Плавцевий рушій апарата
Номер патенту: 25355
Опубліковано: 30.10.1998
Автори: Поліщук Сергій Володимирович, Коробов Віталій Ілліч, Бабенко Віктор Вітальович
Формула / Реферат
Плавниковый движитель аппарата, содержащий стебель со встроенным в нем электродвигателем, отличающийся тем, что последний имеет выходные оси, размещенные перпендикулярно продольной оси подводного аппарата, переходящие в двуплечий рычаг, соединенный с плавниковым движителем, а последний имеет в своем теле электродвигатель с шестерней, расположенной между рейками, соединенными посредством фигурных рычагов с пластинами.
Текст
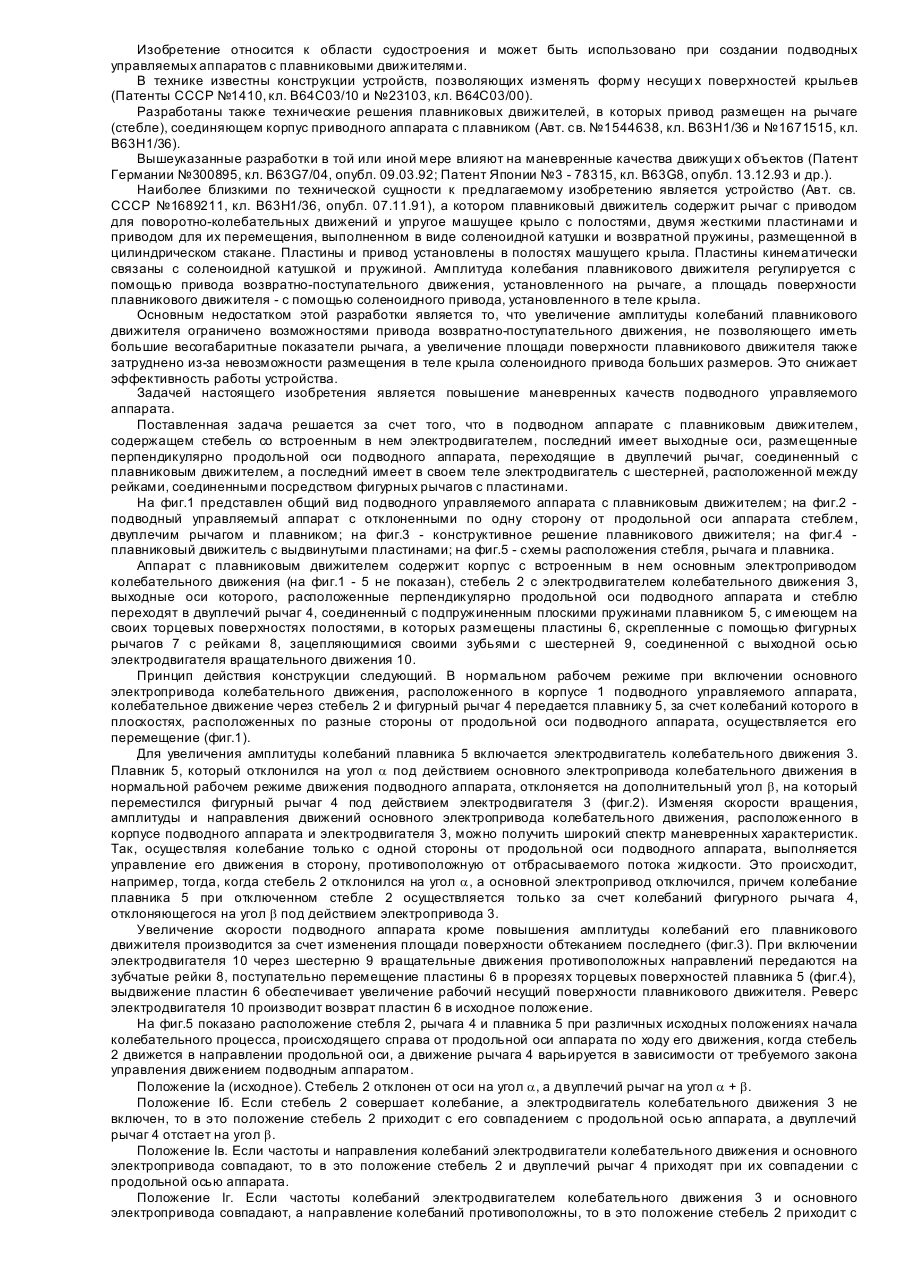
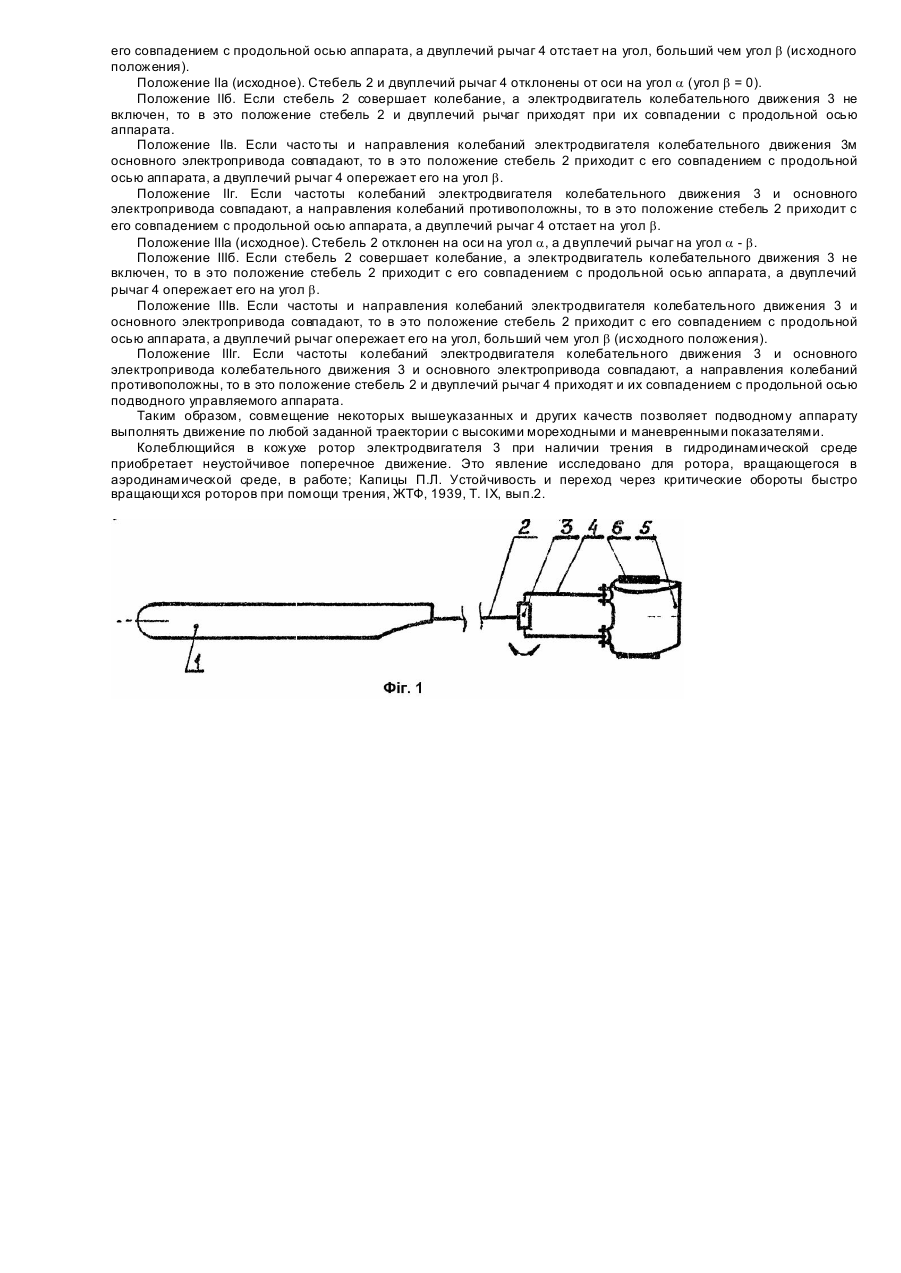
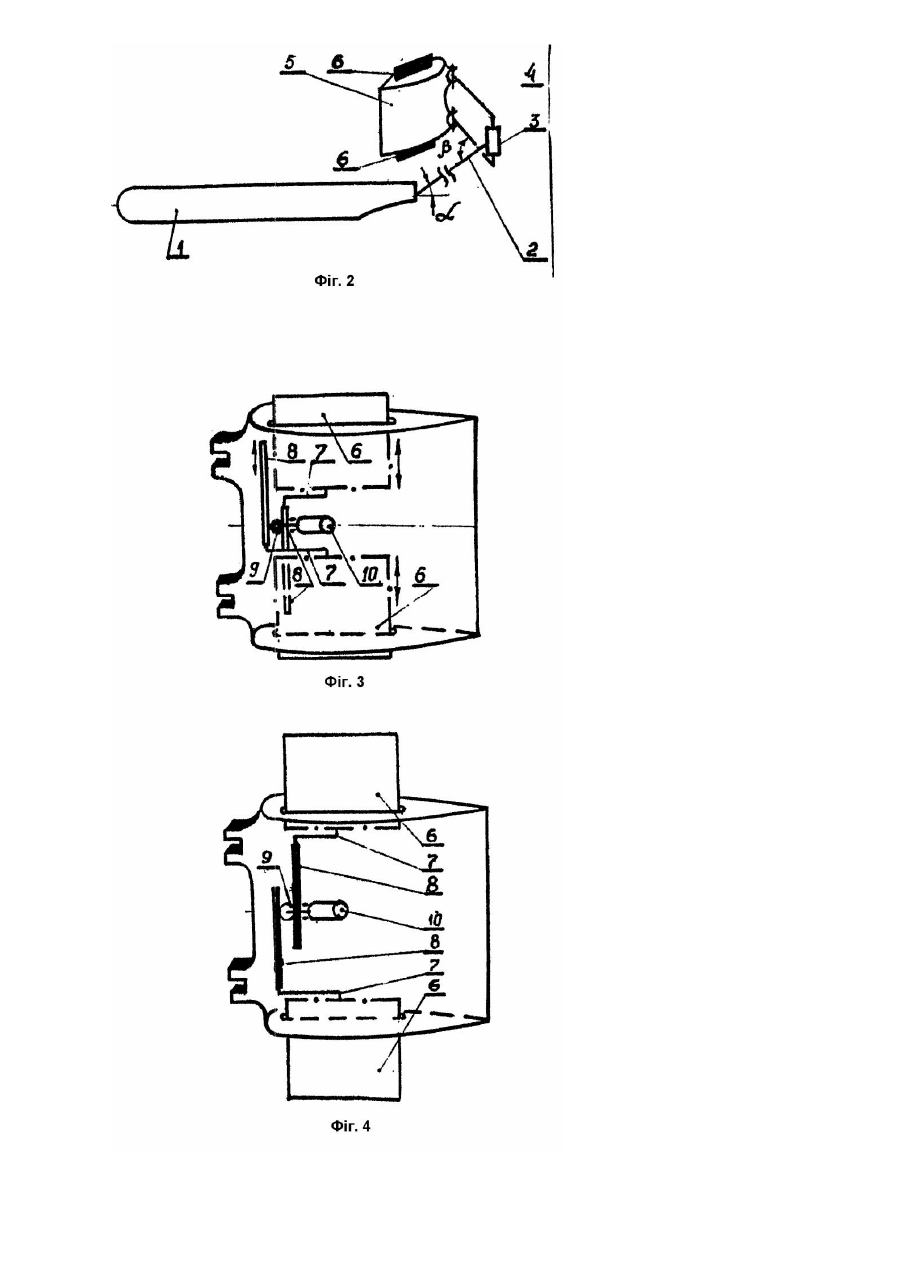
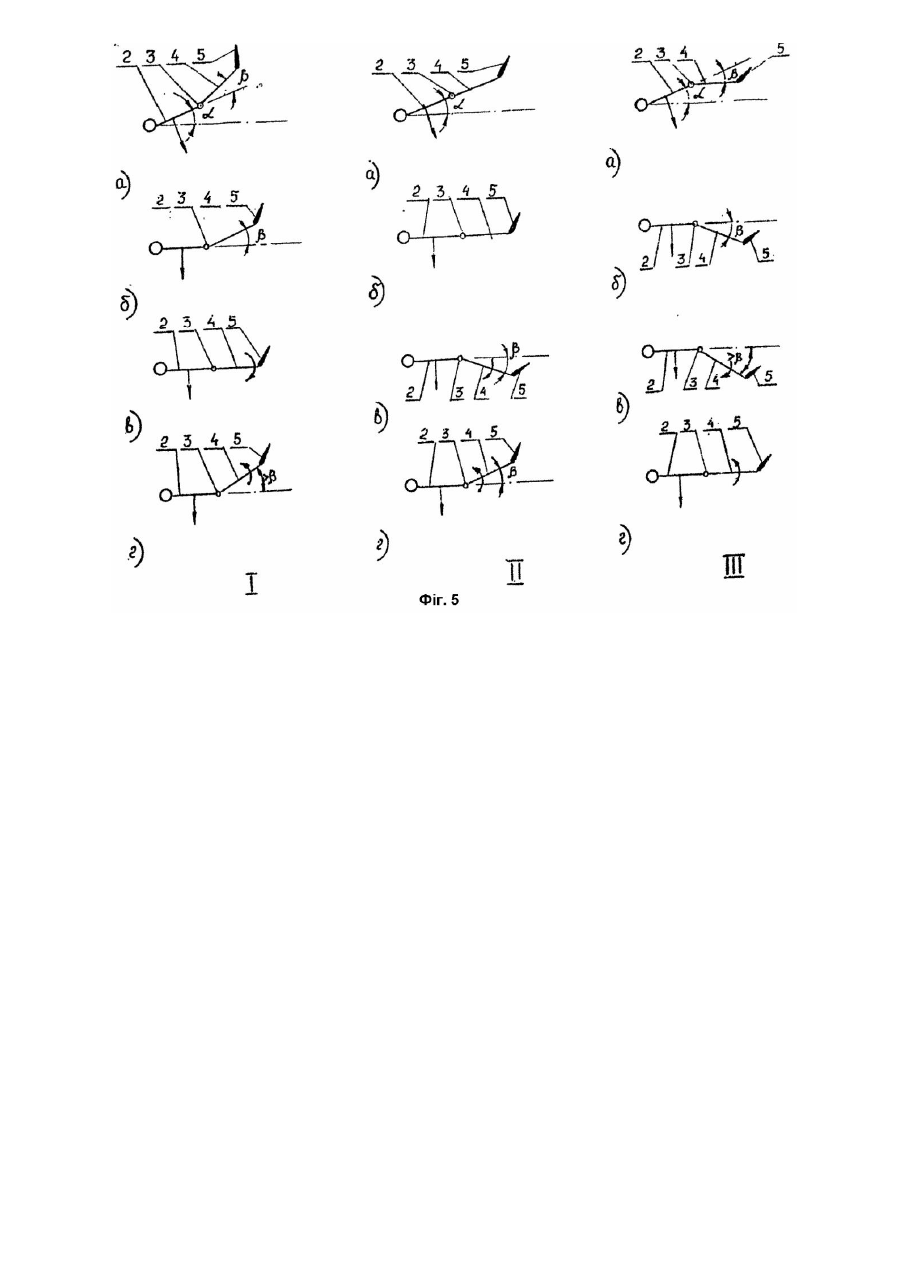
Изобретение относится к области судостроения и может быть использовано при создании подводных управляемых аппаратов с плавниковыми движителями. В технике известны конструкции устройств, позволяющих изменять форму несущи х поверхностей крыльев (Патенты СССР №1410, кл. B64C03/10 и №23103, кл. B64C03/00). Разработаны также технические решения плавниковых движителей, в которых привод размещен на рычаге (стебле), соединяющем корпус приводного аппарата с плавником (Авт. св. №1544638, кл. B63H1/36 и №1671515, кл. B63H1/36). Вышеуказанные разработки в той или иной мере влияют на маневренные качества движущи х объектов (Патент Германии №300895, кл. B63G7/04, опубл. 09.03.92; Патент Японии №3 - 78315, кл. B63G8, опубл. 13.12.93 и др.). Наиболее близкими по технической сущности к предлагаемому изобретению является устройство (Авт. св. СССР №1689211, кл. B63H1/36, опубл. 07.11.91), а котором плавниковый движитель содержит рычаг с приводом для поворотно-колебательных движений и упругое машущее крыло с полостями, двумя жесткими пластинами и приводом для их перемещения, выполненном в виде соленоидной катушки и возвратной пружины, размещенной в цилиндрическом стакане. Пластины и привод установлены в полостях машущего крыла. Пластины кинематически связаны с соленоидной катушкой и пружиной. Амплитуда колебания плавникового движителя регулируется с помощью привода возвратно-поступательного движения, установленного на рычаге, а площадь поверхности плавникового движителя - с помощью соленоидного привода, установленного в теле крыла. Основным недостатком этой разработки является то, что увеличение амплитуды колебаний плавникового движителя ограничено возможностями привода возвратно-поступательного движения, не позволяющего иметь большие весогабаритные показатели рычага, а увеличение площади поверхности плавникового движителя также затруднено из-за невозможности размещения в теле крыла соленоидного привода больших размеров. Это снижает эффективность работы устройства. Задачей настоящего изобретения является повышение маневренных качеств подводного управляемого аппарата. Поставленная задача решается за счет того, что в подводном аппарате с плавниковым движителем, содержащем стебель со встроенным в нем электродвигателем, последний имеет выходные оси, размещенные перпендикулярно продольной оси подводного аппарата, переходящие в двуплечий рычаг, соединенный с плавниковым движителем, а последний имеет в своем теле электродвигатель с шестерней, расположенной между рейками, соединенными посредством фигурных рычагов с пластинами. На фиг.1 представлен общий вид подводного управляемого аппарата с плавниковым движителем; на фиг.2 подводный управляемый аппарат с отклоненными по одну сторону от продольной оси аппарата стеблем, двуплечим рычагом и плавником; на фиг.3 - конструктивное решение плавникового движителя; на фиг.4 плавниковый движитель с выдвинутыми пластинами; на фиг.5 - схемы расположения стебля, рычага и плавника. Аппарат с плавниковым движителем содержит корпус с встроенным в нем основным электроприводом колебательного движения (на фиг.1 - 5 не показан), стебель 2 с электродвигателем колебательного движения 3, выходные оси которого, расположенные перпендикулярно продольной оси подводного аппарата и стеблю переходят в двуплечий рычаг 4, соединенный с подпружиненным плоскими пружинами плавником 5, с имеющем на своих торцевых поверхностях полостями, в которых размещены пластины 6, скрепленные с помощью фигурных рычагов 7 с рейками 8, зацепляющимися своими зубьями с шестерней 9, соединенной с выходной осью электродвигателя вращательного движения 10. Принцип действия конструкции следующий. В нормальном рабочем режиме при включении основного электропривода колебательного движения, расположенного в корпусе 1 подводного управляемого аппарата, колебательное движение через стебель 2 и фигурный рычаг 4 передается плавнику 5, за счет колебаний которого в плоскостях, расположенных по разные стороны от продольной оси подводного аппарата, осуществляется его перемещение (фиг.1). Для увеличения амплитуды колебаний плавника 5 включается электродвигатель колебательного движения 3. Плавник 5, который отклонился на угол a под действием основного электропривода колебательного движения в нормальной рабочем режиме движения подводного аппарата, отклоняется на дополнительный угол b, на который переместился фигурный рычаг 4 под действием электродвигателя 3 (фиг.2). Изменяя скорости вращения, амплитуды и направления движений основного электропривода колебательного движения, расположенного в корпусе подводного аппарата и электродвигателя 3, можно получить широкий спектр маневренных характеристик. Так, осуществляя колебание только с одной стороны от продольной оси подводного аппарата, выполняется управление его движения в сторону, противоположную от отбрасываемого потока жидкости. Это происходит, например, тогда, когда стебель 2 отклонился на угол a, а основной электропривод отключился, причем колебание плавника 5 при отключенном стебле 2 осуществляется только за счет колебаний фигурного рычага 4, отклоняющегося на угол b под действием электропривода 3. Увеличение скорости подводного аппарата кроме повышения амплитуды колебаний его плавникового движителя производится за счет изменения площади поверхности обтеканием последнего (фиг.3). При включении электродвигателя 10 через шестерню 9 вращательные движения противоположных направлений передаются на зубчатые рейки 8, поступательно перемещение пластины 6 в прорезях торцевых поверхностей плавника 5 (фиг.4), выдвижение пластин 6 обеспечивает увеличение рабочий несущий поверхности плавникового движителя. Реверс электродвигателя 10 производит возврат пластин 6 в исходное положение. На фиг.5 показано расположение стебля 2, рычага 4 и плавника 5 при различных исходных положениях начала колебательного процесса, происходящего справа от продольной оси аппарата по ходу его движения, когда стебель 2 движется в направлении продольной оси, а движение рычага 4 варьируется в зависимости от требуемого закона управления движением подводным аппаратом. Положение Iа (исходное). Стебель 2 отклонен от оси на угол a, а двуплечий рычаг на угол a + b. Положение Iб. Если стебель 2 совершает колебание, а электродвигатель колебательного движения 3 не включен, то в это положение стебель 2 приходит с его совпадением с продольной осью аппарата, а двуплечий рычаг 4 отстает на угол b. Положение Iв. Если частоты и направления колебаний электродвигатели колебательного движения и основного электропривода совпадают, то в это положение стебель 2 и двуплечий рычаг 4 приходят при их совпадении с продольной осью аппарата. Положение Iг. Если частоты колебаний электродвигателем колебательного движения 3 и основного электропривода совпадают, а направление колебаний противоположны, то в это положение стебель 2 приходит с его совпадением с продольной осью аппарата, а двуплечий рычаг 4 отстает на угол, больший чем угол b (исходного положения). Положение IIа (исходное). Стебель 2 и двуплечий рычаг 4 отклонены от оси на угол a (угол b = 0). Положение IIб. Если стебель 2 совершает колебание, а электродвигатель колебательного движения 3 не включен, то в это положение стебель 2 и двуплечий рычаг приходят при их совпадении с продольной осью аппарата. Положение IIв. Если часто ты и направления колебаний электродвигателя колебательного движения 3м основного электропривода совпадают, то в это положение стебель 2 приходит с его совпадением с продольной осью аппарата, а двуплечий рычаг 4 опережает его на угол b. Положение IIг. Если частоты колебаний электродвигателя колебательного движения 3 и основного электропривода совпадают, а направления колебаний противоположны, то в это положение стебель 2 приходит с его совпадением с продольной осью аппарата, а двуплечий рычаг 4 отстает на угол b. Положение IIIа (исходное). Стебель 2 отклонен на оси на угол a, а двуплечий рычаг на угол a - b. Положение IIIб. Если стебель 2 совершает колебание, а электродвигатель колебательного движения 3 не включен, то в это положение стебель 2 приходит с его совпадением с продольной осью аппарата, а двуплечий рычаг 4 опережает его на угол b. Положение IIIв. Если частоты и направления колебаний электродвигателя колебательного движения 3 и основного электропривода совпадают, то в это положение стебель 2 приходит с его совпадением с продольной осью аппарата, а двуплечий рычаг опережает его на угол, больший чем угол b (исходного положения). Положение IIIг. Если частоты колебаний электродвигателя колебательного движения 3 и основного электропривода колебательного движения 3 и основного электропривода совпадают, а направления колебаний противоположны, то в это положение стебель 2 и двуплечий рычаг 4 приходят и их совпадением с продольной осью подводного управляемого аппарата. Таким образом, совмещение некоторых вышеуказанных и других качеств позволяет подводному аппарату выполнять движение по любой заданной траектории с высокими мореходными и маневренными показателями. Колеблющийся в кожухе ротор электродвигателя 3 при наличии трения в гидродинамической среде приобретает неустойчивое поперечное движение. Это явление исследовано для ротора, вращающегося в аэродинамической среде, в работе; Капицы П.Л. Устойчивость и переход через критические обороты быстро вращающи хся роторов при помощи трения, ЖТФ, 1939, Т. IX, вып.2.
ДивитисяДодаткова інформація
Автори англійськоюPolischuk Serhii Volodymyrovych, Babenko Viktor Vitaliovych, Korobov Vitalii Illich
Автори російськоюПолищук Сергей Владимирович, Бабенко Виктор Витальевич, Коробов Виталий Ильич
МПК / Мітки
МПК: B63H 1/36
Мітки: рушій, апарата, плавцевий
Код посилання
<a href="https://ua.patents.su/4-25355-plavcevijj-rushijj-aparata.html" target="_blank" rel="follow" title="База патентів України">Плавцевий рушій апарата</a>
Рушій для літального апарата
Номер патенту: 20044
Опубліковано: 25.12.1997
Автор: Лозовий Петро Петрович
МПК: B64C 29/00, B64C 27/00
Мітки: літального, апарата, рушій
Формула / Реферат:
Движитель для летательного аппарата, состоящий из вала, двух винтов, передаточного устройства крутящего момента, двигателя, выхлопной трубы, рулевых плоскостей, отличающийся тем, что два винта установлены в вертикальной плоскости вращения и с наружных сторон закрыты сплошными дисками, лопасти винтов имеют постоянный угол атаки, между винтами установлена несущая поверхность, диски скреплены стержнями, в передаточном устройстве крутящего...
Судновий напівзанурений рушій
Номер патенту: 19663
Опубліковано: 25.12.1997
Автор: Слинько Петро Петрович
Мітки: судновий, рушій, напівзанурений
Формула / Реферат:
1. Судовой полупогружной движитель, содержащий гребной вал, размещенный под углом к продольной вертикальной плоскости судна, с полупогружными гребными лопастями, размещенными с возможностью изменения положения по отношению к продольной вертикальной плоскости и/или к основной плоскости судна, отличающийся тем, что при входе в воду нагнетающая сторона каждой лопасти расположена по существу перпендикулярно продольной вертикальной плоскости...
Спосіб вимушеної посадки літального апарата на воду

Номер патенту: 15604
Опубліковано: 30.06.1997
Автори: Іванов Віктор Михайлович, Бєлявскій Алєксандр Ніколаєвіч, Гонцова Ларіса Гєннадієвна
МПК: B64C 25/00
Мітки: вимушеної, спосіб, апарата, посадки, літального, воду
Формула / Реферат:
Способ вынужденной посадки летательного аппарата на воду, снабженного трехопорным неубирающимся лыжным шасси с носовой опорой, включающий снижение, выравнивание, выдерживание и пробег по воде, отличающийся тем, что на этапе снижения, путем постановки на упор, исключают поворот лыж при пробеге по воде основных опор в сторону отклонения на положительные углы, а носовой опоры - в сторону отклонения на отрицательные углы относительно исходных...
Універсальний інерційний рушій ігнатова
Номер патенту: 17203
Опубліковано: 01.04.1997
Автори: Ігнатов Іван Георгійович, Черезова Олена Іванівна
МПК: F03G 3/06
Мітки: універсальний, інерційний, рушій, ігнатова
Формула / Реферат:
Универсальный инерционный движитель, включающий связанный с приводом корпус, на кронштейнах которого размещены рычаги с инерционными грузами и рычаги, связанные с упругим элементом, отличающийся тем, что рычаги с инерционными грузами и рычаги, связанные с упругим элементом жестко связаны с планками, закрепленными на корпусе с возможностью движения, при этом упругий элемент в статике обеспечивает возможность отклонения рычагов с инерционными...
Система управління двигуновою установкою літального апарата
Номер патенту: 18763
Опубліковано: 25.12.1997
Автори: Распопов Євген Вікторович, Епельбаум Анатолій Григорович, Іщук Віктор Петрович, Світський Олег Лазаревич
МПК: B64D 31/00
Мітки: управління, літального, двигуновою, система, установкою, апарата
Формула / Реферат:
Система управления двигательной установкой летательного аппарата, содержащая рычаг управления двигателем, кинематически соединенный с электрическим приводом и датчиком угла отклонения рычага управления двигателем, механизм подачи топлива, кран топливного агрегата, блок аэродинамических данных, блок расчета требуемой тяги, выход которого соединен с делителем, отличающаяся тем, что она дополнительно снабжена блоком расчета командной тяги,...
Попередній патент: Спосіб одержання імуномодулювальної речовини
Наступний патент: Складений плавцевий рушій
Випадковий патент: Установка для циркуляційного піролізу інфікованих медичних відходів