Пристрій обчислення відстані між літаками у парафазному коді
Номер патенту: 27574
Опубліковано: 12.11.2007
Автори: Пащенко Наталія Вікторівна, Синельников Олексій Олексійович, Жуков Ігор Анатолійович
Формула / Реферат
Пристрій обчислення відстані між літаками у парафазному коді, що містить вимірювач азимутів, вимірювач висот польоту повітряних суден, вимірювач похилих дальності, блок перетворення коду, комутатор, суматор, блок множення, блок обчислення косинусу, блок обчислення квадратного кореня та індикатор, причому входи пристрою є входами вимірювача азимутів, вимірювача висот польоту повітряних суден та вимірювача похилих дальності, виходи яких є входами блока перетворення коду, виходи якого є першою групою входів комутатора, який відрізняється тим, що першою групою виходів комутатора є входи суматора, другою групою виходів комутатора є входи блока множення, третьою групою виходів комутатора є входи блока обчислення косинусу, четвертою групою виходів комутатора є входи блока обчислення квадратного кореня, п'ятою групою виходів комутатора є входи індикатора, а виходи суматора є другою групою входів комутатора, виходи блока множення є третьою групою входів комутатора, виходи блока обчислення косинусу є четвертою групою входів комутатора, виходи блока обчислення квадратного кореня є п'ятою групою входів комутатора.
Текст
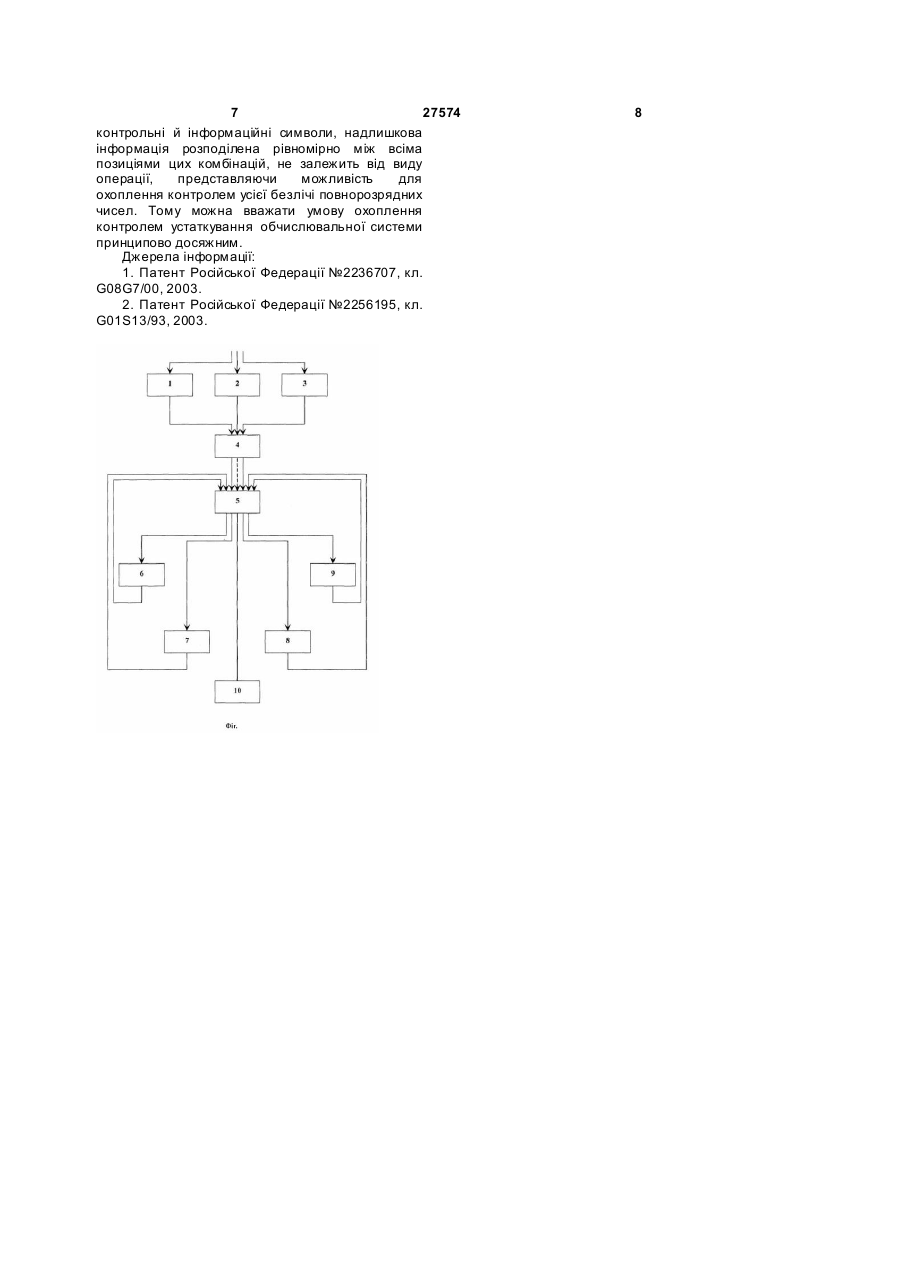
Пристрій обчислення відстані між літаками у парафазному коді, що містить вимірювач азимутів, вимірювач висот польоту повітряних суден, вимірювач похилих дальності, блок перетворення коду, комутатор, суматор, блок множення, блок обчислення косинусу, блок обчислення квадратного кореня та індикатор, причому входи пристрою є входами вимірювача азимутів, 3 27574 4 другим входом шостого блоку множення, вихід На кресленні 1 зображена блок-схема шостого блоку множення з'єднаний із входом пристрою обчислення відстані між літаками у першого блоку обчислення кореня квадратного, парафазному коді. вихід якого з'єднаний із другим входом сьомого Пристрій обчислення відстані між літаками у блоку множення, вихід якого з'єднаний з першим парафазному коді який містить вимірювач азимутів входом четвертого суматора, вихід четвертого - 1, вимірювач висот польоту повітряних судів - 2, суматора з'єднаний із входом другого блоку вимірювач похилих дальності - 3, блок обчислення кореня квадратного, вихід якого перетворення коду - 4, комутатор - 5, суматор - 6, з'єднаний із входом індикатору. блок множення -7, блок обчислення косинусу - 8, Недоліком даного пристрою є обмеженість блок обчислення квадратного кореня - 9 та функціональних можливостей, а саме індикатор - 10. неможливість контролю достовірності обчислень Входи пристрою є входами вимірювача параметрів руху повітряних суден. азимутів 1, вимірювача висот польоту повітряних Задачею корисної моделі є удосконалення судів 2 та вимірювача похилих дальності 3, виходи пристрою шляхом видалення одного вимірювача яких є входами блоку перетворення коду 4, виходи азимутів, одного вимірювача висот польоту якого є першою групою входів комутатор у 5, а повітряних судів, одного вимірювача похилих також, згідно з корисною моделлю, першою групою дальності, трьох суматорів, п'ятьох блоків виходів комутатору 5 є входи суматора 6, другою множення, блоку обчислення квадратного кореня групою виходів комутатору 5 є входи блоку та вдосконалення комунікаційних якостей множення 7, третьою групою виходів комутатору 5 вимірювачів. є входи блоку обчислення косинусу 8, четвертою Це дозволяє забезпечити підвищення групою виходів комутатору 5 є входи блоку достовірності зберігання та обробки інформації та обчислення квадратного кореня 9, п'ятою групою скорочення ступіней у ланцюгу обробки виходів комутатору 5 є входи індикатору 10, а інформації. виходи суматору 6 є другою групою входів Поставлена задача вирішується тим, що в комутатору 5, виходи блоку множення 7 є третьою пристрої обчислення відстані між літаками у групою входів комутатору 5, виходи блоку парафазному коді, який містить вимірювач обчислення косинусу 8 є че твертою гр упою входів азимутів, вимірювач висот польоту повітряних комутатору 5, ви ходи блоку обчислення судів, вимірювач похилих дальності, блок квадратного кореня 9 є п'ятою гр упою входів перетворення коду, комутатор, суматор, блок комутатору 5. множення, блок обчислення косинусу, блок Пристрій обчислення відстані між літаками у обчислення квадратного кореня та індикатор, пара фазному коді працює в такий спосіб. причому входи пристрою є входами вимірювача Для запобігання зіткнення повітряних судів і азимутів, вимірювача висот польоту повітряних підвищення безпеки польотів за рахунок судів та вимірювача похилих дальності, виходи використання парафазного представлення даних яких є входами блоку перетворення коду, ви ходи при визначенні реальної відстані між повітряними якого є першою групою входів комутатору, а також, судами з урахуванням просторових параметрів згідно з корисною моделлю, першою групою їхнього польоту необхідно визначити згідно виходів комутатору є входи суматора, другою формули групою ви ходів комутатору с входи блоку 2 2 2 2 2 2 множення, третьою групою виходів комутатору є d + d - 2h1h 2 - 2 æ d - h ö æ d - h ö cos(a1 - a 2 ) ç 1 1 2 1 ÷ç 2 2÷ è øè ø входи блоку обчислення косинусу, четвертою групою ви ходів комутатору є входи блоку , де положення першого повітряного судна обчислення квадратного кореня, п'ятою групою визначається азимутом a 1 похилою дальністю d1 виходів комутатору є входи індикатору, а виходи висотою h1, а положення другого повітряного суматору є другою гр упою входів комутатору, судна визначається азимутом a 2, похилою виходи блоку множення є третьою групою входів дальністю d2, висотою h2 . комутатору, виходи блоку обчислення косинусу є Вимірювач азимутів 1 повітряних судів ПС1 і четвертою групою входів комутатору, ви ходи ПС2 визначає азимути a 1 й a 2 відповідно. блоку обчислення квадратного кореня є п'ятою Вимірювачі висот польоту повітряних судів ПС1 і групою входів комутатору. ПС2 визначають висоти польоту h1, h2. Вимірювачі Видалення одного вимірювача азимутів, похилих дальності до повітряних судів ПС1 і ПС2 одного вимірювача висот польоту повітряних визначають похилі дальності d1 d2 відповідно. На судів, одного вимірювача похилих дальності, трьох вхід перетворювача коду 4 схеми подаються суматорів, п'ятьох блоків множення і блоку операнди з вимірювач азимутів 1, вимірювача обчислення квадратного кореня вигідно відрізняє висот польоту повітряних судів 2, вимірювача запропонований пристрій обчислення відстані між похилих дальності в бінарному коді, причому вхідні літаками у парафазному коді від прототипу, операнди розбиваються на групи по 2 розряди в оскільки виключає виникнення помилкових кожній. Комутатор 5 отримавши дані від комбінації при обробці інформації та її зберіганні. перетворювача коду 4 дешифрує вхідний бінарний В результаті зменшується кількість ступіней у код у парафазний код. Після цього комутатор 5 ланцюгу обробки інформації, і як наслідок, передає дані для операції додавання до суматору підвищується достовірність тривалого зберігання 6, для операції множення до блоку множення 7, та обробки інформації. для обчислення косинусу до блоку обчислення 5 27574 6 косинусу 8, для обчислення квадратного кореня до Суматор 6 являє собою матрицю блоку обчислення квадратного кореня 9. На виході багатовходови х елементів І. Кількість входів суматора 6 сигнал пропорційний різниці квадратів кожного елемента І дорівнює 2М. Входи елементів похилої дальності d1 до першого повітряного судна І з'єднані з комутатором 5 визначеними шинами ПС1 і його висоти h1:d12-h12 . Цей сигнал надходить кодів операндів відповідно до обраного алфавіту. на вхід комутатора 5, а також на виході суматора 6 Шини кодів операндів з'єднані з входами матриці сигнал пропорційний різниці квадратів похилої додавання. Кожен елемент І має по два дальності d2 до другого повітряного судна ПС2 і гальванічно незалежних виходу. Перші виходи його висоти h2: d22-h22. Цей сигнал надходить крізь елементів, що відповідають однаковим переносам комутатор 5 на вхід блоку множення 7. у наступний розряд, з'єднані шинами з першою З виходу блоку множення 7 сигнал, групою виходів матриці додавання. Другі виходи, що відповідають однаковим результатам пропорційний æ d2 - h2 öæ d2 - h2 ö надходить крізь ç 1 додавання в даному розряді, з'єднані шинами з 1 ÷ç 2 2÷ è øè ø другою гр упою ви ходів матриці додавання. комутатор 5 на вхід блоку обчислення квадратного Для виконання операції множення блок кореня 9, з виходу якого сигнал, пропорційний множення 7 містить регістри множеного, множника, результату та схеми формування суми æ d2 - h2 öæ d2 - h2 ö надходить крізь комутатор на ç 1 1 ÷ç 2 2÷ часткових добутків - суматор часткових добутків, у è øè ø якому шляхом відповідної організації передач вхід блоку множення 7, на вхід якого надходить виробляється послідовне підсумовування сигнал, пропорційний cos(a 1-a 2). Після цього на часткових добутків. Операція множення виході блоку множення 7 формується сигнал, складається з n1 [(n1) - число цифрових розрядів æ d2 - h2 öæ d2 - h2 ö cos(a - a ) множника] циклів. У кожному циклі аналізується пропорційний ç 1 1 2 1 ÷ç 2 2÷ è øè ø чергова цифра множника, і якщо це 1, то до суми часткових добутків додається множене, у надходить крізь комутатор 5 надходить на вхід суматора 6. Паралельно на вході суматора противному випадку додаток не відбувається. У формується сингал з комутатора 5 отриманого з блоці множення 7 використовується схема блоку множення 7, що пропорційний добутку конвеєрного множника, яка працює в парафазному коді, у якій використовуються багатошарові схеми висоти h1 першого повітряного судна і висоти h2 з однаковою затримкою спрацьовування для другого повітряного судна: h1h2. На виході суматора 6 формується сигнал пропорційний кожного шару, що забезпечує можливість квадрату відстані між першим повітряним судном безперервного надходження нових даних на вхід ПС1 і другим повітряним судном ПС2: схеми в темпі, обумовленому затримкою шару. Всі етапи на конвеєрі реалізуються завжди в тому d 2 + d 2 - 2 h1h 2 - 2 æ d 2 - h 2 ö æ d2 - h 2 ö cos(a1 - a 2 ) самому порядку: один за іншим. Це, зокрема, ç 1 1 2 1 ÷ç 2 2÷ è øè ø означає, що якщо перший щабель конвеєра . виконав свою роботу й передав результат Цей сигнал надходить крізь комутатор 5 на другому, то для виконання поточної операції він вхід блоку обчислення квадратного кореня 9, з більше не знадобиться, і, отже, може приступити виходу якого сигнал до виконання на наступному етапі конвеєра. У блоці множення 7 відбуваєтеся множення розряду d 2 + d 2 - 2 h1h 2 - 2 æ d 2 - h 2 ö æ d2 - h 2 ö cos(a1 - a 2 ) ç 1 множника на розряд множеного. У результаті 1 2 1 ÷ç 2 2÷ è øè ø множення виходить добуток і перенос. Добуток , що пропорційний відстані між першим повітряним через комутатор відразу надходить до суматору 6, судном ПС1 і другим повітряним судном ПС2, а перенос враховується у наступному розряді. надходить до комутатору 5 і після цього поступає Блок обчислення косинусу 8 являє собою на індикатор відображення повітряної ситуації 10. пристрій для тригонометричного перетворення, що Блок перетворення коду 4 являє собою групу з містить послідовно з'єднаний амплітудний ЧИ елементів. Двійкове представлення детектор, суматор вихід якого підключений до записується у формі порозрядного доповнення до джерела опорної напруги, а також 1 (скрізь «1» змінюється на «0» та «0» на «1») та тригонометричний перетворювач, що працює в операнди поступають до комутатора 5. діапазоні аргументу 0
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for determining the distance between aircrafts in two-rail code
Автори англійськоюZhukov Ihor Anatoliiovych, Synelnikov Oleksii Oleksiiovych, Paschenko Nataliia Viktorivna
Назва патенту російськоюУстройство для определения расстояния между самолетами в парафазном коде
Автори російськоюЖуков Игорь Анатольевич, Синельников Алексей Алексеевич, Пащенко Наталия Викторовна
МПК / Мітки
МПК: G06F 15/16
Мітки: пристрій, обчислення, відстані, літаками, коді, парафазному
Код посилання
<a href="https://ua.patents.su/4-27574-pristrijj-obchislennya-vidstani-mizh-litakami-u-parafaznomu-kodi.html" target="_blank" rel="follow" title="База патентів України">Пристрій обчислення відстані між літаками у парафазному коді</a>
Пристрій для додавання у парафазному коді
Номер патенту: 27510
Опубліковано: 12.11.2007
Автори: Синельников Олексій Олексійович, Жуков Ігор Анатолійович, Пащенко Наталія Вікторівна, Гуменюк Віталій Олександрович
МПК: G06F 7/50
Мітки: додавання, пристрій, парафазному, коді
Формула / Реферат:
Пристрій для додавання у парафазному коді, який містить блок регістра результату, блок матриці корекції переносу, блок матриці додавання, блок комутації і блок перетворення, причому входи блока матриці додавання з'єднані з вхідними шинами першого і другого операндів суматора, а перша група виходів блока матриці додавання з'єднана з вхідними шинами суми блока регістра результату, який відрізняється тим, що друга група через блок матриці...
Суматор у парафазному коді

Номер патенту: 18621
Опубліковано: 15.11.2006
Автори: Жуков Ігор Анатолійович, Гуменюк Віталій Олександрович, Синельников Олексій Олексійович
МПК: G06F 7/50
Мітки: коді, суматор, парафазному
Формула / Реферат:
Суматор у парафазному коді, який містить блок регістра результату, блок матриці корекції переносу, блок матриці додавання і блок комутації, причому входи блока матриці додавання з’єднані з вхідними шинами першого і другого операндів суматора, а перша група виходів блока матриці додавання з’єднана з вхідними шинами суми блока регістра результату, який відрізняється тим, що друга група виходів блока матриці додавання через блок матриці корекції...
Пристрій для обчислення показникової функції
Номер патенту: 3471
Опубліковано: 15.11.2004
Автори: Баранов Георгій Леонідович, Мартинова Оксана Петрівна, Баранов Володимир Леонідович, Жуков Ігор Анатолійович
МПК: G06F 17/10, G06F 7/544
Мітки: функції, показникової, обчислення, пристрій
Формула / Реферат:
1. Пристрій для обчислення показникової функції, який містить три регістри і блок завдання констант, причому інформаційні входи пристрою з'єднані з інформаційними входами першого регістра, виходи другого регістра з'єднані з інформаційними входами третього регістра, керуючі входи пристрою з'єднані з адресними входами блока завдання констант, який відрізняється тим, що в нього додатково введені два комутатори, блок множення, елемент АБО і блок...
Пристрій для обчислення сигмоїдальної функції
Номер патенту: 75455
Опубліковано: 17.04.2006
Автори: Жуков Ігор Анатолійович, Кременецький Георгій Миколайович, Баранов Володимир Леонідович, Баранов Георгій Леонідович
МПК: G06F 17/10, G06F 7/544
Мітки: пристрій, обчислення, сигмоїдальної, функції
Формула / Реферат:
1. Пристрій для обчислення сигмоїдальної функції, який містить три регістри і блок множення, причому інформаційні входи пристрою з'єднані з інформаційними входами першого регістра, а виходи блока множення з'єднані з інформаційними входами другого регістра, який відрізняється тим, що в нього додатково введені три комутатори, перетворювач кодів і блок керування, перший вихід якого з'єднаний з установочними входами першого, другого і третього...
Пристрій для обчислення показникової функції
Номер патенту: 76203
Опубліковано: 17.07.2006
Автори: Баранов Георгій Леонідович, Мартинова Оксана Петрівна, Баранов Володимир Леонідович, Жуков Ігор Анатолійович
МПК: G06F 7/544, G06F 17/10
Мітки: пристрій, показникової, функції, обчислення
Формула / Реферат:
1. Пристрій для обчислення показникової функції, який містить три регістри і блок завдання констант, причому інформаційні входи пристрою з'єднані з інформаційними входами першого регістра, виходи другого регістра з'єднані з інформаційними входами третього регістра, керуючі входи пристрою з'єднані з адресними входами блока завдання констант, який відрізняється тим, що в нього додатково введені два комутатори, блок множення, елемент АБО і блок...
Попередній патент: Комбікорм для кролів
Наступний патент: Пристрій для прогнозу викидонебезпеки вугільних пластів
Випадковий патент: Ендопротез тіла позвонка