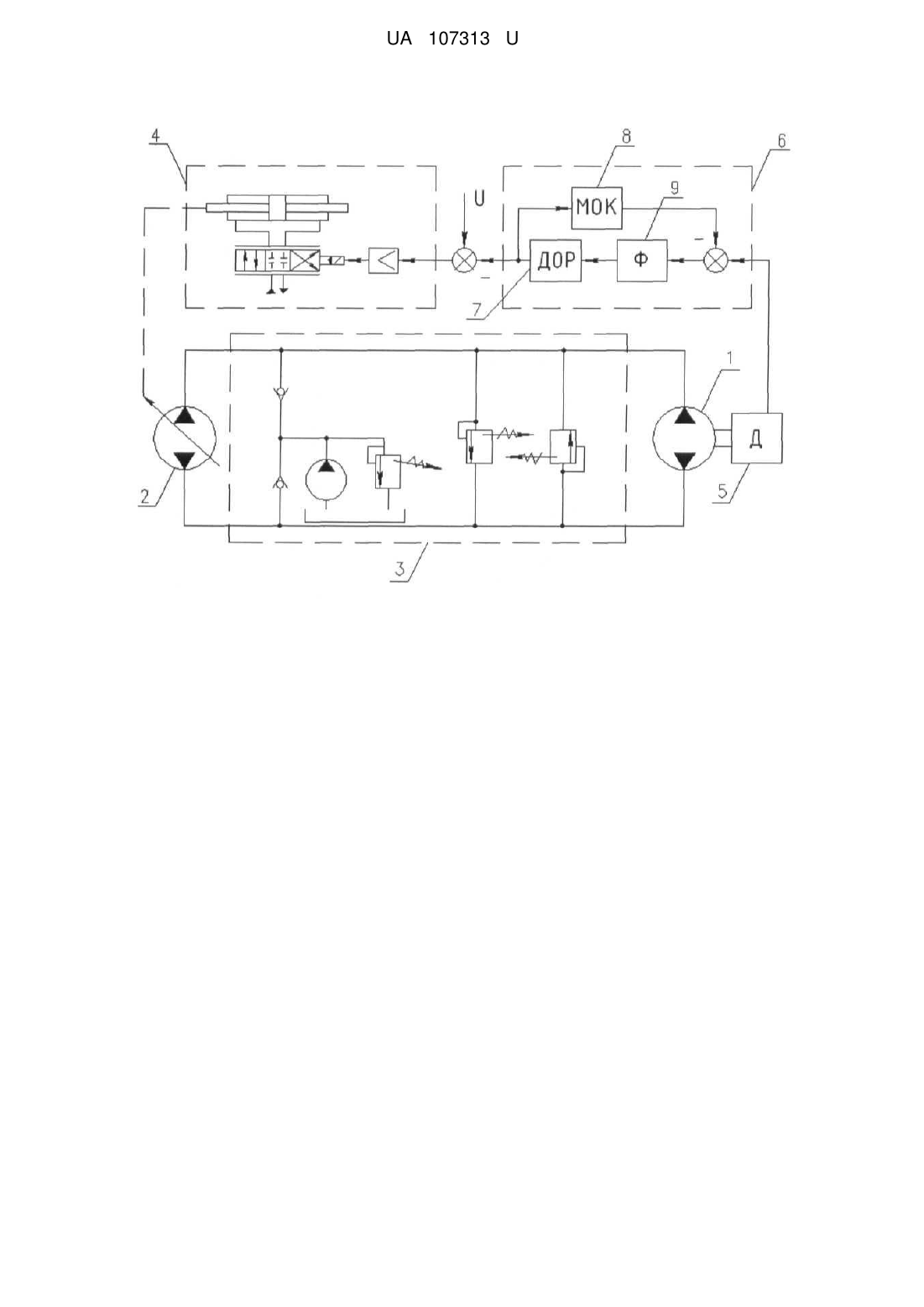
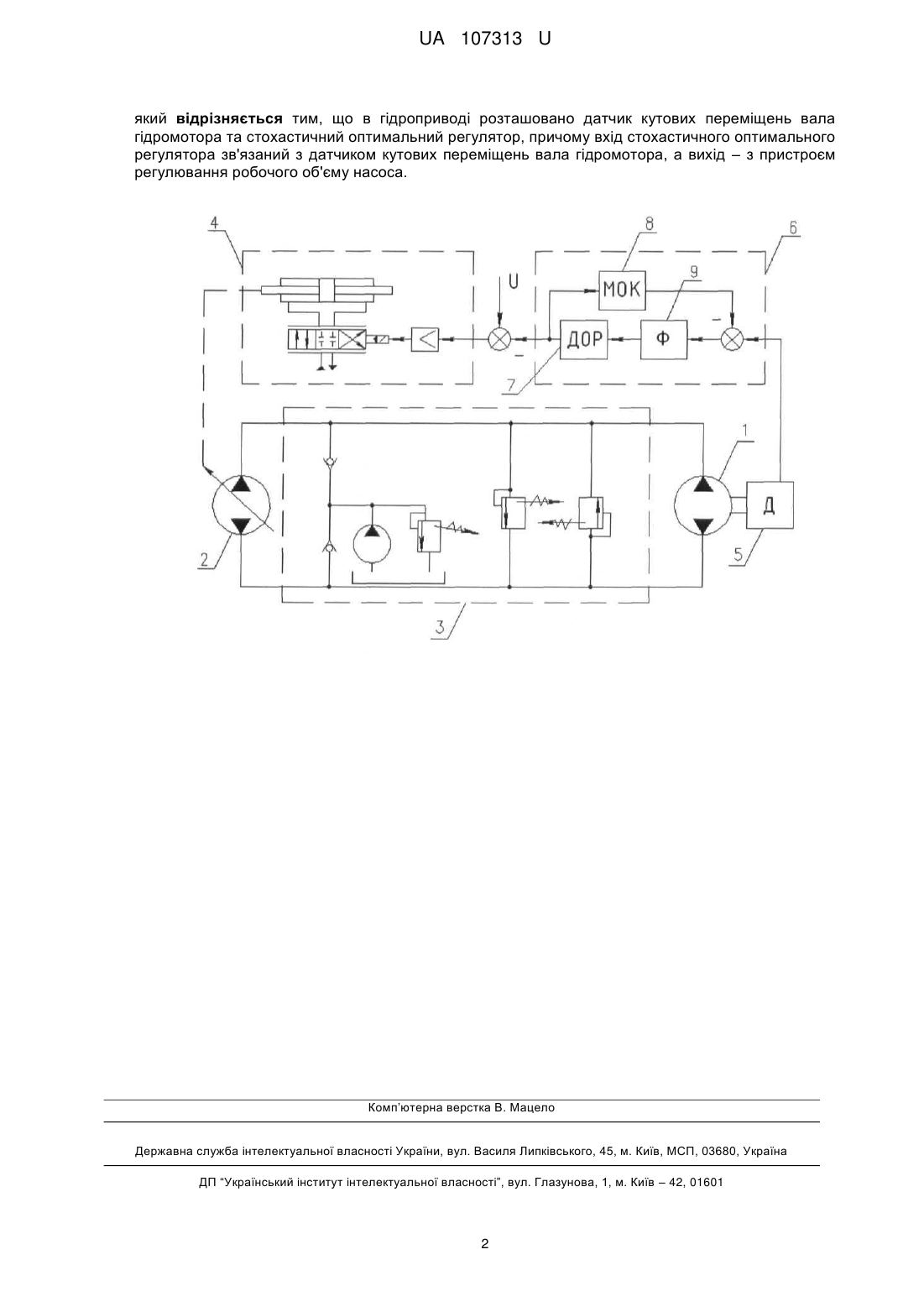
Реферат: Автоматичний гідропривід з об'ємним регулюванням містить гідромотор, насос з робочим об'ємом, що регулюється, гідроапаратуру та пристрій для регулювання робочого об'єму насоса. В гідроприводі розташовано датчик кутових переміщень вала гідромотора та стохастичний оптимальний регулятор. Вхід стохастичного оптимального регулятора зв'язаний з датчиком кутових переміщень вала гідромотора, а вихід – з пристроєм регулювання робочого об'єму насоса. UA 107313 U (54) АВТОМАТИЧНИЙ ГІДРОПРИВІД З ОБ'ЄМНИМ РЕГУЛЮВАННЯМ UA 107313 U UA 107313 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до галузі автоматичних приводів та може бути використана у металорізальних верстатах та системах, спеціальному технологічному обладнанні, машинах для обробки матеріалів тиском тощо. Відомо автоматичний гідропривід з об'ємним регулюванням, що містить гідромотор, насос з робочим об'ємом, що регулюється, гідроапаратуру та пристрій для регулювання робочого об'єму [1], обраний за прототип. Недоліком відомого автоматичного гідроприводу є наявність похибки керування, зменшення точності реалізації оптимальних законів руху робочого органу при стохастичному збуренні системи. В основу корисної моделі поставлено задачу удосконалення автоматичного гідроприводу для підвищення точності реалізації оптимальних законів руху робочого органу при стохастичному збуренні системи, зменшення похибки керування шляхом того, що в автоматичному гідроприводі розташовано датчик кутових переміщень вала гідромотора та стохастичний оптимальний регулятор, вхід якого зв'язаний з датчиком кутових переміщень, а вихід з пристроєм регулювання робочого об'єму насоса, що приведе до підвищення якості обробки матеріалів на верстатах та технологічному обладнанні. Поставлена задача досягається тим, що в автоматичному гідроприводі з об'ємним регулюванням, що містить гідромотор, насос з робочим об'ємом, що регулюється, гідроапаратуру та пристрій для регулювання робочого об'єму насосу, згідно корисної моделі розташовано датчик кутових переміщень вала гідромотора та стохастичний оптимальний регулятор, причому, вхід стохастичного оптимального регулятора зв'язаний з датчиком кутових переміщень вала гідромотора, а вихід – з пристроєм регулювання робочого об'єму насоса. В результаті цього досягається зменшення похибки керування та підвищення точності реалізації оптимальних законів руху робочого органу при стохастичному збуренні системи. Сутність корисної моделі пояснюється кресленням, де зображений автоматичний гідропривід з об'ємним регулюванням, що містить гідромотор 1, насос 2 з робочим об'ємом, що регулюється, гідроапаратуру 3, пристрій 4 для регулювання робочого об'єму насоса 2. В автоматичному гідроприводі розташовано датчик 5 кутових переміщень вала гідромотора та стохастичний оптимальний регулятор 6. Стохастичний оптимальний регулятор 6 містить детермінований оптимальний регулятор 7, модель об'єкту керування 8 та фільтр Калмана-Б'юсі 9. Автоматичний гідропривід з об'ємним регулюванням працює наступним чином. Відомо [2], що витрата робочої рідини насоса Q=qn, де q - робочий об'єм насоса, n - частота обертів двигуна насоса. Насос 2 зв'язаний з гідромотором 1 за допомогою гідроапаратури 3. При подачі управляючої напруги U на вхід пристрою 4 для регулювання робочого об'єму насоса 2 змінюється витрата робочої рідини до гідромотора 1, а відповідно, і швидкість руху його вала. Кутова швидкість та кутове переміщення вимірюється встановленим датчиком 5 кутових переміщень вала гідромотора 1, вихідний сигнал датчика 5 подається на вхід стохастичного оптимального регулятора 6. Наявність в стохастичному оптимальному регуляторі 6 моделі об'єкту керування 8 дозволяє враховувати стохастичне збурення системи, а завдяки фільтру Калмана-Б'юсі 9 визначається оцінка фазового вектору системи, на основі чого детермінований оптимальний регулятор 7 формує сигнал керування, що подається до пристрою 4 для регулювання робочого об'єму насоса 2. Тому, за рахунок розташування в гідроприводі датчика 5 кутових переміщень вала гідромотору 1 та стохастичного оптимального регулятора 6 при використанні відповідних методів автоматичного керування [3] досягається можливість зменшити похибку керування та підвищити точність реалізації оптимальних законів руху робочого органу при стохастичному збуренні системи. Джерелa інформації: 1. Патент України № 75596 Україна, МПК В30В15/14. Автоматичний гідропривід з об'ємним регулюванням, опубл. 10.12.2012, Бюл. № 23. 2. Мандрус В.І., Лещій Н.П., Звягін В.М. Машинобудівна гідравліка. Задачі та приклади розрахунку. - Львів: Світ, 1995. - 264 с. 3. Ким Д.П. Теория автоматического управления. Т.2. Многомерные, нелинейные, оптимальные и адаптивные системы: учебное пособие. - М.: Физматлит, 2004. - 464 с. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 60 Автоматичний гідропривід з об'ємним регулюванням, що містить гідромотор, насос з робочим об'ємом, що регулюється, гідроапаратуру та пристрій для регулювання робочого об'єму насоса, 1 UA 107313 U який відрізняється тим, що в гідроприводі розташовано датчик кутових переміщень вала гідромотора та стохастичний оптимальний регулятор, причому вхід стохастичного оптимального регулятора зв'язаний з датчиком кутових переміщень вала гідромотора, а вихід – з пристроєм регулювання робочого об'єму насоса. Комп’ютерна верстка В. Мацело Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B30B 15/14
Мітки: регулюванням, гідропривід, автоматичний, об'ємним
Код посилання
<a href="https://ua.patents.su/4-107313-avtomatichnijj-gidroprivid-z-obehmnim-regulyuvannyam.html" target="_blank" rel="follow" title="База патентів України">Автоматичний гідропривід з об’ємним регулюванням</a>
Автоматичний гідропривід
Номер патенту: 107312
Опубліковано: 25.05.2016
Автори: Нікітченко Інна Вікторівна, Рассказова Юлія Борисівна, Соколов Володимир Ілліч, Соколова Яна Володимирівна
МПК: B30B 15/14
Мітки: автоматичний, гідропривід
Формула / Реферат:
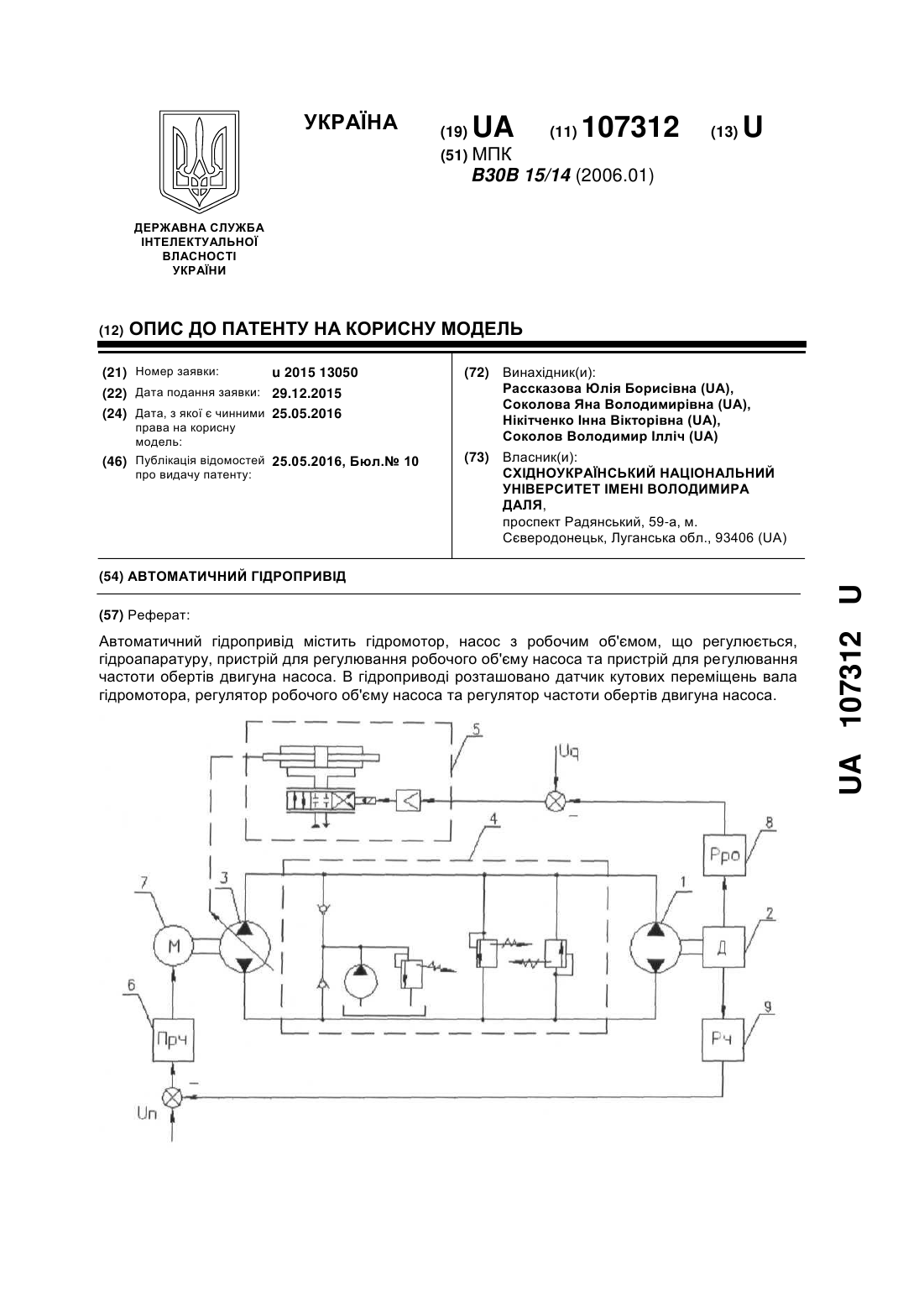
Автоматичний гідропривід, що містить гідромотор, насос з робочим об'ємом, що регулюється, гідроапаратуру, пристрій для регулювання робочого об'єму насоса та пристрій для регулювання частоти обертів двигуна насоса, який відрізняється тим, що у гідроприводі розташовано датчик кутових переміщень вала гідромотора, регулятор робочого об'єму насоса та регулятор частоти обертів двигуна насоса.
Автоматичний гідропривід з об’ємним регулюванням
Номер патенту: 75596
Опубліковано: 10.12.2012
Автори: Соколов Володимир Ілліч, Азаренко Наталія Геннадіївна, Соколова Яна Володимирівна, Осипов Віталій Ігорович
МПК: B30B 15/14
Мітки: гідропривід, автоматичний, регулюванням, об'ємним
Формула / Реферат:
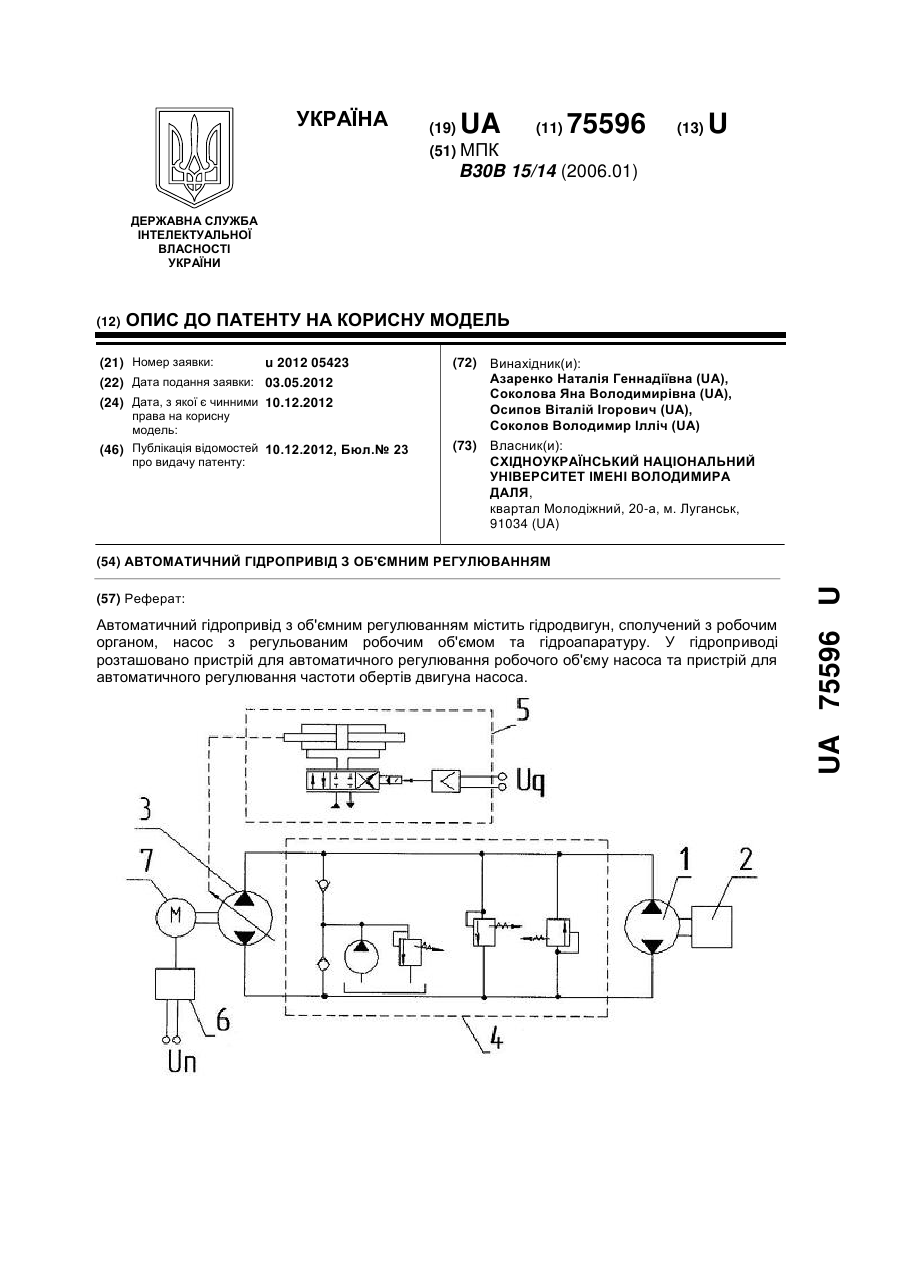
Автоматичний гідропривід з об'ємним регулюванням, що містить гідродвигун, сполучений з робочим органом, насос з регульованим робочим об'ємом та гідроапаратуру, який відрізняється тим, що у гідроприводі розташовано пристрій для автоматичного регулювання робочого об'єму насоса та пристрій для автоматичного регулювання частоти обертів двигуна насоса.
Гідропрес з автоматичним об’ємним регулюванням
Номер патенту: 59697
Опубліковано: 25.05.2011
Автори: Рей Роман Іванович, Соколов Володимир Ілліч, Соколова Яна Володимирівна, Таванюк Тетяна Яківна, Грешний Дмитро Сергійович, Гутько Юрій Іванович
МПК: B30B 15/14
Мітки: регулюванням, об'ємним, гідропрес, автоматичним
Формула / Реферат:
Гідропрес з автоматичним об'ємним регулюванням, що містить робочий орган, сполучений з двигуном, та гідропривід з насосом, що регулюється, який відрізняється тим, що у гідропресі розташовано датчик зворотного зв'язку швидкості робочого органу та пристрій для автоматичного регулювання робочого об'єму насоса.
Гідропривід робочого обладнання будівельно-дорожніх машин
Номер патенту: 64685
Опубліковано: 10.11.2011
Автори: Пінчук Микола Іванович, Сергеєв Сергій Гаврилович, Харченко Микола Михайлович, Шандренко Валерій Васильович
МПК: E02F 9/22
Мітки: робочого, машин, обладнання, гідропривід, будівельно-дорожних
Формула / Реферат:
Гідропривід робочого обладнання будівельно-дорожніх машин, що містить принаймні один насос, привідний вал якого кінематично з'єднаний з валом відбору потужності базової машини, при цьому насос встановлений на перехідній деталі, що одночасно призначена для кріплення корпусу насоса на трансмісії базової машини і передачі крутного моменту від вала відбору потужності базової машини до привідного вала насоса, який відрізняється тим, що перехідна...
Слідкуючий гідропривід

Номер патенту: 47796
Опубліковано: 25.02.2010
Автори: Лисенко Володимир Сергійович, Буслов Володимир Кузьмович, Таурит Тетяна Георгіївна, Щербо Валентин Євгенович, Муращенко Євген Геннадійович
МПК: F15D 1/00
Мітки: слідкуючий, гідропривід
Формула / Реферат:
1. Слідкуючий гідропривід, що містить насос, зливну та напірну гідролінії, гідробак, клапан тиску, золотниковий чотирилінійний гідророзподільник, встановлений на об'єкті керування, золотник якого взаємодіє першою пружиною з його корпусом, а також з програмоносієм, гідромотор пересування об'єкта керування та механізм зворотного зв'язку, який відрізняється тим, що програмоносій містить кроковий двигун, який через передачу гвинт-гайка та...
Попередній патент: Автоматичний гідропривід
Наступний патент: Жорстка відтяжка хобота
Випадковий патент: Сепаратор