Моноімпульсна система з фазовим пеленгатором цілей
Номер патенту: 26725
Опубліковано: 10.10.2007
Автори: Луковський Олег Ярославович, Карлов Володимир Дмитрович, Гаврілкін Володимир Вільєвіч, Челпанов Артем Володимирович
Формула / Реферат
Моноімпульсна система з фазовим пеленгатором цілей, що містить два паралельно включених приймачі, блок гетеродина, вимірювач фази та вузол оцінки параметрів кутомісцевої траєкторії у складі послідовно з'єднаних блока накопичення вимірів, цифрового корелятора і блока оцінки параметрів кутомісцевої фази, яка відрізняється тим, що додатково введені послідовно з'єднані блок обробки сигналів, блок усереднення одиночних вимірів, блок усереднення серії вимірів, блок виявлення групової цілі, фільтр супроводження одиночних цілей і фільтр супроводження групової цілі, при цьому вихід блока гетеродина з'єднаний з другими входами приймачів, перши виходи приймачів з'єднані зі входами блока обробки сигналів, другі виходи приймачів з'єднані зі входами вимірювача фази, вихід якого з'єднаний з другим входом блока усереднення одиничних вимірів, вхід фільтра супроводження групової цілі з'єднаний з другим виходом блока виявлення групової цілі, а вхід вузла оцінки параметрів кутомісцевої траєкторії - з третім виходом блока виявлення групової цілі, входами системи є входи приймачів, а виходами - виходи фільтра супроводження одиночних цілей, фільтра супроводження групової цілі та вузла оцінки параметрів кутомісцевої траєкторії.
Текст
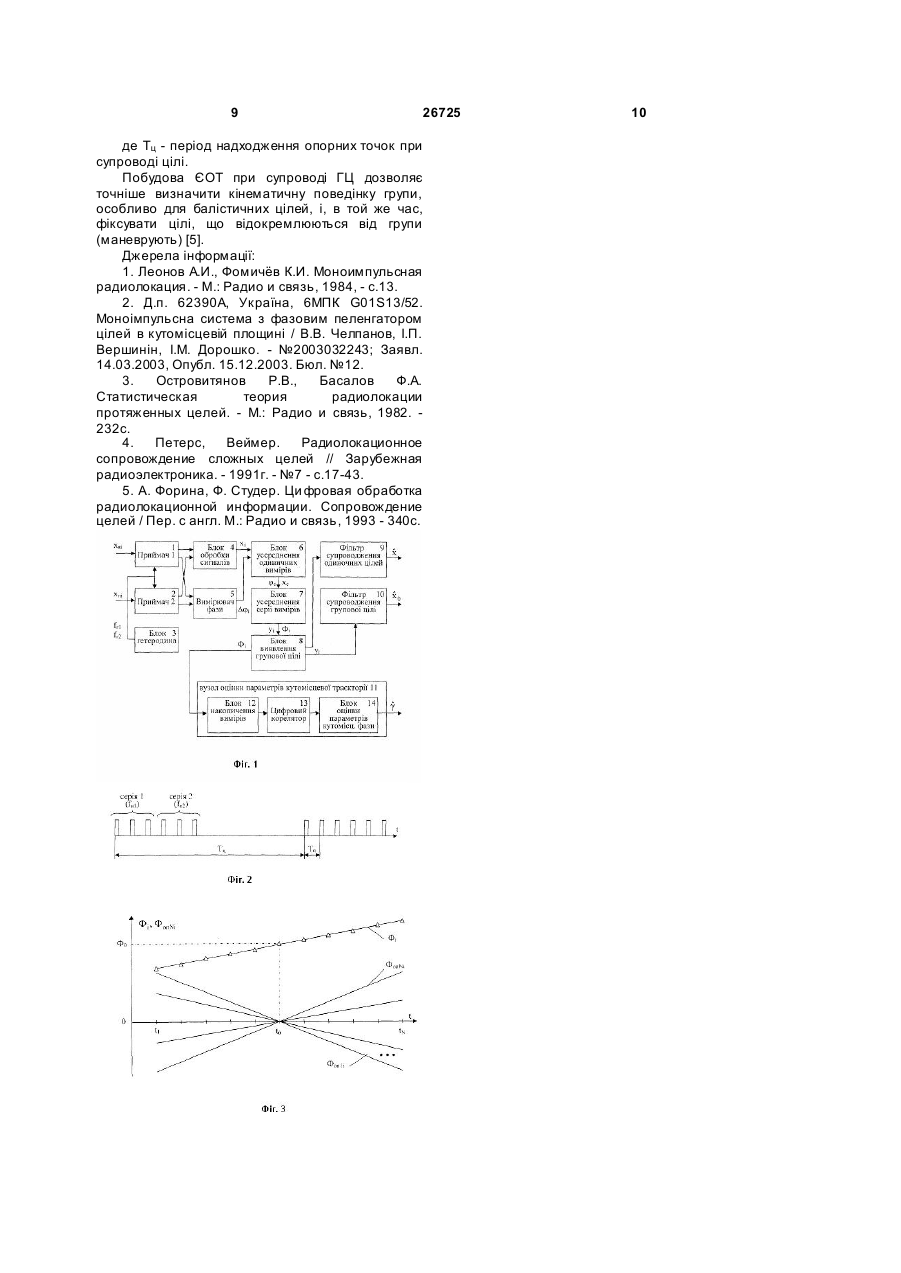
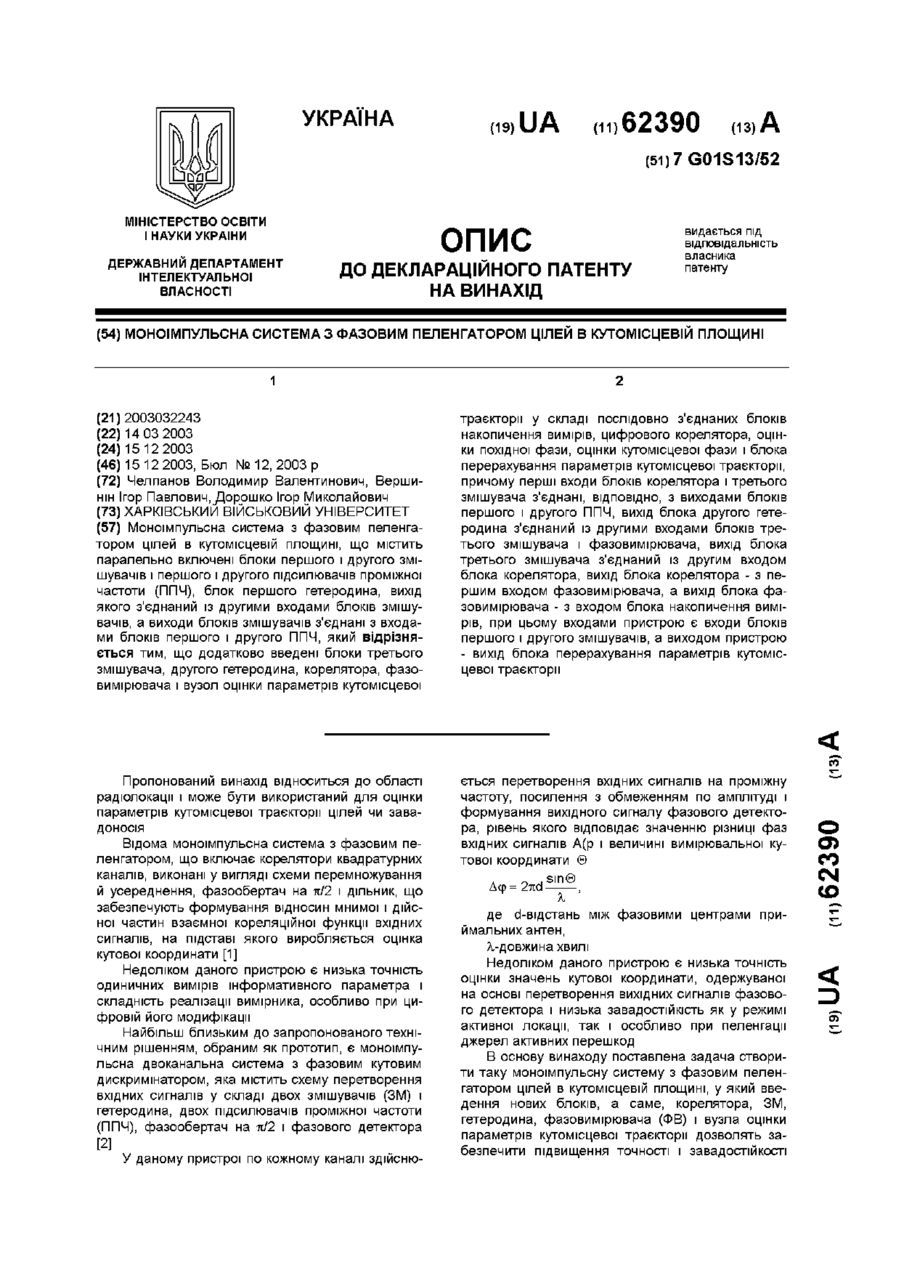
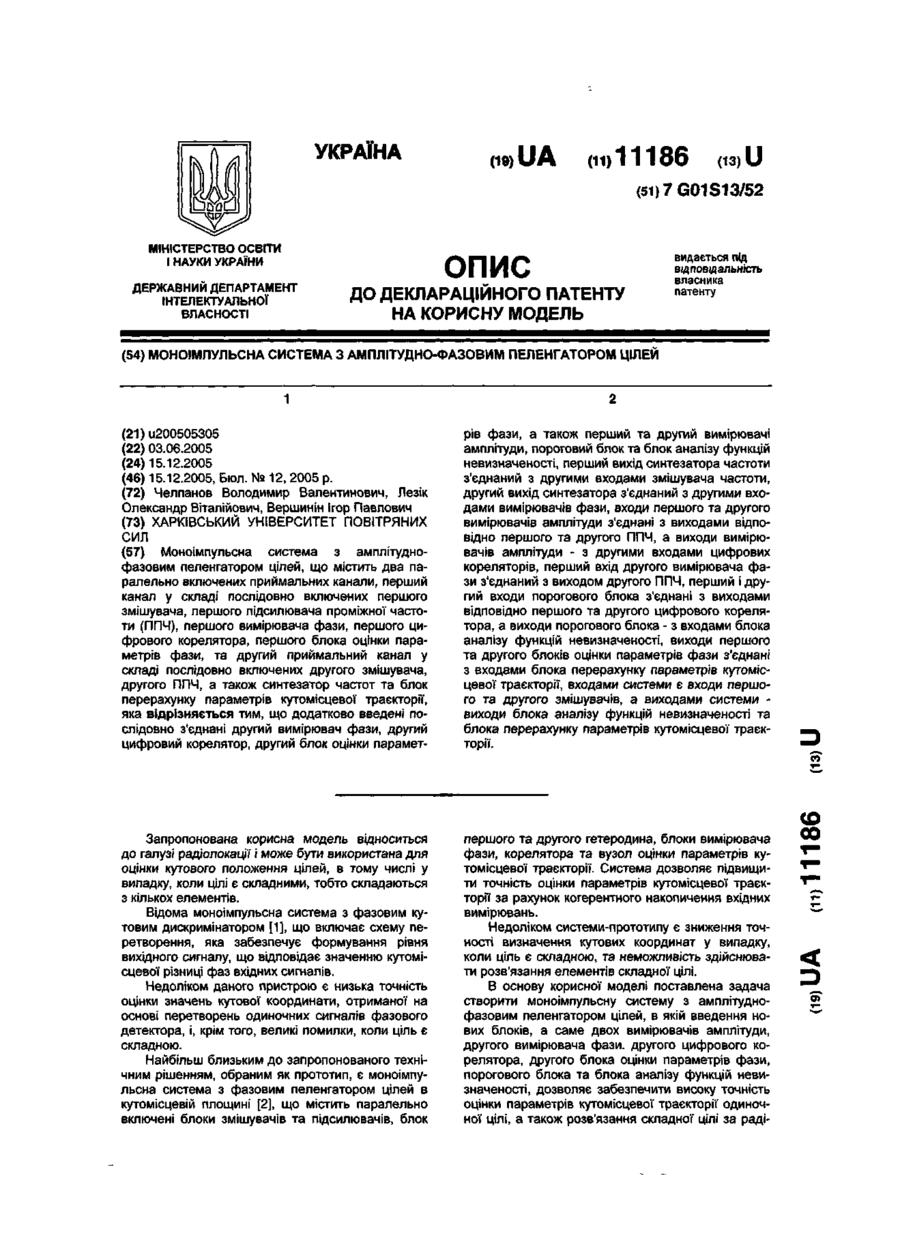
Моноімпульсна система з фазовим пеленгатором цілей, що містить два паралельно включених приймачі, блок гетеродина, вимірювач фази та вузол оцінки параметрів кутомісцевої траєкторії у складі послідовно з'єднаних блока накопичення вимірів, цифрового корелятора і блока оцінки параметрів кутомісцевої фази, яка відрізняє ться тим, що додатково введені послідовно з'єднані блок обробки сигналів, блок 3 26725 кутомісцевої траєкторії, додатково введені послідовно з'єднанні блок обробки сигналів, блок усереднення одиночних вимірів, блок усереднення серії вимірів, блок виявлення групової цілі, фільтр супроводження одиночних цілей та фільтр супроводження групової цілі. Вихід блока гетеродина з'єднаний зі другими входами приймачів, перші виходи приймачів з'єднані зі входами блока обробки сигналів, другі ви ходи приймачів з'єднані зі входами вимірювача фази, вихід якого з'єднаний з другим входом блока усереднення одиночних вимірів. Вхід фільтра супроводження групової цілі з'єднаний з другим виходом блока виявлення групової цілі, а вхід вузла оцінки параметрів кутомісцевої траєкторії - із третім виходом блока виявлення групової цілі. Технічний результат, який може бути отриманий при здійснені корисної моделі полягає у можливості компенсації флуктуаційних помилок, визначених стр уктурою складної цілі за рахунок усереднення вимірів, які проводяться зі змінної частот зондуючи х сигналів, також при кореляційної обробці функції кутомісцевої фази і за рахунок побудови єдиної опорної траєкторії, яка визначає кінематичні властивості траєкторії групової цілі. На Фіг.1 приведена структурна схема запропонованої системи. На Фіг.2 приведені часові діаграми послідовності формування серії зондуючих імпульсів із змінної несучих частот. На Фіг.3 показано вид функції кутомісцевої фази луна-сигналів моноімпульсної системи та опорні функції фази. Запропонована моноімпульсна система з фазовим пеленгатором цілей містить два паралельно включених приймачі 1, 2, блок гетеродина 3, вимірювач фази (ВФ) 5, послідовно з'єднаний блок обробки сигналів 4, блок усереднення одиничних вимірів 6, блок усереднення серії вимірів 7, блок виявлення групової цілі 8, фільтр супроводження одиночних цілей 9, фільтр супроводження групової цілі 10 та вузол оцінки параметрів кутомісцевої траєкторії 11 у складі послідовно з'єднаних блока накопичення вимірів 12, цифрового корелятора 13 і блока оцінки параметрів кутомісцевої фази 14. Вихід блока гетеродина з'єднаний з другими входами приймачів, перші виходи приймачів з'єднані зі входами блока обробки сигналів, другі ви ходи приймачів з'єднані зі входами вимірювача фази, вихід якого з'єднаний з другим входом блока усереднення одиночних вимірів. Вхід фільтра супроводження групової цілі з'єднаний з другим виходом блока виявлення групової цілі, а вхід вузла оцінки параметрів кутомісцевої траєкторії з третім виходом блока виявлення групової цілі. Входами системи є входи першого та другого приймачів, а виходами є виходи фільтрів супроводження одиночних та групових цілей і вузла оцінки параметрів кутомісцевої траєкторії. Робота запропонованої системи полягає у наступному. На входи першого та другого приймача 1, 2 надходять луна-сигнали xві, xні на несучій частоті fн з верхньої та нижньої антен моноімпульсної 4 системи, фазові центри, які х рознесені на відстань d. В приймачах здійснюється підсилення сигналів, їх перетворення на проміжну частоту fпp з використанням сигналу гетеродину fг : fпр=fг-fн Сигнали з приймачів надходять на вимірювач фази, де визначаються кутові значення різниці фаз Djі в момент часу tі, які характеризують кутомісцеву координату цілі gі в фазовому пеленгаторі: 2pd Dji= sin gi . l В блоці обробки сигналів 4 здійснюється підсумовування сигналів двох приймальних каналів, їх оптимальна (узгоджена) обробка та визначення інформативних параметрів з координат дальності та азимуту Rі, b і. У разі складної цілі (СЦ) мають місце додаткові помилки вимірювання параметрів руху цілей. Якщо елементи СЦ не розрізняються по відповідних координатах в процесі супроводу, то за рахунок зміни їх просторового положення виникають флуктуації параметрів відбитих сигналів, так звані шуми СЦ, що приводять до помилок вимірювання дальності і кутових координат. Шуми СЦ у ряді випадків зручно розглядати як флуктуації положення її центру, що уявляється, відносно геометричного центру або точки рівноваги. Зокрема, для фазової моноімпульсної системи точкою рівноваги є фазовий центр цілі, тобто координати точки, для якої луна-сигнали від всіх елементів СЦ перебувають у фазі. Траєкторія геометричного центру або точки рівноваги СЦ (єдина опорна траєкторія - ЄОТ) описує характер її р уху. Помилки вимірювання координат СЦ можуть мати досить великі значення, які перевищують її геометричні розміри. У зв'язку з цим необхідно передбачити можливі зменшення помилок оцінки параметрів руху при супроводі СЦ. У даній моноімпульсній системі використані наступні методи зменшення (компенсації) помилок: 1) усереднювання (згладжування) одиничних вимірів координат в процесі їх накопичення; 2) зміна несучої частоти зондуючи х сигналів в двох серіях вимірювань при формуванні параметрів опорних точок супроводу по кутових координатах і дальності; 3) фільтрація (згладжування) опорних точок супроводу СЦ і побудова єдиної опорної траєкторії (траєкторії геометричного центру складної або групової цілі). Усереднювання серії n одиничних вимірів координат здійснюється в блоці 6. За час накопичення n вимірів елементи СЦ змінюють своє положення, змінюються також величина і знак флуктуаційних помилок. Усереднювання дає можливість зменшити як шумову, так і флуктуаційну помилку вимірювання координат СЦ. Усереднювання серії вимірів координат дальності і азимута здійснюється таким чином: 5 26725 1 n å xi , n i=1 де хi - виміряне значення дальності Ri або азимуту b i. Для серії вимірів кутомісцевої фази, враховуючи їх можливу неоднозначність, усереднювання здійснюється відповідно до виразу: xc = n å sinDji = F c arctg in 1 = . å cos Dji = 1 i Параметри (координати) кожної опорної точки, уi Фi формуються в блоці 7 шляхом усереднювання по двох серіях вимірів, хc та Фc для різних несучи х частот зондуючи х сигналів f н1 і f н2, та, відповідних частот гетеродина fг1, і, fг2. Для і-го циклу супроводу параметри опорних точок по дальності і азимуту (уі) і кутомісцевій фазі (Фі) визначаються, як: 1 yi = ( xc 1 + xc 2 ), 2 sinF c1 + sinF c2 F i = arctg . cos F c1 + cos Fc 2 Значення частоти сигналів відрізняються на величину, яка забезпечує зміну різниці фаз лунасигналів від елементів складної цілі для її типової структури на величину Dj ³ 2 p . (Фіг.2) [3]. Усереднювання із зміною несучої частоти дозволяє зменшити як шумову, так і флуктуаційні помилки вимірювання параметрів опорних точок для СЦ. При супроводі СЦ, якщо її елементи відрізняються хоч би по одній координаті, наприклад, по дальності (назвемо таку СЦ групова ціль - ГЦ), доцільно формування єдиної опорної траєкторії (ЄОТ), тобто побудова траєкторії руху її геометричного центру. Необхідність побудови ЄОТ групової (складної) цілі викликана наступним. Роздільний супровід елементів ГЦ (СЦ) вимагає значного завантаження цільових каналів, і, може привести до великих помилок оцінки параметрів траєкторії при переплутуванні траєкторії елементів (при попаданні декількох опорних точок в строби супроводу і їх неправильної селекції). Траєкторія геометричного центру ЄОТ добре описує характер руху ГЦ (СЦ). У зв'язку з цим в блоці 8 здійснюється виявлення ГЦ (СЦ). Критерієм виявлення є наявність декількох траєкторій із близькими значеннями параметрів опорних точок по дальності і радіальній швидкості, нерозв'язаних по кутових координатах: уki - у lі £ D у, . . . уki - у lі £ D у, (6) 6 . . yki , y li, y ki, y li де, - значення дальності і радіальної швидкості відповідно для k-ої та ℓ-ої цілі із складу ГЦ; (2) . Dy, D y - величина стробів ототожнювання. Якщо на супроводі перебуває одна траєкторія, критерієм виявлення СЦ (ГЦ) може бути наявність декількох опорних точок в межах стробу супроводу. У разі одиночної цілі (ОЦ) фільтрація опорних точок траєкторії здійснюється по відомих рекурентних співвідношеннях фільтру Калмана в блоці 9 [5]: ˆ xn = x эn + kn (yn - Hxэn ), ˆ x де n - вектор оцінок параметрів траєкторії на t момент часу n ; yn - виміряні значення параметрів; H - матриця перерахунку; x эn - екстрапольовані значення параметрів; kn коефіцієнт посилення = y n HT R-1 k n ; фільтру; n yn - кореляційна матриця помилок (КМП) оцінки параметрів; Rn - КМП вимірювань. У разі групової цілі здійснюється супровід геометричного центру ГЦ ЄОТ. Для цього використовується звичайний калманівський фільтр, який обробляє усереднені параметри m опорних точок, що потрапили в строб ототожнювання. Даний строб формується біля x екстрапольованого значення эn : ˆ xn = x эn + kn (yn - Hxэn ), yn = де yin 1 m m åy i =1 in ; - виміряне значення параметра і-ої опорної точки і=1, 2,...m; m - кількість опорних точок, що потрапили в строб ототожнення. Фільтрація опорних точок ГЦ здійснюється в блоці 10. Побудова кутомісцевої траєкторії по фазових вимірюваннях моноімпульсної системи здійснюється в блоках вузла 11. Звичайне рекурентне згладжування опорних точок тут неефективно внаслідок неоднозначності Fi вимірювань кутомісцевої різниці фаз . Для оцінки параметрів кутомісцевої траєкторії доцільно використовува ти кореляційний метод. Траєкторія кутомісцевої фази із достатнім ступенем точності може бути представлена у & вигляді лінійної функції із параметрами F : & F = F = F + F (t - t ), (ti) i 0 i 0 (3) (4) (5) 7 26725 & F 0 ,F де - відповідні значення кутомісцевої t фази і її похідної на момент часу 0 ; t0 - час прив'язки, як правило, відповідає середині інтервалу спостереження (супроводи). t На інтервалі супроводу СЦ c в блоці 12 здійснюється накопичення N опорних точок (вимірів) кутомісцевої фази, визначуваних (1) (3) (5). F Далі в блоці 13 отримана функція фази i порівнюється із набором з N опорних (еталонних) F onji функцій фази . Порівняння здійснюється шляхом підрахунку N значень кореляційного інтеграла виду: ( ) 2 ( ) 2 1 éN ù éN ù ê å Bi sin F i - F onji ú ê å Bi cos Fi - Fonji ú , N ë i=1 û ë i=1 û Bi де вагові коефіцієнти Хеммінга, що забезпечують зменшення рівня бокових пелюсток (побічних максимумів). Значення опорних функцій фази змінюються по лінійному закону, а самі опорні функції & F відрізняються кутом нахилу (параметром onj ): & F = F (t - t ), Q= onji & F onj де t1, t 0 , t N onj i 0 æ Nö & = ç j - ÷ dF; j = 1 2,...N; t 0 = 0,5 (t N - t 1 ) , è 2ø , - моменти часу, відповідні початку, середині і кінцю інтервалу спостереження (Фіг.3). Значення дискретності відліку звіту похідної & фази dF вибираються виходячи з точності одержуваних оцінок, яка визначається часом t супроводу c : p dF = 8tc де tc = tN - t1. Діапазон аналізу 2p & 2p . £ DF £ tc tc Параметри траєкторії кутомісцевої фази F0 і & F , і параметри кутомісцевої траєкторії g і & g 0 визначаються в блоці 14. ˆ & За оцінку похідної фази F в траєкторії (9) приймається параметр тієї (к-ой) опорної функції, при порівнянні з якою отримано максимальне значення кореляційного інтеграла (10); max ˆ & & & Qм = Q j тобто F = F опk = k × dF . j ˆ F0 Значення оцінки початкової фази (9) формується як постійна складова виміряної { } 8 F F функції фази i , щодо опорної функції фази ki з & F параметром опk : N ˆ F 0 = arctg å sin(Fi - F ki ) i=1 N å cos(F i - Fki ) , i =1 & F ki = kdF (t i - t 0 ) де Отримані . оцінки параметрів функції ˆ0 ˆ F & кутомісцевої фази і F перераховуються в значення параметрів кутомісцевої траєкторії g0 і & g відповідно до виразу (1), в результаті отримаємо: g(t )= g 0 + & (t - t0 ). g На вихід системи видається така інформація: (10) у разі одиночної цілі-вектор оцінок параметрів ˆ; траєкторії x у випадку складної (групової) цілі - вектор оцінок параметрів єдиної опорної траєкторії по дальності і азимуту, а для кутомісцевої траєкторії & її параметри g0 і g . Послідовність включення в роботу окремих блоків системи і їхній порядок запису та знімання інформації визначається сіткою керуючих і синхронізуючих імпульсів "прив'язаних" до сітки (11) частот синхронізатора РЛС (вузол синхронізації і керування на схемі пристрою не показаний). При технічній реалізації запропонованої системи можна використовувати, типові вузли та блоки радіоелектронної апаратури, інтегральні мікросхеми та мікропроцесори [2]. На етапі обробки n одиничних вимірів їх усереднювання відповідно до (2) і (3) дозволяє зменшити дисперсію шумової помилки в n раз. Значення параметрів опорних точок формується шляхом усереднювання результатів двох серій вимірів для різних частот зондуючих сигналів відповідно до (4) і (5). Це дозволяє зменшити флуктуаційну помилку, обумовлену (12) структурою СЦ. За результатами моделювання [3], відносне зменшення середньоквадратичної sv помилки (СКП) складає величину: (13) sv £ 0,2, sм sм де - максимальна СКП за рахунок структури СЦ, яка може перевищува ти геометричні розміри СЦ [4]. На етапі фільтрації (згладжування) N опорних точок супроводу за рахунок компенсації шумових і флуктуаційних складових дисперсія оцінок 2 dN параметрів в порівнянні з помилками d2 вимірювань 1 зменшується в N раз. Зокрема, для траєкторії кутомісцевої фази (9): d2F d2 F 2 2 dN(F ) = 1 ; dN(F ) = 1 , & 0 N N 9 26725 де Тц - період надходження опорних точок при супроводі цілі. Побудова ЄОТ при супроводі ГЦ дозволяє точніше визначити кінематичну поведінку групи, особливо для балістичних цілей, і, в той же час, фіксувати цілі, що відокремлюються від групи (маневрують) [5]. Джерела інформації: 1. Леонов А.И., Фомичёв К.И. Моноимпульсная радиолокация. - М.: Радио и связь, 1984, - с.13. 2. Д.п. 62390А, Україна, 6МПК G01S13/52. Моноімпульсна система з фазовим пеленгатором цілей в кутомісцевій площині / В.В. Челпанов, І.П. Вершинін, І.М. Дорошко. - №2003032243; Заявл. 14.03.2003, Опубл. 15.12.2003. Бюл. №12. 3. Островитянов Р.В., Басалов Ф.А. Статистическая теория радиолокации протяженных целей. - М.: Радио и связь, 1982. 232с. 4. Петерс, Веймер. Радиолокационное сопровождение сложных целей // Зарубежная радиоэлектроника. - 1991г. - №7 - с.17-43. 5. А. Форина, Ф. Студер. Ци фровая обработка радиолокационной информации. Сопровождение целей / Пер. с англ. М.: Радио и связь, 1993 - 340с. 10
ДивитисяДодаткова інформація
Назва патенту англійськоюMonopulse system with a phase direction finder of targets
Автори англійськоюKarlov Volodymyr Dmytrovych, Lukovskyi Oleg Yaroslavovych, Chelpanov Artem Volodymyrovych, Gavrylkin Volodymyr Vilovych
Назва патенту російськоюМоноимпульсная система с фазовым пеленгатором целей
Автори російськоюКарлов Владимир Дмитриевич, Луковский Олег Ярославович, Челпанов Артем Владимирович, Гаврилкин Владимир Вильевич
МПК / Мітки
МПК: G01S 13/52
Мітки: фазовим, пеленгатором, моноімпульсна, система, цілей
Код посилання
<a href="https://ua.patents.su/5-26725-monoimpulsna-sistema-z-fazovim-pelengatorom-cilejj.html" target="_blank" rel="follow" title="База патентів України">Моноімпульсна система з фазовим пеленгатором цілей</a>
Моноімпульсна система з фазовим пеленгатором цілей в кутомісцевій площині
Номер патенту: 62390
Опубліковано: 15.12.2003
Автори: Челпанов Володимир Валентинович, Дорошко Ігор Миколайович, Вершинін Ігор Павлович
МПК: G01S 13/00, G01S 13/52
Мітки: моноімпульсна, система, цілей, пеленгатором, фазовим, площині, кутомісцевій
Формула / Реферат:
Моноімпульсна система з фазовим пеленгатором цілей в кутомісцевій площині, що містить паралельно включені блоки першого і другого змішувачів і першого і другого підсилювачів проміжної частоти (ППЧ), блок першого гетеродина, вихід якого з'єднаний із другими входами блоків змішувачів, а виходи блоків змішувачів з'єднані з входами блоків першого і другого ППЧ, який відрізняється тим, що додатково введені блоки третього змішувача, другого...
Моноімпульсна система з амплітудно-фазовим пеленгатором цілей
Номер патенту: 11186
Опубліковано: 15.12.2005
Автори: Челпанов Володимир Валентинович, Вершинін Ігор Павлович, Лезік Олександр Віталійович
МПК: G01S 13/52
Мітки: амплітудно-фазовим, пеленгатором, цілей, система, моноімпульсна
Формула / Реферат:
Моноімпульсна система з амплітудно-фазовим пеленгатором цілей, що містить два паралельно включених приймальних канали, перший канал у складі послідовно включених першого змішувача, першого підсилювача проміжної частоти (ППЧ), першого вимірювача фази, першого цифрового корелятора, першого блока оцінки параметрів фази, та другий приймальний канал у складі послідовно включених другого змішувача, другого ППЧ, а також синтезатор частот та блок...
Адаптивний пристрій фільтрації параметрів траєкторії цілей
Номер патенту: 67043
Опубліковано: 15.06.2004
Автори: Карлов Володимир Дмитрийович, Яровий Сергій Володимирович, Петрушенко Миколай Миколайович, Рафальський Юрій Іванович, Челпанов Артем Володимирович
МПК: G01S 13/52
Мітки: траєкторії, параметрів, фільтрації, цілей, адаптивний, пристрій
Формула / Реферат:
Адаптивний пристрій фільтрації параметра траєкторії цілі, що містить фільтр Калмана, пороговий блок і блок вибору максимуму, який відрізняється тим, що додатково введені три блоки пам'яті, блок суматора, блок формування вибірки, блок оцінки прискорення і блок корекції, до того ж, перший блок пам'яті, блок фільтра Калмана, другий блок пам'яті, блок суматора, блок формування вибірки, пороговий блок і блок вибору максимуму з'єднані послідовно,...
Адаптивний пристрій супроводу маневруючих цілей

Номер патенту: 56074
Опубліковано: 15.04.2003
Автори: Карлов Володимир Дмитрийович, Сірик Юрій Анатолійович, Челпанов Артем Володимирович, Пащенко Руслан Едуардович, Яровий Сергій Володимирович, Коваль Олександр Андрійович
МПК: G01S 13/52, G01S 13/00
Мітки: маневруючих, супроводу, пристрій, адаптивний, цілей
Формула / Реферат:
Адаптивний пристрій супроводу маневруючих цілей, що містить послідовно з'єднані блоки фільтра Калмана другого порядку, фільтра Калмана третього порядку і комутатор, який відрізняється тим, що додатково введені блок виявлення маневру і блок оцінки інтенсивності маневру, причому блок виявлення маневру складається із послідовно з'єднаних блока формування вибірок, блока обчислення рангу, блока обчислення рангової статистики і порогового блока, а...
Пристрій фільтрації параметрів траєкторії цілі
Номер патенту: 12818
Опубліковано: 15.03.2006
Автори: Коваль Олександр Андрійович, Карлов Володимир Дмитрович, Луковський Олег Ярославович, Челпанов Артем Володимирович, Петрушенко Микола Миколайович, Квіткін Костянтин Петрович
МПК: G01S 13/52
Мітки: цілі, параметрів, траєкторії, пристрій, фільтрації
Формула / Реферат:
Пристрій фільтрації параметрів траєкторії цілі, що містить лінійний фільтр Калмана, N паралельно включених узгоджених фільтрів, блок вибору максимуму і блок порівняння з порогом, який відрізняється тим, що додатково введений другий фільтр Калмана, блок аналізу динамічних помилок, блок аналізу оцінок і блок комутатора, причому перший вихід першого фільтра Калмана з'єднаний із входом блока аналізу динамічних помилок, другий вихід - із входом...
Попередній патент: Установка змішувача-порогенератора для приготування ніздрюватого бетону
Наступний патент: Спосіб профілактики та лікування гнійних ускладнень післяопераційних ран у хворих, оперованих з приводу туберкульозу та неспецифічних захворювань легень та плеври
Випадковий патент: Уретральний буж лазорика