Пристрій для усунення прихоплень при бурінні
Номер патенту: 108599
Опубліковано: 25.07.2016
Автори: Мойсишин Василь Михайлович, Левчук Катерина Григорівна, Векерик Василь Іванович
Формула / Реферат
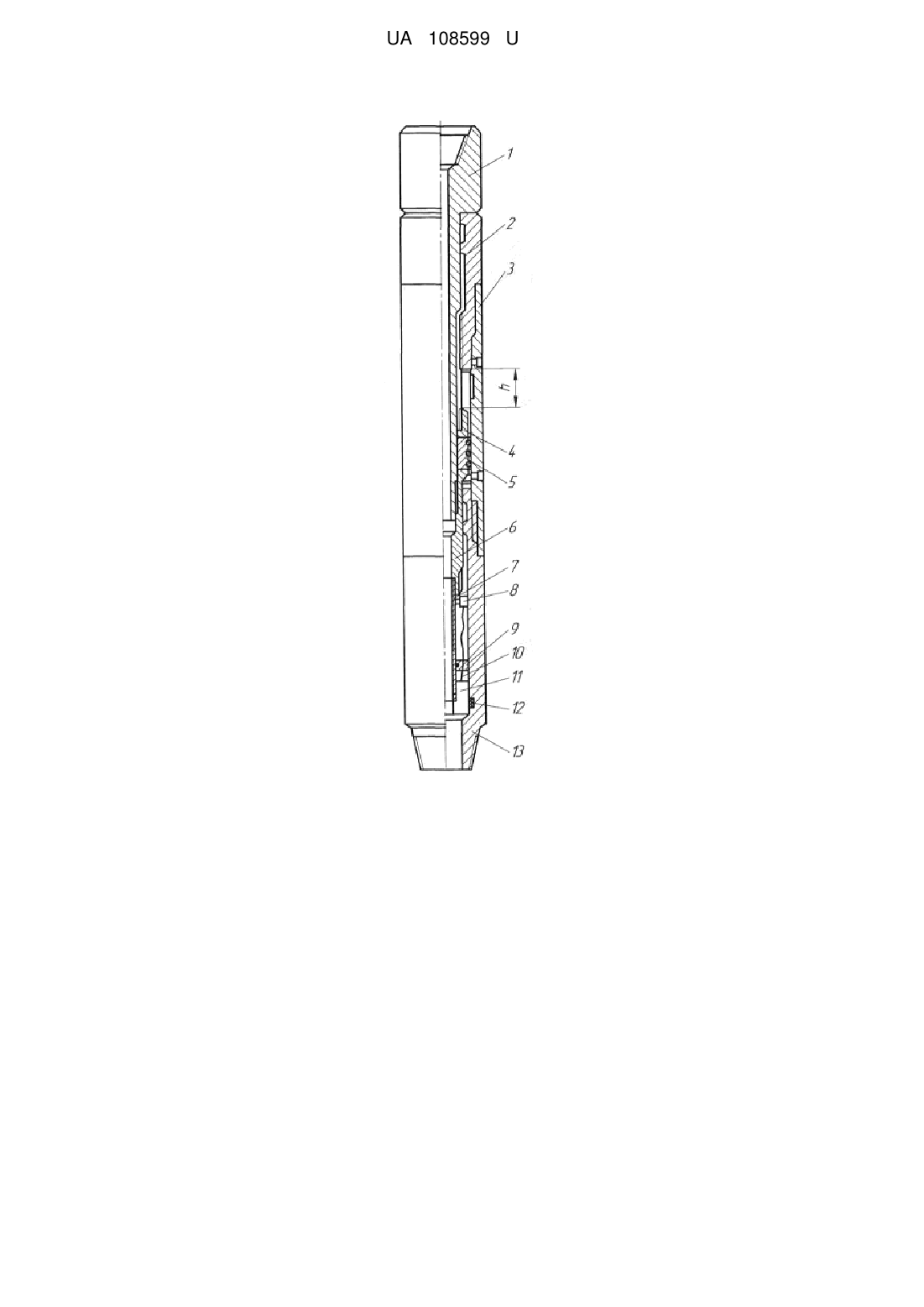
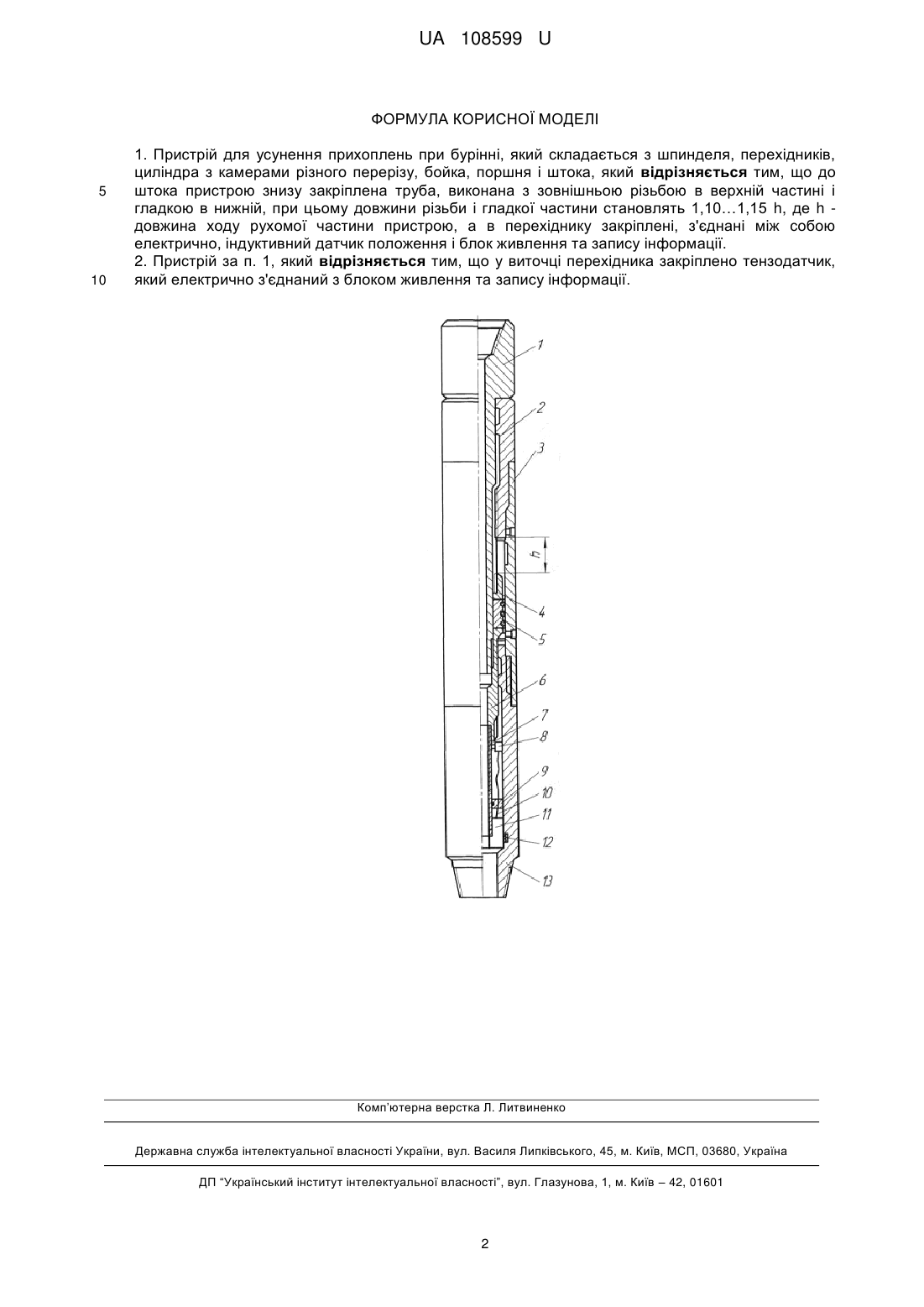
1. Пристрій для усунення прихоплень при бурінні, який складається з шпинделя, перехідників, циліндра з камерами різного перерізу, бойка, поршня і штока, який відрізняється тим, що до штока пристрою знизу закріплена труба, виконана з зовнішньою різьбою в верхній частині і гладкою в нижній, при цьому довжини різьби і гладкої частини становлять 1,10…1,15 h, де h - довжина ходу рухомої частини пристрою, а в перехіднику закріплені, з'єднані між собою електрично, індуктивний датчик положення і блок живлення та запису інформації.
2 Пристрій за п. 1, який відрізняється тим, що у виточці перехідника закріплено тензодатчик, який електрично з'єднаний з блоком живлення та запису інформації.
Текст
Реферат: Пристрій для усунення прихоплень при бурінні складається з шпинделя, перехідників, циліндра з камерами різного перерізу, бойка, поршня і штока. До штока пристрою знизу закріплена труба, що виконана з зовнішньою різьбою в верхній частині і гладкою в нижній. Довжини різьби і гладкої частини становлять 1,10…1,15 h. В перехіднику закріплені, з'єднані між собою електрично, індуктивний датчик положення і блок живлення та запису інформації. UA 108599 U (12) UA 108599 U UA 108599 U 5 10 15 20 25 30 35 40 45 50 55 У вітчизняній практиці для усунення прихоплень застосовують гідравлічні ударні механізми ГУМ конструкції ВНДІБТ. Ударний механізм ГУМ призначено для усунення прихоплень колони бурових або обсадних труб шляхом нанесення ударів. Шток ГУМа має поршень з кільцями, які переміщуються в двох камерах різного поперечного перерізу, заповнених робочою рідиною і з'єднаних між собою. Конструктивно кільця в поршні виконані так, що під час його руху в камері меншого поперечного перерізу робоча рідина перетікає через щілинний проміжок в кільцях з дуже великим гідравлічним опором. Швидкість руху поршня при цьому буде невеликою, що дає змогу вибрати за допомогою лебідки бурової установки потрібну силу натягу аварійної компоновки. Через деякий час поршень входить в камеру з площею поперечного перерізу, більшою від площі першої камери у 200 разів, завдяки виконаним на стінках корпусу поздовжнім пазам. Внаслідок цього робоча рідина вільно перетікає з однієї камери в іншу і ударна частина поршня з великою швидкістю переміщується і завдає удару [Мислюк М.А. і інші. Буріння свердловин. Довідник т. 5 - Київ "Інтерпрес ЛТД", 2004, с. 217-218]. Основним недоліком даної конструкції є відсутність даних щодо сили удару рухомої частини пристрою, тому що від цього важливого показника залежить міцність бурової колони. В основу корисної моделі поставлено задачу вдосконалити конструкцію пристрою з метою можливості визначення сили удару рухомої частини пристрою. Поставлена задача вирішується тим, що до штока пристрою знизу закріплена труба з зовнішньою різьбою в верхній частині, і виконана гладкою в нижній, а в перехіднику закріплені, з'єднані між собою електрично, індуктивний датчик положення і блок живлення та запису інформації, а у виточці перехідника закріплено тензодатчик, який електрично з'єднаний з блоком живлення та запису інформації. Суть корисної моделі пояснюється кресленням, де зображено загальний вигляд пристрою. Пристрій для усунення прихоплень при бурінні складається з шпинделя 1, перехідників 2 і 13, циліндра 3 з камерами різного перерізу, бойка 4, поршня 5 і штока 6, труби 7 з різьбою і гладкою частиною, датчика положення 8, ущільнення 9, шнура електричного 10, блока живлення та запису інформації 11 і тензодатчика 12. Пристрій працює наступним чином. Після створення лебідкою бурової установки необхідного натягу аварійної компоновки і проходження поршня 5 в циліндрі 3 більшої площі поперечного перерізу, поршень 5 переміщається вверх з великою швидкістю і завдає удару бойком 4. При цьому так само переміщається труба 7 з різьбою, яка виступами різьби дає датчику положення 8 сигнали для блока живлення та запису інформації 10, а своєю гладкою частиною забезпечує герметичність з ущільненням 9. Внаслідок удару бойком 4 перехідник 2 зазнає деформації розтягу, яка фіксується тензодатчиком 11 і надходить в блок живлення та запису інформації 10. Тарування тензодатчика попередньо проводиться створенням натягу аварійної компоновки лебідкою бурової установки. Враховуючи проміжки часу між сигналами і відстань між ними, ми можемо визначити швидкість і прискорення ударної частини пристрою в будь-який момент його руху. Силу удару пристрою в Н (ньютонах) визначимо за формулою F=ma, де m - маса рухомої частини 2 пристрою в кг, а "а" - його прискорення перед ударом в м/с . Закріплення до штока знизу труби 7 з зовнішньою різьбою дозволяє давати виступами різьби, віддаль між якими постійна і відома, зручні сигнали датчику положення, а своєю гладкою частиною забезпечує герметичність з ущільненням 9. Крім цього труба забезпечує необхідне проходження бурового розчину. Використання безконтактного індуктивного датчика положення зумовлене високою точністю і лінійністю, а також стійкістю до агресивного середовища. Наприклад, можна використати датчик ВБИ-ДО8-45У-1121-3. Виконання блока живлення та запису інформації в свердловині зумовлене необхідністю запису всіх необхідних величин з наступним розшифруванням їх на поверхні. Закріплення тензодатчика у виточціперехідника підвищить точність вимірювань сили удару. Визначення сили удару рухомої частини пристрою методом тензометрії та розрахунком, який враховує масу рухомої частини пристрою та її прискорення, значно підвищить точність визначення та уможливить визначення інших важливих характеристик пристрою, наприклад імпульсів динамічних складових сил. Врахування важливих характеристик роботи пристрою суттєво підвищить надійність його роботи. 60 1 UA 108599 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 1. Пристрій для усунення прихоплень при бурінні, який складається з шпинделя, перехідників, циліндра з камерами різного перерізу, бойка, поршня і штока, який відрізняється тим, що до штока пристрою знизу закріплена труба, виконана з зовнішньою різьбою в верхній частині і гладкою в нижній, при цьому довжини різьби і гладкої частини становлять 1,10…1,15 h, де h довжина ходу рухомої частини пристрою, а в перехіднику закріплені, з'єднані між собою електрично, індуктивний датчик положення і блок живлення та запису інформації. 2. Пристрій за п. 1, який відрізняється тим, що у виточці перехідника закріплено тензодатчик, який електрично з'єднаний з блоком живлення та запису інформації. Комп’ютерна верстка Л. Литвиненко Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
МПК / Мітки
МПК: E21B 31/107
Мітки: усунення, прихоплень, пристрій, бурінні
Код посилання
<a href="https://ua.patents.su/4-108599-pristrijj-dlya-usunennya-prikhoplen-pri-burinni.html" target="_blank" rel="follow" title="База патентів України">Пристрій для усунення прихоплень при бурінні</a>
Пристрій для усунення прихоплень при бурінні
Номер патенту: 104433
Опубліковано: 25.01.2016
Автори: Левчук Катерина Григорівна, Мойсишин Василь Михайлович, Векерик Василь Іванович
МПК: E21B 31/107
Мітки: усунення, бурінні, пристрій, прихоплень
Формула / Реферат:
1. Пристрій для усунення прихоплень при бурінні, який складається з шпинделя, перехідників, циліндра з двома камерами різного перерізу, бойка, поршня і штока, який відрізняється тим, що циліндричний бойок пристрою і нижній торець перехідника виконані заокругленими радіусом , де - товщина їх...
Пристрій для усунення прихватів при бурінні
Номер патенту: 89416
Опубліковано: 25.04.2014
Автори: Фриз Іван Михайлович, Чирва Станіслав Сергійович, Лотовський Ігор Валерійович
МПК: E21B 31/00
Мітки: усунення, прихватів, бурінні, пристрій
Формула / Реферат:
1. Пристрій для усунення прихватів при бурінні, який містить шпиндельну частину з верхнім перевідником, шток, поршень з кільцями і наконечник, ущільнення круглими гумовими кільцями, корпусну частину з шліцьовим перевідником, циліндром і нижній перевідник та розривну ланку, який відрізняється тим, що ущільнення рухомого з'єднання виконано шевронними фторопластовими і гумовими манжетами, встановленими попарно між собою і з пружним елементом,...
Пристрій для ліквідації прихоплень колони труб у свердловині
Номер патенту: 89841
Опубліковано: 25.04.2014
Автори: Гутий Андрій Володимирович, Харченко Євген Валентинович, Пукач Петро Ярославович
МПК: E21B 23/00
Мітки: свердловини, пристрій, колони, труб, ліквідації, прихоплень
Формула / Реферат:
Пристрій для ліквідації прихоплень колони труб у свердловині, який містить корпус з ковадлом у верхній частині, з конічною кільцевою розточкою і радіальними каналами, всередині якого розміщені пустотілий шток з упорним виступом і вузол роз'єднання, виконаний у вигляді конічної цанги, яка жорстко закріплена на нижньому кінці штока, з фіксуючою втулкою з підпружиненим зворотним клапаном, який відрізняється тим, що на частині штока над упорним...
Пристрій для ліквідації прихоплень
Номер патенту: 16437
Опубліковано: 15.08.2006
Автори: Малярчук Богдан Михайлович, Рибчич Ілля Йосипович, Світлицький Віктор Михайлович, Мельник Микола Миколайович, Огородніков Петро Іванович, Стефурак Роман Іванович
МПК: E21B 23/00
Мітки: пристрій, прихоплень, ліквідації
Формула / Реферат:
1. Пристрій для ліквідації прихоплень, містить шток та механізм роз'єднання у вигляді зубчастої муфти, який відрізняється тим, що містить спіральний розширювач, виконаний у вигляді плаваючого центратора, який взаємодіє з бурильною колоною за допомогою кулачкової зубчастої муфти.2. Пристрій за п. 1, який відрізняється тим, що верхня частина спірального розширювача виконана у вигляді напівсфери, по якій проходять кінці спіральних...
Пристрій для ліквідації прихоплень бурильної колони

Номер патенту: 25088
Опубліковано: 30.10.1998
Автори: Яремійчук Роман Семенович, Паневник Олександр Васильович
МПК: E21B 23/00
Мітки: прихоплень, бурильної, колони, пристрій, ліквідації
Формула / Реферат:
1. Пристрій для ліквідації прихоплень бурильної колони, який містить гідравлічний вібратор, що складається з корпуса з обмежувачем осьових переміщень і втулкою, в якій з зазором розміщений рухомий елемент, виконаний у вигляді кулі, який відрізняється тим, що над гідравлічним вібратором розміщений додатковий корпус з протилежно орієнтованими робочими органами, ідентичний основному і зв'язаний з ним бурильною трубою.2. Пристрій за п.1,...
Попередній патент: Елемент насадки масообмінного апарата
Наступний патент: Спосіб зведення литої смуги
Випадковий патент: Спосіб препарування