Пристрій фазового виявлення цілей
Номер патенту: 31013
Опубліковано: 25.03.2008
Автори: Шматков Сергій Ігорович, Челпанов Володимир Валентинович, Лазутський Анатолій Федорович
Формула / Реферат
Пристрій фазового виявлення цілей, що містить послідовно з'єднані блок попередньої обробки, блок фазовимірювача, блок обчислювання розкиду фаз та пороговий блок, який відрізняється тим, що додатково введені блок віднімання, послідовно з'єднані блок вимірювання дальності і блок формування імпульсів запуску та вузол цифрового корелятора у складі послідовно з'єднаних блока пам'яті, блока корелятора та блока аналізу, при цьому вхід блока вимірювання дальності з'єднаний з другим виходом блока попередньої обробки, а вихід блока формування імпульсів запуску з'єднаний з другим входом блока фазовимірювача, вхід блока віднімання з'єднаний з виходом блока фазовимірювача, а вихід - із входами блока обчислювання розкиду фаз та блока пам'яті, входом пристрою є вхід блока попередньої обробки, а виходами - виходи порогового блока та блока аналізу.
Текст
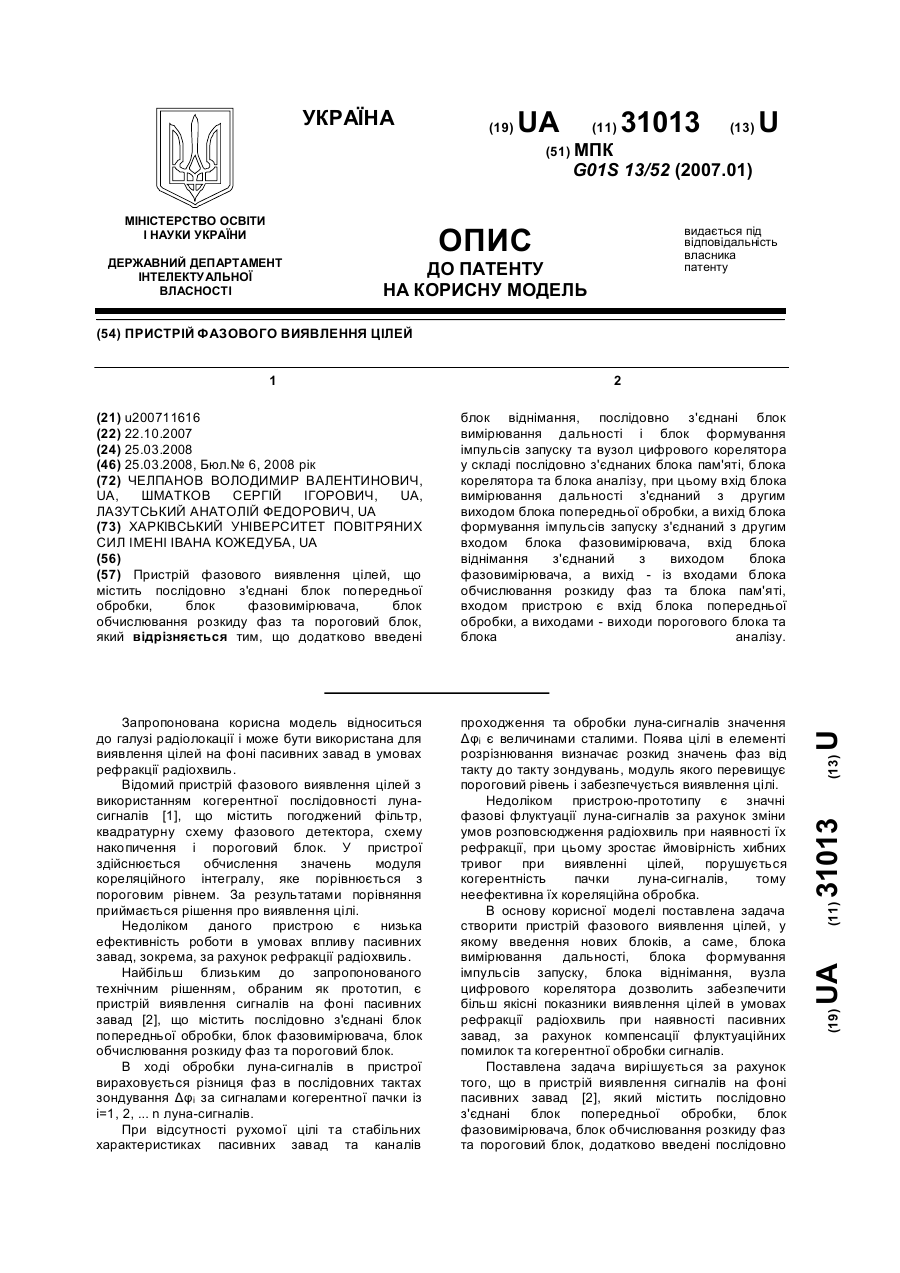
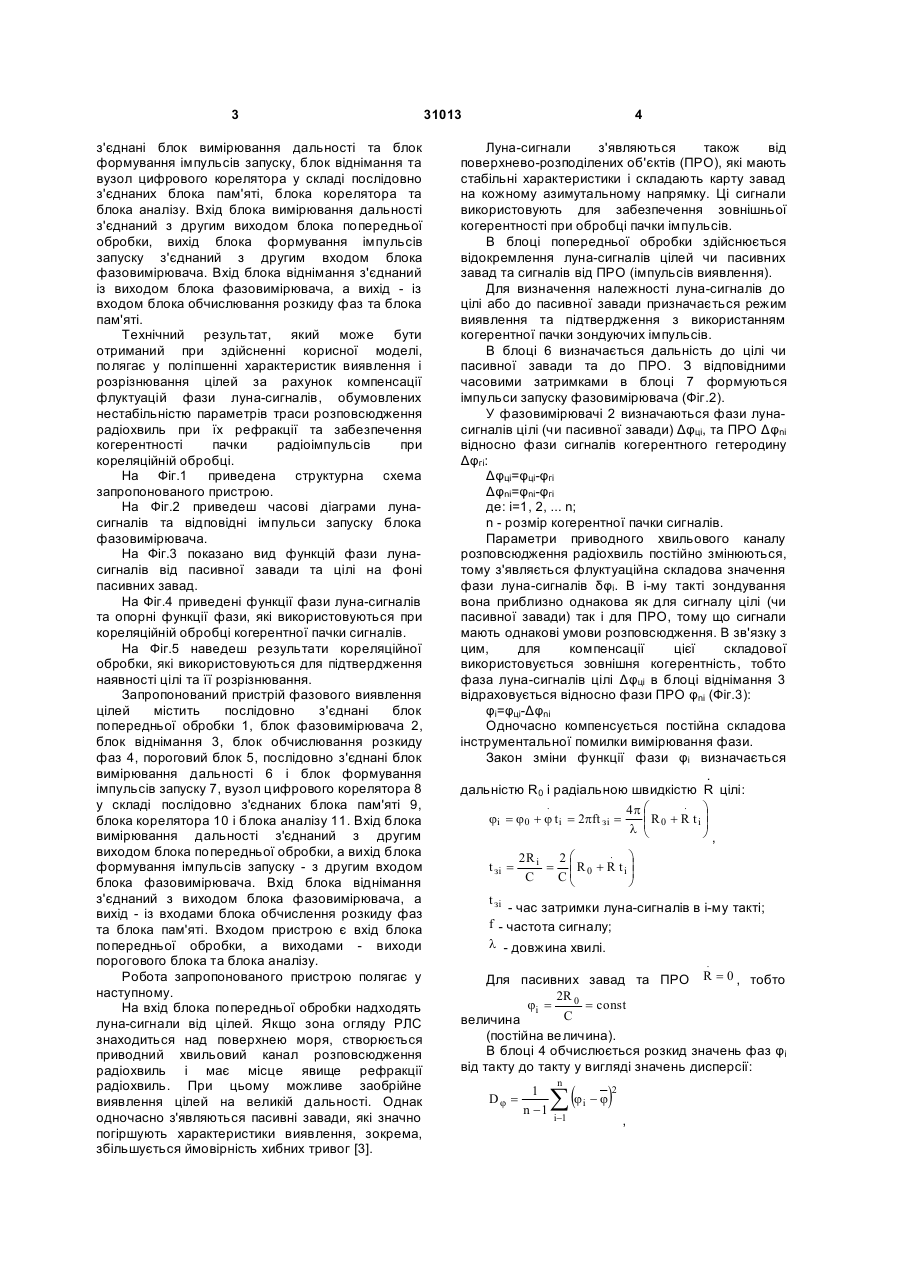
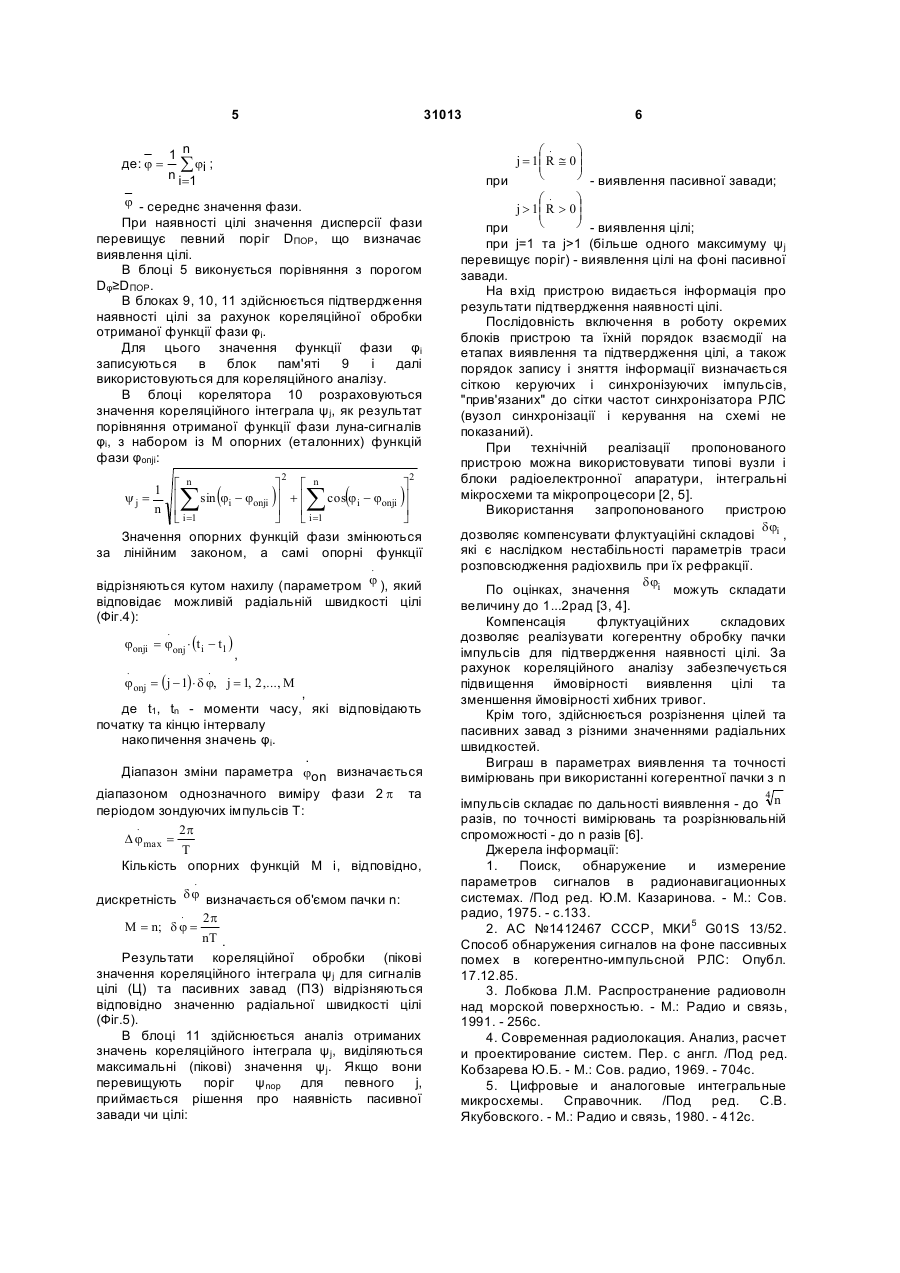
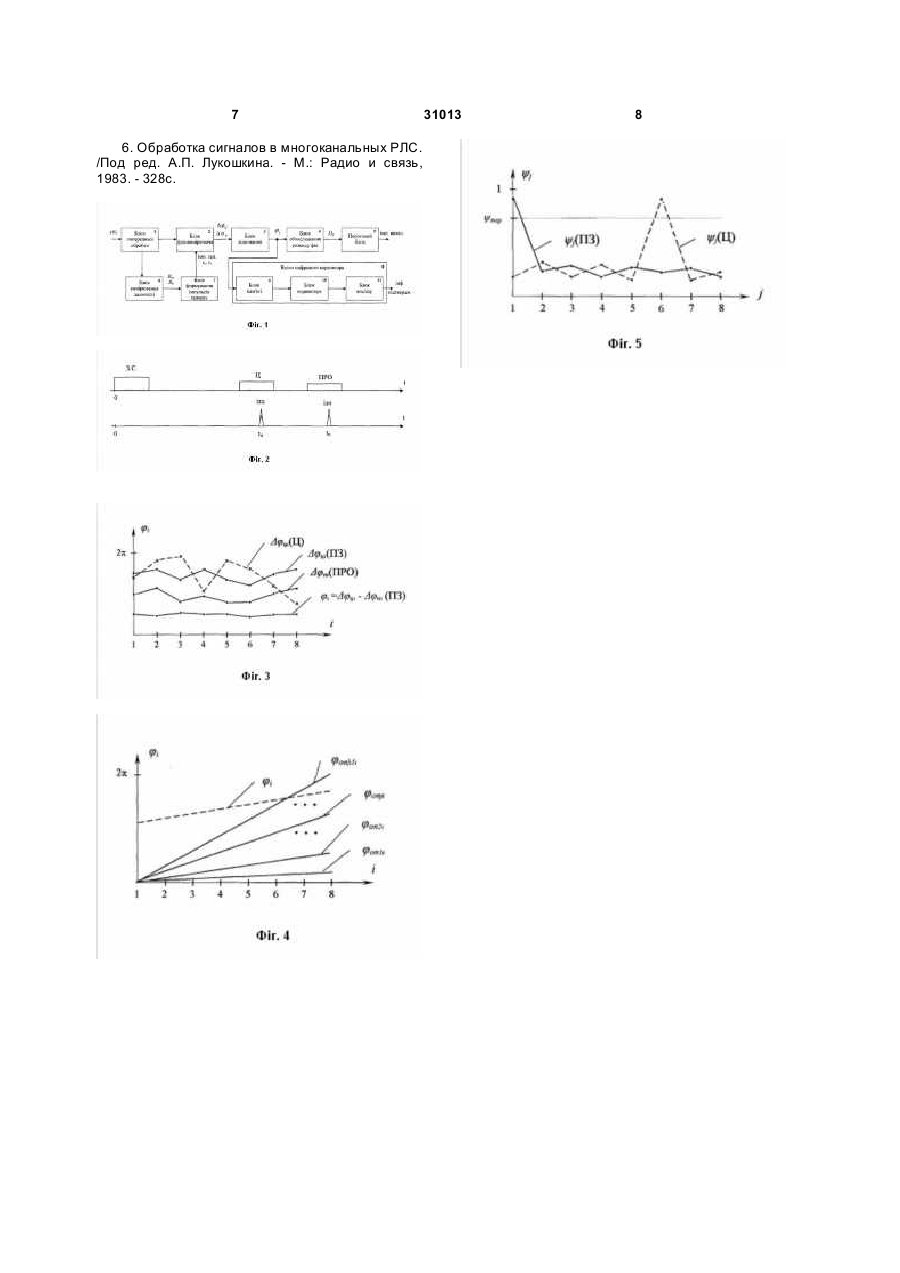
Пристрій фазового виявлення цілей, що містить послідовно з'єднані блок попередньої обробки, блок фазовимірювача, блок обчислювання розкиду фаз та пороговий блок, який відрізняється тим, що додатково введені 3 з'єднані блок вимірювання дальності та блок формування імпульсів запуску, блок віднімання та вузол цифрового корелятора у складі послідовно з'єднаних блока пам'яті, блока корелятора та блока аналізу. Вхід блока вимірювання дальності з'єднаний з другим виходом блока попередньої обробки, вихід блока формування імпульсів запуску з'єднаний з другим входом блока фазовимірювача. Вхід блока віднімання з'єднаний із виходом блока фазовимірювача, а вихід - із входом блока обчислювання розкиду фаз та блока пам'яті. Технічний результат, який може бути отриманий при здійсненні корисної моделі, полягає у поліпшенні характеристик виявлення і розрізнювання цілей за рахунок компенсації флуктуацій фази луна-сигналів, обумовлених нестабільністю параметрів траси розповсюдження радіохвиль при їх рефракції та забезпечення когерентності пачки радіоімпульсів при кореляційній обробці. На Фіг.1 приведена структурна схема запропонованого пристрою. На Фіг.2 приведеш часові діаграми лунасигналів та відповідні імпульси запуску блока фазовимірювача. На Фіг.3 показано вид функцій фази лунасигналів від пасивної завади та цілі на фоні пасивних завад. На Фіг.4 приведені функції фази луна-сигналів та опорні функції фази, які використовуються при кореляційній обробці когерентної пачки сигналів. На Фіг.5 наведеш результати кореляційної обробки, які використовуються для підтвердження наявності цілі та її розрізнювання. Запропонований пристрій фазового виявлення цілей містить послідовно з'єднані блок попередньої обробки 1, блок фазовимірювача 2, блок віднімання 3, блок обчислювання розкиду фаз 4, пороговий блок 5, послідовно з'єднані блок вимірювання дальності 6 і блок формування імпульсів запуску 7, вузол цифрового корелятора 8 у складі послідовно з'єднаних блока пам'яті 9, блока корелятора 10 і блока аналізу 11. Вхід блока вимірювання дальності з'єднаний з другим виходом блока попередньої обробки, а вихід блока формування імпульсів запуску - з другим входом блока фазовимірювача. Вхід блока віднімання з'єднаний з виходом блока фазовимірювача, а вихід - із входами блока обчислення розкиду фаз та блока пам'яті. Входом пристрою є вхід блока попередньої обробки, а виходами - виходи порогового блока та блока аналізу. Робота запропонованого пристрою полягає у наступному. На вхід блока попередньої обробки надходять луна-сигнали від цілей. Якщо зона огляду РЛС знаходиться над поверхнею моря, створюється приводний хвильовий канал розповсюдження радіохвиль і має місце явище рефракції радіохвиль. При цьому можливе заобрійне виявлення цілей на великій дальності. Однак одночасно з'являються пасивні завади, які значно погіршують характеристики виявлення, зокрема, збільшується ймовірність хибних тривог [3]. 31013 4 Луна-сигнали з'являються також від поверхнево-розподілених об'єктів (ПРО), які мають стабільні характеристики і складають карту завад на кожному азимутальному напрямку. Ці сигнали використовують для забезпечення зовнішньої когерентності при обробці пачки імпульсів. В блоці попередньої обробки здійснюється відокремлення луна-сигналів цілей чи пасивних завад та сигналів від ПРО (імпульсів виявлення). Для визначення належності луна-сигналів до цілі або до пасивної завади призначається режим виявлення та підтвердження з використанням когерентної пачки зондуючих імпульсів. В блоці 6 визначається дальність до цілі чи пасивної завади та до ПРО. З відповідними часовими затримками в блоці 7 формуються імпульси запуску фазовимірювача (Фіг.2). У фазовимірювачі 2 визначаються фази лунасигналів цілі (чи пасивної завади) Δφцi, та ПРО Δφni відносно фази сигналів когерентного гетеродину Δφгi: Δφцi= φцi-φгi Δφni= φni-φгi де: і=1, 2, ... n; n - розмір когерентної пачки сигналів. Параметри приводного хвильового каналу розповсюдження радіохвиль постійно змінюються, тому з'являється флуктуаційна складова значення фази луна-сигналів δφi. В i-му такті зондування вона приблизно однакова як для сигналу цілі (чи пасивної завади) так і для ПРО, тому що сигнали мають однакові умови розповсюдження. В зв'язку з цим, для компенсації цієї складової використовується зовнішня когерентність, тобто фаза луна-сигналів цілі Δφцi в блоці віднімання 3 відраховується відносно фази ПРО φni (Фіг.3): φi=φцi-Δφni Одночасно компенсується постійна складова інструментальної помилки вимірювання фази. Закон зміни функції фази φi визначається . дальністю R0 і радіальною швидкістю R цілі: . . ö 4p æ ç R0 + R ti ÷ ji = j 0 + j t i = 2pft зі = ÷ l ç ø, è . ö 2R i 2 æ t зі = = ç R0 + R ti ÷ ÷ C Cç ø è t зі - час затримки луна-сигналів в і-му такті; f - частота сигналу; l - довжина хвилі. . Для пасивних завад та ПРО R = 0 , тобто 2R 0 ji = = const C величина (постійна величина). В блоці 4 обчислюється розкид значень фаз φi від такту до такту у вигляді значень дисперсії: Dj = 1 n -1 n å (j - j) 2 i i-1 , 5 де: j = 31013 1 n å ji ; n i =1 j - середнє значення фази. При наявності цілі значення дисперсії фази перевищує певний поріг DПОР, що визначає виявлення цілі. В блоці 5 виконується порівняння з порогом Dφ≥DПОР. В блоках 9, 10, 11 здійснюється підтвердження наявності цілі за рахунок кореляційної обробки отриманої функції фази φi. Для цього значення функції фази φi записуються в блок пам'яті 9 і далі використовуються для кореляційного аналізу. В блоці корелятора 10 розраховуються значення кореляційного інтеграла ψ j, як результат порівняння отриманої функції фази луна-сигналів φi, з набором із М опорних (еталонних) функцій фази φопji: 2 2 n ù é n ù 1 é ê sin ji - jonji ú + ê yj = cos j i - jonji ú n ê ú ê ú û ë i =1 ë i =1 û Значення опорних функцій фази змінюються за лінійним законом, а самі опорні функції å ( ) å ( ) . відрізняються кутом нахилу (параметром j ), який відповідає можливій радіальній швидкості цілі (Фіг.4): . jonji = jonj × (t i - t1 ) . j onj = . ( j - 1) × d j, , j = 1, 2 ,..., M , де t1, tn - моменти часу, які відповідають початку та кінцю інтервалу накопичення значень φi. . Діапазон зміни параметра jon визначається діапазоном однозначного виміру фази 2 p та періодом зондуючих імпульсів Т: . 2p D jmax = T Кількість опорних функцій М і, відповідно, . дискретність d j визначається об'ємом пачки n: . 2p M = n; d j = nT . Результати кореляційної обробки (пікові значення кореляційного інтеграла ψ j для сигналів цілі (Ц) та пасивних завад (ПЗ) відрізняються відповідно значенню радіальної швидкості цілі (Фіг.5). В блоці 11 здійснюється аналіз отриманих значень кореляційного інтеграла ψ j, виділяються максимальні (пікові) значення ψj. Якщо вони перевищують поріг ψnop для певного j, приймається рішення про наявність пасивної завади чи цілі: 6 ö æ. j = 1ç R @ 0 ÷ ÷ ç ø - виявлення пасивної завади; è при ö æ. j > 1ç R > 0÷ ÷ ç ø - виявлення цілі; è при при j=1 та j>1 (більше одного максимуму ψj перевищує поріг) - виявлення цілі на фоні пасивної завади. На вхід пристрою видається інформація про результати підтвердження наявності цілі. Послідовність включення в роботу окремих блоків пристрою та їхній порядок взаємодії на етапах виявлення та підтвердження цілі, а також порядок запису і зняття інформації визначається сіткою керуючих і синхронізуючих імпульсів, "прив'язаних" до сітки частот синхронізатора РЛС (вузол синхронізації і керування на схемі не показаний). При технічній реалізації пропонованого пристрою можна використовувати типові вузли і блоки радіоелектронної апаратури, інтегральні мікросхеми та мікропроцесори [2, 5]. Використання запропонованого пристрою dji дозволяє компенсувати флуктуаційні складові , які є наслідком нестабільності параметрів траси розповсюдження радіохвиль при їх рефракції. dji По оцінках, значення можуть складати величину до 1...2рад [3, 4]. Компенсація флуктуаційних складових дозволяє реалізувати когерентну обробку пачки імпульсів для підтвердження наявності цілі. За рахунок кореляційного аналізу забезпечується підвищення ймовірності виявлення цілі та зменшення ймовірності хибних тривог. Крім того, здійснюється розрізнення цілей та пасивних завад з різними значеннями радіальних швидкостей. Виграш в параметрах виявлення та точності вимірювань при використанні когерентної пачки з n 4 імпульсів складає по дальності виявлення - до n разів, по точності вимірювань та розрізнювальній спроможності - до n разів [6]. Джерела інформації: 1. Поиск, обнаружение и измерение параметров сигналов в радионавигационных системах. /Под ред. Ю.М. Казаринова. - М.: Сов. радио, 1975. - с.133. 2. АС №1412467 СССР, МКИ5 G01S 13/52. Способ обнаружения сигналов на фоне пассивных помех в когерентно-импульсной РЛС: Опубл. 17.12.85. 3. Лобкова Л.М. Распространение радиоволн над морской поверхностью. - М.: Радио и связь, 1991. - 256с. 4. Современная радиолокация. Анализ, расчет и проектирование систем. Пер. с англ. /Под ред. Кобзарева Ю.Б. - М.: Сов. радио, 1969. - 704с. 5. Цифровые и аналоговые интегральные микросхемы. Справочник. /Под ред. С.В. Якубовского. - М.: Радио и связь, 1980. - 412с. 7 6. Обработка сигналов в многоканальных РЛС. /Под ред. А.П. Лукошкина. - М.: Радио и связь, 1983. - 328с. 31013 8
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for phase reveal of targets
Автори англійськоюChelpanov Volodymyr Valentynovych, Shmatkov Serhii Ihorovych, Lazutskyi Anatolii Fedorovych
Назва патенту російськоюУстройство фазового выявления целей
Автори російськоюЧелпанов Владимир Валентинович, Шматков Сергей Игоревич, Лазутский Анатолий Федорович
МПК / Мітки
МПК: G01S 13/52
Мітки: цілей, виявлення, фазового, пристрій
Код посилання
<a href="https://ua.patents.su/4-31013-pristrijj-fazovogo-viyavlennya-cilejj.html" target="_blank" rel="follow" title="База патентів України">Пристрій фазового виявлення цілей</a>
Пристрій виявлення сигналів
Номер патенту: 37871
Опубліковано: 15.05.2003
Автори: Каспирович Олександр Геннадійович, Лаврентьєв Володимир Миколайович, Падалко Віктор Григорович, Мокеєв Юрій Геннадійович, КОНОНОВИЧ ВІКТОР ЯКОВИЧ, Траілін Вячеслав Федорович, Немчин Олександр Федорович, Мирошниченко Михайло Іванович, КОПНОВ МИХАЙЛО ОЛЕКСАНДРОВИЧ
МПК: G01S 7/02
Мітки: пристрій, сигналів, виявлення
Формула / Реферат:
Пристрій виявлення сигналів , який містить розв'язувальний блок, який відрізняється тим, що додатково містить блок оцінки рівня шуму, допоміжний блок затримки, об'єднані входи яких є входом пристрою, подільник, вхід якого підключений до виходу допоміжного блока затримки, послідовно з'єднані (k-1) блоки затримки, виходи кожного з яких та вхід першого підключені відповідно до перших входів k компараторів, вхід першого блока затримки з'єднаний...
Пристрій виявлення сигналів інформації
Номер патенту: 37871
Опубліковано: 15.05.2001
Автори: КОНОНОВИЧ ВІКТОР ЯКОВИЧ, Немчин Олександр Федорович, КОПНОВ МИХАЙЛО ОЛЕКСАНДРОВИЧ, Мокеєв Юрій Геннадійович, Мирошниченко Михайло Іванович, Падалко Віктор Григорович, Каспирович Олександр Геннадійович, Лаврентьєв Володимир Миколайович, Траілін Вячеслав Федорович
МПК: G01S 7/02
Мітки: виявлення, пристрій, сигналів, інформації
Формула / Реферат:
Пристрій виявлення сигналів , який містить розв'язувальний блок, який відрізняється тим, що додатково містить блок оцінки рівня шуму, допоміжний блок затримки, об'єднані входи яких є входом пристрою, подільник, вхід якого підключений до виходу допоміжного блока затримки, послідовно з'єднані (k-1) блоки затримки, виходи кожного з яких та вхід першого підключені відповідно до перших входів k компараторів, вхід першого блока затримки з'єднаний...
Спосіб виявлення повітряних цілей за допомогою системи стільникового зв’язку
Номер патенту: 56922
Опубліковано: 15.05.2003
Автори: Слюсар Вадим Іванович, Тітов Ігор Володимирович
МПК: G01S 13/48, G01S 13/87, G01S 13/86, G01S 13/74, G01S 13/02, G01S 13/06
Мітки: стільникового, зв'язку, повітряних, виявлення, системі, допомогою, цілей, спосіб
Формула / Реферат:
1. Спосіб виявлення повітряних цілей за допомогою системи стільникового зв'язку, який полягає у тому, що базові станції (БС) системи стільникового зв'язку постійно передають сигнали, які відбиваються від повітряних цілей і приймаються сукупністю пасивних приймачів, у кожному з яких здійснюють аналого-цифрове перетворення прийнятих сигналів цілей та подальшу їх цифрову обробку для визначення координат цілей, отримані значення координат...
Моноімпульсна система з фазовим пеленгатором цілей
Номер патенту: 26725
Опубліковано: 10.10.2007
Автори: Гаврілкін Володимир Вільєвіч, Карлов Володимир Дмитрович, Луковський Олег Ярославович, Челпанов Артем Володимирович
МПК: G01S 13/52
Мітки: пеленгатором, цілей, система, фазовим, моноімпульсна
Формула / Реферат:
Моноімпульсна система з фазовим пеленгатором цілей, що містить два паралельно включених приймачі, блок гетеродина, вимірювач фази та вузол оцінки параметрів кутомісцевої траєкторії у складі послідовно з'єднаних блока накопичення вимірів, цифрового корелятора і блока оцінки параметрів кутомісцевої фази, яка відрізняється тим, що додатково введені послідовно з'єднані блок обробки сигналів, блок усереднення одиночних вимірів, блок усереднення...
Пристрій автоматичного виявлення сигналів
Номер патенту: 37870
Опубліковано: 15.05.2003
Автори: Каспирович Олександр Геннадійович, Падалко Віктор Григорович, КОНОНОВИЧ ВІКТОР ЯКОВИЧ, Лаврентьєв Володимир Миколайович, Козловський Петро Леонідович, Немчин Олександр Федорович, Мокеєв Юрій Геннадійович, Мирошниченко Михайло Іванович, КОПНОВ МИХАЙЛО ОЛЕКСАНДРОВИЧ
МПК: G01S 7/36
Мітки: автоматичного, пристрій, виявлення, сигналів
Формула / Реферат:
Пристрій автоматичного виявлення сигналів, що містить q доплерівських фільтруючих каналів з об'єднаними входами, що є входом пристрою, q-входову схему АБО, входи якої з'єднані з виходами доплерівських фільтруючих каналів, бінарний накопичувач, вхід якого з'єднаний з виходом q-входової схеми АБО, а вихід є виходом пристрою, кожен з каналів включає доплерівський фільтр, вхід якого є входом доплерівського фільтруючого каналу, багатовідвідну...
Попередній патент: Спосіб моделювання дисбіозу (дисбактеріозу)
Наступний патент: Пристрій для завантаження сипких матеріалів в клапанні мішки
Випадковий патент: Спосіб оперативного виявлення сильного землетрусу, що насувається