Спосіб визначення гладкої статичної нелінійності з динаміки об`єкта контролю
Номер патенту: 30530
Опубліковано: 25.02.2008
Автори: Лисиця Павло Михайлович, Сільвестров Антон Миколайович, Галай Петро Миколайович
Формула / Реферат
Спосіб визначення гладкої статичної нелінійності з динаміки об'єкта контролю, згідно з яким на вхід об'єкта, що контролюється, подають тестуючий вплив і реєструють вихідну змінну об'єкта, який відрізняється тим, що вихідну змінну об'єкта пропускають через компенсатор динаміки об'єкта, де структуру і параметри компенсатора визначають за умови заданого рівня гладкості залежності "вхід - скомпенсований вихід" об'єкта.
Текст
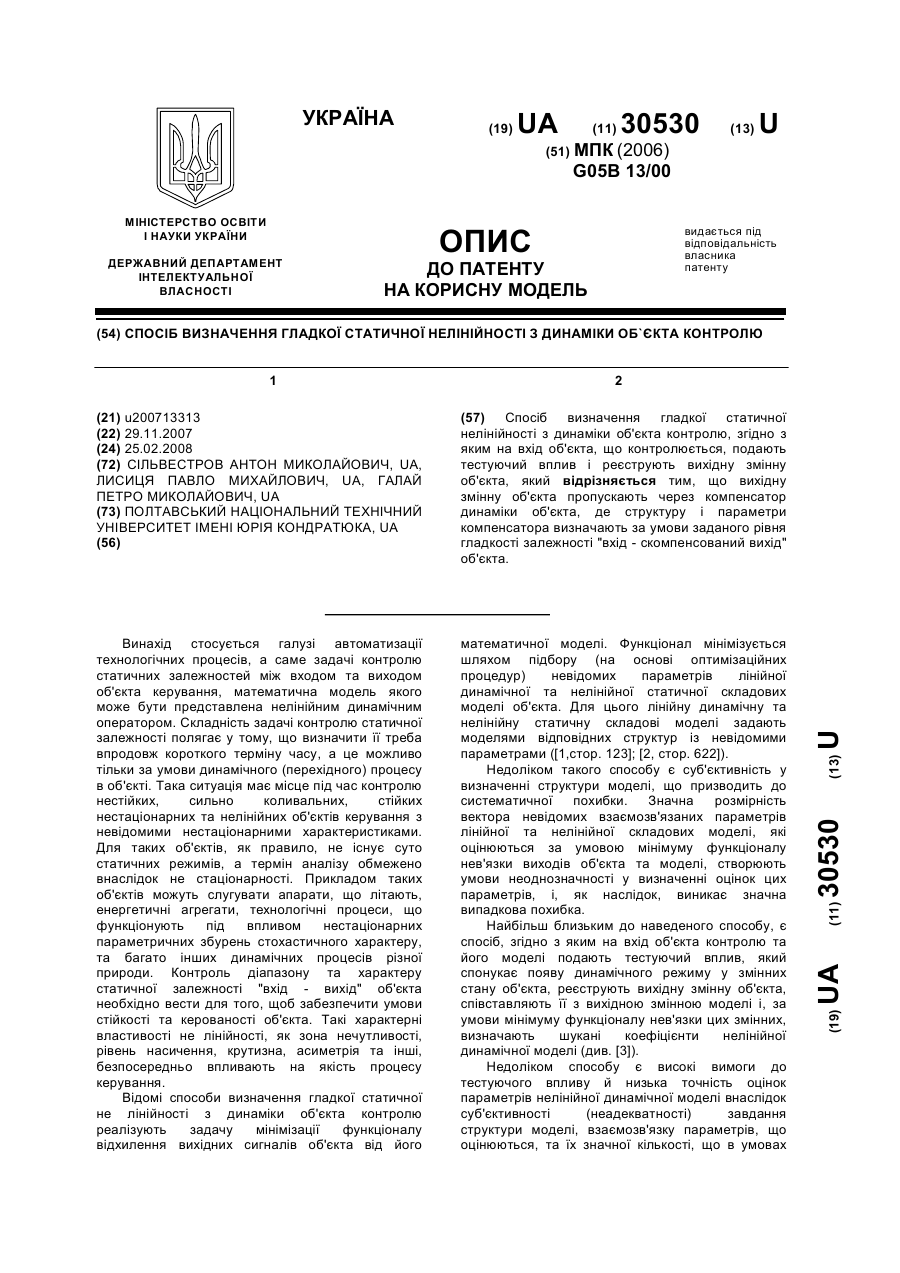
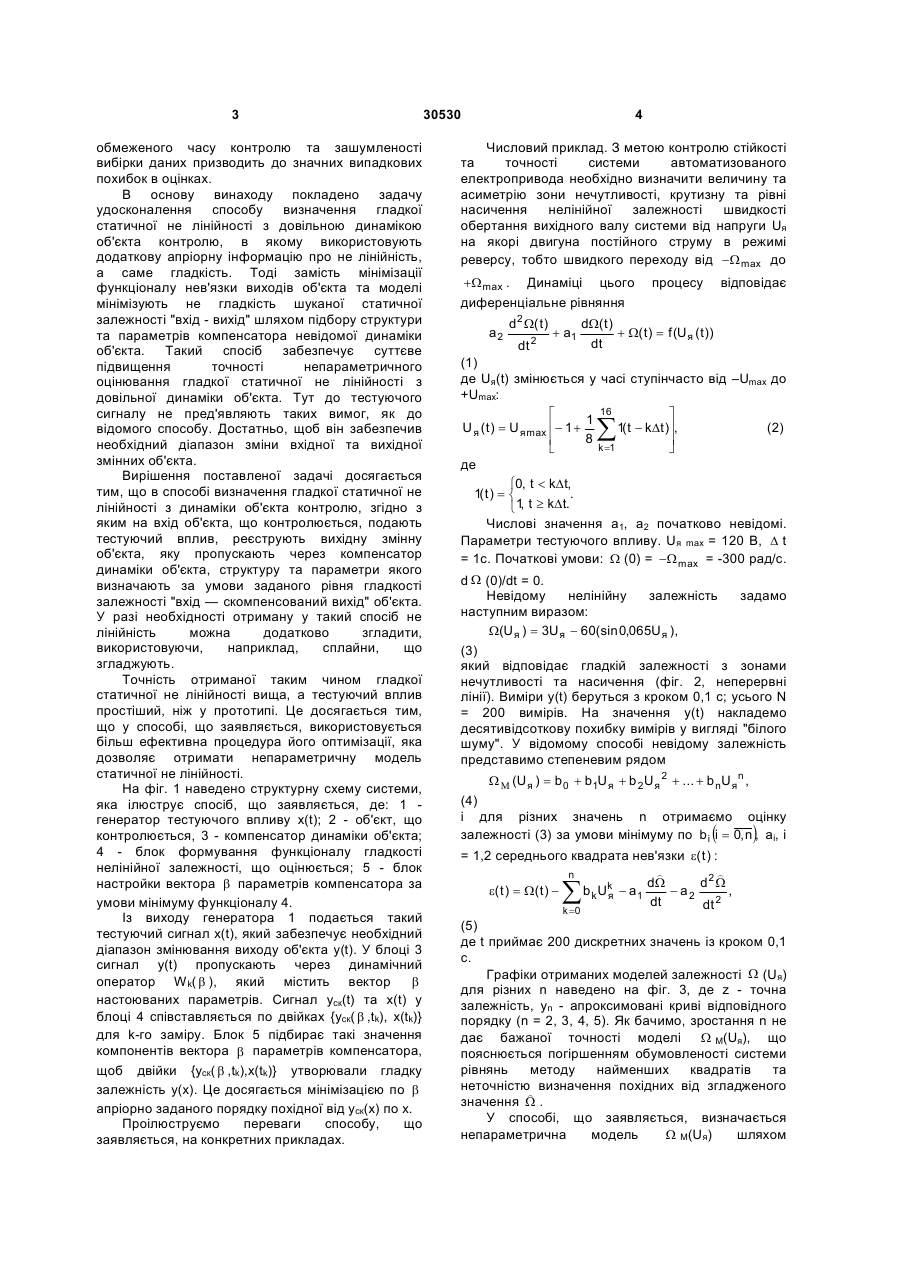
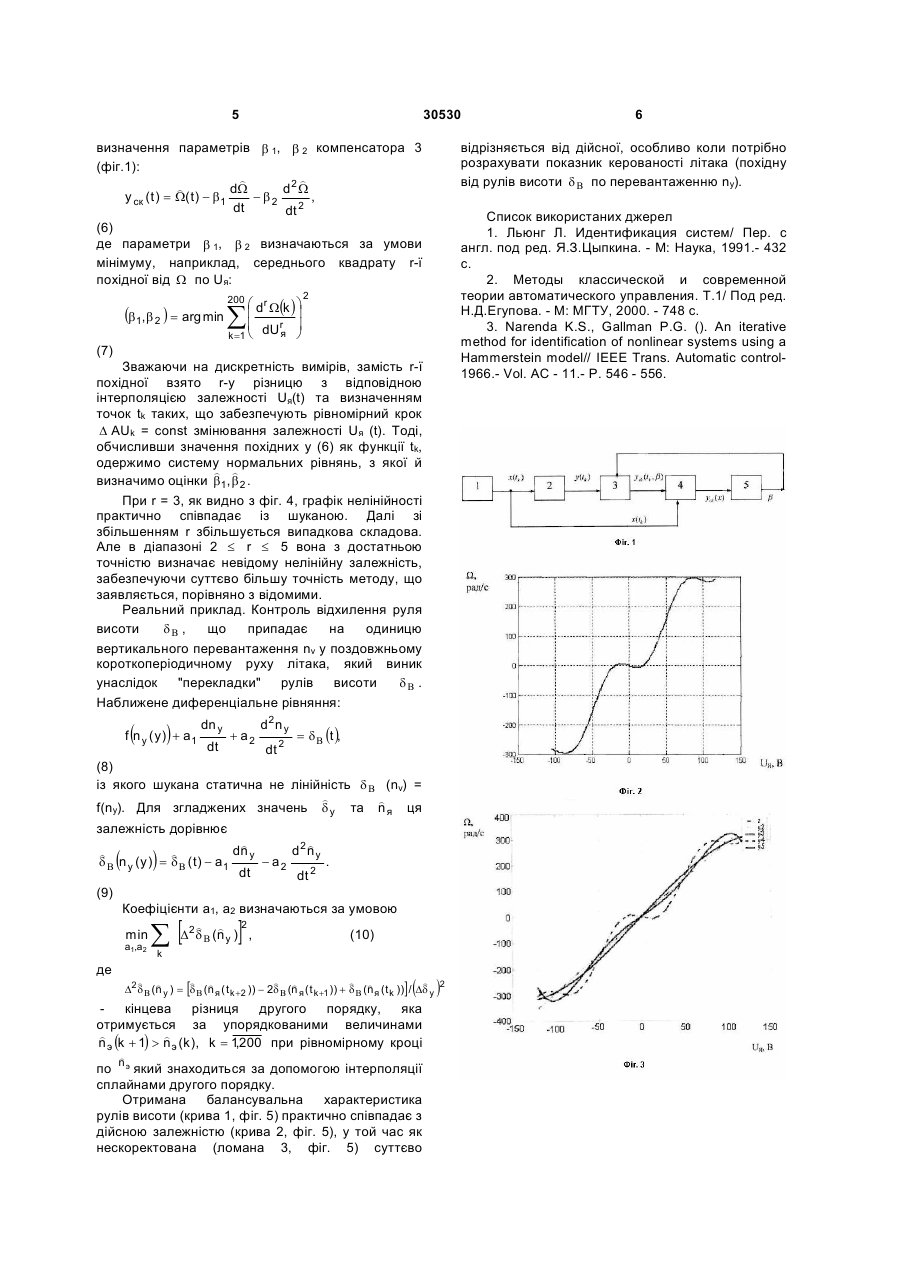
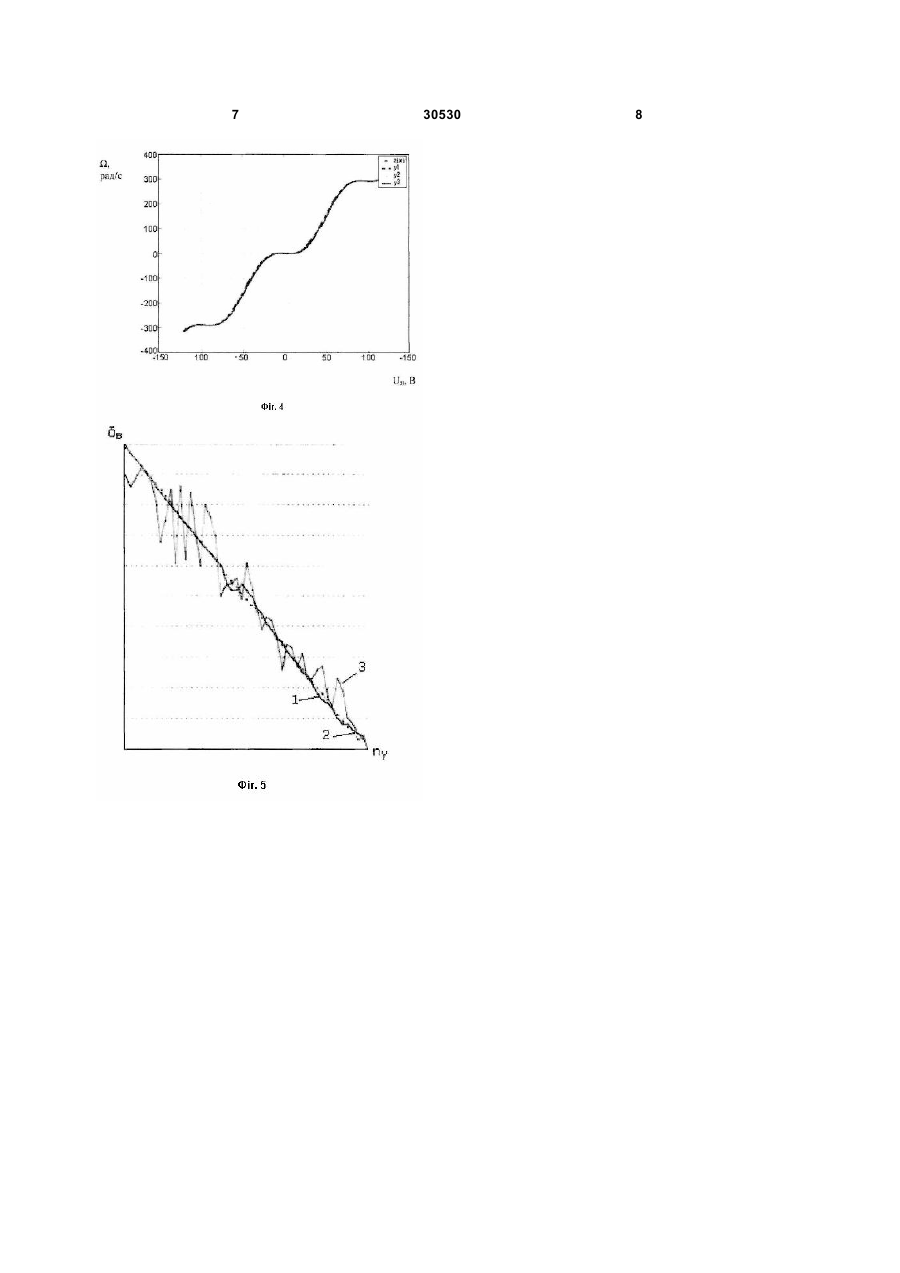
Спосіб визначення гладкої статичної нелінійності з динаміки об'єкта контролю, згідно з яким на вхід об'єкта, що контролюється, подають тестуючий вплив і реєструють вихідну змінну об'єкта, який відрізняється тим, що вихідну змінну об'єкта пропускають через компенсатор динаміки об'єкта, де структуру і параметри компенсатора визначають за умови заданого рівня гладкості залежності "вхід - скомпенсований вихід" об'єкта. (19) (21) u200713313 (22) 29.11.2007 (24) 25.02.2008 (72) СІЛЬВЕСТРОВ АНТОН МИКОЛАЙОВИЧ, UA, ЛИСИЦЯ ПАВЛО МИХАЙЛОВИЧ, UA, ГАЛАЙ ПЕТРО МИКОЛАЙОВИЧ, UA (73) ПОЛТАВСЬКИЙ НАЦІОНАЛЬНИЙ ТЕХНІЧНИЙ УНІВЕРСИТЕТ ІМЕНІ ЮРІЯ КОНДРАТЮКА, UA (56) 3 обмеженого часу контролю та зашумленості вибірки даних призводить до значних випадкових похибок в оцінках. В основу винаходу покладено задачу удосконалення способу визначення гладкої статичної не лінійності з довільною динамікою об'єкта контролю, в якому використовують додаткову апріорну інформацію про не лінійність, а саме гладкість. Тоді замість мінімізації функціоналу нев'язки виходів об'єкта та моделі мінімізують не гладкість шуканої статичної залежності "вхід - вихід" шляхом підбору структури та параметрів компенсатора невідомої динаміки об'єкта. Такий спосіб забезпечує суттєве підвищення точності непараметричного оцінювання гладкої статичної не лінійності з довільної динаміки об'єкта. Тут до тестуючого сигналу не пред'являють таких вимог, як до відомого способу. Достатньо, щоб він забезпечив необхідний діапазон зміни вхідної та вихідної змінних об'єкта. Вирішення поставленої задачі досягається тим, що в способі визначення гладкої статичної не лінійності з динаміки об'єкта контролю, згідно з яким на вхід об'єкта, що контролюється, подають тестуючий вплив, реєструють вихідну змінну об'єкта, яку пропускають через компенсатор динаміки об'єкта, структуру та параметри якого визначають за умови заданого рівня гладкості залежності "вхід — скомпенсований вихід" об'єкта. У разі необхідності отриману у такий спосіб не лінійність можна додатково згладити, використовуючи, наприклад, сплайни, що згладжують. Точність отриманої таким чином гладкої статичної не лінійності вища, а тестуючий вплив простіший, ніж у прототипі. Це досягається тим, що у способі, що заявляється, використовується більш ефективна процедура його оптимізації, яка дозволяє отримати непараметричну модель статичної не лінійності. На фіг. 1 наведено структурну схему системи, яка ілюструє спосіб, що заявляється, де: 1 генератор тестуючого впливу x(t); 2 - об'єкт, що контролюється, 3 - компенсатор динаміки об'єкта; 4 - блок формування функціоналу гладкості нелінійної залежності, що оцінюється; 5 - блок настройки вектора b параметрів компенсатора за умови мінімуму функціоналу 4. Із виходу генератора 1 подається такий тестуючий сигнал x(t), який забезпечує необхідний діапазон змінювання виходу об'єкта y(t). У блоці 3 сигнал y(t) пропускають через динамічний оператор W k( b ), який містить вектор b настоюваних параметрів. Сигнал yск(t) та x(t) у блоці 4 співставляється по двійках {yск( b ,tk), x(tk)} для k-го заміру. Блок 5 підбирає такі значення компонентів вектора b параметрів компенсатора, щоб двійки {yск( b ,tk),x(tk)} утворювали гладку залежність у(х). Це досягається мінімізацією по b апріорно заданого порядку похідної від уск(х) по х. Проілюструємо переваги способу, що заявляється, на конкретних прикладах. 30530 4 Числовий приклад. З метою контролю стійкості та точності системи автоматизованого електропривода необхідно визначити величину та асиметрію зони нечутливості, крутизну та рівні насичення нелінійної залежності швидкості обертання вихідного валу системи від напруги Uя на якорі двигуна постійного струму в режимі реверсу, тобто швидкого переходу від -W max до + Wmax . Динаміці цього диференціальне рівняння a2 d 2 W( t ) 2 + a1 процесу відповідає dW( t ) + W( t ) = f (U я ( t )) dt dt (1) де Uя(t) змінюється у часі ступінчасто від –Umах до +Umах: 16 é ù 1 (2) U я ( t ) = U я max ê- 1 + 1( t - kDt )ú, 8 ê ú k =1 ë û де ì0, t n э (k ), k= 1200 при рівномірному кроці , ) по n э який знаходиться за допомогою інтерполяції сплайнами другого порядку. Отримана балансувальна характеристика рулів висоти (крива 1, фіг. 5) практично співпадає з дійсною залежністю (крива 2, фіг. 5), у той час як нескоректована (ломана 3, фіг. 5) суттєво 6 відрізняється від дійсної, особливо коли потрібно розрахувати показник керованості літака (похідну від рулів висоти d B по перевантаженню nу). Список використаних джерел 1. Льюнг Л. Идентификация систем/ Пер. с англ. под ред. Я.З.Цыпкина. - М: Наука, 1991.- 432 с. 2. Методы классической и современной теории автоматического управления. Т.1/ Под ред. Н.Д.Егупова. - М: МГТУ, 2000. - 748 с. 3. Narenda K.S., Gallman P.G. (). An iterative method for identification of nonlinear systems using a Hammerstein model// IEEE Trans. Automatic control1966.- Vol. AC - 11.- P. 546 - 556. 7 30530 8
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determination of smooth static non-linearity from dynamics of object of control
Автори англійськоюSilvestrov Anton Mykolaiovych, Lysytsia Pavlo Mykhailovych, Halai Petro Mykolaiovych
Назва патенту російськоюСпособ определения гладкой статической нелинейности из динамики объекта контроля
Автори російськоюСильвестров Антон Николаевич, Лисица Павел Михайлович, Галай Петр Николаевич
МПК / Мітки
МПК: G05B 13/00
Мітки: нелінійності, визначення, спосіб, об'єкта, статичної, гладкої, контролю, динаміки
Код посилання
<a href="https://ua.patents.su/4-30530-sposib-viznachennya-gladko-statichno-nelinijjnosti-z-dinamiki-obehkta-kontrolyu.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення гладкої статичної нелінійності з динаміки об`єкта контролю</a>
Спосіб нейтралізації статичної електрики об’єкта
Номер патенту: 32893
Опубліковано: 15.02.2001
Автор: Ігнатов Сергій Олександрович
Мітки: спосіб, електрики, статичної, об'єкта, нейтралізації
Текст:
...і негативний вплив на шкіру людини. В основу даного винаходу поставлене завдання у відомому с пособі ней траліза ції с та ти чної е лек трики шляхом зм іни технологічних операцій отримати новий технічний результат, що виражається в підвищенні ефективності і забезпеченні високої гігієнічності. -3 Поставлене завдання вирішується наступним чином. У відомому способі нейтралізації статичної електрики об'єкта, згідно з запропонованим...
Спосіб визначення показника статичної міцності алмазних шліфпорошків з попередньо встановленою зернистістю
Номер патенту: 3399
Опубліковано: 15.11.2004
Автори: Нікітін Юрій Іванович, Петасюк Григорій Андрійович, Новіков Микола Васильович
МПК: G01N 19/00
Мітки: спосіб, показника, шліфпорошків, попередньо, встановленою, міцності, статичної, визначення, зернистістю, алмазних
Формула / Реферат:
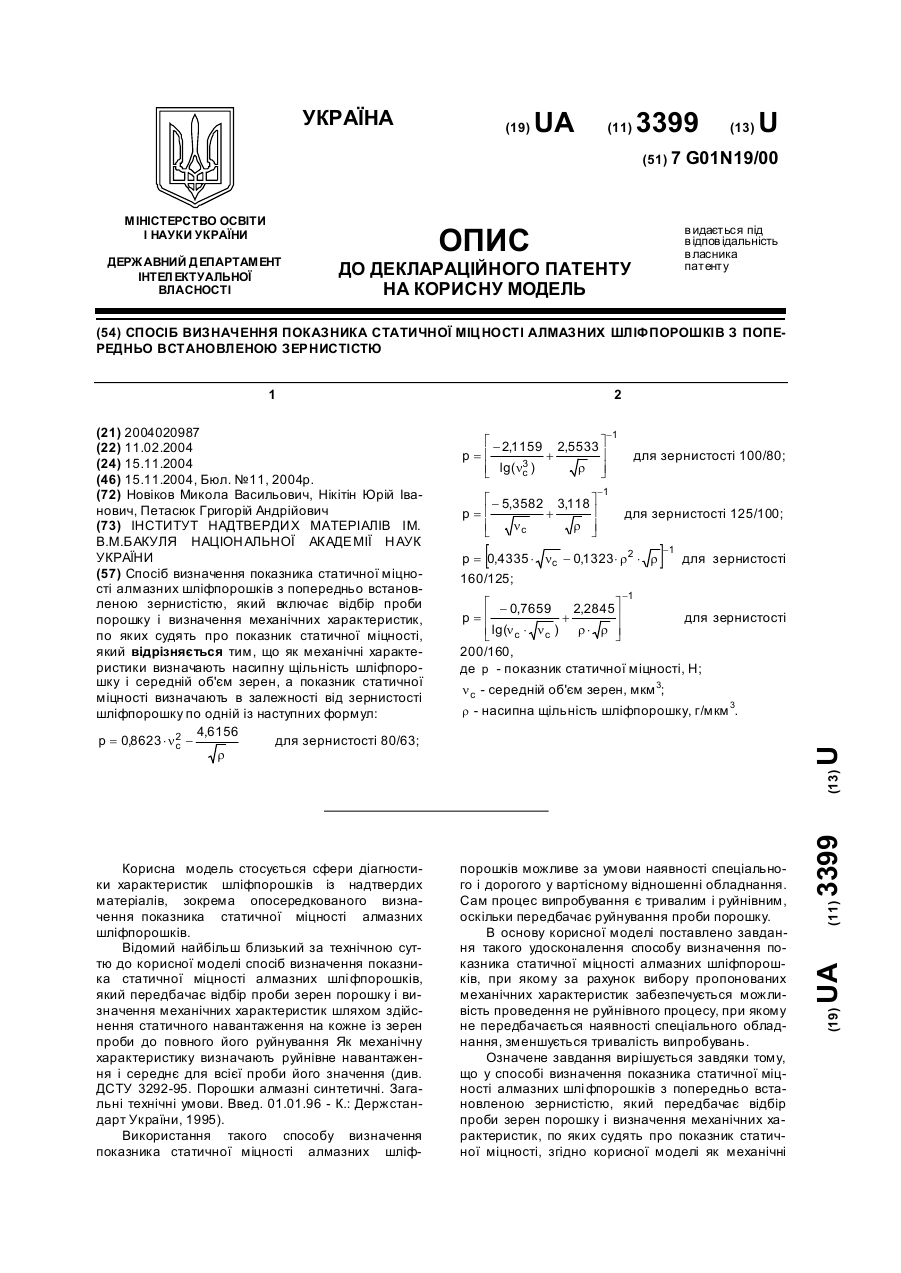
Спосіб визначення показника статичної міцності алмазних шліфпорошків з попередньо встановленою зернистістю, який включає відбір проби порошку і визначення механічних характеристик, по яких судять про показник статичної міцності, який відрізняється тим, що як механічні характеристики визначають насипну щільність шліфпорошку і середній об'єм зерен, а показник статичної міцності визначають в залежності від зернистості шліфпорошку по одній із...
Стенд для визначення поперечної статичної стійкості транспортного засобу
Номер патенту: 26276
Опубліковано: 10.09.2007
Автори: Бондарєв Євгеній Ілліч, Митрофанов Олександр Петрович, Лілевман Ігор Йосипович
МПК: G01P 1/00
Мітки: транспортного, стенд, поперечної, засобу, статичної, стійкості, визначення
Формула / Реферат:
1. Стенд для визначення поперечної статичної стійкості транспортного засобу, що складається з вантажної платформи, встановленої на опорах, насосної станції, яка через гідролінії з'єднана з гідроциліндрами, що нахиляють платформу, на якій встановлено транспортний засіб, до якого прикріплено страхувальні ланцюги, та упори і кутомір, що встановлені на платформі, який відрізняється тим, що у вантажній платформі, під переднім і заднім колесами...
Спосіб визначення динаміки функціонального стану макулярної ділянки сітківки при дистрофічних процесах
Номер патенту: 54864
Опубліковано: 17.03.2003
Автор: Іваницька Олена В'ячеславівна
МПК: A61B 8/10, A61P 27/00
Мітки: динаміки, процесах, дистрофічних, стану, ділянки, функціонального, макулярної, спосіб, сітківки, визначення
Формула / Реферат:
Спосіб визначення динаміки функціонального стану макулярної ділянки сітківки при дистрофічних процесах шляхом дослідження гостроти зору, який відрізняється тим, що вимірюють фотострес-тест (час відновлення зору) для близької відстані після дії дозованого світла протягом 30 секунд, аналізують динаміку показника фотострес-тесту як суми константи, що дорівнює 100 відсоткам, та відсоткового співвідношення різниці часу наступного і попереднього...
Прилад для визначення динаміки процесу тужавіння тампонажної суміші
Номер патенту: 45226
Опубліковано: 15.03.2002
Автор: Вівчар Василь Іванович
МПК: E21B 33/138, G01N 11/04
Мітки: динаміки, тампонажної, тужавіння, суміші, прилад, визначення, процесу
Формула / Реферат:
Прилад для визначення динаміки процесу тужавіння тампонажної суміші, що містить корпус, кожух, кришку, шків на валу, котрий відрізняється тим, що він додатково містить циліндр, підшипник кочення, зубчату втулку з закріпленою на ній голкою Віка, який рухається по двох направляючих штоках, підшипник ковзання, виконаний з двох втулок - внутрішньої гвинтової, скріпленої з зовнішньою, на якій висить стакан, які забезпечують багаторазове нове місце...
Попередній патент: Спосіб виробництва керамзитового гравію
Наступний патент: Спосіб автоматичного регулювання кількості піскоуловлювачів при дискретній подачі стічних вод
Випадковий патент: Пристрій для ерозійно-вибухового диспергування металів