Роторно-гвинтовий рушій

Формула / Реферат
Роторно-гнинтовинй рушій, що містить ведучий вал і ротори, які з'єднані зі втулкою з можливістю вільного обертання відносно осей симетрії роторів і радіально розташовані відносно ведучого валу, який відрізняється тим, що ведучий вал з'єднаний зі втулкою з можливістю вільного обертання відносно втулки, а ротори зв'язані з ведучим валом механічними передачами.
Текст
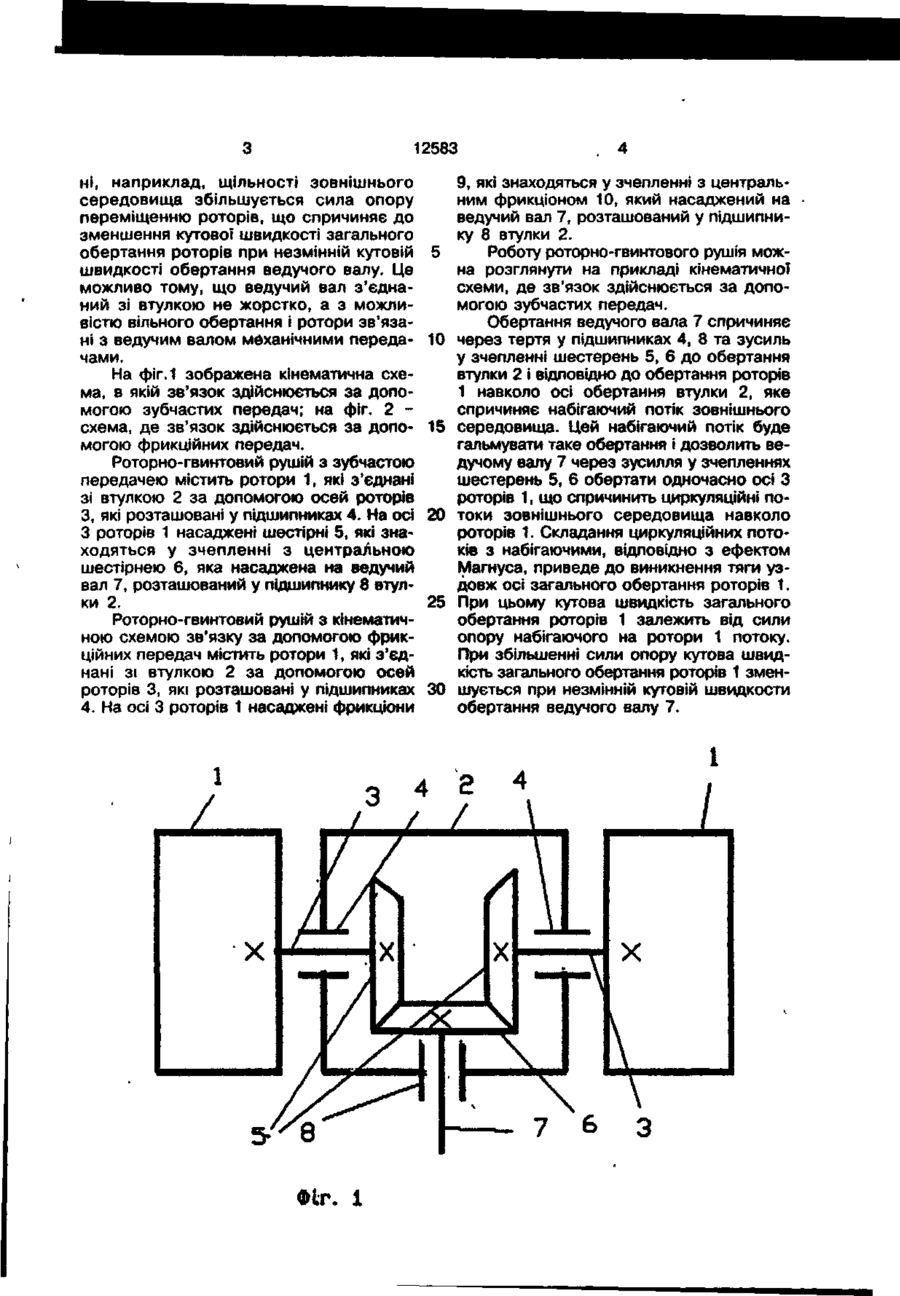
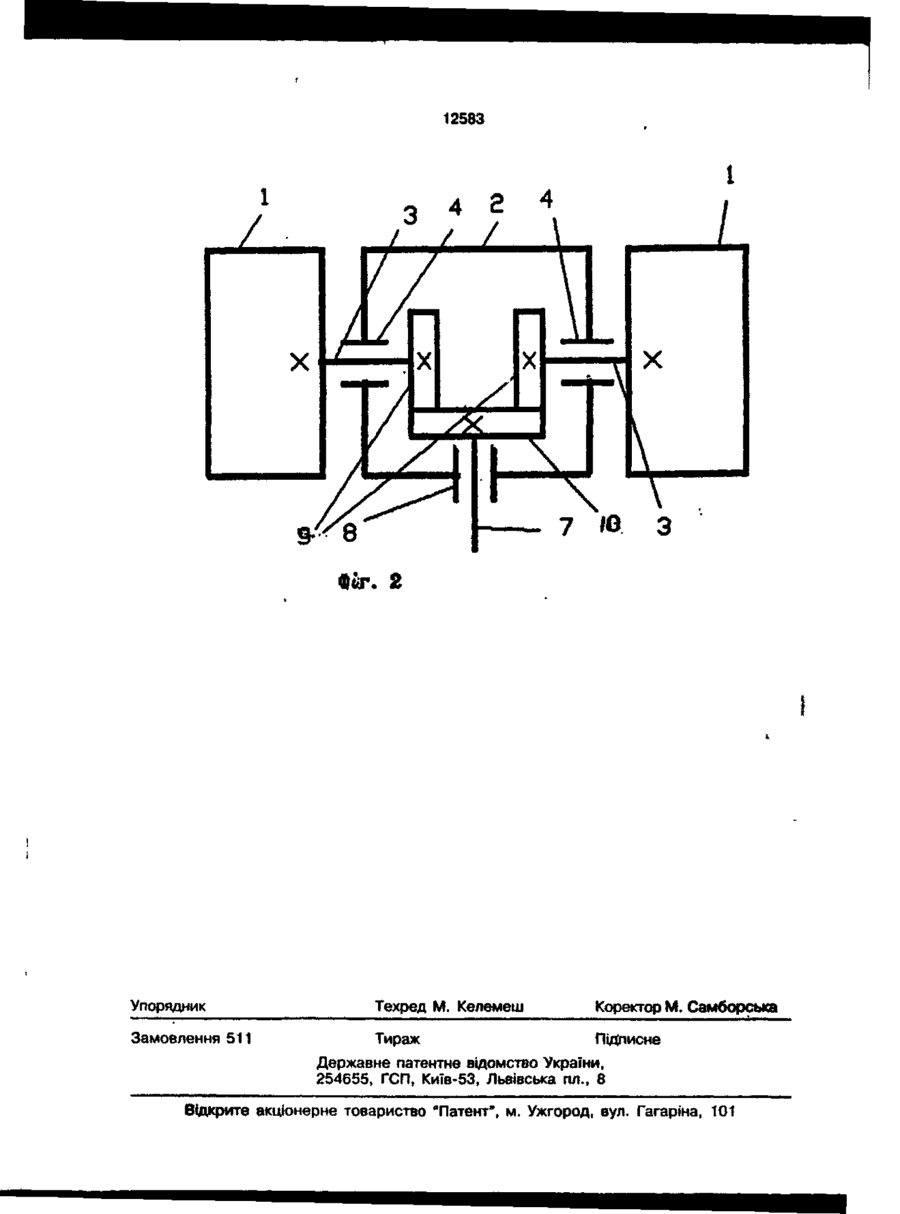
Роторно-пз нтовий рушій, що містить ведучий вал » ротори, які з'єднані зі втулкою з мож ивістю вільного обертання відносно осей симетрії роторів і радіально розташовані відносно ведучого валу, який відрізняється тим, що ведучий вал з'єднаний зі втулкою з можливістю вільного обертання відносно втулки, а ротори зв'язані з ведучим валом механічними передачами Винахід відноситься до транспорту, переважно космічного. Відомий роторно-гвинтовий рушій, який містить ведучий вал і ротори, які з'єднані зі втулкою з можливістю вільного обертання відносно осей симетрії роторів і радіально розташовані відносно ведучого валу. Ротори кінематично за допомогою зубчастих колес зв'язані з зубчастим ободом, який прикріплений до рами установки, а ведучий вал жорстко з'єднаний зі втулкою. Недоліком цієї конструкції є жорстке з'єднання втулки з ведучим валом. При такому з'єднанні кутова швидкість загального обертання роторів не залежить від навколишнього середовища, а залежить тільки від кутової швидкості обертання ведучого валу [1]. В основу винаходу поставлено завдання вдосконалення роторно-гвинтового рушія шляхом здійснення "м'якого" кінематичного зв'язку між елементами рушія, що дозволяє забезпечити зменшення кутової швидкості загального обертання роторів при зменшенні опору зовнішнього середовища. Це завдання розв'язується тим, що у роторно-гвинтовому рушії, який містить ведучий вал і ротори, які з'єднані зі втулкою з можливістю вільного обертання відносно осей симетрії роторів і радіально розташовані відносно ведучого валу, відповідно винаходу, ведучий вал з'єднаний зі втулкою з можливістю вільного обертання відносно втулки, а ротори зв'язані з ведучим валом механічними передачами. Таке з'єднання забезпечує "м'яку" залежність кутової швидкості загального обертання роторів не тільки від кутової швидкості ведучого валу, але і від стану навколишнього середовища. При збільшен оо о 12583 ні, наприклад, щільності зовнішнього середовища збільшується сила опору переміщенню роторів, що спричиняє до зменшення кутової швидкості загального обертання роторів при незмінній кутовій швидкості обертання ведучого валу. Це можливо тому, що ведучий вал з'єднаний зі втулкою не жорстко, а з можливістю вільного обертання і ротори зв'язані з ведучим валом механічними передачами. На фіг. 1 зображена кінематична схема, в якій зв'язок здійснюється за допомогою зубчастих передач; на фіг. 2 схема, де зв'язок здійснюється за допомогою фрикційних передач. Роторно-гвинтовий рушій з зубчастою передачею містить ротори 1, які з'єднані зі втулкою 2 за допомогою осей роторів 3, які розташовані у підшипниках 4. На осі З роторів 1 насаджені шестірні 5, які знаходяться у зчепленні з центральною шестірнею 6, яка насаджена на ведучий вал 7, розташований у підшипнику 8 втулки 2. Роторно-гвинтовий рушій з кінематичною схемою зв'язку за допомогою фрикційних передач містить ротори 1, які з'єднані зі втулкою 2 за допомогою осей роторів 3, які розташовані у підшипниках 4. На осі 3 роторів 1 насаджені фрикціони Фіг. 1 5 10 15 20 25 30 9, які знаходяться у зчепленні з центральним фрикціоном 10, який насаджений на ведучий вал 7, розташований у підшипнику 8 втулки 2. Роботу роторно-гвинтового рушія можна розглянути на прикладі кінематичної схеми, де зв'язок здійснюється за допомогою зубчастих передач. Обертання ведучого вала 7 спричиняє через тертя у підшипниках 4, 8 та зусиль у зчепленні шестерень 5, 6 до обертання втулки 2 і відповідно до обертання роторів 1 навколо осі обертання втулки 2, яке спричиняє набігаючий потік зовнішнього середовища. Цей набігаючий потік буде гальмувати таке обертання і дозволить ведучому валу 7 через зусилля у зчепленнях шестерень 5, 6 обертати одночасно осі З роторів 1, що спричинить циркуляційні потоки зовнішнього середовища навколо роторів 1. Складання циркуляційних потоків з набігаючими, відповідно з ефектом Магнуса, приведе до виникнення тяги уздовж осі загального обертання роторів 1. При цьому кутова швидкість загального обертання роторів 1 залежить від сили опору набігаючого на ротори 1 потоку. При збільшенні сили опору кутова швидкість загального обертання роторів 1 зменшується при незмінній кутовій швидкости обертання ведучого валу 7. 12583 7 Ю. 3 фіг. 2 Упорядник Техред М. Келемеш Замовлення 511 Тираж Коректор М. Самборська Підтіисне Державне патентне відомство України, 254655, ГСП, Київ-53, Львівська пл., 8 Відкрите акціонерне товариство "Патент", м. Ужгород, вул. Гагаріна, 101
ДивитисяДодаткова інформація
Назва патенту англійськоюRotary-screw propeller
Автори англійськоюSynelnyk Anatolii Ivanovych
Назва патенту російськоюРоторно-винтовой движитель
Автори російськоюСинельник Анатолий Иванович
МПК / Мітки
МПК: B64C 11/00, F01C 1/00
Мітки: рушій, роторно-гвинтовий
Код посилання
<a href="https://ua.patents.su/4-12583-rotorno-gvintovijj-rushijj.html" target="_blank" rel="follow" title="База патентів України">Роторно-гвинтовий рушій</a>
Роторно-пульсаційний апарат
Номер патенту: 7802
Опубліковано: 26.12.1995
Автори: Салтан Сергій Семенович, Оренбойм Борис Данилович
МПК: B01F 7/28
Мітки: роторно-пульсаційний, апарат
Формула / Реферат:
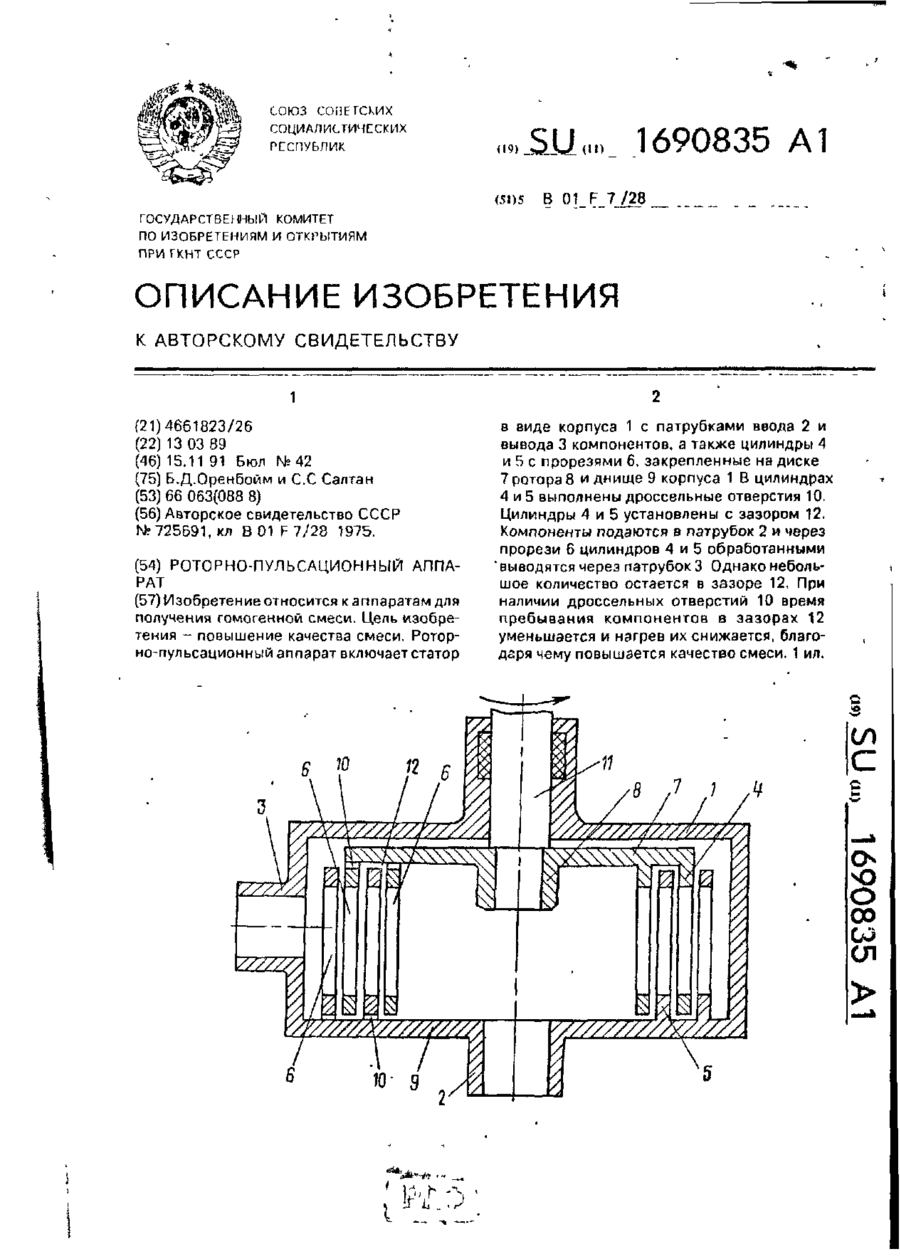
Роторно-пульсационный аппарат, содержащий статор в виде корпуса с патрубками ввода й вывода компонентов, а также коаксиально установленные цилиндры с прорезями, закрепленные на диске ротора и днище статора,'отличающийся тем, что, с целью повышения качества смеси, в стенках цилиндров в местах из закрепления выполнены дроссельные отверстия.
Система змазування роторно-поршневого компресора

Номер патенту: 26043
Опубліковано: 26.02.1999
Автори: Козловський Юрій Костянтинович, Щелкун Анатолій Вікторович, Корнієнко Микола Микитович
МПК: F04C 29/02
Мітки: змазування, компресора, роторно-поршневого, система
Формула / Реферат:
Система смазки роторно-поршневого компрессора, содержащая установленную в картере на валу маслоразбрызгивающую шайбу и выполненный в неподвижной шестерне, расположенной между рабочей полостью и картером, наклонный канал для подачи смазывающей среды в зацепление ротора и шестерни, отличающаяся тем, что, с целью повышения экономичности, система снабжена выполненным в картере соосно с валом сквозным каналом для подачи смазывающей среды и...
Роторно-поршневий насос джуренка

Номер патенту: 5660
Опубліковано: 28.12.1994
Автор: Джуренко Володимир Климович
Мітки: роторно-поршневий, насос, джуренка
Формула / Реферат:
1. Роторно-поршневой насос, содержащий корпус с неподвижными разделительными и всасывающими и нагнетательными патрубками, соосно установленный в нем с возможностью возвратно-поступательного движения и образованием робочих полостей ротор с поршнями и торцевые крышки, отличающийся тем, что он снабжен коллекторами подвода и отвода рабочей среды, корпус выполнен с фланцем для крепления со стороны одной из торцевых крышек, ротор выполнен в виде...
Роторно-пульсаційний апарат
Номер патенту: 9718
Опубліковано: 30.09.1996
Автори: Шварцман Леонід Моісеєвич, Сургай Віталій Григорович, Аслаханов Асламбек Ахмедович
МПК: B01F 7/28
Мітки: роторно-пульсаційний, апарат
Формула / Реферат:
1. Роторно-пульсационный аппарат, включающий корпус, соосно размещенные в корпусе диски ротора и статора с чередующимися между собой выступами, расположенными по концентрическим окружностям, патрубки ввода перемешиваемых компонентов и вывода готовой смеси, выполненные в статоре каналы, соединенные с одним из патрубков ввода, устройство подогрева компонентов смеси и крыльчатку, связанную с валом ротора, отличающийся тем, что он...
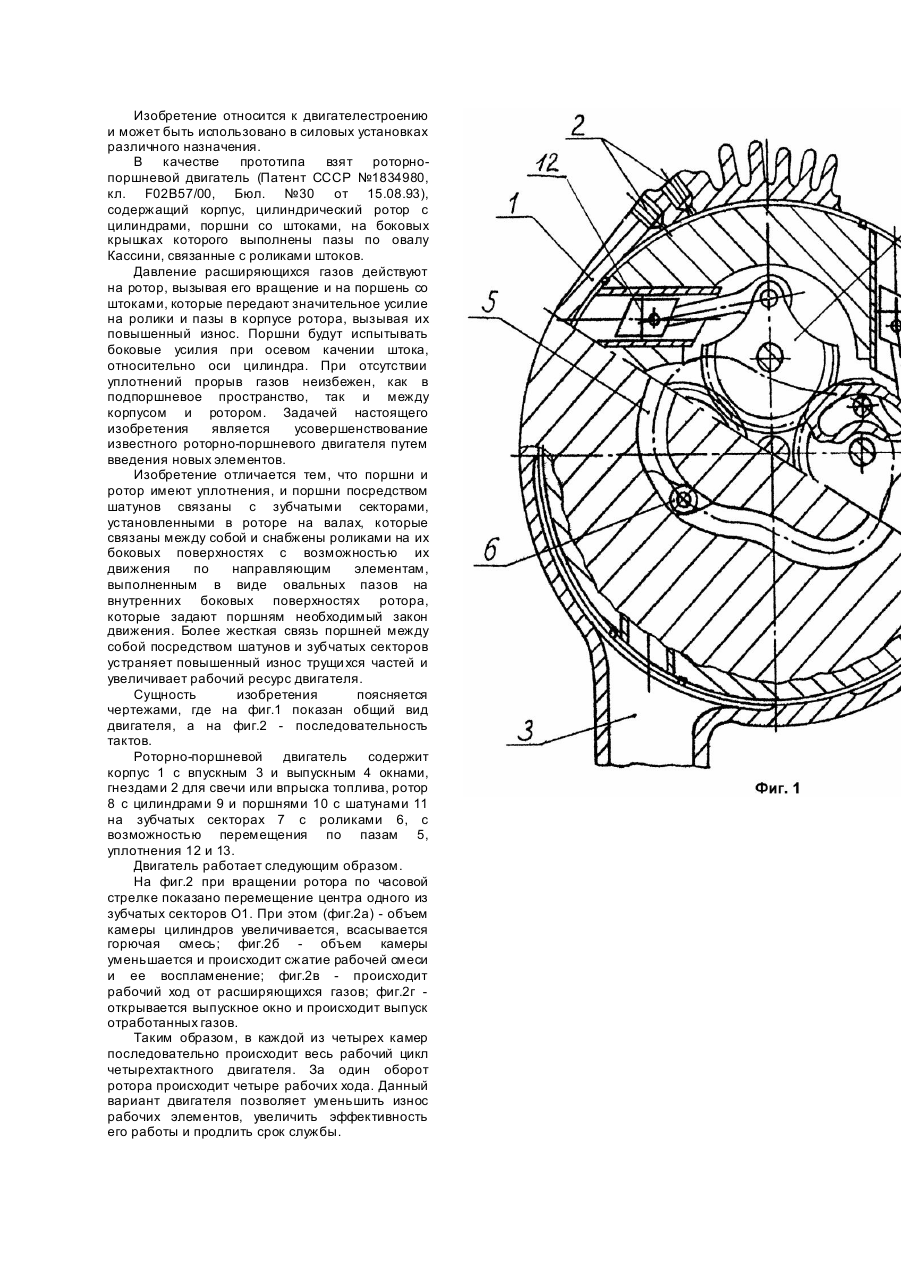
Роторно – поршневий двигун внутрішнього згоряння
Номер патенту: 17069
Опубліковано: 18.03.1997
Автор: Зорічев Юрій Миколайович
МПК: F02B 57/00
Мітки: двигун, згоряння, внутрішнього, роторної, поршневий
Формула / Реферат:
1. Роторно-поршневой двигатель внутреннего сгорания, содержащий корпус с цилиндрической полостью, цилиндрический ротор с цилиндрами, в которых размещены поршни с возможностью возвратно-поступательного движения и направляющий элемент в виде пазов, отличающийся тем, что поршни посредством шатунов связаны с зубчатыми секторами, установленными в роторе на валах и снабженные роликами на их боковых поверхностях, с возможностью их движения по...
Попередній патент: Спосіб реактивного руху
Наступний патент: Рідка фаза інвертного бурового розчину типу “вода в маслі”
Випадковий патент: Біциклічні гетероцикли та лікувальний засіб на їх основі