Механічний безмуфтовий прес
Номер патенту: 25093
Опубліковано: 25.07.2007
Автори: Запорожченко Віталій Сергійович, Зимин Максим Олександрович


Формула / Реферат
Механічний безмуфтовий прес, що містить станину, кривошипний вал, змонтований в підшипникових опорах станини і зв'язаний з електродвигуном за допомогою маховика та гнучкого зв'язку, ексцентрикову втулку, що має ексцентриситет, що дорівнює радіусу кривошипа, яка встановлена на останньому і обхоплюється великою головкою шатуна, а в її тілі в радіальному напрямку виконано отвір, в якому розміщено рухомі елементи, а напроти в зовнішній циліндричній поверхні кривошипа виконано лунку, повзун, встановлений у вертикальних напрямних станини і з'єднаний з шатуном та зрівноважувачем, а також засіб вмикання преса у вигляді рухомого упора, з'єднаного з силовим циліндром, в поршневій порожнині якого розташовано потужну пружину стиснення, та нерухомого упора з пружним елементом - амортизатором в тілі шатуна, який відрізняється тим, що рухомі елементи виконано у вигляді фіксатора, форма західної частини якого відповідає формі лунки на кривошипі, з притиснутими до нього пружиною стиснення, жорсткість якої менша за жорсткість пружини силового циліндра, та ковзним упором, що знаходяться в постійному контакті між собою в радіальному напрямку.
Текст
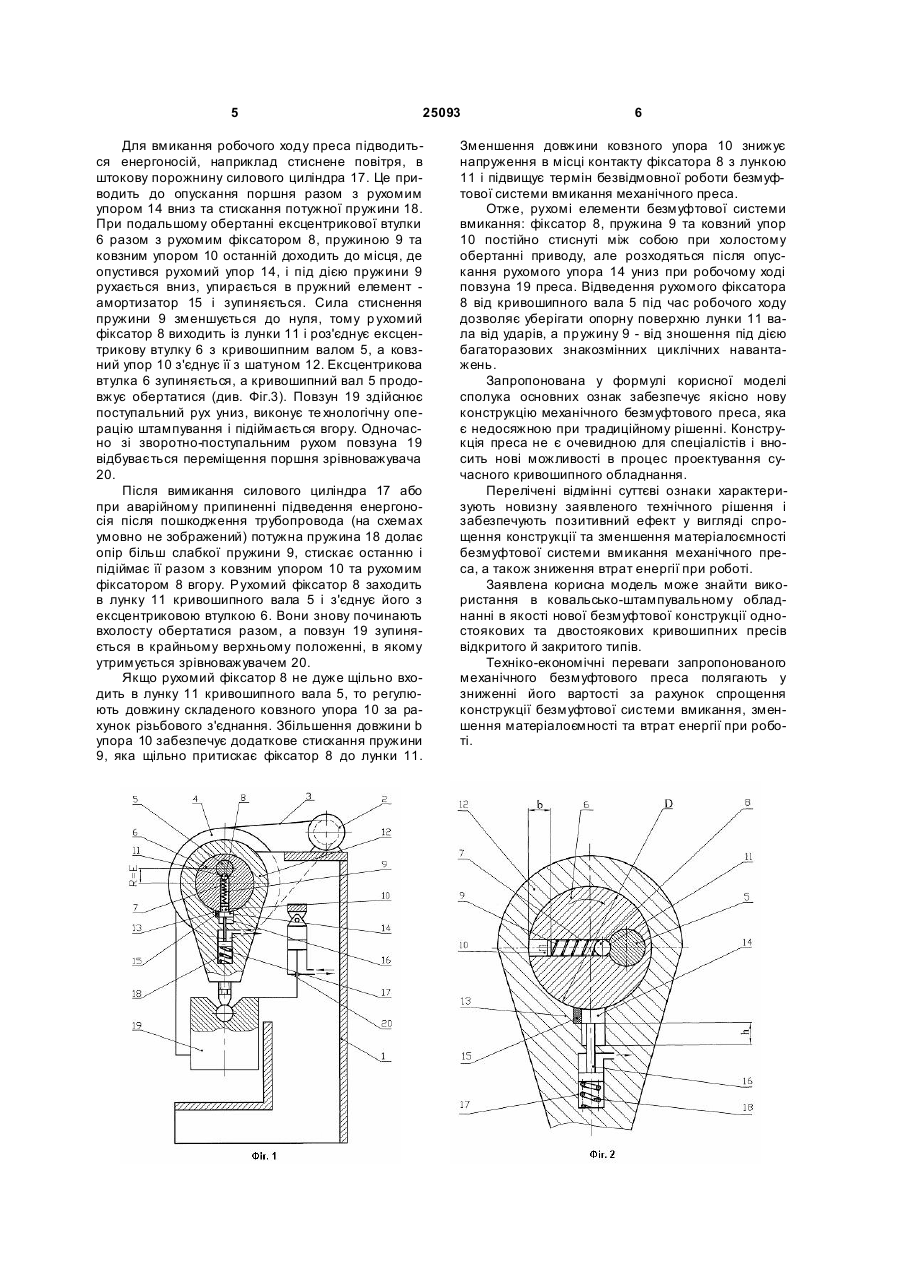
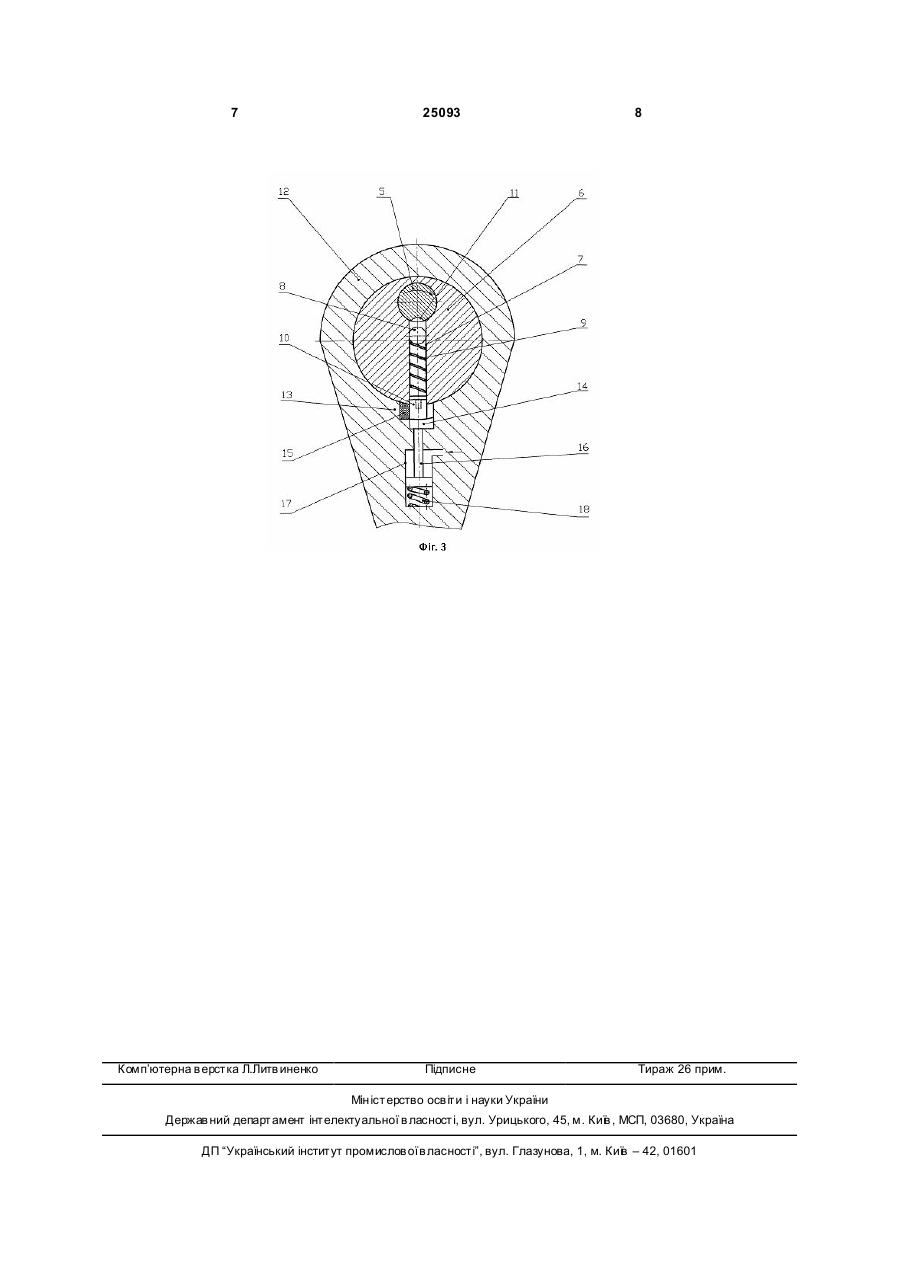
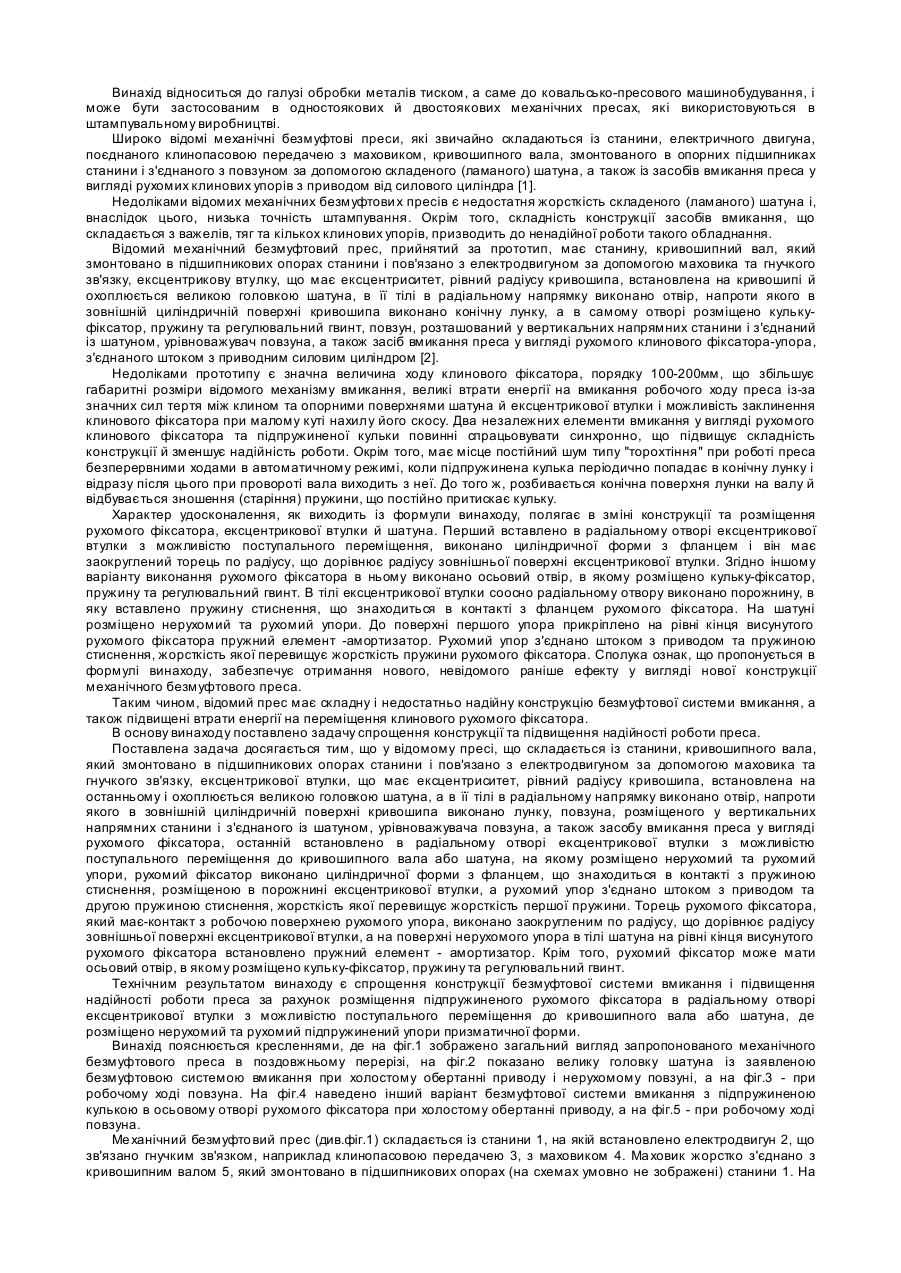
Механічний безмуфтовий прес, що містить станину, кривошипний вал, змонтований в підшипникових опорах станини і зв'язаний з електродвигуном за допомогою маховика та гнучкого зв'язку, ексцентрикову втулку, що має ексцентриситет, що дорівнює радіусу кривошипа, яка встановлена на останньому і обхоплюється великою головкою шатуна, а в її тілі в радіальному напрямку виконано отвір, в якому розміщено рухомі елементи, а 3 25093 ра при його переміщенні вздовж стінок радіального отвору й порожнини в ексцентриковій втулці. Таким чином, відомий прес має складну і матеріалоємну систему безмуфтового вмикання, а також характеризується підвищеними втратами енергії при роботі механічного преса. В основу корисної моделі поставлено задачу спрощення конструкції і зменшення втрат енергії та матеріалоємності системи безмуфтового вмикання. Поставлена задача досягається тим, що у відомому пресі, який складається зі станини, кривошипного вала, змонтованого в підшипникових опорах станини і зв'язаного з електродвигуном за допомогою маховика та гнучкого зв'язку, ексцентрикової втулки, що має ексцентриситет, рівний радіусу кривошипа, яка встановлена на останньому і обхоплюється великою головкою шатуна, а в її тілі в радіальному напрямку виконано отвір, в якому розміщено рухомі елементи, а напроти в зовнішній циліндричній поверхні кривошипа виконано лунку, повзуна, розташованого у вертикальних напрямних станини і з'єднаного з шатуном та зрівноважувачем, а також засобу вмикання преса у вигляді рухомого упора, з'єднаного з силовим циліндром, в поршневій порожнині якого розташовано потужну пружину стиснення, та нерухомого упора з пружним елементом - амортизатором в тілі шатуна, згідно до корисної моделі, рухомі елементи виконано у вигляді фіксатора, форма західної частини якого відповідає формі лунки на кривошипі, з притиснутими до нього пружиною стиснення, жорсткість якої менша за жорсткість пружини силового циліндра, та ковзним упором, які знаходяться в постійному контакті між собою в радіальному напрямку. Сполука ознак, що пропонується у формулі корисної моделі, забезпечує отримання нового, невідомого раніше ефекту у вигляді нової конструкції безмуфтового преса за рахунок її спрощення та зменшення матеріалоємності його безмуфтової системи вмикання і зниження втрат енергії при роботі. Корисна модель пояснюється кресленнями, де на Фіг.1 зображено загальний вигляд запропонованого механічного безмуфтового преса в поздовжньому перерізі, на Фіг.2 показано велику головку шатуна із заявленою безмуфтовою системою вмикання при холостому обертанні приводу та нерухомому повзуні, а на Фіг.3 - при робочому ході повзуна. Ме ханічний безмуфтовий прес (див. Фіг.1) складається зі станини 1, на якій встановлено електродвигун 2, зв'язаний гнучким зв'язком, наприклад клинопасовою передачею 3, з маховиком 4. Ма ховик жорстко з'єднано з кривошипним валом 5, який змонтовано в підшипникових опорах (на схемах умовно не зображені) станини 1. На шатунній шийці кривошипного вала 5 розміщено ексцентрикову втулку 6, ексцентриситет Е якої дорівнює радіусу R кривошипа. В тілі ексцентрикової втулки 6 виконано радіальний отвір 7, в якому встановлено рухомий фіксатор 8, пружний елемент, наприклад пружину 9 стиснення, і ковзний упор 10, які щільно 4 стиснуті між собою. Рухомий фіксатор 8 може бути виконано у вигляді кульки, конуса, піраміди, циліндра невеликої висоти з верхньою частиною сферичної або іншої форми. На циліндричній поверхні шатунної шийки кривошипного вала 5 напроти рухомого фіксатора 8 виконано лунку 11 сферичної, конічної або іншої форми, що відповідає формі західної частини фіксатора 8. На шатуні 12 розміщено нерухомий та рухомий упори 13 і 14, відповідно. З метою пом'якшення ударів висунутого ковзного упора 10 по нерухомому упору 13, на останньому встановлено пружний елемент - амортизатор 15, наприклад, у вигляді пружини, шару гуми, поліуретану, спеціальної пластмаси тощо. Рухомий упор 14, встановлений з можливістю вертикального переміщення, має призматичну або циліндричну форму з увігнутою опорною верхньою поверхнею, радіус якої дорівнює радіусу зовнішньої поверхні D/2 ексцентрикової втулки 6. Ковзний упор 10 може мати складену конструкцію, наприклад, складатися з двох частин, з'єднаних між собою різьбою. Це дозволяє змінювати висоту b ковзного упора 10 і регулювати силу стискання пружини 9 стиснення та силу притискання фіксатора 8 до лунки 11. При цьому висота b ковзного упора 10 повинна перевищувати величину переміщення h рухомого упора 14, а його нижній торець, обернений до великої головки шатуна 12, виконується заокругленим по радіусу, що дорівнює радіусу зовнішньої поверхні D/2 ексцентрикової втулки 6 (див. Фіг.2). Рухомий упор 14 з'єднано штоком 16 з приводом, який може бути виконано у вигляді силового циліндра 17 пневматичного або гідравлічного типу. В поршневій порожнині силового циліндра 17 встановлено потужну пружину 18 стиснення. Жорсткість пружини 9, розміщеної в радіальному отворі 7 ексцентрикової втулки 6, менша за жорсткість пружини 18 силового циліндра 17. Повзун 19 розташовано у вертикальних напрямних станини 1 і з'єднано з кривошипним валом 5 через шатун 12, а також із зрівноважувачем 20 повзуна, наприклад пневматичного типу. Заявлений прес працює наступним чином. Встановлений на станині 1 електричний двигун 2 після його вмикання через гнучкий зв'язок 3 приводить до обертання маховик 4 та жорстко з'єднаний з ним кривошипний вал 5. При відсутності подачі енергоносія (стисненого повітря, робочої рідини під тиском тощо) в штокову порожнину силового циліндра 17 його поршень, шток 16 і рухомий упор 14 під дією потужної пружини 18 стиснення знаходяться у верхньому положенні. Ексцентрикова втулка 6 з'єднана з кривошипним валом 5 за допомогою рухомого фіксатора 8, західна частина якого знаходиться в лунці 11 кривошипного вала 5. Вони обертаються разом як суцільне циліндричне тіло (див. Фіг.2). При цьому ексцентрикова втулка 6 компенсує кутовий поворот кривошипного вала 5 своїм провертанням в той же бік на однаковий кут, так як її ексцентриситет Е дорівнює радіусу кривошипа R, а повзун 19 залишається нерухомим і утримується пневматичним зрівноважувачем 20 у крайньому вер хньому положенні. 5 25093 Для вмикання робочого ходу преса підводиться енергоносій, наприклад стиснене повітря, в штокову порожнину силового циліндра 17. Це приводить до опускання поршня разом з рухомим упором 14 вниз та стискання потужної пружини 18. При подальшому обертанні ексцентрикової втулки 6 разом з рухомим фіксатором 8, пружиною 9 та ковзним упором 10 останній доходить до місця, де опустився рухомий упор 14, і під дією пружини 9 рухається вниз, упирається в пружний елемент амортизатор 15 і зупиняється. Сила стиснення пружини 9 зменшується до нуля, тому р ухомий фіксатор 8 виходить із лунки 11 і роз'єднує ексцентрикову втулку 6 з кривошипним валом 5, а ковзний упор 10 з'єднує її з шатуном 12. Ексцентрикова втулка 6 зупиняється, а кривошипний вал 5 продовжує обертатися (див. Фіг.3). Повзун 19 здійснює поступальний рух униз, виконує те хнологічну операцію штампування і підіймається вгору. Одночасно зі зворотно-поступальним рухом повзуна 19 відбувається переміщення поршня зрівноважувача 20. Після вимикання силового циліндра 17 або при аварійному припиненні підведення енергоносія після пошкодження трубопровода (на схемах умовно не зображений) потужна пружина 18 долає опір більш слабкої пружини 9, стискає останню і підіймає її разом з ковзним упором 10 та рухомим фіксатором 8 вгору. Рухомий фіксатор 8 заходить в лунку 11 кривошипного вала 5 і з'єднує його з ексцентриковою втулкою 6. Вони знову починають вхолосту обертатися разом, а повзун 19 зупиняється в крайньому верхньому положенні, в якому утримується зрівноважувачем 20. Якщо рухомий фіксатор 8 не дуже щільно входить в лунку 11 кривошипного вала 5, то регулюють довжину складеного ковзного упора 10 за рахунок різьбового з'єднання. Збільшення довжини b упора 10 забезпечує додаткове стискання пружини 9, яка щільно притискає фіксатор 8 до лунки 11. 6 Зменшення довжини ковзного упора 10 знижує напруження в місці контакту фіксатора 8 з лункою 11 і підвищує термін безвідмовної роботи безмуфтової системи вмикання механічного преса. Отже, рухомі елементи безмуфтової системи вмикання: фіксатор 8, пружина 9 та ковзний упор 10 постійно стиснуті між собою при холостому обертанні приводу, але розходяться після опускання рухомого упора 14 униз при робочому ході повзуна 19 преса. Відведення рухомого фіксатора 8 від кривошипного вала 5 під час робочого ходу дозволяє уберігати опорну поверхню лунки 11 вала від ударів, а пружину 9 - від зношення під дією багаторазових знакозмінних циклічних навантажень. Запропонована у формулі корисної моделі сполука основних ознак забезпечує якісно нову конструкцію механічного безмуфтового преса, яка є недосяжною при традиційному рішенні. Конструкція преса не є очевидною для спеціалістів і вносить нові можливості в процес проектування сучасного кривошипного обладнання. Перелічені відмінні суттєві ознаки характеризують новизну заявленого технічного рішення і забезпечують позитивний ефект у вигляді спрощення конструкції та зменшення матеріалоємності безмуфтової системи вмикання механічного преса, а також зниження втрат енергії при роботі. Заявлена корисна модель може знайти використання в ковальсько-штампувальному обладнанні в якості нової безмуфтової конструкції одностоякових та двостоякових кривошипних пресів відкритого й закритого типів. Техніко-економічні переваги запропонованого механічного безмуфтового преса полягають у зниженні його вартості за рахунок спрощення конструкції безмуфтової системи вмикання, зменшення матеріалоємності та втрат енергії при роботі. 7 Комп’ютерна в ерстка Л.Литв иненко 25093 8 Підписне Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMechanical clutchless press
Автори англійськоюZaporozhchenko Vitalii Serhiiovych, Zymyn Maksym Oleksandrovych
Назва патенту російськоюМеханический безмуфтовый пресс
Автори російськоюЗапорожченко Виталий Сергеевич, Зимин Максим Александрович
МПК / Мітки
МПК: B30B 15/00
Мітки: безмуфтовий, прес, механічний
Код посилання
<a href="https://ua.patents.su/4-25093-mekhanichnijj-bezmuftovijj-pres.html" target="_blank" rel="follow" title="База патентів України">Механічний безмуфтовий прес</a>
Механічний безмуфтовий прес
Номер патенту: 68834
Опубліковано: 16.08.2004
Автор: Запорожченко Віталій Сергійович
МПК: B30B 15/00
Мітки: прес, механічний, безмуфтовий
Формула / Реферат:
1. Механічний безмуфтовий прес, що складається із станини, кривошипного вала, який змонтовано в підшипникових опорах станини і зв'язано з електродвигуном за допомогою маховика та гнучкого зв'язку, ексцентрикової втулки, що має ексцентриситет, рівний радіусу кривошипа, встановлена на останньому і охоплюється великою головкою шатуна, а в її тілі в радіальному напрямку виконано отвір, напроти якого в зовнішній циліндричній поверхні кривошипа...
Механічний безмуфтовий прес
Номер патенту: 7287
Опубліковано: 15.06.2005
Автор: Запорожченко Віталій Сергійович
МПК: B30B 15/00
Мітки: безмуфтовий, прес, механічний
Формула / Реферат:
Механічний безмуфтовий прес, що містить станину, кривошипний вал, який змонтовано в підшипникових опорах станини і зв'язано з електродвигуном за допомогою маховика та гнучкого зв'язку, ексцентрикову втулку, що має ексцентриситет, рівний радіусу кривошипа, яка встановлена на останньому і охоплюється великою головкою шатуна, і в тілі ексцентрикової втулки в радіальному напрямку виконано отвір, в якому розміщено регулювальний гвинт, пружину та...
Механічний безмуфтовий прес
Номер патенту: 34111
Опубліковано: 15.02.2001
Автори: Запорожченко Віталій Сергійович, Дейнекін Сергій Олексійович, Осауленко Оксана Олександрівна
МПК: B30B 15/00
Мітки: безмуфтовий, прес, механічний
Текст:
...8 виконано поглиблення 17, наприклад конічної форми. Повзун 18 розміщено у вертикальних напрямних станини 1 і з'єднано з тілом шатуна 11 через регулювальний гвинт 10, а також з урівноважувачем 20, наприклад пневматичного типу. Запропонований прес працює таким чином. Встановлений на станині 1 електродвигун 2 через гнучкий зв'язок приводить до обертання маховик 3 і жорстко з'єднаний з ним кривошипний вал 4. При відсутності подачі стисненого...
Механічний безмуфтовий прес

Номер патенту: 68779
Опубліковано: 16.08.2004
Автор: Запорожченко Віталій Сергійович
МПК: B30B 15/00
Мітки: механічний, прес, безмуфтовий
Формула / Реферат:
Механічний безмуфтовий прес, що складається із станини, кривошипного вала, який змонтовано в підшипникових опорах станини і зв'язано з електродвигуном за допомогою маховика та гнучкого зв'язку, ексцентрикової втулки, що має ексцентриситет, рівний радіусу кривошипа, встановлена на останньому і охоплюється великою головкою шатуна, а в тілі ексцентрикової втулки в радіальному напрямку виконано отвір, в якому розміщено регулювальний гвинт,...
Механічний безмуфтовий прес

Номер патенту: 18800
Опубліковано: 15.11.2006
Автори: Коваль Євген Миколайович, Запорожченко Віталій Сергійович
МПК: B30B 15/00
Мітки: прес, механічний, безмуфтовий
Формула / Реферат:
1. Механічний безмуфтовий прес, що містить станину, кривошипний вал, змонтований в підшипникових опорах станини і зв'язаний з електродвигуном за допомогою маховика та гнучкого зв'язку, встановлену на кривошипі ексцентрикову втулку, ексцентриситет якої рівний радіусу кривошипа і яка охоплюється великою головкою шатуна, в тілі ексцентрикової втулки в радіальному напрямку виконано отвір, в якому розміщено регулювальний гвинт, пружину та...
Попередній патент: Нахилений дифузійний апарат
Наступний патент: Зуболікарський вимірювальний прилад рабовіла
Випадковий патент: Спосіб виробництва копчено-варених виробів зі свинини