Пристрій виявлення перешкод сліпими
Номер патенту: 14419
Опубліковано: 15.05.2006
Автори: Сантоній Володимир Іванович, Будіянська Людмила Михайлівна, Іванченко Іраїда Олександрівна
Формула / Реферат
Пристрій виявлення перешкод сліпими, що містить генератор, з'єднаний через електронний ключ паралельно з двома випромінювачами, канал виявлення виступів, з'єднаний послідовно з підсилювачем і фотоприймачем, і забезпечений п'єзовипромінювачем, який відрізняється тим, що він додатково обладнаний паралельно розташованими каналом виявлення провалів і каналом виявлення водних перешкод, при цьому в каналі виявлення провалів до випромінювача послідовно підключений електронний ключ, а до фотоприймача послідовно підключені стробуючий каскад, накопичувач, одновібратор, інтегруючий фільтр, генератор другої частоти і датчик вертикалі, вихід якого з'єднаний зі входом суматора, а в каналі виявлення водних перешкод блок контактних кілець послідовно підключений до модулятора і генератора третьої частоти, вихід якого підключений до входу суматора, крім того, канал виявлення виступів додатково містить послідовно з'єднані стробуючий каскад, одновібратор і генератор першої частоти, при цьому вихід одновібратора з'єднаний з входом суматора, а вихід суматора сполучений з п'єзовипромінювачем, крім того, генератор з'єднаний з каналом виявлення виступів і каналом виявлення провалів через комутатор.
Текст
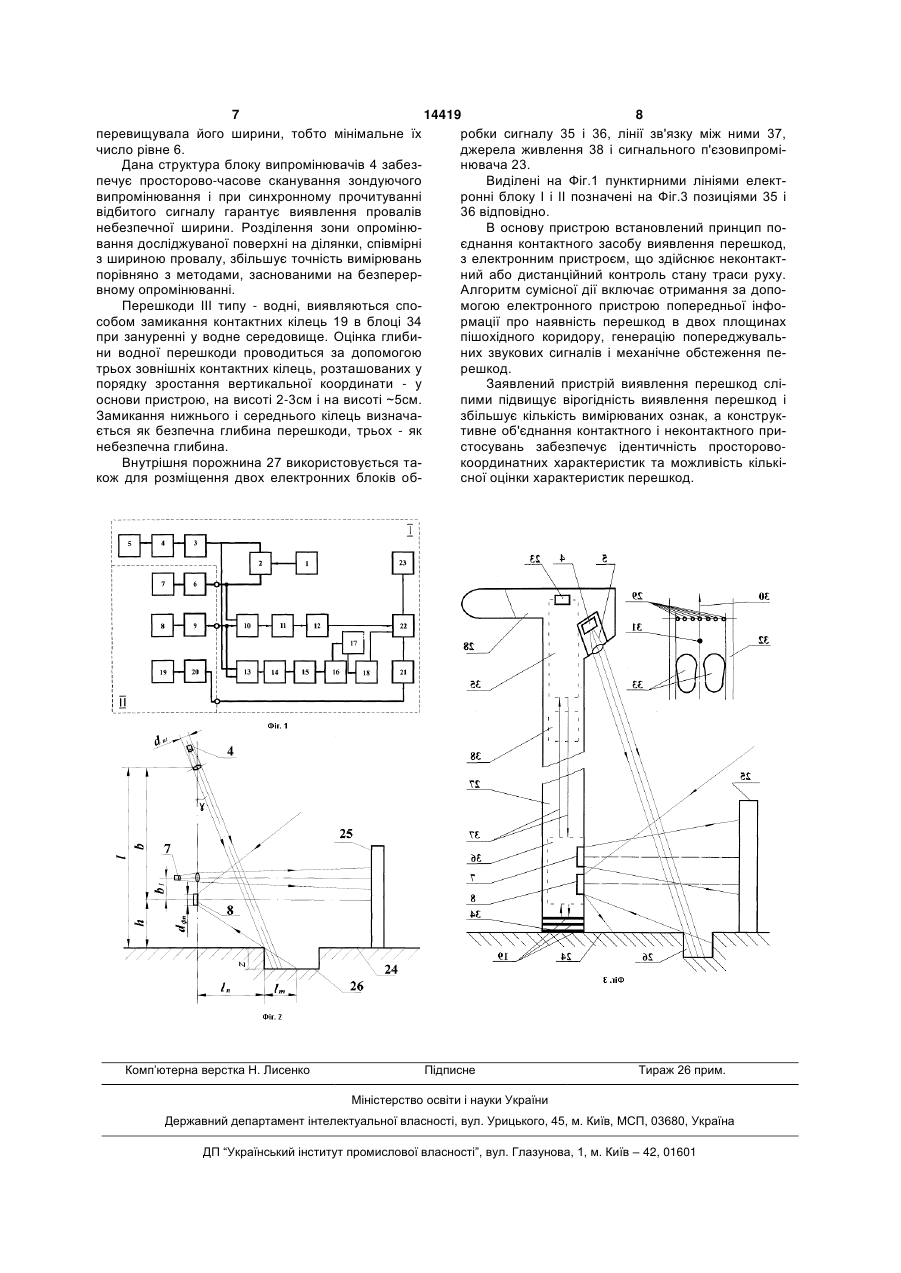
Пристрій виявлення перешкод сліпими, що містить генератор, з'єднаний через електронний ключ паралельно з двома випромінювачами, канал виявлення виступів, з'єднаний послідовно з підсилювачем і фотоприймачем, і забезпечений п'єзовипромінювачем, який відрізняється тим, що він додатково обладнаний паралельно розташованими каналом виявлення провалів і каналом виявлення водних перешкод, при цьому в каналі 3 14419 4 Конструкція даного технічного рішення обрана частоти 12, причому до виходу підсилювачапрототипом. обмежувача 9 послідовно підключені складові каАле недоліком прототипу є те, що за допомоналу виявлення провалів стробуючий каскад 13, гою цього пристрою здійснюється виявлення пенакопичувач 14, одновібратор 15, інтегруючий решкод тільки одного типу - розташованих над фільтр 16, генератор другої частоти 17, датчик поверхнею, по якій переміщається користувач. вертикалі 18, а перший вихід комутатора 2 підклюУ основу корисної моделі поставлено задачу чений до другого входу стробуючого каскаду 13, створити пристрій виявлення перешкод сліпими, в другий вихід комутатора 2 підключений до другого якому за рахунок введення додаткових елементів, входу стробуючого каскаду 10. Канал виявлення зміни схеми з'єднання відомих елементів з новими водних перешкод складається з послідовно з'єделементами забезпечується поліпшення здатності наних блоку контактних кілець 19, модулятора 20 і оптико-електронного пристрою знаходити перешгенератора третьої частоти 21. Виходи генераторів коди шляхом розрізнення з високою точністю нечастоти 12, 17 і 21 підключені до входів суматора безпечних ділянок дороги трьох типів і передачі 22, вихід якого підключений до п'єзовипромінювавипереджаючої інформації звуковими сигналами ча 23. відповідної частоти. Пристрій виявлення перешкод сліпими працює Поставлена задача вирішена в пристрої виявтаким чином: сигнал, що зондує поверхню, з таклення перешкод сліпими, що містить генератор тового генератора 1 через комутатор 2 і електронз'єднаний через електронний ключ паралельно з ні ключі 3 і 6 у вигляді рівних по тривалості і роздідвома випромінювачами, канал виявлення вистулених в часі імпульсів поступає на кожний з пів, з'єднаний послідовно з підсилювачем і фотопвипромінювачів блоку 4 і випромінювач 7, напририймачем і забезпечений п'єзовипромінювачем, клад, з шпаруватістю 25, і випромінюється у витим, що він додатково обладнаний паралельно гляді світлових пучків в напрямах, показаних розташованими каналом виявлення провалів і на Фіг. 2. каналом виявлення водних перешкод, при цьому в Відбитий досліджуваною поверхнею сигнал каналі виявлення провалів до випромінювача посреєструється фотоприймачем 8 і, посилений підлідовно підключений електронний ключ, а до фосилювачем-обмежувачем 9, подається на вхід топриймача послідовно підключені стробуючий двох електронних каналів обробки сигналу фотокаскад, накопичувач, одновібратор, інтегруючий відповіді. фільтр, генератор другої частоти і датчик вертикаУ першому каналі виявлення виступів сигнал лі, вихід якого з'єднаний зі входом суматора, а в фотовідповіді, селектований за часом стробуючим каналі виявлення водних перешкод блок контакткаскадом 10 і сформований по тривалості одновіних кілець послідовно підключений до модулятора братором 11, включає генератор першої частоти і генератора третьої частоти, вихід якого підклю12, що свідчить про наявність виступу. чений до входу суматора, крім того, канал виявУ другому каналі виявлення провалів за наявлення виступів додатково містить послідовно з'єдності сигналу фотовідповіді від всіх випромінюванані стробуючий каскад, одновібратор і генератор чів блоку 4 він селектується за часом стробуючим першої частоти, при цьому, вихід одновібратора каскадом 13 і поступає на вхід накопичувача 14, на з'єднаний з входом суматора, а вихід суматора виході якого формується рівень сигналу, достатній з'єднаний з п'єзовипромінювачем, крім того, генедля запуску одновібратора 15. Імпульси з виходу ратор з'єднаний з каналом виявлення виступів і одновібратора 15, перетворені інтегруючим фільтканалом виявлення провалів через комутатор. ром 16 в постійний сигнал високого рівня, забороНовим у заявленої корисної моделі є те, що няють роботу генератора другої частоти 17 на знак пристрій додатково обладнаний паралельно розвідсутності провалу. ташованими каналом виявлення провалів і канаУ третьому каналі виявлення водних перешкод лом виявлення водних перешкод, завдяки яким застосовується контактний метод. При замиканні у стає можливо проводити кількісну оцінку характеводному середовищі двох або трьох контактів блористик перешкод та отримувати попередню інфоку контактних кілець 19 на виході модулятора 20 рмацію про наявність перешкод. формуються керуючі імпульси з частотами 5 або Суть корисної моделі пояснюється креслення10 Гц відповідно, які включають генератор третьої ми, де зображені: частоти 21. На Фіг.1 - функціональна схема пристрою, що Сигнали з виходу першого і третього каналів заявляється. виявлення перешкод безпосередньо поступають На Фіг.2 - оптико-геометрична модель причерез суматор 22 на п'єзовипромінювач 23. Сигнал строю. з виходу другого каналу проходить на суматор 22 На Фіг.3 - структурна схема пристрою. через датчик вертикалі 18, блокуючий сигнал у Пристрій виявлення перешкод сліпими скларазі відхилення пристрою від вертикалі на кут, що дається з послідовно з'єднаних тактового генераперевищує 20° і що виключає, таким чином, помитора 1, комутатора 2, електронного ключа 3, блоку лкові спрацьовування при виявленні провалів в випромінювачів 4 з оптичною системою 5, причому результаті виходу світлових плям випромінювачів до другого виходу комутатора 2 послідовно підкблоку 4 із поля зору фотоприймача 8. лючені електронний ключ 6 і випромінювач 7, Для надання допомоги сліпим створено багаприймальна частина каналу виявлення виступів тофункціональний пристрій, що базується на синскладається з послідовно підключених фотоприйтезі відомих і оригінальних методів виявлення пемача 8, підсилювача-обмежувача 9, стробуючого решкод і забезпечує як найповніше сприйняття каскаду 10, одновібратора 11, генератора першої умов переміщення користувача. 5 14419 6 Аналіз можливих дорожних ситуацій дозволив Здатність виявлення провалу визначається виділити 3 основні види перешкод: залежністю між висотою розташування фотоприйІ тип - виступи, стіни, бордюри, труби, стрижні і мача, віддаленістю провалу, довжиною тіньової т.п. (у вертикальній площині); зони, що завдовжки утворюється, з одного боку, і II тип - провали, ями, нахили, сходи та ін. (на глибиною провалу z - з іншого боку, що має настугоризонтальній поверхні); пний вигляд (див. Фіг.2) III тип - калюжі (водні). Приведена класифікаhlm z (1) ція перешкод визначає мінімальний круг функціоln нальних задач, що стоять перед пристроєм їх виВиходячи з умов забезпечення безпеки, ln відявлення і розрізнення. повідає довжині кроку користувача, а lm визначаОрієнтування сліпих при ходьбі здійснюється в ється проекційними характеристиками випромінюрезультаті формування оптичними методами двох вача. зон огляду: дальньої - для визначення виступів по Висота розташування блоку випромінювачів 4, пороговому методу, і ближньої - для визначення виходячи з необхідності забезпечення максимальпровалів по базовому методу у відповідність із ної вимірювальної бази b між ним і фотоприймаспіввідношеннями геометричної моделі ходу світчем 8, відповідає довжині пристрою l, звідки лових променів в оптико-електронному блоці приb=1-h (2) строю, показаної на Фіг.2 Кут відхилення γ оптичної осі випромінювача z hlm ; b=h-l; ln l arctg n , l де z - глибина провалу, h - висота розташування фотоприймача, lm - довжина тіньової зони, ln - віддаленість провалу, b - вимірювальна база, l довжина пристрою, γ - кут між оптичною віссю випромінювача і віссю пристрою. Контактний метод застосовується для виявлення водних перешкод. Приймально-випромінювальна система пристрою працює в ближній інфрачервоній ділянці спектру на довжині хвилі λ=900нм і складається з блоку випромінювачів 4 і дискретного випромінювача 7 для ближньої і дальньої зони відповідно і одного фотоприймача 8. Блок випромінювачів 4 оптично узгоджується з оптичною системою 5 таким чином, що формує лінійну послідовність світлових плям на поверхні 24, а випромінювач 7 опромінює площину 25, нормальну до поверхні 24. Фотоприймач 8, що розташовується під випромінювачами на загальній вертикалі і вільний від фокусуючої оптики, займає геометричне положення, що забезпечує включення в його поле зору відбитих світлових плям з дальньої і ближньої зон. Часова послідовність зміни вихідного сигналу фотоприймача 8 при зближенні з перешкодами різного типу така. За наявності перешкоди у вертикальній площині 25 в дальній зоні настройки випромінювача 7 з'являється зображення світлової плями на чутливому майданчику фотоприймача 8. Зважаючи на крихту вимірювальної бази 6, світлова пляма випромінювача 7 не виходить за межі поля зору фотоприймача 8, а зміна амплітуди відбитого сигналу підкоряється закону зворотних квадратів відстаней, що відповідає амплітудному методу вимірювань. Вхід в ближню зону зв'язаний з виявленням провалів. У відсутність порушень поверхні 24 фотоприймач 8 приймає випромінювання блоку випромінювачів 4, відбитого з ближньої зони. Провал 26 поверхні 24 приводить до виходу одного або декількох світлових плям з поля зору і, відповідно, їх зображень - з майданчика фотоприймача 8, що супроводжується зміною рівня сигналу фотовідповіді. При цьому передня кромка провалу 26 виконує роль екрану, що формує тіньову зону у полі зору фотоприймача 8. від осі пристрою, нормальної до горизонтальної поверхні, забезпечує проходження потоку випромінювання в тіньову зону, минувши кромку провалу, при цьому l arctg n l (3) Рівняння (1)-(3) дозволяють провести розрахунок пристрою, здатного знаходити провал. Наприклад, з урахуванням середньої довжини кроку користувача, безпечна віддаленість провала, ln0,25м. Мінімально можлива довжина тіньової зони lm рівна довжині проекції світлової плями, яка на дальності 1 м не перевищує двох діаметрів du оптичної системи 5 блоку випромінювачів 4. Якщо du=0,02м, то lm≤0,04м. Тоді, розташувавши фотоприймач 8 на висоті h=0,50м, згідно рівнянню (1), можливо виявлення провалу глибиною z≈0,08м. Рішення зворотної задачі - розрахунку положення фотоприймача 8, виходячи з необхідності виявлення провалу безпечної глибини, наприклад, z=0,05м, дає значення h=0,31м. Запропонований пристрій може виглядати, як зображено на Фіг. 3. Передбачена координатна прив'язка по рівняннях (1)-(3) для блоку випромінювачів 4 ближньої і випромінювача 7 дальньої зон вимірювань і фотоприймача 8. При цьому здійснюється взаємодія випромінюваних потоків з порушеннями поверхні 24 у вигляді виступів 25 або провалів 26 по зображеній схемі. Блок випромінювачів 4 ближньої зони з відповідною оптичною системою 5 вбудовується в ручку 28, наприклад пристрою 27 та здійснює просторове орієнтування полів зору приймальновипромінювальної системи. Розташування блоку випромінювачів 4 відносно оптичної системи 5 таке, що утворювані ними на земній поверхні світлові плями 29 розміщуються на лінії, перпендикулярній напряму руху 30 користувача (31 - положення кінця пристрою на земній поверхні). Відстань між крайніми світловими плямами рівна ширині пішохідного коридору 32, що складає практично дві ширини стопи користувача 33. Якщо вважати безпечним провал ширше ніж в півстопи, то кількість випромінювачів в блоці випромінювачів 4 повинна бути такою, щоб просторова періодичність світлових плям на зондованій поверхні не 7 14419 8 перевищувала його ширини, тобто мінімальне їх робки сигналу 35 і 36, лінії зв'язку між ними 37, число рівне 6. джерела живлення 38 і сигнального п'єзовипроміДана структура блоку випромінювачів 4 забезнювача 23. печує просторово-часове сканування зондуючого Виділені на Фіг.1 пунктирними лініями електвипромінювання і при синхронному прочитуванні ронні блоку І і II позначені на Фіг.3 позиціями 35 і відбитого сигналу гарантує виявлення провалів 36 відповідно. небезпечної ширини. Розділення зони опромінюВ основу пристрою встановлений принцип повання досліджуваної поверхні на ділянки, співмірні єднання контактного засобу виявлення перешкод, з шириною провалу, збільшує точність вимірювань з електронним пристроєм, що здійснює неконтактпорівняно з методами, заснованими на безперерний або дистанційний контроль стану траси руху. вному опромінюванні. Алгоритм сумісної дії включає отримання за допоПерешкоди III типу - водні, виявляються спомогою електронного пристрою попередньої інфособом замикання контактних кілець 19 в блоці 34 рмації про наявність перешкод в двох площинах при зануренні у водне середовище. Оцінка глибипішохідного коридору, генерацію попереджувальни водної перешкоди проводиться за допомогою них звукових сигналів і механічне обстеження петрьох зовнішніх контактних кілець, розташованих у решкод. порядку зростання вертикальної координати - у Заявлений пристрій виявлення перешкод сліоснови пристрою, на висоті 2-3см і на висоті ~5см. пими підвищує вірогідність виявлення перешкод і Замикання нижнього і середнього кілець визначазбільшує кількість вимірюваних ознак, а конструкється як безпечна глибина перешкоди, трьох - як тивне об'єднання контактного і неконтактного принебезпечна глибина. стосувань забезпечує ідентичність просторовоВнутрішня порожнина 27 використовується такоординатних характеристик та можливість кількікож для розміщення двох електронних блоків обсної оцінки характеристик перешкод. Комп’ютерна верстка Н. Лисенко Підписне Тираж26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for detecting obstacles by blind people
Автори англійськоюSantonii Volodymyr Ivanovych, Ivanchenko Iraida Oleksandrivna, Budianska Liudmyla Mykhailivna
Назва патенту російськоюУстройство выявления препятствий слепыми
Автори російськоюСантоний Владимир Иванович, Иванченко Ираида Александровна, Будиянская Людмила Михайловна
МПК / Мітки
Мітки: пристрій, сліпими, виявлення, перешкод
Код посилання
<a href="https://ua.patents.su/4-14419-pristrijj-viyavlennya-pereshkod-slipimi.html" target="_blank" rel="follow" title="База патентів України">Пристрій виявлення перешкод сліпими</a>
Спосіб створення перешкод роботі імпульсного лазерного далекоміра і пристрій для його здійснення
Номер патенту: 61771
Опубліковано: 17.11.2003
Автори: Кіслова Поліна Федотівна, Кіслов Вячеслав Володимирович
МПК: H03B 29/00, G01S 7/38
Мітки: далекоміра, лазерного, роботи, спосіб, перешкод, здійснення, пристрій, імпульсного, створення
Формула / Реферат:
1. Спосіб створення перешкод роботі імпульсного лазерного далекоміра, що включає прийом оптичного зондувального імпульсного сигналу, формування помилкового оптичного імпульсного сигналу шляхом затримки зондувального імпульсного сигналу, передачу помилкового оптичного імпульсного сигналу в приймальну систему далекоміра, який відрізняється тим, що прийнятий оптичний зондувальний імпульсний сигнал перетворюють в електричний імпульсний сигнал, а...
Пристрій для виявлення предметів на залізничній колії

Номер патенту: 13023
Опубліковано: 15.03.2006
Автори: Осенін Юрій Іванович, Войтенко Володимир Панасович
МПК: B61K 9/00
Мітки: виявлення, предметів, колії, залізничний, пристрій
Формула / Реферат:
Пристрій для виявлення предметів на залізничній колії, який характеризується тим, що містить генератор гармонічних коливань, підключений до акустичного випромінювача, акустичний приймач, приєднаний до резонансного підсилювача, вихід якого з’єднаний із входом амплітудного детектора, підключеного до аналогово-цифрового перетворювача, вихід якого з’єднаний із входом мікроконтролера, підключеного до радіопередавача, приєднаного до передавальної...
Спосіб виявлення підземних об’єктів з борту літального апарату на фоні пасивних перешкод від земної поверхні
Номер патенту: 15946
Опубліковано: 30.06.1997
Автори: Жуков Сергій Анатолійович, Родін Олександр Валерійович, Бахвалов Борис Миколайович
МПК: G01S 17/06
Мітки: виявлення, пасивних, земної, літального, перешкод, апарату, об'єктів, фоні, підземних, поверхні, спосіб, борту
Формула / Реферат:
Способ обнаружения подземных объектов с борта летательного аппарата на фоне пассивных помех от земной поверхности, заключающийся в излучении вертикально вниз с борта летательного аппарата несинусоидальных импульсных зондирующих сигналов наносекундной длительности, и приеме и индикации эхо-сигналов от подземных объектов, отличающийся тем, что излучают периодическую последовательность пары разнополярных видеоимпульсов, а которой второй...
Пристрій автоматичного виявлення
Номер патенту: 37631
Опубліковано: 15.06.2004
Автори: Каспирович Олександр Генадійович, КОНОНОВИЧ ВІКТОР ЯКОВИЧ, Лаврентьєв Володимир Миколайович
МПК: G01S 13/52, G01S 13/00
Мітки: автоматичного, пристрій, виявлення
Формула / Реферат:
Пристрій для автоматичного виявлення, що містить q доплерівських фільтрів, q блоків оцінки доплерівської частоти, q порогових схем, q схем "І", схему "АБО" і бінарний накопичувач, причому входи q доплерівських фільтрів підключені до входу пристрою автоматичного виявлення, а виходи q доплерівських фільтрів підключені до входів відповідних блоків оцінки доплерівської частоти, виходи кожного з яких підключені до входів...
Пристрій для виявлення феромагнітних часток в потоці матеріалу
Номер патенту: 55699
Опубліковано: 15.04.2003
Автори: Федюшко Юрій Михайлович, Борохов Іван Валерійович
МПК: G01F 1/66
Мітки: потоці, феромагнітних, пристрій, матеріалу, часток, виявлення
Формула / Реферат:
Пристрій для виявлення феромагнітних часток в потоці матеріалу, який включає в себе послідовно з'єднані блок живлення, генератор синусоїдальних сигналів, випромінювач, приймач, підсилювальний пристрій, демодулятор, реєструючий прилад, який відрізняється тим, що він додатково оснащений блоком вилучення феромагнітних часток разом з блоком керування, порівнювальним органом сигналу з заданим, задавальним органом границь зміни сигналу,...
Попередній патент: Спосіб комбінованої фармакотерапії бронхолегеневої патології
Наступний патент: Грунтообробне знаряддя
Випадковий патент: Мембранний блок компресора