Система керування
Номер патенту: 11045
Опубліковано: 15.12.2005
Автори: Дронь Микола Михайлович, Хорольський Петро Георгійович
Формула / Реферат
Система керування ракетно-космічним носієм для виведення корисного вантажу на орбіту із заданими параметрами, яка включає послідовно з'єднані блок навігації, блок формування траєкторії, блок системи орієнтації та стабілізації, яка відрізняється тим, що в неї додатково введені блок прогнозу траєкторії, блок пам'яті, блок визначення похідних та блок визначення напрямку відділення корисного вантажу, причому блок пам'яті та блок визначення похідних з'єднані з блоком визначення напрямку відділення корисного вантажу, блок прогнозу траєкторії з'єднаний з блоком визначення похідних, блок формування траєкторії з'єднаний з блоком прогнозу траєкторії, блок визначення напрямку відділення корисного вантажу також з'єднаний з блоком формування траєкторії.
Текст
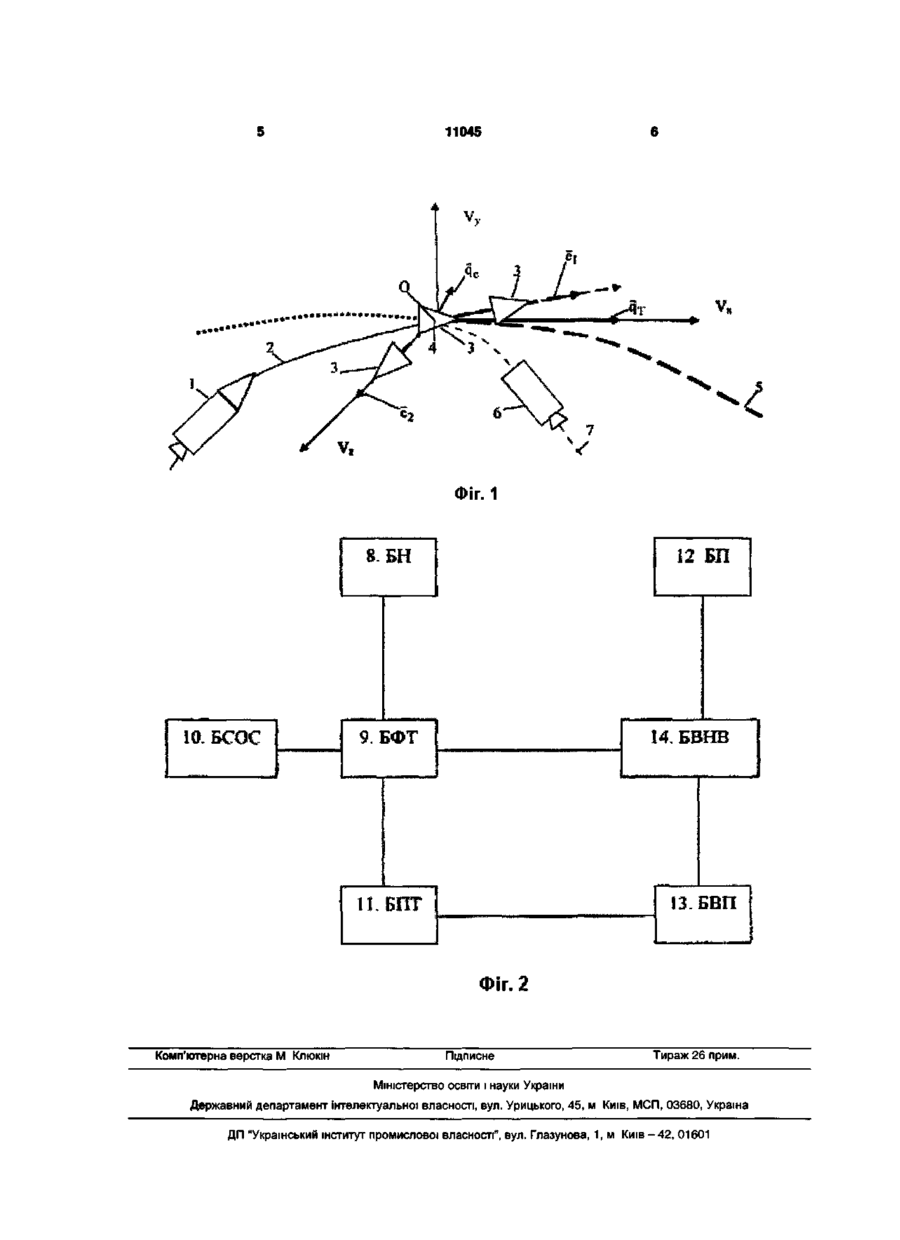
Система керування ракетно-космічним носієм для виведення корисного вантажу на орбіту із заданими параметрами, яка включає послідовно з'єднані блок навігації, блок формування траєкторії, блок системи орієнтації та стабілізації, яка відрізняється тим, що в неї додатково введені блок прогнозу траєкторії, блок пам'яті, блок визначення похідних та блок визначення напрямку відділення корисного вантажу, причому блок пам'яті та блок визначення похідних з'єднані з блоком визначення напрямку відділення корисного вантажу, блок прогнозу траєкторії з'єднаний з блоком визначення похідних, блок формування траєкторії з'єднаний з блоком прогнозу траєкторії, блок визначення напрямку відділення корисного вантажу також з'єднаний з блоком формування траєкторії. Корисна модель відноситься до ракетнокосмічної техніки, конкретно - до ракетнокосмічних транспортних засобів, які виводять корисні вантажі на задані орбіти. Відома комп'ютерна бортова система управління просторовим положенням і параметрами орбіти супутника (1) з блоками контролю орбіти, управління траєкторією польоту та визначення режимів роботи, а також датчиками та приводами. Ця система забезпечує піддержання просторового положення і параметрів орбіти супутника. Недоліками цієї системи є те, що вона не впливає на вибір напрямку відділення супутника і не контролює його точність запуску на орбіту. Відома також система керування космічним кораблем (2), яка складається з блоку управління ракетними двигунами, обчислювача, блока стабілізації, датчика для вимірювання орбітальної швидкості. Недоліки цього рішення співпадають з вищенаведеними для (3). Найбільш близьким аналогом є система керування (3), яка включає послідовно з'єднані блок навігації, блок формування траєкторії, блок системи орієнтації та стабілізації. Недоліком цього рішення є відсутність засобів знаходження оптимального напрямку відділення корисного вантажу та формування відповідної траєкторії. В основу корисної моделі поставлена задача розробки системи керування ракетно-космічним носієм для виведення корисного вантажу на орбіту із заданими параметрами, яка забезпечує підвищення точності відділення цього вантажу і зменшення впливу цієї складової на загальну точність виведення. Поставлена задача вирішується тим, що в систему керування ракетно-космічним носієм для виведення корисного вантажу на орбіту із заданими параметрами, яка включає послідовно з'єднані блок навігації, блок формування траєкторії, блок системи орієнтації та стабілізації, додатково введені блок прогнозу траєкторії, блок пам'яті, блок визначення похідних та блок визначення напрямку відділення корисного вантажу, причому блок пам'яті та блок визначення похідних з'єднані з блоком визначення напрямку відділення корисного вантажу, блок прогнозу траєкторії з'єднаний з блоком визначення похідних, блок формування траєкторії з'єднаний з блоком прогнозу траєкторії, блок визначення напрямку відділення корисного вантажу з'єднаний також з блоком формування траєкторії. Суть корисної моделі продемонстровано на кресленні. На фіг. 1 зображено схему здійснення процесу; на фіг. 2 зображено схему пристрою. Корисна модель здійснюється таким чином. Дії процесу продемонструємо на прикладі ракети. ю CD 11045 Як показано на фіг. 1, ракета (Р) 1 рухається по траєкторії 2 до моменту відділення корисного вантажу (KB) 3 у точці О 4, котрий продовжує рух по орбіті 5, а корпус ракети 6 - по власній орбіті 7. В точці О побудовано орбітальну систему координат OVxVyVz. В ній показані вектори часткових похідних по періоду обертання q T та ексцентриситету q e (для простоти обмежимся випадком п=2). Якщо напрямок відділення не оптимізується, то відокремлення KB відбувається практично вздовж вектору орбітальної швидкості v , з яким співпадає qT. Тоді похибка за рахунок відділення дорівнюватиме ДТ = |qT • Av , де швидкості відділення. Визначення напрямку Av 4 В польоті БН 8 вимірює навігаційні параметри носія, БФТ 9 перетворює їх у параметри траєкторії і видає в БПТ 11. БПТ 11 на їх основі прогнозує момент відділення корисного вантажу tK, а також кінематичні параметри руху носія на цей момент і видає їх у БВП 13. БВП 13 розраховує вектори часткових похідних q, =—- 1 і видає їх у БВНВ 14. dv БВНВ 14 отримує ваги параметрів орбіти R із БП 12. Після чого БВНВ 14 визначає напрямок відділення корисного вантажу вздовж орту - розкид відділення або як п-1 а 1 е і=1 приводить до зменшення похибки по п періоду Т і появи похибки по ексцентриситету. Головне є те, що зменшений вплив похибки на Т. А визначення напрямку відділення як X X Xh |=-| п-1 X і=1 п-1 п X". П р 1=1 р=і+1 п-1 п Хп, X р=і+1 1=1 п р (q,xqp) sign(q1xq2,q,xqp) зовсім нейтралізує вплив розкиду Av, оскільки відбувається перпендикулярно площині руху. Це приводить до погіршення нахилення, але воно в нашому випадку не контролюється під час виведення. Таку стратегію руху дозволяє відтворити система керування, показана на фіг. 2. Вона включає: - блок навігації (БН) 8, - блок формування траєкторії (БФТ) 9, - блок системи орієнтації та стабілізації (БСОС) 10, -блок прогнозу траєкторії (БПТ) 11, - блок пам'яті (БП) 12, -блок визначення похідних (БВП) 13, - блок визначення напрямку відділення корисного вантажу (БВНВ) 14. В пристрої між блоками введені такі зв'язки: - послідовно з'єднані БН 8, БФТ 9, БСОС 10, - БП 12 та БВП 13 з'єднані з БВНВ 14, - БПТ 11 з'єднаний з БФТ 9 та з БВП 13, - БВНВ 14 з'єднаний також з БФТ 9. Пристрій працює так. Відповідно до найближчого аналогу БН 8 постачає навігаційну інформацію у БФТ 9. БФТ 9 формує траєкторію і видає команди управління у БСОС 10, який забезпечує їх виконання. п П sign(q1xq2,q,xqp) Зна |+1 р= п h X i i=i p=i+i h p (q,xqp) sign(q1xq2,q,xqp) чення компонентів ортів ё БВНВ 14 подає у БФТ 9, який, в свою чергу, формує траєкторію руху носія для забезпечення на момент tk відділення корисного вантажу у цьому напрямку. Таким чином, кількість кінцевих умов, виконання яких забезпечує БФТ 9, звеличується на 3. БФТ 9 в кінці польоту подає команду на відділення KB 4 у напрямку, зазначеному на той момент часу. Всі блоки реалізуються засобами бортової цифрової машини ракетно-космічного носія. Таким чином, вирішена поставлена задача розробки системи керування ракетно-космічним носієм для виведення корисного вантажу на орбіту із заданими параметрами, яка забезпечує підвищення точності відділення цього вантажу і зменшення впливу цієї складової на загальну точність виведення. ДЖЕРЕЛА ІНФОРМАЦІЇ 1. US 6024327 А 7 В 64 G 1/24.Компьютерная бортовая система управления пространственным положением и параметрами орбиты спутника//Изобретения стран мира, 2001. - Вып. 33. - № 2.-С.18-19. 2. US 5400252 В 64 G 1/26. Система управления космического корабля/УИзобретения стран мира, 1996.-Вып. 33. - № 4. - С.13 3. Проблемы навигации и управления при выведении на орбиту ТКА // Экспресс-информация. Астронавтика и ракетодинамика, 1979. - вып. 48. №338.-С. 19. 11045 V ФІГ. 1 1 8.БН 10. БСОС І 9.1БФТ 12 БП 14. БВ і нв І ІЗ.БВП j 1Ї.БПТ Фіг. 2 Комп'ютерна верстка М Клюкін Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м Київ, МСП, 03680, Україна ДП "Український інститут промислової власності", вул. Глазунова, 1, м Київ - 4 2 , 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюControl system
Автори англійськоюDron Mykola Mykhailovych, Khorolskyi Petro Heorhiiovych
Назва патенту російськоюСистема управления
Автори російськоюДронь Николай Михайлович, Хорольский Петр Георгиевич
МПК / Мітки
МПК: G06F 5/00, B64G 1/00, F42B 15/00
Код посилання
<a href="https://ua.patents.su/4-11045-sistema-keruvannya.html" target="_blank" rel="follow" title="База патентів України">Система керування</a>
Система керування
Номер патенту: 66917
Опубліковано: 15.06.2004
Автори: Чигирин Юрій Трохимович, Чигирин Олег Трохимович, Маранов Олександр Вікторович
МПК: G06F 11/00, G06F 11/16
Формула / Реферат:
Система керування, що складається з багаторозрядного цифрового лічильного каналу, дешифратора, схеми керування, яка включає формувач і два елементи затримки, і генератора, вихід якого з'єднано з першими входами першого багаторозрядного цифрового лічильного каналу, схеми керування і дешифратора, вихід якого з'єднано з виходом системи керування, вхід схеми керування через перший елемент затримки, перший формувач і другий елемент затримки...
Система керування двигуновою установкою літального апарата
Номер патенту: 61817
Опубліковано: 17.11.2003
Автори: Дигало Оксана Миколаївна, Цехмейстер Олена Олексіївна, Кулік Анатолій Степанович, Лазоркін Юрій Юрійович, Бандура Іван Миколайович
МПК: B64D 31/00
Мітки: апарата, система, двигуновою, установкою, керування, літального
Формула / Реферат:
Система керування двигуновою установкою літального апарата, що містить датчик частоти обертання ротора двигуна, електричний привід паливного агрегату, з'єднаний з паливним агрегатом, яка відрізняється тим, що в неї введені датчик тиску повітря за компресором, послідовно з'єднаний з блоком регулювань точності датчика тиску, датчик температури повітря за вентилятором, послідовно з'єднаний із блоком регулювань точності датчика температури, блок...
Система керування параметрами організації
Номер патенту: 9181
Опубліковано: 15.09.2005
Автори: Серков Олександр Анатолійович, Логвиненко Микола Федорович, Пєвнєв Володимир Яковлевич, Чурюмов Геннадій Іванович
МПК: G05B 13/00
Мітки: параметрами, система, керування, організації
Формула / Реферат:
Система керування параметрами організації, що містить об'єкт керування, вимірник параметрів об'єкта керування, блок прийняття рішення, блок керування, яка відрізняється тим, що додатково введено редактор правил системи нечіткого виводу, редактор функцій належності, причому блок прийняття рішення реалізовано на основі апарата нечіткої логіки.
Система автоматичного керування процесом збагачення
Номер патенту: 51044
Опубліковано: 16.05.2005
Автори: Купін Андрій Іванович, Назаренко Володимир Михайлович, Назаренко Михайло Володимирович, Назаренко Наталія Володимирівна
МПК: B03B 13/00
Мітки: збагачення, процесом, автоматичного, система, керування
Формула / Реферат:
1. Система автоматичного керування процесом збагачення, що містить послідовно з'єднані блок регулювання подачі сировини, млин, класифікатор та сепаратор, а також екстремальний регулятор, виходи якого з'єднані із млином через пристрій регулювання витрати води в млин та зливом класифікатора через пристрій регулювання витрати води в злив класифікатора, а входи з'єднані з датчиками оперативної інформації, такими як датчик витрати води в млин...
Обчислювальна система візуального керування літальним апаратом
Номер патенту: 56876
Опубліковано: 15.05.2003
Автори: Гусятін Володимир Михайлович, Янковський Олександр Аркадійович
МПК: G06F 7/548, B64F 1/00
Мітки: візуального, обчислювальна, літальним, система, керування, апаратом
Формула / Реферат:
Обчислювальна система візуального керування літальним апаратом, що містить формувач сигналів зображення і блок керування, яка відрізняється тим, що в неї введені графічний спецпроцесор для систем візуалізації, блок обчислень по 3D-об'єктах, блок зв'язку з бортовим комп'ютером, зв'язаний двоспрямовано з блоком керування, перший пристрій для обчислення швидких геометричних перетворень, зв'язаний двоспрямовано з блоком керування і з’єднаний...