Пристрій автоматичного виявлення
Номер патенту: 37631
Опубліковано: 15.06.2004
Автори: КОНОНОВИЧ ВІКТОР ЯКОВИЧ, Лаврентьєв Володимир Миколайович, Каспирович Олександр Генадійович

Формула / Реферат
Пристрій для автоматичного виявлення, що містить q доплерівських фільтрів, q блоків оцінки доплерівської частоти, q порогових схем, q схем "І", схему "АБО" і бінарний накопичувач, причому входи q доплерівських фільтрів підключені до входу пристрою автоматичного виявлення, а виходи q доплерівських фільтрів підключені до входів відповідних блоків оцінки доплерівської частоти, виходи кожного з яких підключені до входів послідовно з'єднаних порогової схеми і схеми "І", а виходи q схем "І" з'єднані з входами схеми "АБО", вихід якої підключений до входу бінарного накопичувача, який відрізняється тим, що в нього додатково введені q схем відключення, пристрій формування порогів, пристрій керування, q додаткових порогових схем, додаткова схема "АБО", додатковий бінарний накопичувач, регістр, пристрій суміщення інформації і індикатор, причому виходи бінарної інформації кожного з q блоків оцінки доплерівськоі частоти підключені до входів відповідних схем відключення, виходи яких підключені до других входів відповідних схем "І", а інші входи схем відключення з'єднані з виходом пристрою керування, вхід якого підключений до входу керування пристрою автоматичного виявлення, виходи q доплерівських фільтрів підключені до перших входів відповідних додаткових порогових схем, інші входи додаткових порогових схем підключені до виходу пристрою формування порогів, вхід якого підключений до входу керування відображенням пристрою автоматичного виявлення, виходи додаткових порогових схем з'єднані з входами додаткової схеми "АБО", вихід додаткової схеми "АБО" підключений до входу послідовно з'єднаних додаткового бінарного накопичувача, регістра і пристрою суміщення інформації, перший вхід якого підключений до виходу бінарного накопичувача, а вихід пристрою суміщення інформації підключений до входу індикатора.
Текст
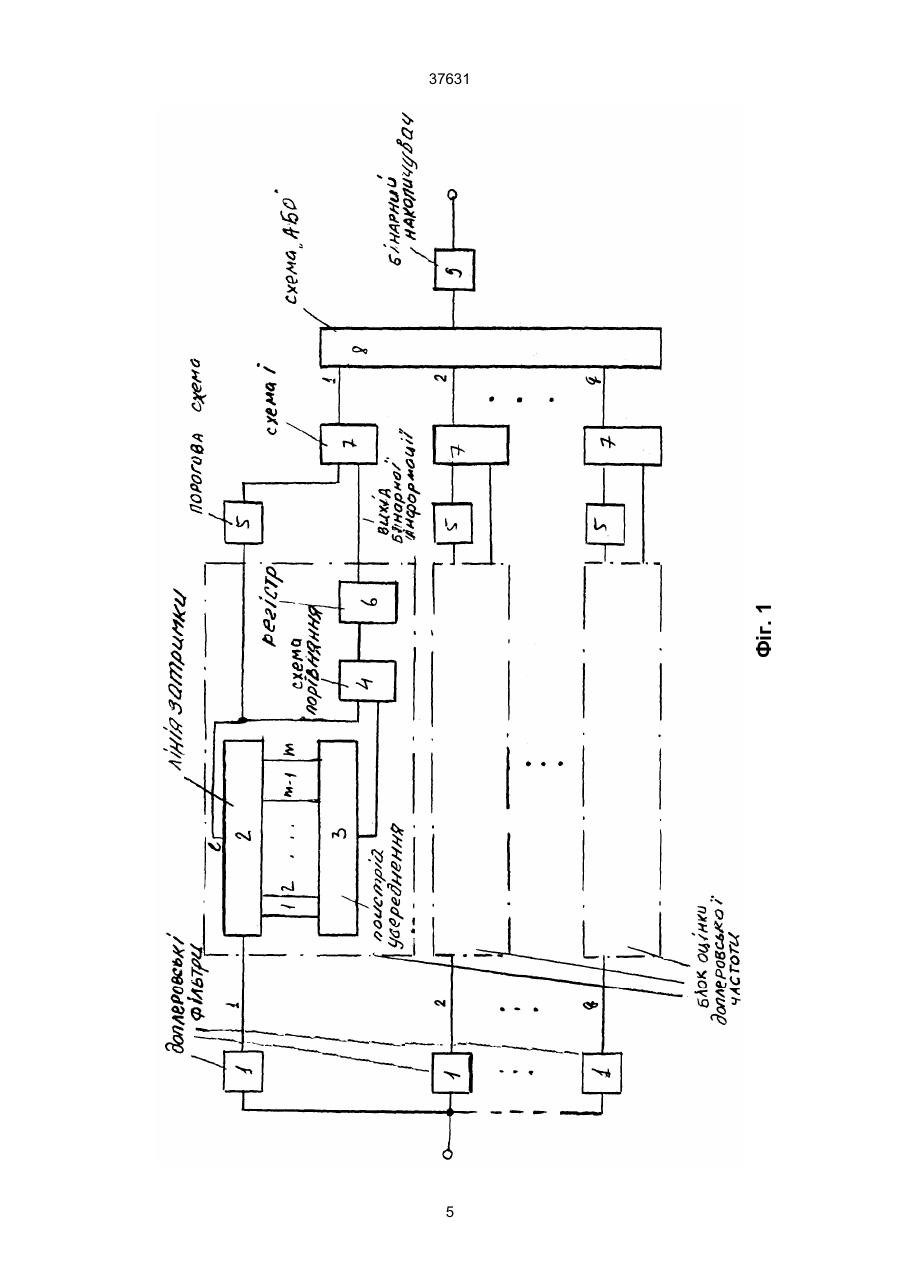
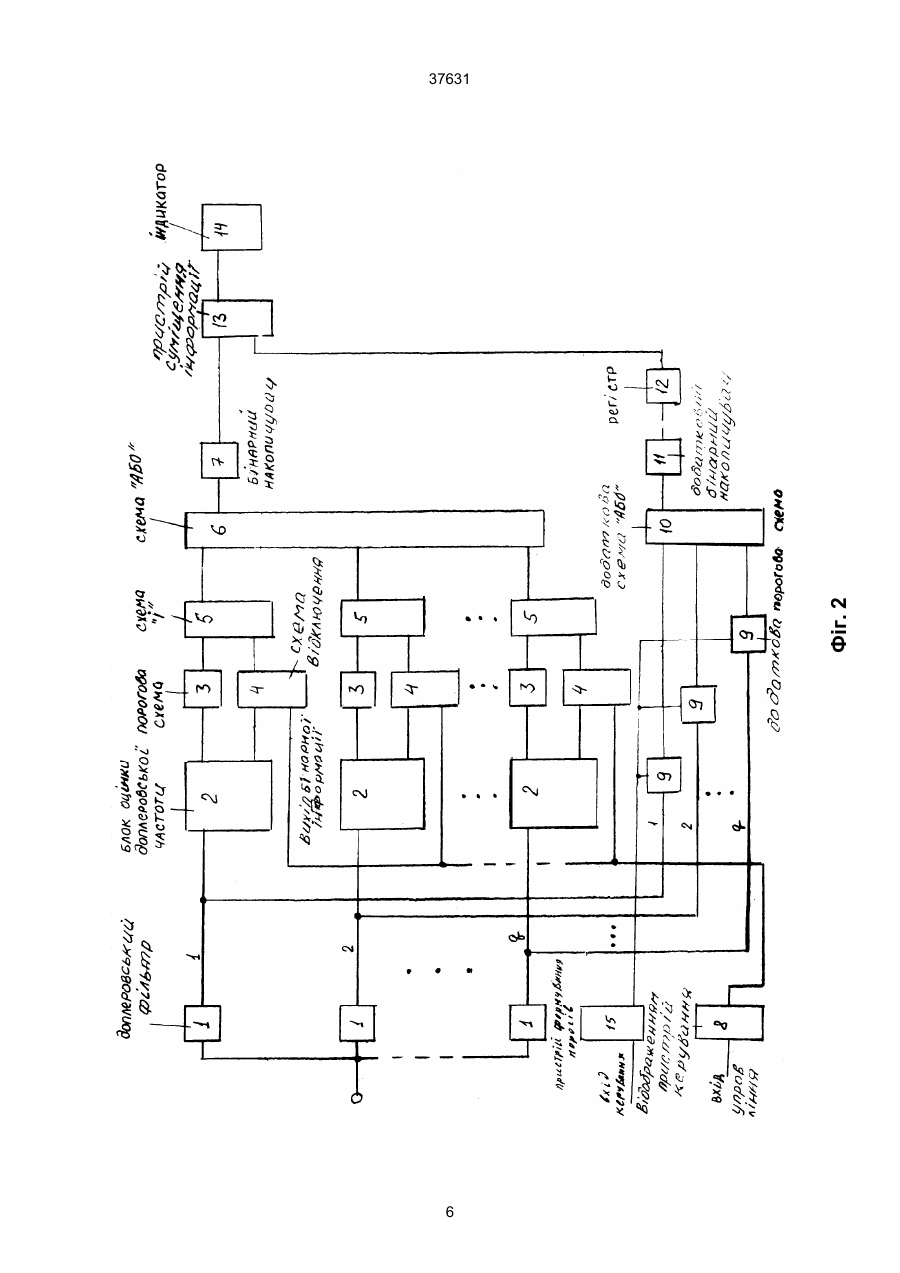
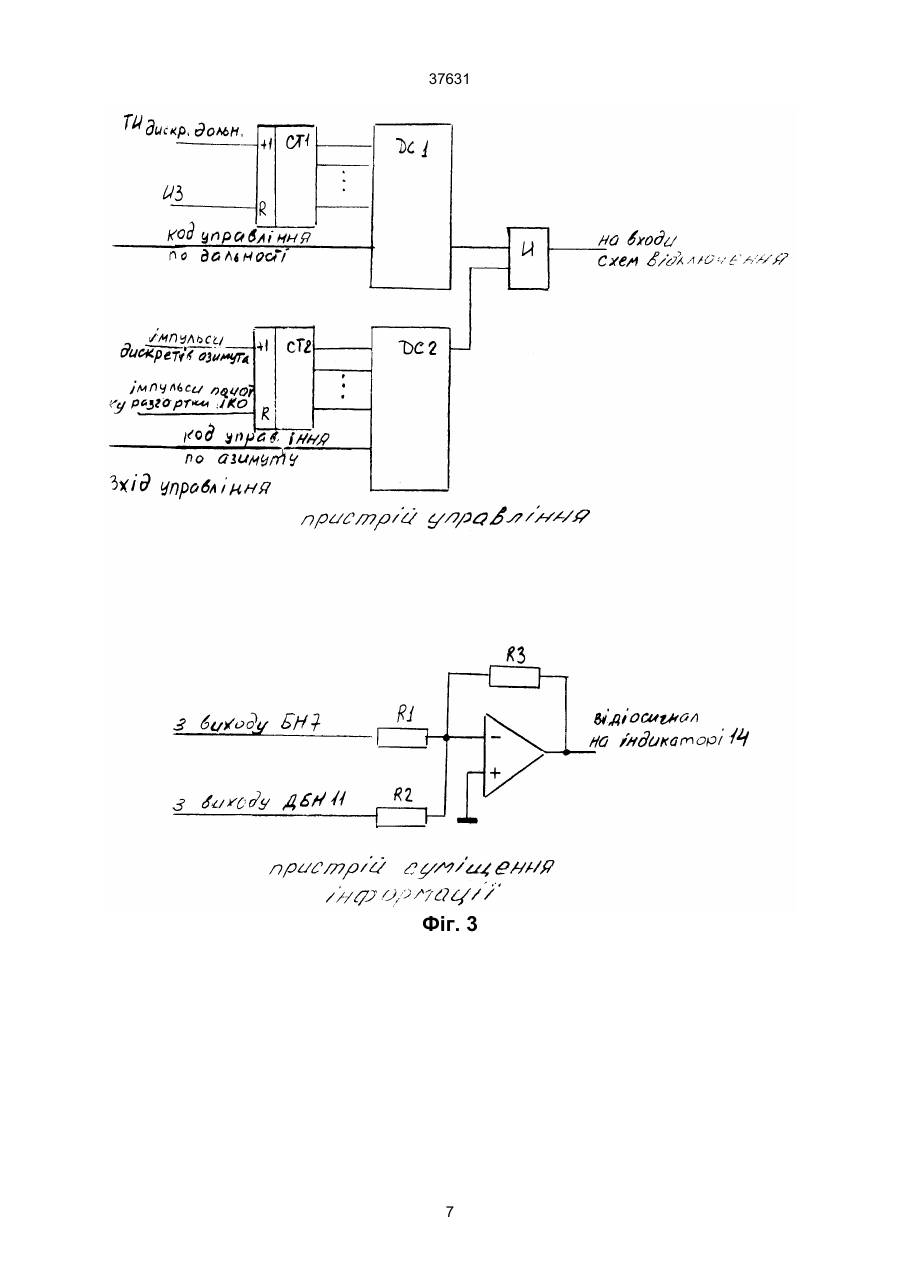
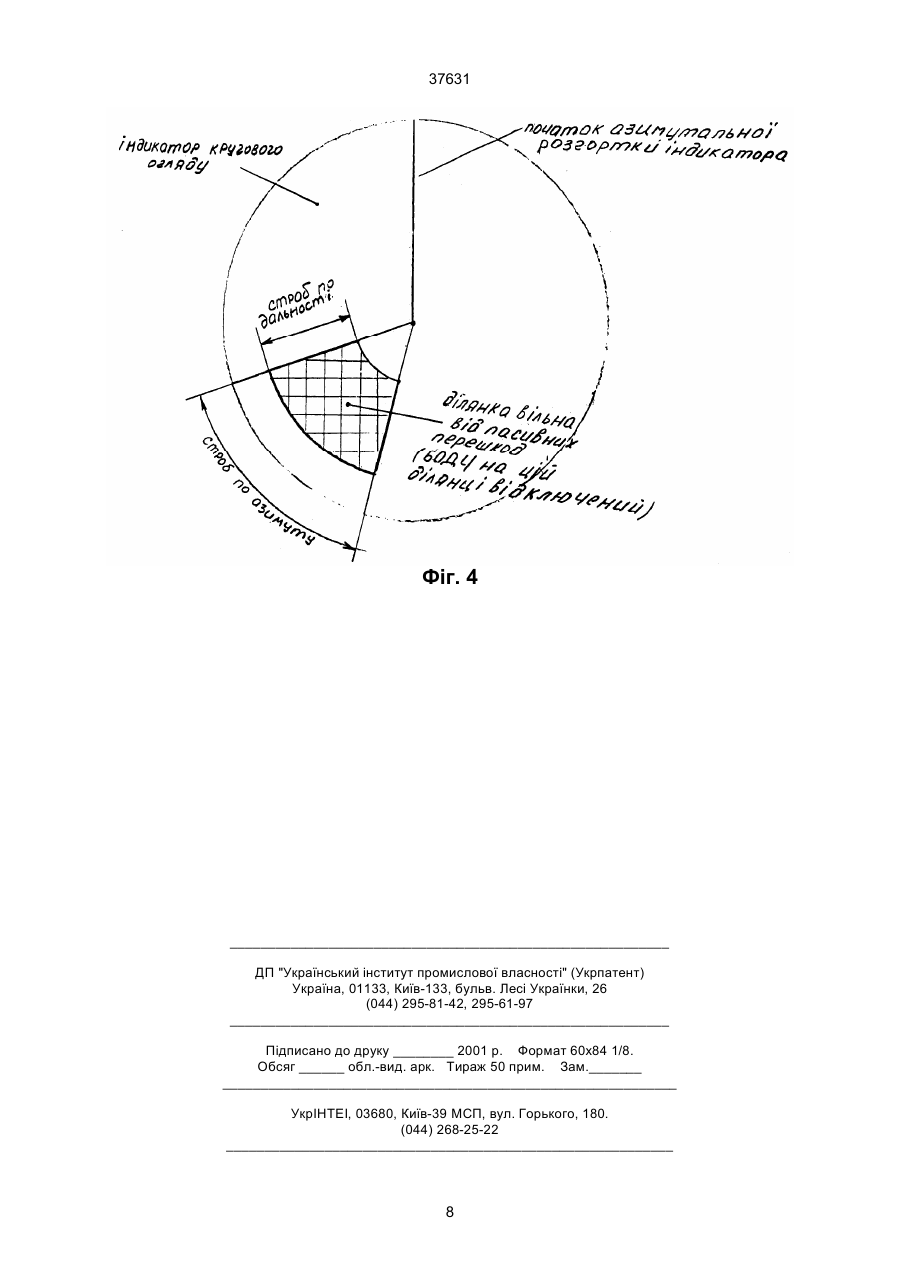
Пристрій автоматичного виявлення, що містить q доплерівських фільтрів, q блоків оцінки доплерівської частоти, q порогових схем, q схем "І”, схему “АБО" і бінарний накопичувач, причому входи q доплерівських фільтрів підключені до входу пристрою автоматичного виявлення, а виходи q дoплepівських фільтрів підключені до входів відповідних блоків уцінки доплерівськоі частоти, виходи кожного з яких підключені до входів послідовно з'єднаних порогової схеми і схеми "І", а виходи q схем "І" з'єднані з входами схеми “АБО", вихід якої підключений до входу бінарного накопичувача, який відрізняється тим, що в нього додатково введені q схем відключення, пристрій формування порогів, пристрій керування, q додаткових порого A (54) ПРИСТРІЙ АВТОМАТИЧНОГО ВИЯВЛЕННЯ 37631 Недоліком прототипу є істотні витрати при виявленні малошвидкісних цілей навіть в областях, вільних від пасивних перешкод і відсутність інформації про навколишні метеорологічні умови із-за того, що описаний пристрій придушує сигнали, відображені від метеоутворювань. В основу винаходу поставлено задачу удосконалення пристрою автоматичного виявлення шляхом додаткового введення q схем відключення, пристрою керування, пристрою формування порогів, q додаткових граничних схем, додаткової схеми "АБО", додаткового бінарного накопичувача, регістру, пристрою суміщення інформації та індикатору, причому виходи бінарної інформації кожного з q блоків оцінки доплерівської частоти підключені до входів відповідних схем відключення, виходи яких підключені до других входів відповідних схем "І", а другі входи схем відключення з'єднані з виходом пристрою керування, вхід якого підключений до входу керування пристрою автоматичного виявлення. Виходи q доплерівських фільтрів підключені до перших входів додаткових відповідних порогових схем, другі входи додаткових порогових схем підключені до виходу пристрою формування порогів, вхід якого підключений до входу керування відображенням пристрою автоматичного виявлення, виходи додаткових порогових схем з'єднані з входами додаткової схеми "АБО. Вихід додаткової схеми "АБО" підключений до входу послідовно з'єднаних додаткового бінарного накопичувача, регістру і пристрою суміщення інформації, перший вхід якого підключений до виходу бінарного накопичувача, а вихід пристрою суміщення інформації підключений до входу індикатора, що забезпечує зниження втрат виявлення і поліпшення за рахунок цього проводки малошвидкісних цілей в областях простору, вільних від пасивних перешкод, а також поліпшення безпеки польотів за рахунок відображення на екрані індикатора нарівні з позначками цілей інформації про метеорологічні умови. Причинно-наслідковий зв'язок між сукупністю ознак, що пропонуються, та технічним результатом полягає у наступному. Введення вище перелічених пристроїв з відповідними зв'язками дає можливість поряд з відмітками цілей відображати на індикаторі інформацію про просторове розташування пасивних перешкод. При цьому оператор РЛС має змогу оперативно визначити межі зон вільних від пасивних перешкод і вводити одержану інформацію у пристрій управління. При цьому в областях вільних від пасивних перешкод забезпечується виявлення повітряних об'єктів незалежно від їх радіальної швидкості, що дозволяє знизити втрати при виявленні цілей. Крім того, обравши за допомогою пристрою формування порогів відповідний режим відображення перешкоджаючої обстановки, оператор може стежити на екрані за метеоумовою в зоні дій РЛС. Оперативна Інформація про небезпечні погодні явища дозволяє суттєво підвищити безпечність польотів. Запропонований пристрій пояснюється кресленнями. На фіг.1 надана узагальнена блок-схема прототипу. На фіг.2 наведена блок-схема пристрою автоматичного виявлення. На фіг. 3 показані приклади конкретного виконання пристрою ке рування і пристрою суміщення інформації. На фіг 4 показаний екран індикатора кругового огляду, на якому сформована ділянка, де відключений блок оцінки доплерівської частоти. Пристрій автоматичного виявлення містить (фіг.2) q доплерівських фільтрів 1, q блоків оцінки доплерівської частоти (БОДЧ) 2, що містять вхід, вихід і вихід бінарної інформації, q порогових схем 3, q схем відключення 4, q схем "І" 5, схему "АБО" 6, бінарний накопичувач (БН) 7, пристрій керування 8, q додаткових порогових схем (ДПС) 9, додаткову схему "АБО" 10, додатковий бінарний накопичувач (ДБН) 11, регістр 12, пристрій суміщення інформації (ПСІ) 13, індикатор 14 і пристрій формування порогів (ПФП) 15. До входу пристрою автоматичного виявлення підключені входи q доплерівських фільтрів 1, виходи яких підключені до входів відповідних q БОДЧ 2 і першим входам q додаткових порогових схем 9, другі входи додаткових порогових схем 9 підключені до виходу пристрою формування порогів 15, вхід якого підключений до входу керування відображенням пристрою автоматичного виявлення, виходи q БОДЧ 2 з'єднані з входами відповідних q порогових схем 3, а виходи бінарної інформації кожного з БОДЧ 2 з'єднані з першими входами відповідних схем відключення 4, другі входи яких підключені до виходу пристрою керування 8, вхід якого з'єднаний із входом керування пристрою автоматичного виявлення, виходи кожної із q схем відключення 4 підключені до входів відповідних схем "І" 5, другі входи кожної з яких з'єднані з виходами відповідних порогових схем 3, виходи q схем "І" 5 підключені до входів схеми "АБО" 6, вихід якої через бінарний накопичувач 7 підключений до другого входу пристрою суміщення інформації 13. Виходи q додаткових порогових схем 9 підключені до входів додаткової схеми "AБО" 10, вихід якої підключений до входу послідовно з'єднаних додаткового бінарного накопичувача 11, регістра 12 і пристрою суміщення інформації 13, вихід якого підключений до входу індикатора 14. Запропонований пристрій автоматичного виявлення працює таким чином. На входи доплерівських фільтрів 1 надходить сигнал із виходу приймального пристрою імпульсно-доплерівської РЛС із вобулірованою частотою повторення зондуючих імпульсів. Зміна частоти повторення зондуючих імпульсів, відбувається через кожні q періодів імпульсів запуску. Частоти повторення зондуючих імпульсів обрані таким чином, щоб опромінення цілі робилося при декількох різних частотах повторення. У доплерівських фільтрах і протягом q періодів повторення імпульсів запуску здійснюється розфільтровка вхідного сигналу на q доплерівських каналів у кожному дискреті дальності. З виходу кожного доплерівського фільтру 1 відфільтрований сигнал надходить на вхід відповідного БОДЧ 2 і вхід додаткової порогової схеми 9. У блоці оцінки доплерівської частоти 2 відбувається режекція відгуків сигналів із виходу відповідного доплерівського фільтру, у випадку, якщо відфільтрований сигнал має низьку доплерівську частоту. Якщо ж відгук на виході фільтру має високу доплерівську частоту, то режекція його не відбувається, і на виході бінарної інформації блоку оцінки доплерівської частоти 2 формується ознака 2 37631 високої частоти у вигляді "лог.1”. У той же момент часу з виходу блока оцінки доплерівської частоти 2 на вхід порогової схеми 3 надходить амплітуда відфільтрованого сигналу. У пороговій схемі 3 робиться порівняння амплітуди від-фільтрованого сигналу з заданим енергетичним порогом виявлення. Як порогову схему 3 найбільш доцільно використовувати стабілізатор рівня помилкових тривог (див. авт. свід. № 117909). Якщо амплітуда відфільтрованого сигналу перевищить енергетичний поріг виявлення, на вході порогової схеми 3 формується ознака перевищення у вигляді "лог.1", яка у свою чергу надходить на перший вхід схеми "І" 5. На її другий вхід через схему відключення 4 надходить ознака високої частоти. Таким чином, якщо виділений у даному фільтрі сигнал має достатню амплітуду і його доплерівська частота перевищує порогове значення, на обох виходах схеми "І" 5 присутні "лог.1". При цьому на виході схеми "І" 5 формується у виді "лог.1" ознака, що показує, що в даному дискреті дальності можлива наявність рухомої цілі. Сигнали з виходів q схем "І" 5 логічно підсумовуються за допомогою схеми "АБО" 6 і надходять на вхід бінарного накопичувала 7. Бінарний накопичувач 7 використовується для прийняття остаточного рішення про наявність або відсутність цілі шляхом аналізу прийнятої протягом усього часу опромінення цілі при декількох частотах повторення зондуючих імпульсів. Як бінарний накопичувач 7 може бути використана схема бінарного інтегратора (див.: Клюєв М.Ф. Виявлення імпульсних сигналів за допомогою накопичувачів дискретної дії. - М.: Рад. радіо, 1963. - С.45). Таким чином, запропонований пристрій дозволяє придушувати пасивні перешкоди і виявляти рухомі цілі, радіальна швидкість яких вище деякого порогового значення. Однак у зоні огляду РЛС практично завжди існують області, вільні від перешкод, усередині котрих немає необхідності виключати з опрацювання сигнали з малою доплерівською частотою. У таких зонах можливо виявлення цілей, радіальна швидкість яких нижче порогової. Для цього запропонований пристрій дозволяє робити оперативний аналіз реальної порешкодової обстановки для визначення й уточнення меж областей, вільних від пасивних перешкод, і відключати блок оцінки доплерівської частоти 2 при виявленні сигналів у тих дискретах дальності і (або) азимуту, що належать області, вільній від пасивних перешкод. Відключення блоку оцінки доплерівської частоти 2 робиться за допомогою пристрою керування 8 і схеми відключення 4. Для аналізу перешкоджаючої обстановки використовується q додаткових порогових схем 9, додаткова схема "АБО" 10, додатковий бінарний накопичувач 11, регістр 12 і пристрій суміщення інформації 13, індикатор 14 і пристрій формування порогів 15. Виявлення цілей в областях вільних від пасивних перешкод відбувається таким чином. З виходів доплерівських фільтрів 1 розфільтрований сигнал надходить на входи додаткових порогових схем 9. Додаткові порогові схеми 9 роблять порівняння амплітуди сиг налів з виходів доплерівських фільтрів із заданими пороговими рівнями. Розмір порогових рівнів при цьому встановлюється відповідно до енергетичних порогів, заданих у порогових схемах 3. Як додаткові порогові схеми 9 можуть бути використані схеми порівняння, наприклад, виконані на мікросхемах 533СПІ. Ознаки перевищення розфільтрованим сигналом порогових рівнів, що надходять на другі входи додаткових порогових схем 9 з вихода пристрою формування порогів, логічно підсумовуються за допомогою додаткової схеми "АБО" 10. З виходу додаткової схеми "АБО" 10 сумарний сигнал перевищення надходить на вхід додаткового бінарного накопичувача 11. Додатковий бінарний накопичувач 11, необхідний для прийняття остаточного рішення про наявність або відсутність в аналізованому дискреті дальності сигналу, що перевищує граничні рівні, встановлені для пасивної перешкоди. Рішення приймається шляхом накопичення інформації протягом усього часу зондування даного дискрету. Таким чином, на виході додаткового бінарного накопичувача 11 формується ознака відображення, що містить інформацію про пасивні перешкоди і інші сигнали, амплітуда яких перевищує порогові рівні, що надходять на другі входи додаткових порогових схем 9 з виходу пристрою формування порогів. ДБН 11 може бути виконаний аналогічно БН 7 за (Клюєв Н.Ф. Виявлення імпульсних сигналів за допомогою накопичувачів дискретної дії. М.: Рад. радіо, 1963. - С. 45). З виходу додаткового бінарного накопичувача 11 ознака відображення надходить на вхід регістру 12. Регістр 12 використовується для затримки ознаки відображення на час опрацювання інформації в блоці виявлення. Сполучені в часі ознака цілі з виходу бінарного накопичувача 7 і ознака відображення з виходу регістра 12 надходять на входи пристрою суміщення інформації 13. Пристрій суміщення інформації 13 формує з двох бінарних сигналів відеосигнал цілі і відеосигнал перешкоджаючої обстановки, що відрізняються (наприклад, за яскравостю) при відображенні на екрані Індикатора 14. Таким чином, на екрані індикатора 14, поряд з оцінками від цілей, відображається інформація про просторове розташування пасивних перешкод. Оператор РЛС має можливість оперативно визначати межі зон, вільних від пасивних перешкод, і вводити отриману інформацію в пристрій керування 8. Пристрій керування 8 здійснює порівняння координат дискрету, який аналізується, з введеними в нього координатами областей вільних, від пасивних перешкод. У випадку, якщо дискет, у якому в даний момент робиться виявлення, належить до області, вільній від пасивних перешкод, на виході пристрою керування 8 формується ознака відключення блоку оцінки доплерівської частоти. Ознака відключення надходить на другі входи схем відключення 4. При цьому на їх виходах формується сигнал "лог.1”, незалежно від ознаки високої частоти з виходу блоку оцінки доплерівської частоти 2. Сигнали "лог.1" з виходів схем відключення надходять на другі входи схем "І" 5. Таким чином, на входи схеми "АБО" 6 надходять ознаки перевищення відгуків розфільтрованого сигналу над енергетичними порогами, встановленими в порогових схемах 3. 3 37631 Отже, в областях, вільних від пасивних перешкод, можливе виявлення цілі, незалежно від її радіальної швидкості, якщо амплітуда сигналів цілі достатня для перевищення енергетичного порога. Крім виводу на екран зон, вільних від пасивних перешкод, оператор РЛС за допомогою запропонованого пристрою може вивести на екран інформацію про метеорологічну обстановку. Як схему відключення 4 можна, наприклад, використовувати комутатор, на "0" вхід якого надходить сигнал з виходу бінарної інформації БОДЧ 2, на вхід "І" підключений сигнал "лог.1", а на вхід керування комутатора надходить ознака відключення блоку оцінки доплерівської частоти. Якщо ознака відключення дорівнює "лог.1", на вихід схеми відключення пропускається сигнал "лог.1", якщо ознака відключення дорівнює "лог. 0", то на вихід схеми відключення пропускається сигнал з виходу бінарної інформації БОДЧ 2. Пристрій керування 8 може бути виконаний у вигляді, показаному на фіг. 3. Пристрій містить лічильники СТ 1 і СТ 2, дешифратори ДС 1 і ДС 2 і схему "І". Лічильник СТ 1 рахує імпульси з періодом, рівним дискрету дальності, скид СТ 2 здійснюється імпульсом запуску. У дешифраторі ДС 1 формується строб за дальністю в кожному з періодів запуску. Тривалість стробу за дальністю визначається відповідно до коду керування за дальністю, що надходить по входу керування з робочого місця оператора. Лічильник СТ 2 рахує імпульси з періодом, рівним дискрету за азимутом, скид СТ 2 здійснюється імпульсом початку азимутальної розгортки індикатора кругового огляду. У ДС 2 формується строб за азимутом. Розмір стробу за азимутом визначається відповідно до коду керування за азимутом, що надходить по входу керування з робочого місця оператора. Сигнали з виходів ДС 1 і ДС 2 надходять на схему "І", на виході якої формується ознака відключення блоку оцінки доплерівської частоти. На фіг. 4 наведений приклад формування ділянки за дальністю й азимутом на індикаторі кругового огляду. На ділянці, вільній від пасивних перешкод (на фіг.4 заштрихована ділянка), ознака відключення з виходу пристрою керування дорівнює "лог.1" 1, відповідно, на цій ділянці відключається БОДЧ 2. Це дозволяє на ділянці, вільній від пасивних перешкод, знизити втрати при виявленні цілей. Пристрій суміщення інформації 13 може бути виконаний, наприклад, на операційному підсилювачі (див. фіг.3). Резистори R1 і R2 підібрані в такий спосіб (R2>R1), що яскравість індикатора по відмітках з виходу БН (від цілей) вище, ніж яскравість по відмітках з виходу ДБН (від пасивних перешкод). Необхідний рівень відеосигналу на виході пристрою суміщення інформації 13 встановлюється резистором R3. Як індикатор 14 може бути використаний будьякий із видів індикаторів РЛС кругового огляду: індикатор кругового огляду (ІКО) з радіальнокруговою розгорткою; ІКО з секторною розгорткою; індикатор азимуту і дальності з прямокутним растром (див.: Фінкельштейн М.И. Основи, радіолокації. - М.: Рад. радіо, 1973. - С.28-40). Пристрій формування порогів 8 може бути виконаний за допомогою постійного запам'ятовуючого пристрою (ПЗП), наприклад, на мікросхемах 537РФ6. Адресні входи ПЗП підключаються до входу управління відображенням пристрою автоматичного виявлення. В залежності від коду управління відображенням, який надходить на адресні входи ПЗП, на його вихід надходять порогові рівні, відповідні обраному режиму відображення. Для кожного режиму відображення в ПЗП записуються відповідні значення порогових рівнів. Для виявлення малорозмірних цілей в областях, вільних від пасивних перешкод, порогові рівні обираються однаковими з пороговими рівнями, встановленими в основних порогових схемах 3. Для контролю метеообстановки у зоні дії РЛС у ПЗП програмується набір порогових рівнів відповідно до інтенсивності різних типів метеоутворювань. Для нагляду за небезпечними погодними явищами (грозові фронти, міцні турбулентності) може бути використаний режим, при якому за допомогою високих порогових рівнів, які подаються на входи додаткових порогових схем 9, підключених до виходів доплерівських фільтрів 1, настроєних на низькі доплерівські частоти, забороняється проходження інформації з їх виходів на вхід додаткової схеми "АБО" 10. При цьому на індикаторі РЛС відображається інформація тільки від тих метеоутворень, які швидко переміщуються. Експерементальні дослідження запропонованого пристрою в складі РЛС виявлення показали, що в порівнянні з пристроєм аналогічного призначення (прототипом), пристрій, що пропонується, знижує втрати при виявленні цілей і дозволяє за рахунок цього поліпшити проводку малошвидкісних цілей у вільному просторі, а також дозволяє підвищити безпеку польотів за рахунок оперативного контролю метеорологічної обстановки у зоні дії РЛС. 4 Фіг. 1 37631 5 Фіг. 2 37631 6 37631 Фіг. 3 7 37631 Фіг. 4 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2001 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 8
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for automatically detecting targets
Автори англійськоюKononovych Viktor Yakovych, Lavrentiev Volodymyr Mykolaiovych, Kaspyrovych Oleksandr Hennadiiovych
Назва патенту російськоюУстройство для автоматического обнаружения целей
Автори російськоюКононович Виктор Яковлевич, Лаврентьев Владимир Николаевич, Каспирович Александр Геннадиевич
МПК / Мітки
МПК: G01S 13/52, G01S 13/00
Мітки: пристрій, автоматичного, виявлення
Код посилання
<a href="https://ua.patents.su/8-37631-pristrijj-avtomatichnogo-viyavlennya.html" target="_blank" rel="follow" title="База патентів України">Пристрій автоматичного виявлення</a>
Пристрій автоматичного виявлення сигналів
Номер патенту: 37870
Опубліковано: 15.05.2003
Автори: Падалко Віктор Григорович, Каспирович Олександр Геннадійович, КОПНОВ МИХАЙЛО ОЛЕКСАНДРОВИЧ, Мирошниченко Михайло Іванович, Мокеєв Юрій Геннадійович, Козловський Петро Леонідович, Немчин Олександр Федорович, КОНОНОВИЧ ВІКТОР ЯКОВИЧ, Лаврентьєв Володимир Миколайович
МПК: G01S 7/36
Мітки: сигналів, пристрій, виявлення, автоматичного
Формула / Реферат:
Пристрій автоматичного виявлення сигналів, що містить q доплерівських фільтруючих каналів з об'єднаними входами, що є входом пристрою, q-входову схему АБО, входи якої з'єднані з виходами доплерівських фільтруючих каналів, бінарний накопичувач, вхід якого з'єднаний з виходом q-входової схеми АБО, а вихід є виходом пристрою, кожен з каналів включає доплерівський фільтр, вхід якого є входом доплерівського фільтруючого каналу, багатовідвідну...
Пристрій автоматичного виявлення сигналів інформації
Номер патенту: 37870
Опубліковано: 15.05.2001
Автори: КОПНОВ МИХАЙЛО ОЛЕКСАНДРОВИЧ, КОНОНОВИЧ ВІКТОР ЯКОВИЧ, Лаврентьєв Володимир Миколайович, Мирошниченко Михайло Іванович, Падалко Віктор Григорович, Немчин Олександр Федорович, Мокеєв Юрій Геннадійович, Козловський Петро Леонідович, Каспирович Олександр Геннадійович
МПК: G01S 7/36
Мітки: пристрій, автоматичного, виявлення, інформації, сигналів
Формула / Реферат:
Пристрій автоматичного виявлення сигналів, що містить q доплерівських фільтруючих каналів з об'єднаними входами, що є входом пристрою, q-входову схему АБО, входи якої з'єднані з виходами доплерівських фільтруючих каналів, бінарний накопичувач, вхід якого з'єднаний з виходом q-входової схеми АБО, а вихід є виходом пристрою, кожен з каналів включає доплерівський фільтр, вхід якого є входом доплерівського фільтруючого каналу, багатовідвідну...
Пристрій виявлення сигналів
Номер патенту: 37871
Опубліковано: 15.05.2003
Автори: Мирошниченко Михайло Іванович, Траілін Вячеслав Федорович, Каспирович Олександр Геннадійович, Немчин Олександр Федорович, Падалко Віктор Григорович, Лаврентьєв Володимир Миколайович, КОНОНОВИЧ ВІКТОР ЯКОВИЧ, КОПНОВ МИХАЙЛО ОЛЕКСАНДРОВИЧ, Мокеєв Юрій Геннадійович
МПК: G01S 7/02
Мітки: пристрій, сигналів, виявлення
Формула / Реферат:
Пристрій виявлення сигналів , який містить розв'язувальний блок, який відрізняється тим, що додатково містить блок оцінки рівня шуму, допоміжний блок затримки, об'єднані входи яких є входом пристрою, подільник, вхід якого підключений до виходу допоміжного блока затримки, послідовно з'єднані (k-1) блоки затримки, виходи кожного з яких та вхід першого підключені відповідно до перших входів k компараторів, вхід першого блока затримки з'єднаний...
Пристрій виявлення сигналів інформації
Номер патенту: 37871
Опубліковано: 15.05.2001
Автори: Мокеєв Юрій Геннадійович, Траілін Вячеслав Федорович, Мирошниченко Михайло Іванович, Немчин Олександр Федорович, Падалко Віктор Григорович, КОНОНОВИЧ ВІКТОР ЯКОВИЧ, Каспирович Олександр Геннадійович, КОПНОВ МИХАЙЛО ОЛЕКСАНДРОВИЧ, Лаврентьєв Володимир Миколайович
МПК: G01S 7/02
Мітки: виявлення, інформації, пристрій, сигналів
Формула / Реферат:
Пристрій виявлення сигналів , який містить розв'язувальний блок, який відрізняється тим, що додатково містить блок оцінки рівня шуму, допоміжний блок затримки, об'єднані входи яких є входом пристрою, подільник, вхід якого підключений до виходу допоміжного блока затримки, послідовно з'єднані (k-1) блоки затримки, виходи кожного з яких та вхід першого підключені відповідно до перших входів k компараторів, вхід першого блока затримки з'єднаний...
Спосіб дистанційного виявлення місця витоку газів та автоматичного відбору проби і пристрій для його здійснення
Номер патенту: 31895
Опубліковано: 15.06.2001
Автори: Курило Микола Іванович, Фунтов Ігор Леонідович
МПК: G01M 3/16, F17D 5/00, G01N 1/22, G01M 3/04, G01N 1/24
Мітки: проби, відбору, автоматичного, виявлення, газів, здійснення, пристрій, місця, спосіб, дистанційного, витоку
Формула / Реферат:
1. Спосіб дистанційного виявлення місця витоку газів та автоматичного відбору проби, який включає пересування газочутливого засобу постійної дії поблизу об'єкта, що досліджується, який відрізняється тим, що доставку газочутливого засобу здійснюють керованим повітряно-транспортним шляхом, місце витоку локалізують за зміною індикації, яка викликана зміною концентрації оточуючого газу, відбір проби здійснюють автоматично при досягненні...
Попередній патент: Спосіб одержання глюфозинату, проміжні продукти та спосіб одержання проміжних продуктів
Випадковий патент: Пальниковий пристрій для спалювання відходів рослинного походження