Спосіб визначення порога чутливості гіроскопічного датчика кутової швидкості
Номер патенту: 16265
Опубліковано: 29.08.1997
Автори: Павловський Михайло Антонович, Кузьменко Юрій Михайлович, Рудик Юрій Микитович, Маросін Олег Петрович, Карпачов Юрій Андрійович, Анупрієнко Генадій Єфремович, Єрмаков Сергій Миколайович
Формула / Реферат
Способ определения порога чувствительности гироскопического датчика угловой скорости (ГДУС), включающий задание монотонно возрастающего входного сигнала путем приложения управляющего момента по выходной оси ГДУС и определение порога чувствительности по изменению выходного сигнала ГДУС, отличающийся тем, что, с целью повышения точности определения порога чувствительности ГДУС, формируют монотонно возрастающий входной сигнал путем приложения управляющего момента по выходной оси ГДУС в диапазоне от -Му макс ДО ^Му мако причем величину момента Му макс выбирают большей суммы момента трения и возмущающего момента по выходной оси ГДУС. измеряют временной сдвиг между моментами равенства нулю входного и выходного сигналов, затем формируют монотонно убывающий входной сигнал в диапазоне от +Му макс ДО -Му макс. измеряют временной сдвиг 1) между моментами равенства нулю входного и выходного сигналов на этом участке, определяют значение управляющего момента на участках возрастанияМу^(± 1]^)иубыванияМу'(± ^^соответственно в функции временного сдвига между моментами равенства нулю входного и выходного сигналов, причем знак ''+'' при 1]^ и (['соответствует случаю, когда момент равенства нулю входного сигнала возникает раньше момента равенства нулю выходного сигнала, а ''-'' - наоборот, порог чувствительности определяют по формуле
М^ ( ± ^) - М-( ± «Г) "" = —2Н~^—-
где Н - кинетический момент гироскопа.
Текст
Изобретение относится к гироскопической технике и может быть использовано при испытаниях датчиков угловой скорости (ГДУС). Изобретение позволяет повысить точность определения порога чувствительности ГДУС. По выходной оси ГДУС прикладывают монотонно изменяющийся управляющий момент и определяют временные интервалы между моментами равенства нулю входного и выходного сигналов сначала на участке возрастания входного сигнала, а затем на участке убывания входного сигнала. По результатам измерений временных интервалов определяют порог чувствительности ГДУС. М sign М ц +М_> С (1) где - монотонно изменяющийся управляющий момент (входной сигнал); - момент обратной связи ГДУС; Мс - момент сопротивления; - полярность скорости измеsign нения входного сигнала; М й — возмущакщийся момент (например , от угловой скорости вращения Земли, дебаланса и т.д.). * Рассмотрим случай возрастания входного сигнала Mu(t). Если My(t)>0, то signM^ = +1 и момент сопротивления будет направлен против управляющего момента. Из выражения (1) спедует, что если в момент времени, когда входной сигнал Mu-(t) проходит через о СО 3 15140J1 Если крутизна изменения входного ноль принять время t = 0 и измерить время t,, коїда черсч ноль будет просигнала на уилегках возрастания и убы вания будут различными (соответственходить выходной сигнал M o c ( t ) , то но С 4 и (\), го С0п вычисляется по при времени t входной сигнал будет формуле равен C 2 t" C,t . + (2) = Мс (7) м Верхний индекс "+' означает, что испитание проводится по закону возрастания входного сигнала. При этом может оказаться, что сначала через ноль проходит выходной сигнал (при К > М С ) . Тогда время t , в формуле (2) необходимо брать , отрицательным. Аналогично при случае убывания входного сигнала (signM,, ~ -1) (3) ZH При изменении входного сигнала по синосоидальному закону * ir 2H Для тоге?, чтобы выходной сигнал проходил через ноль в диапазоне изменения входного сигнала необходимо максимальное отклонение входного сигнала выбирать из соотношения MJ где С ~ частота изменения входного О сигнала, з соответствии с формулой (4) формула для определения порога чувствительности имеет вид 20 Здесь также, как и в случае возрастания входного сигнала, время t, может быть больше 0, равно 0 и меньше 0. •ус Вычитая из формулы (2) выражение (3) и учитывая, что порог чувствительности ГДУС равен С0„= М о / Н , где Н - кинетический момент гироскопа, получим wn М (t) - М ( '^ макс Qn = ™jj _ Мм ^ маке __ , . . SintO 4H x Г + -ч (smut ( + smut,) = м\ + t 7 l ' • = COS CO* I * ' ( 8 ) Б выражениях (6), (7) и (8) t, и t, берутся положительными (отрицательными) , если раньше проходит через ноль входной (выходной) сигнал. В ряде случаев можно считать, что М •? М„. Тогда измерение с0п достаточ? но проводить только при возрастании 35 (или убывании) входного сигнала, а формула (4) сводится к виду (5) Таким образом, для осуществпения 40 способа необходимо задать по выходной оси ГДУС сначала монотонно возрастающий сигнал, измерить временной интервал между моментами равенства нулю входного и выходного сигналов, 45 затем задать монотонно убывающий сигнал, измерить временной интервал между моментами равенства нулю входного и выходного сигналов и по формуле (4) вычислить значение порога чувствительности ГДУС. Пусть, например, входной сигнал изменяется по линейному закону с крутизной с M y ( t ) = ct. 55 В соответствии с (4) получим (6) tip и линейном законе изменения а при синусоидальном законе изменения Mii(t) мокс Ф о р м у л а и з о б р е т е н и я Способ определения порога чувствительности гироскопического датчика угловой скорости (ГДУС), включающий задание монотонно возрастающего входного сигнала путем приложения управляющего момента по выходной і 6 5 15 40 Л ми равенства нулю входного и выходоси ГДУС и определение порога чувстного сигналов на этом участке, опревительности по изменению выходного деляют значение управляющего момента сигнала ГДУС, о т л и ч а ю щ и й на участках возрастания М„ (+t.) и с я тем, что, с целью повышения D убывания М ^ ( * t ) соответственно в ;-f точности определения порога чувстфункции временного, сдвига между мовительности ГДУС, формируют монотонментами равенства нулю входного и но возрастающий входной сигнал пувыходного сигналов, причем знак "+" тем приложения управляющего момента при t| и t соответствует случаю, по выходной оси ГДУС в диапазоне от 10 ~^іі„п^Д° +ИІІ..,., причем величину когда момент равенства нулю входного момента Ма Макс выбирают большей сигнала возникает раньше момента расуммы момента трения и возмущающего венства нулю выходного сигнала, а "-" - наоборот, порог чувствительномомента по выходной оси ГДУС, измести определяют по формуле ряют временной сдвиг между момента ми равенства нулю входного и выходного сигналов, затем формируют монотонно убывающий входной сигнал в диа-п 2Н пазоне от +Мц до -My uakrt измеря20 ют временной сдвиг t j между момента= j где Н - кинетический момент гироскопа, Составитель Н.Станкевич Редактор Л.Волкова Техред А.Кравчук Корректор С,Черни Заказ 1901/ДСП Тираж 354 Подписное БНШІПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-издательский комбинат "Патент", г.Ужгород, Г-їгаринг,101
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determination of sensitivity threshold of gyroscopic indicator of angular velocity
Автори англійськоюAnuprienko Hennadii Yefremovych, Yermakov Serhii Mykolaiovych, Karpachov Yurii Andriiovych, Kuzmenko Yurii Mykhailovych, Marosin Oleh Petrovych, Pavlovskyi Mykhailo Antonovych, Rudyk Yurii Mykytovych
Назва патенту російськоюСпособ определения порога чувствительности гироскопического датчика угловой скорости
Автори російськоюАнуприенко Геннадий Ефремович, Ермаков Сергей Николаевич, Карпачев Юрий Андреевич, Кузьменко Юрий Михайлович, Маросин Олег Петрович, Павловский Михаил Антонович, Рудик Юрий Никитович
МПК / Мітки
МПК: G01C 19/00
Мітки: визначення, спосіб, швидкості, гіроскопічного, чутливості, датчика, порога, кутової
Код посилання
<a href="https://ua.patents.su/4-16265-sposib-viznachennya-poroga-chutlivosti-giroskopichnogo-datchika-kutovo-shvidkosti.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення порога чутливості гіроскопічного датчика кутової швидкості</a>
Пристрій для визначення відносної кутової швидкості при коливальному процесі управління орієнтацією космічного апарата
Номер патенту: 10788
Опубліковано: 25.12.1996
Автори: Карпачов Юрій Андрійович, Анупрієнко Генадій Єфремович, Павловський Михайло Антонович
МПК: B64G 1/24
Мітки: апарата, пристрій, визначення, кутової, процесі, космічного, швидкості, управління, відносної, орієнтацією, коливальному
Формула / Реферат:
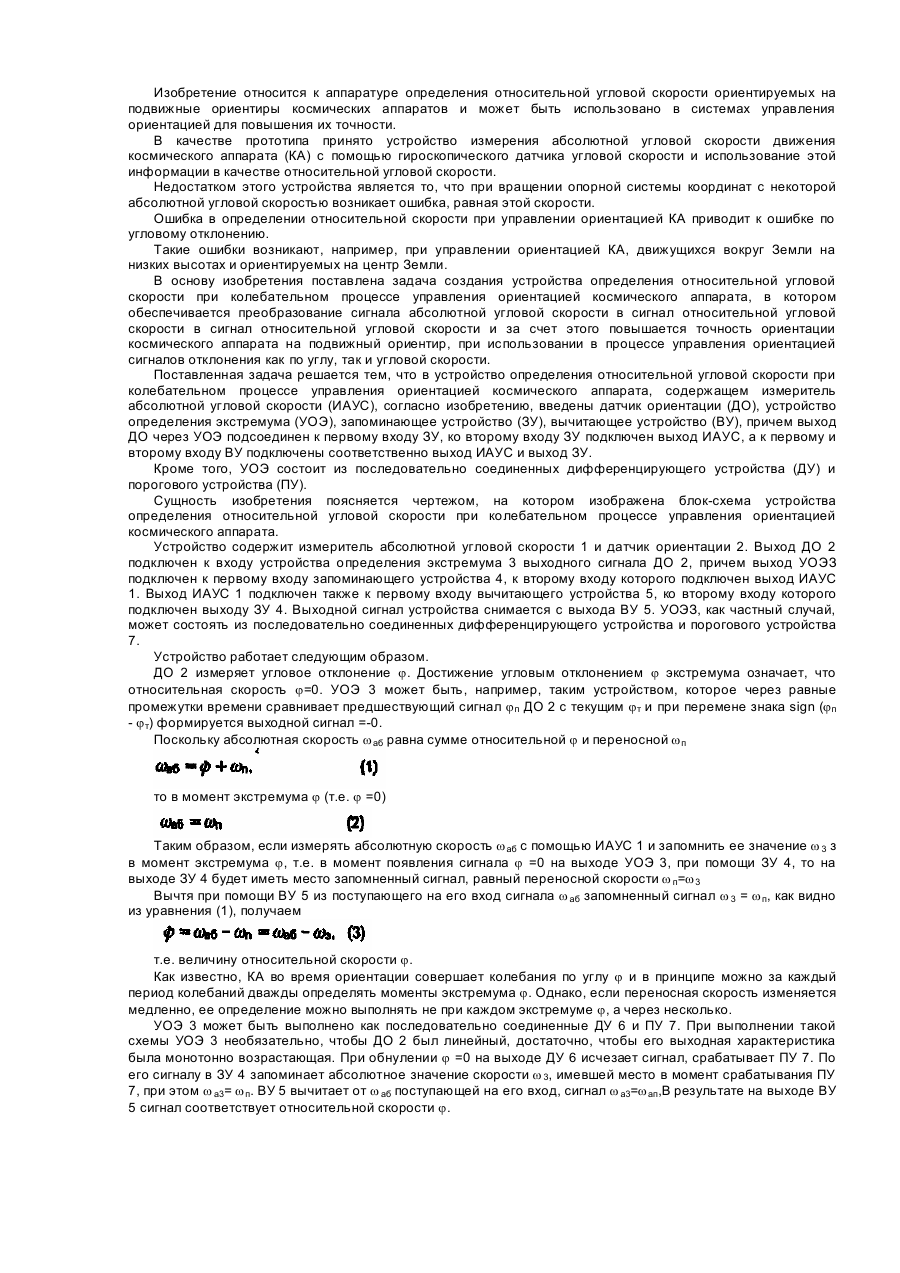
1. Устройство определения относительной угловой скорости при колебательном процессе управления ориентацией космического аппарата, содержащее измеритель абсолютной угловой скорости, отличающееся тем, что введены датчик ориентации, устройство определения экстремума, запоминающее устройство и вычитающее устройство, причем выход датчика ориентации через устройство определения экстремума подсоединен к первому входу запоминающего устройства,...
Спосіб визначення відносної кутової швидкості під час коливального процесу керування орієнтаціею об’єкту на рухомий орієнтир
Номер патенту: 3990
Опубліковано: 27.12.1994
Автор: Анупрієнко Генадій Єфремович
МПК: B64G 1/24
Мітки: орієнтир, відносної, визначення, швидкості, керування, об'єкту, рухомий, орієнтаціею, спосіб, коливального, процесу, кутової
Формула / Реферат:
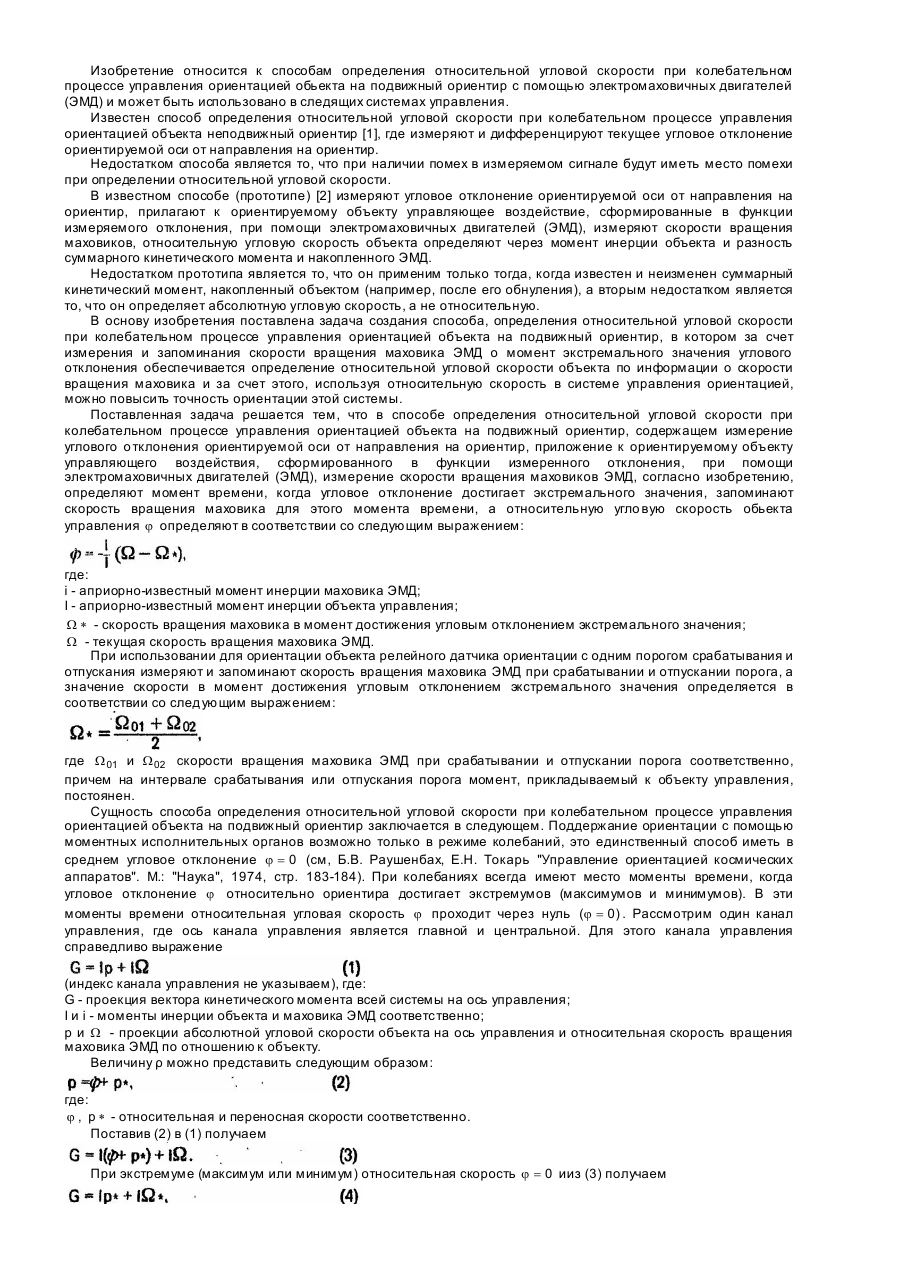
1. Способ определения относительной угловой скорости при колебательном процессе управления ориентацией объекта на подвижным ориентир, включающий измерение углового отклонения ориентируемой оси от направления на ориентир, приложение к ориентируемому объекту управляющего воздействия, сформированного в функции измеренного отклонения, при помощи электромаховичных двигателей (ЭМД), измерение скорости вращения маховиков ЭМД, отличающийся тем, что...
Спосіб визначення больової чутливості зубів
Номер патенту: 105
Опубліковано: 30.04.1993
Автор: Гришанін Геннадій Григорович
МПК: A61B 5/01
Мітки: зубів, спосіб, визначення, чутливості, больової
Формула / Реферат:
(57) Способ определения болевой чувствительности зубов после рефлекторной аналгезии путем нанесения электрического раздражения, отличающийся тем, что, с целью снятия болевых воздействий при электрическом раздражении, измеряют температуру кожи лица в местах проекции инфраорбитального и ментального отверстий до рефлекторной анальгезии и после нее через каждые 10 мин и при повышении температуры на 1,5-2,5°С определяют повышение порога болевой...
Спосіб вимірювання швидкості переміщення
Номер патенту: 1822
Опубліковано: 20.12.1994
Автор: Ярославцев Михайло Іванович
МПК: G01P 3/00
Мітки: спосіб, переміщення, вимірювання, швидкості
Формула / Реферат:
Способ измерения скорости перемещения, основанный на формировании временных интервалов, кратных или равных периодам питающего и выходного сигналов синусно-косинусного датчика, и на определении разности между этими интервалами, отличающийся тем, что, с целью повышения точности измерения, вырабатывают в каждом временном интервале, равном или кратном периоду выходного сигнала датчика, импульс с площадью, пропорциональной модулю разности...
Датчик кутової швидкості

Номер патенту: 17753
Опубліковано: 20.05.1997
Автори: Кухарчук Василь Васильович, Гоменюк Анатолій Сергійович, Поджаренко Андрій Володимирович, Поджаренко Володимир Олександрович, Кулаков Павло Ігоревич
МПК: G01P 3/42
Мітки: швидкості, кутової, датчик
Формула / Реферат:
Датчик угловой скорости, содержащий источник света, модулятор светового потока в виде диска, в котором выполнены прозрачные и непрозрачные элементы равной угловой ширины, линейный фотоприемник, диафрагму, установленную перед фотоприемником, отличающийся тем, что в него введен второй фотоприемник, сдвинутый относительно первого по отношению к центру модулятора на угол, который в полтора раза больше угловой ширины прозрачных и непрозрачных...
Попередній патент: Опорний вузол випробувального стола
Наступний патент: Тампонажний розчин
Випадковий патент: Технологічна лінія для видалення і знешкодження мулових осадків стічних вод