Складений плавцевий рушій
Номер патенту: 25356
Опубліковано: 30.10.1998
Автори: Поліщук Сергій Володимирович, Коробов Віталій Ілліч, Бабенко Віктор Вітальович
Формула / Реферат
Составной плавниковый движитель, содержащий стебель со встроенным в нем электродвигателем и многосоставное крыло, отличающийся тем, что в передней части крыла расположены соленоиды с сердечником и перемычка, которая с помощью прорези соединена со средней частью крыла, которая в свою очередь содержит соленоиды с сердечником и перемычку, которая с помощью прорези соединена с задней частью крыла, а электродвигатель стебля своим валом жестко связан с оконечной частью стебля, скрепленной с передней частью крыла с возможностью ее поворота и реверса на угол от 0° до 360° от продольной оси движителя.
Текст
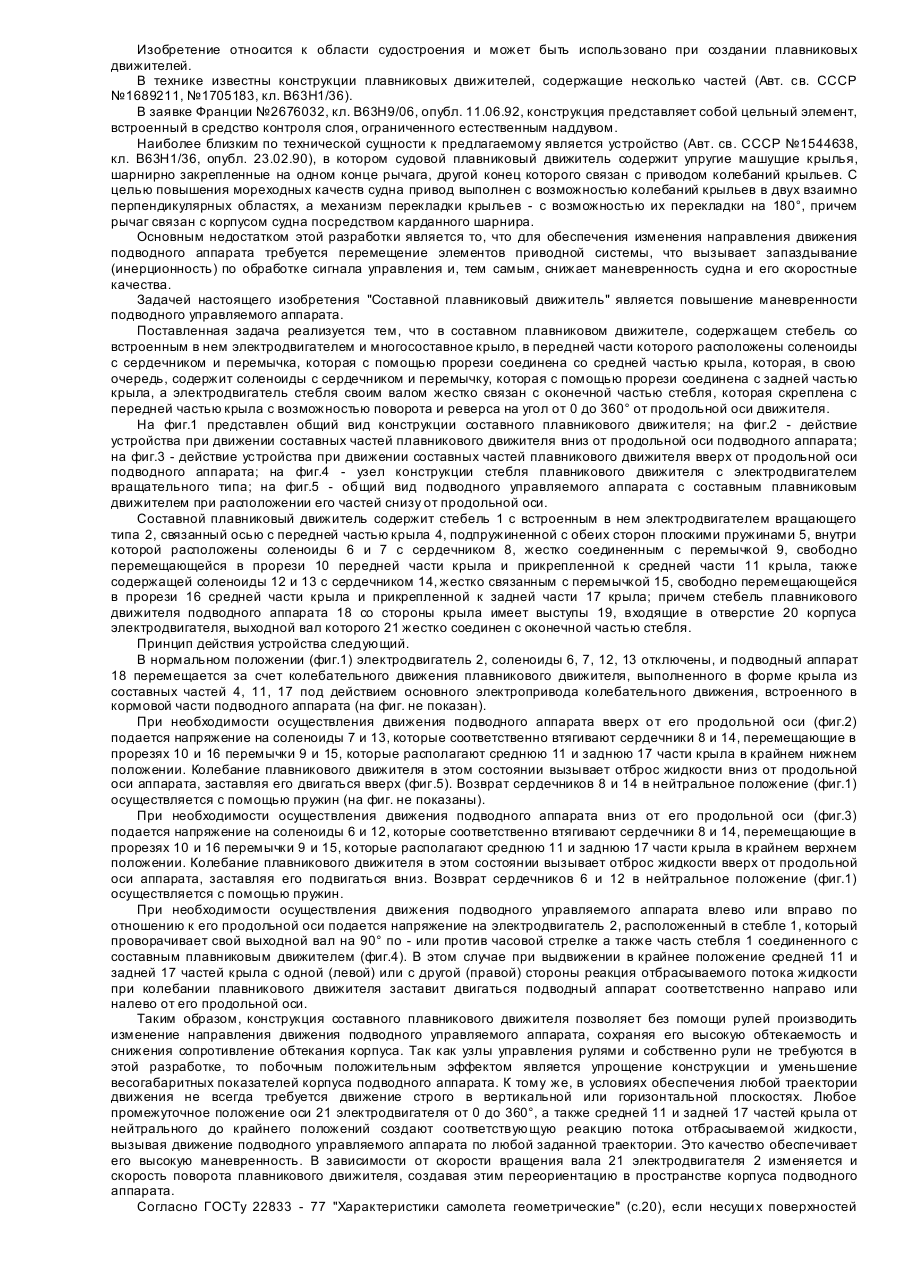
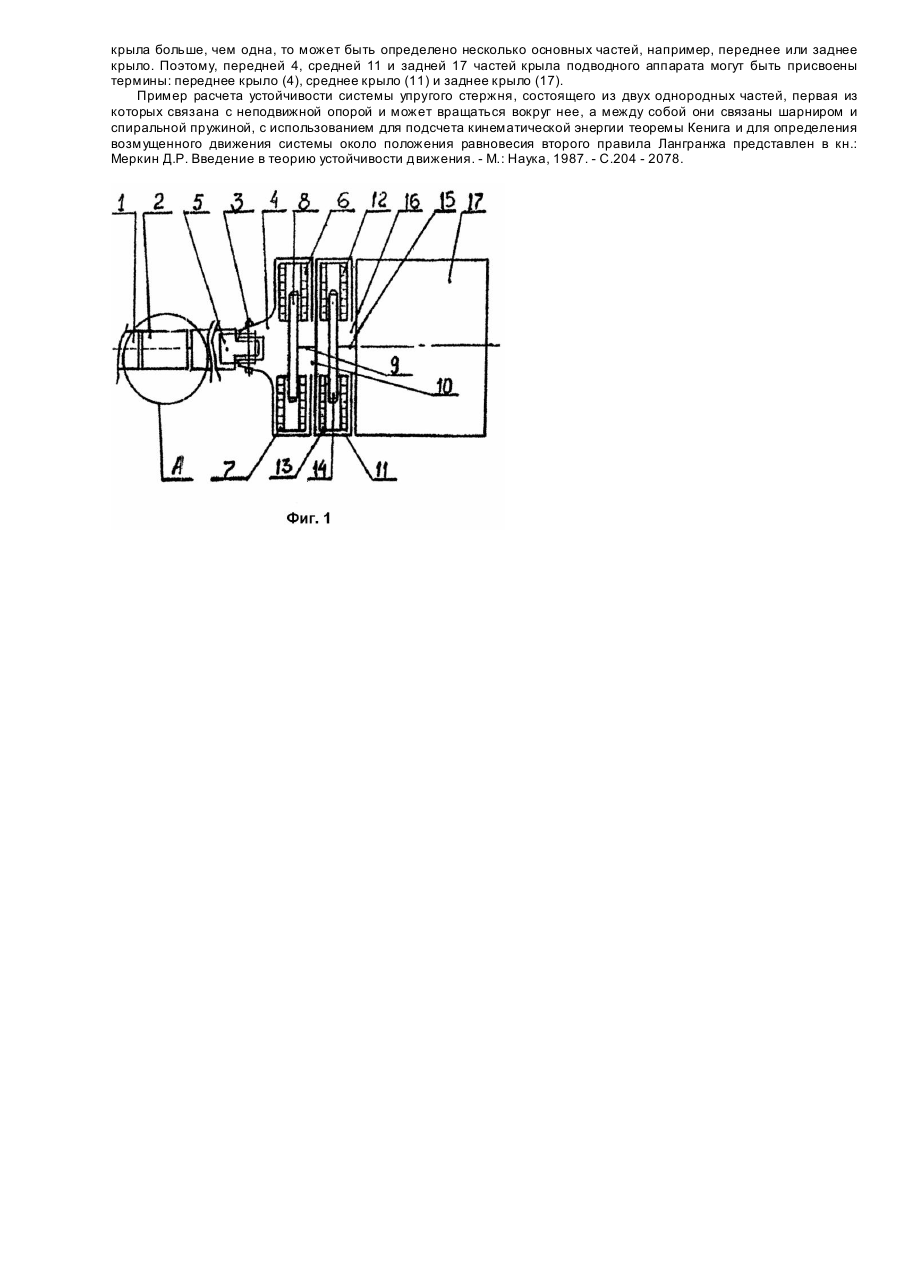
Изобретение относится к области судостроения и может быть использовано при создании плавниковых движителей. В технике известны конструкции плавниковых движителей, содержащие несколько частей (Авт. св. СССР №1689211, №1705183, кл. B63H1/36). В заявке Франции №2676032, кл. B63H9/06, опубл. 11.06.92, конструкция представляет собой цельный элемент, встроенный в средство контроля слоя, ограниченного естественным наддувом. Наиболее близким по технической сущности к предлагаемому является устройство (Авт. св. СССР №1544638, кл. B63H1/36, опубл. 23.02.90), в котором судовой плавниковый движитель содержит упругие машущие крылья, шарнирно закрепленные на одном конце рычага, другой конец которого связан с приводом колебаний крыльев. С целью повышения мореходных качеств судна привод выполнен с возможностью колебаний крыльев в двух взаимно перпендикулярных областях, а механизм перекладки крыльев - с возможностью их перекладки на 180°, причем рычаг связан с корпусом судна посредством карданного шарнира. Основным недостатком этой разработки является то, что для обеспечения изменения направления движения подводного аппарата требуется перемещение элементов приводной системы, что вызывает запаздывание (инерционность) по обработке сигнала управления и, тем самым, снижает маневренность судна и его скоростные качества. Задачей настоящего изобретения "Составной плавниковый движитель" является повышение маневренности подводного управляемого аппарата. Поставленная задача реализуется тем, что в составном плавниковом движителе, содержащем стебель со встроенным в нем электродвигателем и многосоставное крыло, в передней части которого расположены соленоиды с сердечником и перемычка, которая с помощью прорези соединена со средней частью крыла, которая, в свою очередь, содержит соленоиды с сердечником и перемычку, которая с помощью прорези соединена с задней частью крыла, а электродвигатель стебля своим валом жестко связан с оконечной частью стебля, которая скреплена с передней частью крыла с возможностью поворота и реверса на угол от 0 до 360° от продольной оси движителя. На фиг.1 представлен общий вид конструкции составного плавникового движителя; на фиг.2 - действие устройства при движении составных частей плавникового движителя вниз от продольной оси подводного аппарата; на фиг.3 - действие устройства при движении составных частей плавникового движителя вверх от продольной оси подводного аппарата; на фиг.4 - узел конструкции стебля плавникового движителя с электродвигателем вращательного типа; на фиг.5 - общий вид подводного управляемого аппарата с составным плавниковым движителем при расположении его частей снизу от продольной оси. Составной плавниковый движитель содержит стебель 1 с встроенным в нем электродвигателем вращающего типа 2, связанный осью с передней частью крыла 4, подпружиненной с обеих сторон плоскими пружинами 5, внутри которой расположены соленоиды 6 и 7 с сердечником 8, жестко соединенным с перемычкой 9, свободно перемещающейся в прорези 10 передней части крыла и прикрепленной к средней части 11 крыла, также содержащей соленоиды 12 и 13 с сердечником 14, жестко связанным с перемычкой 15, свободно перемещающейся в прорези 16 средней части крыла и прикрепленной к задней части 17 крыла; причем стебель плавникового движителя подводного аппарата 18 со стороны крыла имеет выступы 19, входящие в отверстие 20 корпуса электродвигателя, выходной вал которого 21 жестко соединен с оконечной частью стебля. Принцип действия устройства следующий. В нормальном положении (фиг.1) электродвигатель 2, соленоиды 6, 7, 12, 13 отключены, и подводный аппарат 18 перемещается за счет колебательного движения плавникового движителя, выполненного в форме крыла из составных частей 4, 11, 17 под действием основного электропривода колебательного движения, встроенного в кормовой части подводного аппарата (на фиг. не показан). При необходимости осуществления движения подводного аппарата вверх о т его продольной оси (фиг.2) подается напряжение на соленоиды 7 и 13, которые соответственно втягивают сердечники 8 и 14, перемещающие в прорезях 10 и 16 перемычки 9 и 15, которые располагают среднюю 11 и заднюю 17 части крыла в крайнем нижнем положении. Колебание плавникового движителя в этом состоянии вызывает отброс жидкости вниз от продольной оси аппарата, заставляя его двигаться вверх (фиг.5). Возврат сердечников 8 и 14 в нейтральное положение (фиг.1) осуществляется с помощью пружин (на фиг. не показаны). При необходимости осуществления движения подводного аппарата вниз от его продольной оси (фиг.3) подается напряжение на соленоиды 6 и 12, которые соответственно втягивают сердечники 8 и 14, перемещающие в прорезях 10 и 16 перемычки 9 и 15, которые располагают среднюю 11 и заднюю 17 части крыла в крайнем верхнем положении. Колебание плавникового движителя в этом состоянии вызывает отброс жидкости вверх от продольной оси аппарата, заставляя его подвигаться вниз. Возврат сердечников 6 и 12 в нейтральное положение (фиг.1) осуществляется с помощью пружин. При необходимости осуществления движения подводного управляемого аппарата влево или вправо по отношению к его продольной оси подается напряжение на электродвигатель 2, расположенный в стебле 1, который проворачивает свой выходной вал на 90° по - или против часовой стрелке а также часть стебля 1 соединенного с составным плавниковым движителем (фиг.4). В этом случае при выдвижении в крайнее положение средней 11 и задней 17 частей крыла с одной (левой) или с другой (правой) стороны реакция отбрасываемого потока жидкости при колебании плавникового движителя заставит двигаться подводный аппарат соответственно направо или налево от его продольной оси. Таким образом, конструкция составного плавникового движителя позволяет без помощи рулей производить изменение направления движения подводного управляемого аппарата, сохраняя его высокую обтекаемость и снижения сопротивление обтекания корпуса. Так как узлы управления рулями и собственно рули не требуются в этой разработке, то побочным положительным эффектом является упрощение конструкции и уменьшение весогабаритных показателей корпуса подводного аппарата. К тому же, в условиях обеспечения любой траектории движения не всегда требуется движение строго в вертикальной или горизонтальной плоскостях. Любое промежуточное положение оси 21 электродвигателя от 0 до 360°, а также средней 11 и задней 17 частей крыла от нейтрального до крайнего положений создают соответствующую реакцию потока отбрасываемой жидкости, вызывая движение подводного управляемого аппарата по любой заданной траектории. Это качество обеспечивает его высокую маневренность. В зависимости от скорости вращения вала 21 электродвигателя 2 изменяется и скорость поворота плавникового движителя, создавая этим переориентацию в пространстве корпуса подводного аппарата. Согласно ГОСТу 22833 - 77 "Характеристики самолета геометрические" (с.20), если несущи х поверхностей крыла больше, чем одна, то может быть определено несколько основных частей, например, переднее или заднее крыло. Поэтому, передней 4, средней 11 и задней 17 частей крыла подводного аппарата могут быть присвоены термины: переднее крыло (4), среднее крыло (11) и заднее крыло (17). Пример расчета устойчивости системы упругого стержня, состоящего из двух однородных частей, первая из которых связана с неподвижной опорой и может вращаться вокруг нее, а между собой они связаны шарниром и спиральной пружиной, с использованием для подсчета кинематической энергии теоремы Кенига и для определения возмущенного движения системы около положения равновесия второго правила Лангранжа представлен в кн.: Меркин Д.Р. Введение в теорию устойчивости движения. - М.: Наука, 1987. - С.204 - 2078.
ДивитисяДодаткова інформація
Автори англійськоюPolischuk Serhii Volodymyrovych, Babenko Viktor Vitaliovych, Korobov Vitalii Illich
Автори російськоюПолищук Сергей Владимирович, Бабенко Виктор Витальевич, Коробов Виталий Ильич
МПК / Мітки
МПК: B63H 1/36
Мітки: складений, рушій, плавцевий
Код посилання
<a href="https://ua.patents.su/3-25356-skladenijj-plavcevijj-rushijj.html" target="_blank" rel="follow" title="База патентів України">Складений плавцевий рушій</a>
Плавцевий рушій апарата
Номер патенту: 25355
Опубліковано: 30.10.1998
Автори: Коробов Віталій Ілліч, Поліщук Сергій Володимирович, Бабенко Віктор Вітальович
МПК: B63H 1/36
Мітки: апарата, плавцевий, рушій
Формула / Реферат:
Плавниковый движитель аппарата, содержащий стебель со встроенным в нем электродвигателем, отличающийся тем, что последний имеет выходные оси, размещенные перпендикулярно продольной оси подводного аппарата, переходящие в двуплечий рычаг, соединенный с плавниковым движителем, а последний имеет в своем теле электродвигатель с шестерней, расположенной между рейками, соединенными посредством фигурных рычагов с пластинами.
Судовий напівзанурений рушій
Номер патенту: 1831
Опубліковано: 20.12.1994
Автор: Слинько Петро Петрович
Мітки: напівзанурений, судовий, рушій
Формула / Реферат:
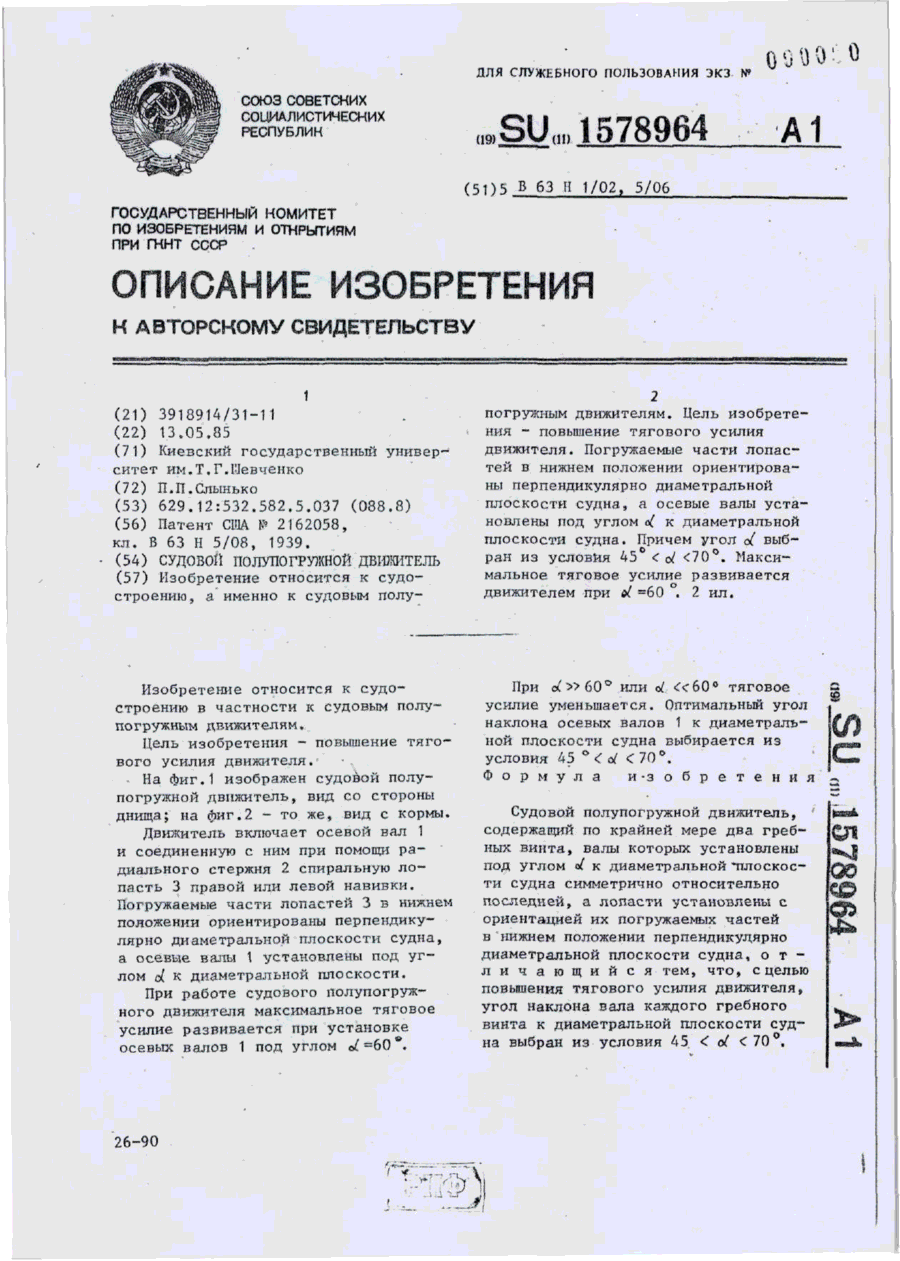
Судовой полупогружной движитель, содержащий по крайней мере два гребных винта, валы которых установлены под углом л к диаметральной плоскости судна симметрично относительно последней, а лопасти установлены с ориентацией их погружаемых частей в нижнем положении перпендикулярно диаметральной плоскости судна, отличающийсятем,что, с целью повышения тягового усилия движителя, угол наклона вала каждого гребного винта к диаметральной плоскости...
Судновий напівзанурений рушій
Номер патенту: 19663
Опубліковано: 25.12.1997
Автор: Слинько Петро Петрович
Мітки: рушій, напівзанурений, судновий
Формула / Реферат:
1. Судовой полупогружной движитель, содержащий гребной вал, размещенный под углом к продольной вертикальной плоскости судна, с полупогружными гребными лопастями, размещенными с возможностью изменения положения по отношению к продольной вертикальной плоскости и/или к основной плоскости судна, отличающийся тем, что при входе в воду нагнетающая сторона каждой лопасти расположена по существу перпендикулярно продольной вертикальной плоскости...
Водометний рушій

Номер патенту: 23664
Опубліковано: 02.06.1998
Автор: Хаян Олександр Іванович
МПК: B63H 11/00
Мітки: водометний, рушій
Формула / Реферат:
Водометный двигатель, содержащий корпус с источником давления, соединенный с, по меньшей мере, одним водоводом имеющим водозаборник. отличающийся тем. что водовод оснащен коленом, верхняя внутренняя поверхность которого расположена в одной плоскости с внутренними поверхностями нижних прямолинейных участков водовода, а водозаборник установлен в нижней части колена.
Універсальний інерційний рушій ігнатова
Номер патенту: 17203
Опубліковано: 01.04.1997
Автори: Ігнатов Іван Георгійович, Черезова Олена Іванівна
МПК: F03G 3/06
Мітки: ігнатова, рушій, універсальний, інерційний
Формула / Реферат:
Универсальный инерционный движитель, включающий связанный с приводом корпус, на кронштейнах которого размещены рычаги с инерционными грузами и рычаги, связанные с упругим элементом, отличающийся тем, что рычаги с инерционными грузами и рычаги, связанные с упругим элементом жестко связаны с планками, закрепленными на корпусе с возможностью движения, при этом упругий элемент в статике обеспечивает возможность отклонения рычагов с инерционными...
Попередній патент: Плавцевий рушій апарата
Наступний патент: Засіб для запобігання змерзання та примерзання сипучих матеріалів
Випадковий патент: Спосіб очищення та розділення багатокомпонентної суміші та пристрій для його здійснення