Будівельний підйомник

Формула / Реферат
Будівельний підйомник, який має щоглу, каретку з приводом її переміщення вздовж щогли, вантажну платформу, установлену на каретці з можливістю її переміщення поперек щогли, який відрізняється тим, що на каретці установлені на одній геометричній осі блок каната підйому каретки іфрикційний барабан, охоплений канатом приводу горизонтального переміщення платформи, кінці якого закріплені на кронштейнах, розміщених на краях платформи, а між валами блока і фрикційного барабана установлена керована зчіпна муфта.
Текст
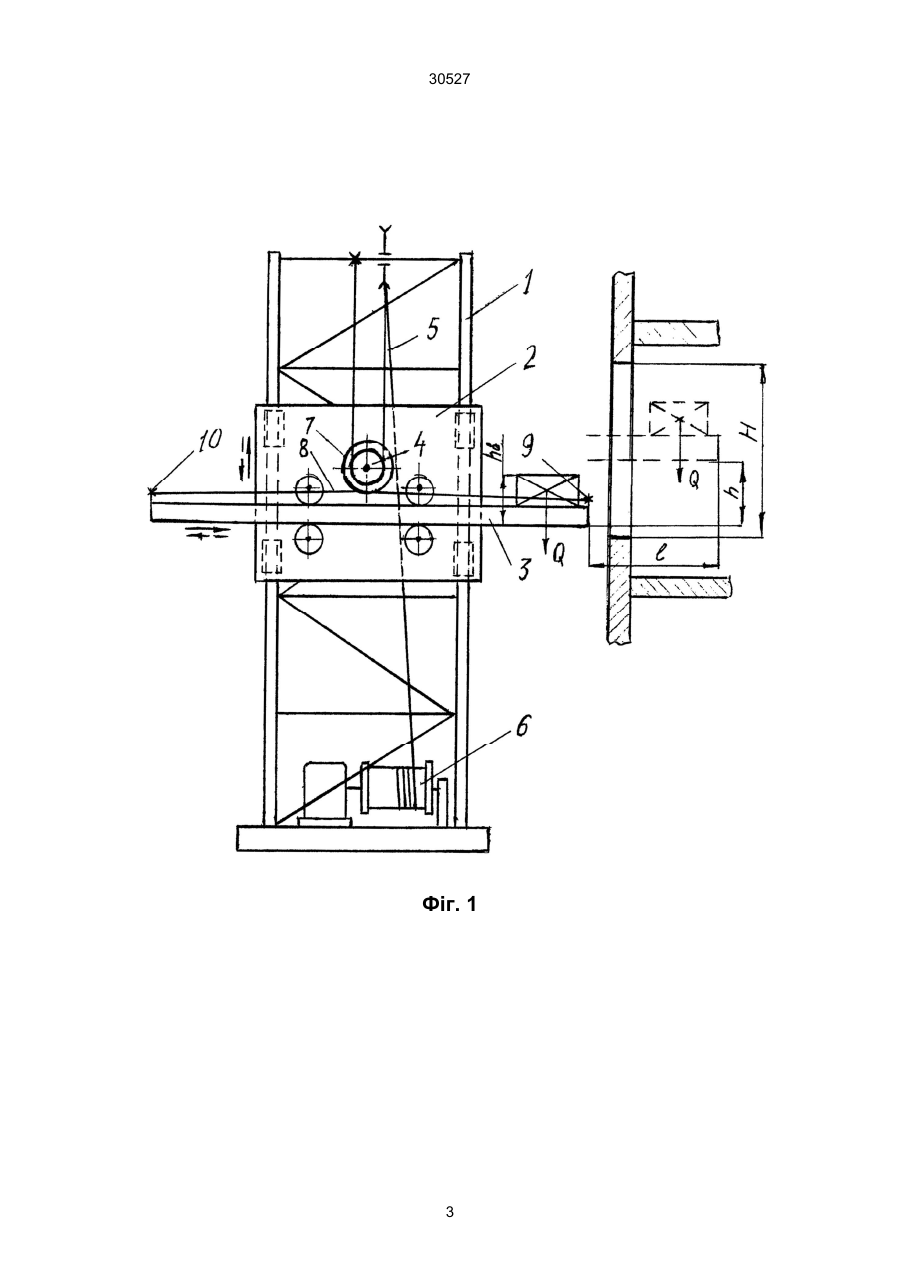
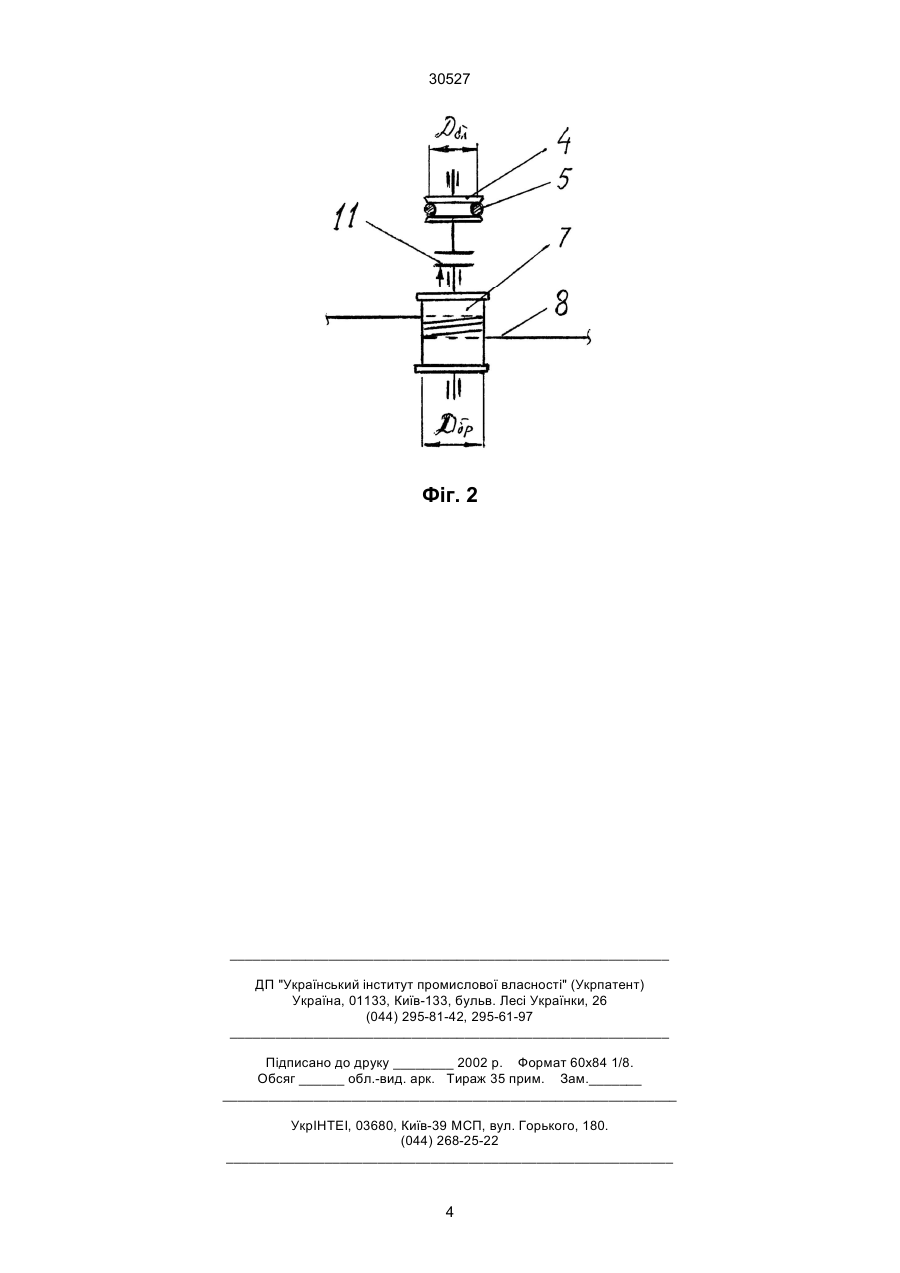
Будівельний підйомник, який має щоглу, каретку з приводом її переміщення вздовж щогли, ван 30527 валами блока і фрикційного барабана установлена керована зчіпна муфта. На фіг. 1 показаний загальний вигляд підйомника і граничне положення висувної платформи у прорізу будинку, а на фіг. 2 наведена кінематична схема установленого на каретці привода горизонтального переміщення вантажної платформи. Підйомник складається із щогли 1, каретки 2, вантажної платформи 3. На каретці установлений на валу блок 4, який огинається канатом 5 підйому каретки. Один кінець цього каната огинає вершину щогли і закріплюється на барабані 6 лебідки привода підйомника, установленої біля основи щогли. Другий кінець каната 5, огинаючи блок 4, утворює двократний поліспаст і закріплюється на вершині щогли. На одній геометричній осі з блоком 4 на каретці установлений фрикційний барабан 7, який охоплений тяговим канатом 8, кінці цього каната з'єднані з кронштейнами 9 і 10, розміщеними на протилежних краях вантажної платформи 3. Між валами блока 4 і барабана 7 установлена керована зчіпна муфта 11 (фіг. 2). Підйомник працює у такій послідовності. Після підйому каретки на необхідну висоту включається зчіпна муфта 11, яка з'єднує вали канатного блока 4 і фрикційного барабана 7. Обертовий рух блока 4, викликаний дією тягового зусилля у канаті 5, передається через муфту 11 фрикційному барабану 7. При обертанні барабана навпроти годинникової стрілки ліва вітка тягового каната 8 буде намотуватись, а права змотуватись з нього (див. фіг. 1). При такому обертанні під дією тягового зусилля у канаті 8 вантажна платформа 3 буде пересуватися вправо у проріз будинку чи іншої споруди. Після розвантаження платформи лебідка підйомника включається на спуск. При цьому відбувається зворотне обертання фрикційного барабана 7 і вантажна платформа буде рухатись вліво. Після виходу платформи за контур будинку зчіпна муфта 11 розмикається, каретка опускається до низу і у подальшому цикл роботи підйомника може знову повторюватись. Управління зчіпною муфтою 11 може бути ручним і здійснюватись за допомогою обслуговуючого робітника з кожної площадки прийому вантажу. У разі застосування муфти 11 з електромагнітним приводом підйомник може працювати у автоматичному режимі з дистанційним управлінням, яке буде здійснюватись одним оператором із загального пульта управління. Рух висувної платформи у прямому і зворотному напрямках відбувається при одночасному підйомі або опусканні каретки підйомника. Це накладає деякі габаритні обмеження на мінімальний розмір H прорізу будинку чи споруди і на максимальну висоту вантажу hв. Враховуючи двократний поліспаст привода каретки висота її підйому h за час переміщення вантажної платформи на відстань ℓ буде визначатись за формулою h= l Dбл × , 2 Dбр (1) де Dбл і Dбр – відповідно, діаметри канатного блока 4 і фрикційного барабана 7 (див. фіг. 2). Формула показує, що для зменшення висоти h при заданому ℓ необхідно, щоб діаметр блока був менший ніж діаметр барабана, тобто Dблhв+h. (2) Формули (1) і (2) дозволяють розрахувати граничну висоту вантажу hв і безпечну траєкторію його транспортування при заданому вертикальному розмірі Н прорізу споруди. Порівнюючи запропонований винахід із прототипом можна відмітити, що запропонована конструкція є більш простою. Вона має меншу кількість канатних блоків, зі спрощеною схемою заведення каната. Відсутність наявної у прототипі відтяжки щогли зменшує габаритні розміри підйомника у горизонтальному напрямку і робить більш зручним для користування робочий майданчик біля основи щогли. У порівнянні з прототипом запропонована конструкція має спрощену схему управління. Управління може бути ручним і здійснюватися з кожної площадки прийому вантажів, а також автоматичним - із загального пульта управління підйомником. 2 30527 Фіг. 1 3 30527 Фіг. 2 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2002 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 35 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 4
ДивитисяДодаткова інформація
Назва патенту англійськоюConstruction elevator
Автори англійськоюKoval Vitalii Ivanovych
Назва патенту російськоюСтроительный подъемник
Автори російськоюКоваль Виталий Иванович
МПК / Мітки
МПК: B66B 9/16
Мітки: підйомник, будівельний
Код посилання
<a href="https://ua.patents.su/4-30527-budivelnijj-pidjjomnik.html" target="_blank" rel="follow" title="База патентів України">Будівельний підйомник</a>
Газліфтний підйомник

Номер патенту: 9886
Опубліковано: 30.09.1996
Автори: Рилов Борис Михайлович, Патрай Володимир Петрович, Ніколаєнко Микола Андрійович, Цвик Богдан Миколайович, Бульбас Валерій Миколайович
МПК: F04F 1/20
Мітки: газліфтній, підйомник
Формула / Реферат:
(57) Газліфтний підйомник, що містить в експлуатаційній колоні підіймальну трубу спусковими клапанами і розміщеною під ними робочою муфтою з зосередженими в ній робочими отворами і газопідвід, який відрізняється тим, що в підіймальній трубі виконані додаткові робочі отвори, розосереджені по всій її довжині в інтервалі пускових клапанів і нижче їх.
Підйомник для автомобілів
Номер патенту: 20300
Опубліковано: 15.07.1997
Автор: Чевердинський Юрій Олексійович
Мітки: підйомник, автомобілів
Формула / Реферат:
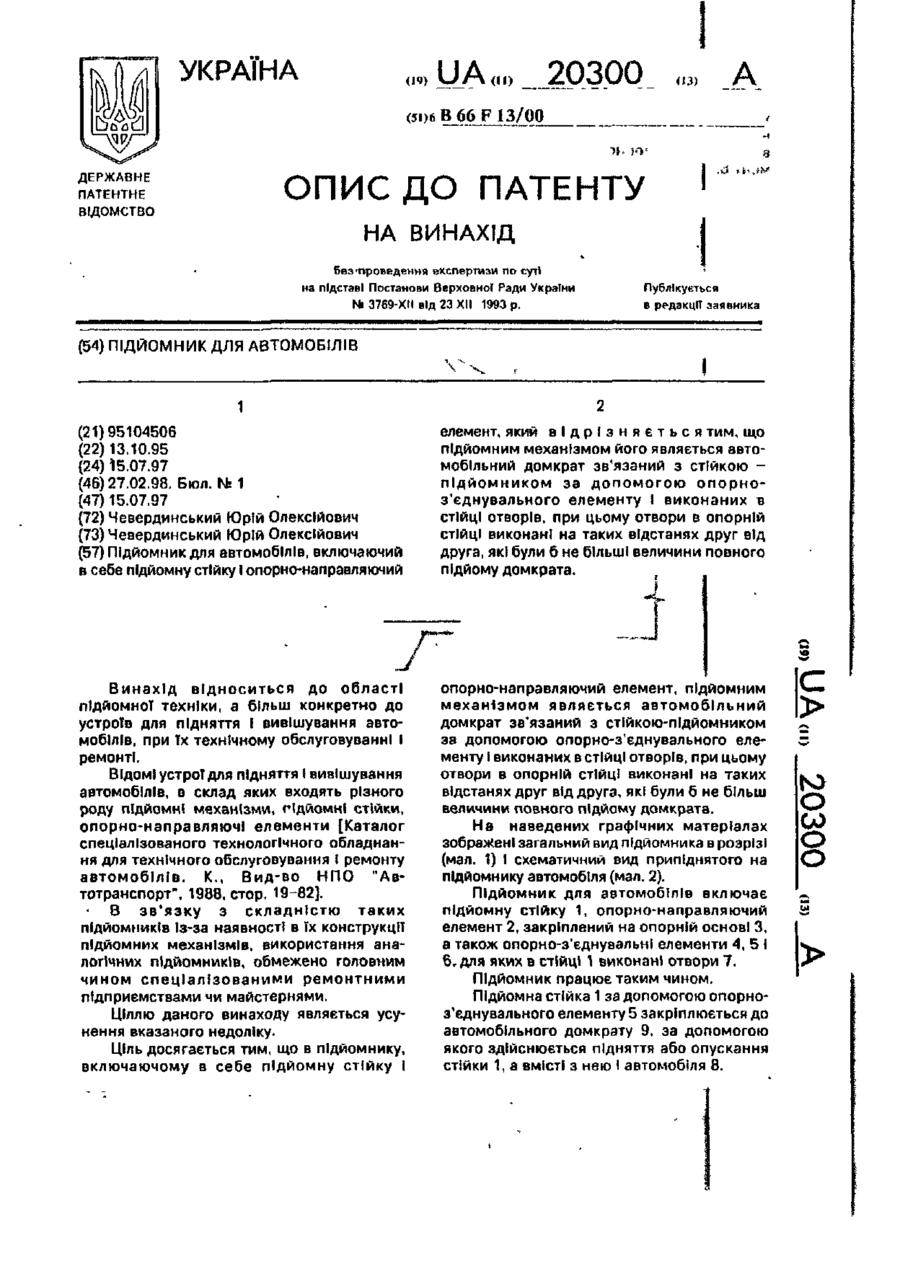
Підйомник для автомобілів, включаючий в себе підйомну стійку і опорно-направляючий елемент, який відрізняється тим, що підйомним механізмом його являється автомобільний домкрат зв'язаний з стійкою-підйомником за допомогою опорно-з'єднувального елементу і виконаних в стійці отворів, при цьому отвори в опорній стійці виконані на таких відстанях друг від друга, які були б не більші величини повного підйому домкрата.
Кроковий підйомник
Номер патенту: 4345
Опубліковано: 27.12.1994
Автори: Тюшка Михайло Михайлович, Ситник Микола Петрович, Іванов Іван Васильович
МПК: B66F 1/00
Формула / Реферат:
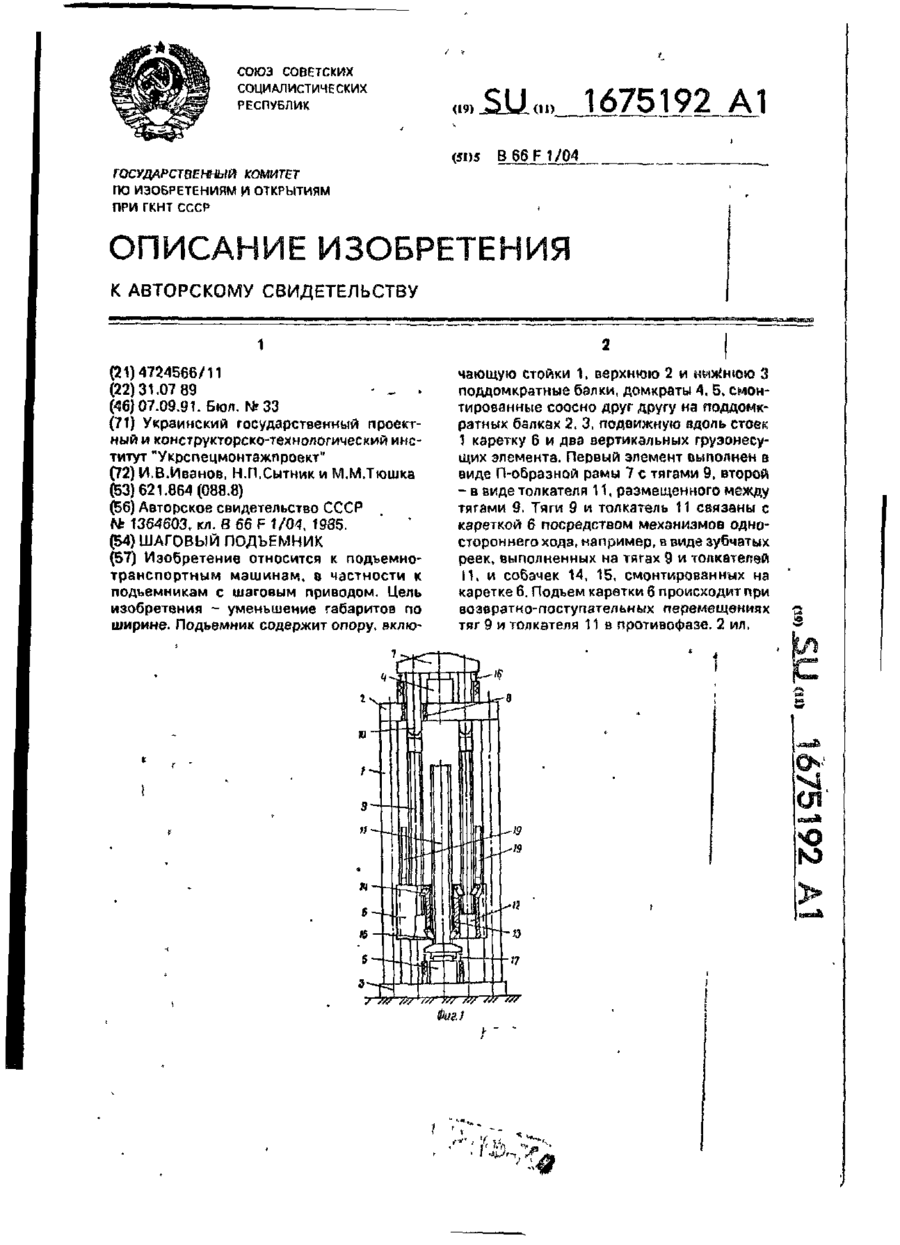
Шаговый подъемник, содержащий опору со стойками и связанной с их верхними концами поддомкратной балкой, домкраты, один из которых размещен на указанной поддомкратной балке, имеющие упоры вертикальные грузоподъемные элементы, два из которых соединены в верхней части поперечиной, связанной с одним из домкратов, и грузонесущую каретку с механизмами фиксации одностороннего действия для соединения их подвижных органов с упорами вертикальных...
Підйомник для транспортного засобу
Номер патенту: 9870
Опубліковано: 30.09.1996
Автори: Лінецький Анатолій Гершович, Маліборський Василь Сергійович, Тихоход Олександр Олександрович, Штихлайтнер Йосиф Коломанович
Мітки: засобу, транспортного, підйомник
Формула / Реферат:
(57) Подъемник для транспортного средства, содержащий стойки с вертикальными направляющими, в которых установлены грузоподъемные каретки с площадками для транспортного средства, механизмы вертикального перемещения упомянутых кареток, каждый из которых включает в себя размещенный вдоль соответствующей стойки связанный с электроприводом винт с грузовой и страховочной гайками, с которыми соединена каретка этой стойки, и устройство управления...
Підйомник
Номер патенту: 15156
Опубліковано: 30.06.1997
Автори: Вакуленко Борис Іванович, Петренко Віктор Данилович, Луценко Федір Олександрович, Ситник Микола Петрович, Іванов Іван Васильович
МПК: B66F 3/00, B66F 11/00
Мітки: підйомник
Формула / Реферат:
1. Подъемник, содержащий основание, на котором установлена внешняя неподвижная секция башни с направляющими, размещенные в неподвижной секции и соединенные между собой выдвижные секции башни, которые, по меньшей мере, кроме нижней выполнены с размещенными в их верхней части упорами и с элементами для фиксации друге другом, и нижней выдвижной секцией, смонтированный на верхней выдвижной секции оголовок с грузовой площадкой, фиксаторы для...
Попередній патент: Спосіб одержання витяжки прополісу “м’яка”
Наступний патент: Очисник головок коренеплодів
Випадковий патент: Спосіб лікування тромбозів та тромбоемболій