Широтно-імпульсний спосіб управління імпульсним перетворювачем


Формула / Реферат
Широтно-імпульсний спосіб управління імпульсним перетворювачем (ІП), що містить комутатор і фільтр, який полягає в тому, що вимірюють струм дроселя фільтра і напругу на виході ІП, формують управляючий сигнал і здійснюють управління комутатором, який відрізняється тим, що вимірюють решту змінних стану фільтра, струм навантаження ІП (для непрямої оцінки величини опору навантаження) і напругу на вході ІП (напругу джерела живлення (ДЖ), отримані виміри через аналоговий мультиплексор передають в аналого-цифровий перетворювач, піддають аналого-цифровому перетворенню, передають в мікроконтролер, формують управляючий сигнал (тривалість імпульсу широтно-імпульсного модулятора (ШІМ) або тривалість підключення напруги ДЖ через фільтр до навантаження) в (k+1)-й період модуляції (ПМ) за формулою:
де dk+1 – оптимальна тривалість імпульсу ШІМ в (k+1)-й ПМ;
– матриця переходу ІП на ПМ по закінченню k-го ПМ, n n;
– вектор керованого переходу ІП на ПМ по закінченню k-го ПМ, n 1;
– матриця нелінійностей ІП на ПМ по закінченню k-го ПМ, n n;
– вектор незалежних від управління змінних стану ІП на ПМ по закінченню k-го ПМ, n;
Т – ПМ широтно-імпульсного модулятора перетворювача, с;
Q – симетрична додатно визначена матриця квадратичної форми, n n;
I – одинична квадратна матриця, n n;
AЗk, AРk – матриці коефіцієнтів ІП для інтервалу підключення напруги (ІПН) ДЖ до фільтра і інтервалу відключення напруги (ІВН) ДЖ від фільтра по закінченню k-го ПМ, n n;
ВЗ, ВР – вектори управління для ІПН і ІВН, n 1;
Xk – вектор стану ІП в просторі станів по закінченню k-го ПМ, n 1;
Umk – напруга ДЖ (амплітуда імпульсу на вході фільтра на ІПН) по закінченню k-го ПМ, В;
n – розмірність ІП в просторі станів із сигналом завдання у вигляді постійної напруги;
k – номер ПМ.
Текст
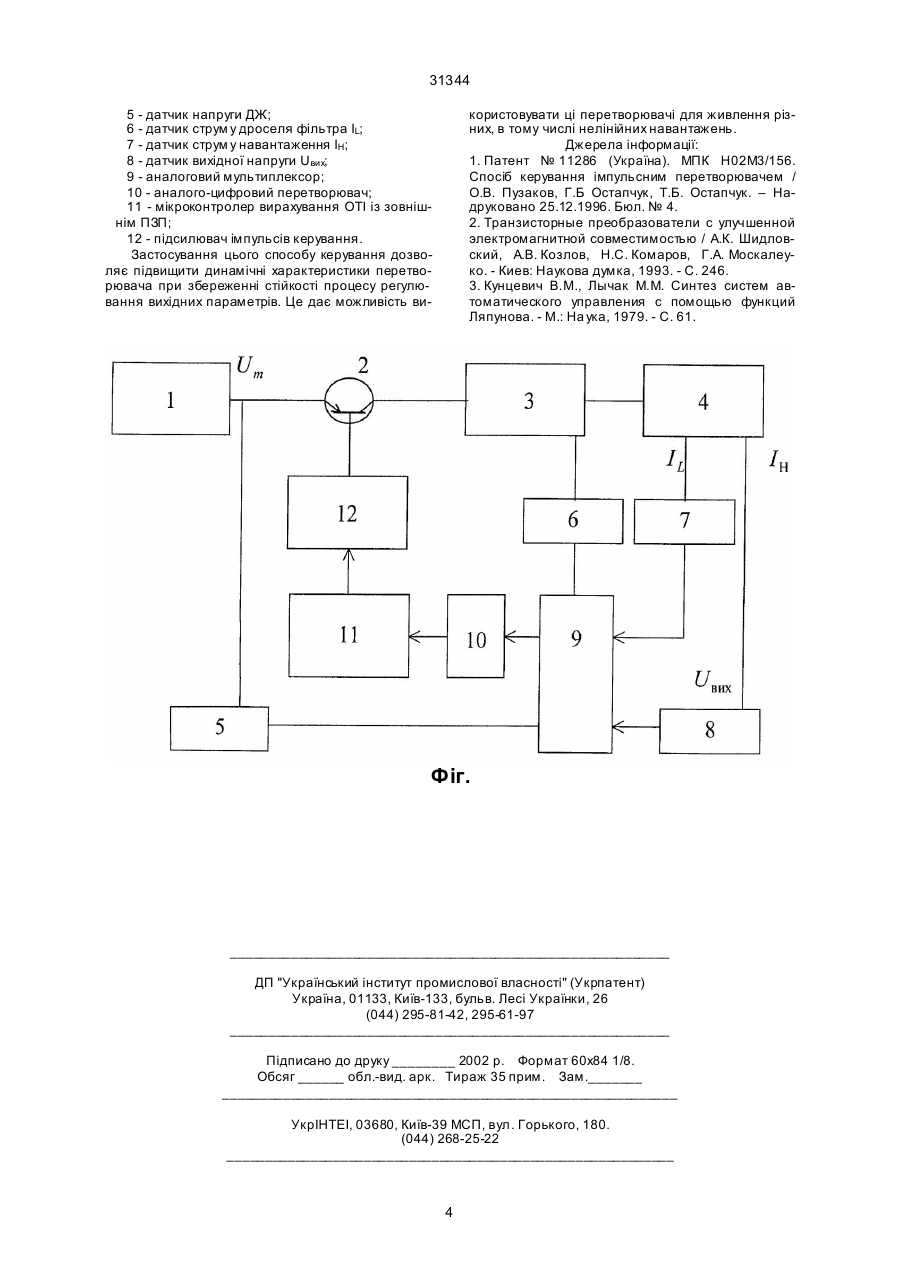
Широтно-імпульсний спосіб управління імпульсним перетворювачем (ІП), що містить комутатор і фільтр, який полягає в тому, що вимірюють струм дроселя фільтра і напругу на ви ході ІП, формують управляючий сигнал і здійснюють управління комутатором, який відрізняється тим, що вимірюють решту змінних стану фільтра, струм навантаження ІП (для непрямої оцінки величини опору навантаження) і напругу на вході ІП (напругу джерела живлення (ДЖ), отримані виміри через аналоговий мультиплексор передають в аналогоцифровий перетворювач, піддають аналого-цифровому перетворенню, передають в мікроконтролер, формують управляючий сигнал (тривалість імпульсу широтно-імпульсного модулятора (ШІМ) або тривалість підключення напруги ДЖ через фільтр до навантаження) в (k+1)-й період модуляції (ПМ) за формулою: 31344 Тому в цьому способі забезпечуються недостатні динамічні характеристики. Найбільш близьким за технічною суттю до способу, що пропонується, є широтно-імпульсний спосіб (ШІС) управління ІП [2], що містить комутатор і фільтр, який полягає в тому, що формують сигнал завдання, вимірюють струм дроселя фільтра і напругу на ви ході ІП (змінні стану фільтра). Отримані виміри з певними коефіцієнтами, що визначаються значенням коефіцієнтів підсилення ланцюга зворотного зв'язку (33), використовують при формуванні тривалості імпульсу керування комутатором (тривалості підключення напруги ДЖ через фільтр до навантаження) в кожному періоді модуляції (ПМ). Для винаходу також характерне вимірювання вихідної напруги, струму дроселя фільтра ІП і використання їх для формування оптимальної тривалості імпульсу керування комутатором. Врахування інформації про вихідну напругу і струм дроселя фільтра ІП сприяє поліпшенню динамічних властивостей ІП з таким способом керування. Проте при такому способі необхідно знайти оптимальні значення коефіцієнтів підсилення ланцюга 33. Вони повинні забезпечувати як високі статичні і динамічні властивості ІП у всьому діапазоні зміни навантаження, так і стійкість процесу регулювання вихідної напруги. Аналітичні методи дослідження таких складних нелінійних імпульсних систем автоматичного керування як ІП розроблені недостатньо, тому основним інструментом визначення оптимального значення коефіцієнтів 33 є їхнє експериментальне знаходження шляхом підбору з використанням натурного взірця, або моделювання електромагнітних процесів в ІП на ЕОМ. У всякому разі розв'язання задачі отримання оптимального значення коефіцієнтів 33 пов'язане з труднощами і значно ускладнюється у випадку застосування багатоланцюгових фільтрів. Крім того, знайдені експериментально коефіцієнти ланцюгів 33 не дають адаптації до зміни якості напруги на вході (напруги ДЖ) і навантаження ІП. Тому в цьому способі забезпечуються прийнятні статичні характеристики, однак динамічні характеристики залишаються недостатньо високими. В основу винаходу поставлено задачу удосконалення ШІС керування ІП шляхом синтезу оптимальної тривалості імпульсу (ОТІ) керування комутатором ІП на основі сучасних методів теорії автоматичного керування, що дає можливість забезпечити поліпшення динамічних характеристик перетворювача при збереженні стійкості процесу регулювання вихідної напруги. Синтез ОТІ керування комутатором ІП проведено із застосуванням методу простору станів (ПС) і дискретного аналогу др угого (прямого) методу Ляпунова [3]. В (k+1)-й ПМ ОТІ d k+1 знаходиться за формулою: d k+1 = [H( T )k + F (T )k Xk ] T Q [ j (T )k Xk + G ( T) k ] , [ H(T )k + F (T )k X k ]T Q [H (T )k + F (T )k Xk ] Н(Т)k=j(Т) k[BЗ-BP] Um k - вектор керованого переходу ІП на ПМ по закінченні k- го ПМ, n 1; F(T) k=j(T) k ( A Зk - A Pk ) - матриця нелінійностей ІП на ПМ по закінченні k-го ПМ, n n; G(T) k=[j(T) k-I] A -1 BP Umk - вектор незалежних Pk від керування змінних стану ІП на ПМ по закінченні k-го ПМ, n 1; T - П М широтно-імпульсного модулятора перетворювача, с; Q - симетрична додатно визначена матриця квадратичної форми, n n; I - одинична квадратна матриця, n n; A Зk , A Pk - матриці коефіцієнтів ІП для інтервалу підключення напруги (ІПН) ДЖ до фільтра і інтервалу відключення напруги (ІВН) ДЖ від фільтра по закінченні k-го ПМ, n n; BЗ, ВР - вектори керування для ІПН і ІВН, n 1; Xk - вектор стану ІП в ПС по закінченні k-го ПМ, n 1; Um k - напруга ДЖ (амплітуда імпульсу на вході фільтра на ІПН) по закінченні k-го ПМ, В; n - розмірність ІП в ПС із сигналом завдання у вигляді постійної напруги UЗ; k - номер ПМ. Для конкретного типу ІП (понижуючий, підвищуючий або ІП із зміною полярності) та конкретного типу і розмірності фільтра потрібно визначити змінні стану; матриці коефіцієнтів АЗ , АР ; вектори управління ВЗ, ВР та вибрати симетричну додатно визначену матрицю Q, що визначає мету функціонування ІП (відтворення на виході постійної напруги чи струму). Після підстановки всіх даних у вираз (1), для конкретного ІП можна отримати значно простішу залежність і при обчисленні ОТІ виконувати тільки операції над скалярами: d k+1 = f (Um k , x 1, x 2 , ... x n-1 , U 3 , p 1, p 2 , ... p r -1, R Hk ), (2) де: х1 , х2, ... хn-1 - змінні стану фільтра ІП по закінченні k - го ПМ; xn=UЗ - напруга завдання ІП, В; р1, р2, ... рr-1 - параметри елементів фільтра і напівпровідників; p r = R Hk - навантаженні ІП по закінченню k-го ПМ, Ом; г - загальна кількість параметрів елементів фільтра і напівпровідників ІП. З аналізу формули (2) можна зробити висновок, що при визначенні ОТІ в кожному ПМ використовуються не тільки 33 за змінними стану фільтра, але й зв'язки за навантаженням і вхідною напругою ІП, тобто забезпечується адаптація до зміни навантаження і вхідної напруги ІП. При цьому, оптимальні значення коефіцієнтів зворотного зв'язку можна отримати в аналітичному вигляді у відповідності з метою функціонування ІП. Це дозволяє забезпечити як оптимізацію статичних і динамічних властивостей ІП, так і стійкість регулювання вихідної напруги. Розглянемо особливості реалізації способу на прикладі імпульсного перетворювача, що реалізує цей спосіб і виконує функції імпульсного стабілізатора напруги (ІСН). ІСН містить силовий транзис (1) де: j(T )k exp ( A pk T ) - матриця переходу ІП на = ПМ по закінченню k-го ПМ, n n; 2 31344 тор VT, що працює в ключовому режимі і виконує роль комутатора, силовий фільтр з дроселем L і конденсатором С. Для ІСН із сигналом завдання у вигляді постійної напруги UЗ параметр n дорівнює 3. Матриці коефіцієнтів АЗ, АР , вектора керування ВЗ, ВР, вектор стану Х і матриця Q із фізичним змістом квадрату похибки відтворення ІСН напруги UЗ мають вигляд: æ - 1/ RHC ç AЗ = ç - 1/ L ç 0 è Отже, оптимальні значення коефіцієнтів зворотного зв'язку КU КI ІСН знайдені в аналітичному вигляді з умови мінімізації квадрату похибки відтворення ІСН постійної вихідної напруги UЗ. На фігурі зображена функціональна схема ІСН, який реалізує ШІС, що пропонується. ІСН містить ДЖ 1 з напругою Um, транзистор 2, LC-фільтр З, навантаження 4, датчик 5 напруги ДЖ, датчик 6 струму дроселя фільтра IL, датчик 7 струму навантаження ІН, датчик 8 вихідної напруги Uвих, аналоговий мультиплексор (AM) 9, аналого-цифровий перетворювач (АЦП) 10, МК 11 вирахування ОТІ із зовнішнім постійним запам'ятовуючим пристроєм (ПЗП), підсилювач імпульсів керування (ПІК) 12. AM 9 підключений входами до датчиків 5-8, виходом - до входу АЦП 10, ви ходи АЦП 10 підключені до виводів паралельного порту МК 11. МК 11 виводом ШІМ підключений до ПІК 12, а ПІК 12 своїм виходом - до керуючого входу силового транзистора 2. Суть способу полягає в отакому. 1. Датчики 5-8 вимірюють сигнали, що пропорційні вхідній напрузі Umk; змінним стану фільтра струму дроселя фільтра ILk і вихідній напрузі 0ö ÷ 0 ÷; ÷ 0ø 1/ C - (Rвх + Rnt + RL ) / L 0 æ0 ö æ 0ö ç ÷ ç ÷ BЗ = ç 1/ L÷ ; B P = ç 0÷ ; ç 0 ÷ ç 0÷ è ø è ø æ - 1 / R HC 1/ C 0ö ç ÷ AP = ç - 1/ L - (Rnd + RL ) / L 0 ÷; ç ÷ 0 0 0ø è æ 1 0 - 1ö æ Uвих ö ç ÷ ç ÷ Q = ç 0 0 0 ÷ ; X = ç IL ÷ , ç ÷ ç-1 0 1÷ è ø è UЗ ø U вих k ; струм у навантаження IHk , (для непрямої оцінки опору навантаження RН). 2. По закінченню k-го ПМ сигнали з виходу датчиків по команді МК 11 за допомогою AM 9 почергово підключають на вхід АЦП 10, піддають аналого-цифровому перетворенню. 3. Цифровий код сигналів з виходу АЦП через паралельний порт передають в мікроконтролер 11. 4. По коду сигналу IHk , МК 11 з ПЗП обирає де: Rвх - вхідний опір ІСН, Ом; RL - активний опір дроселя фільтра ІСН, Ом; Rnt, Rnd - опори транзистора і діода ІСН у провідному стані, Ом. Після підстановки отримаємо ОТІ керування транзистором ІСН (тривалість замкнутого стану транзистора або тривалість підключення ДЖ через фільтр до навантаження), яка в (k+1)-й ПМ знаходиться за формулою: d k+1 = K Uk U вих k + KIk ILk + U З K Ik L-1 [U mk - (R вх + R nt - R nd ) ILk ] , коефіцієнти K Uk , K Ik , які розраховані на етапі проектування для різних величин струм у навантаження ІН. 5. МК 11 виконує п'ять операцій множення, три операції додавання і одну операцію ділення по обчисленню цифрового коду ОТІ за формулою: (3) де: K Uk = -[( a1 - b) e a2T - (a2 - b) ea 2T ] /( a1 - a2 ) - коефіцієнт від'ємного ЗЗ по вихідній напрузі ІСН по закінченні K-го ПМ; K Ik = -( ea1T - ea2T ) / L(a1 - a 2 ) - коефіцієнт додатного 33 по струму дроселя фільтра ІСН по закінченні k-го ПМ; a 1, 2 = 0, 5 [b - 1/(RHk C)] ± d k+1 = K Uk U вихk + K Ik I Lk + U З K Ik L-1 [Um k - R IL k ] , де UЗ, L-1, R=(Rвх+Rnt-Rn d) постійні коефіцієнти. 6. Код ОТІ передається в ШІМ мікроконтролера для формування аналогового сигналу керування транзистором 2. 7. ПІК 12 підсилює сигнал з виходу ШІМ і керує транзистором 2. 8. В кожному періоді протягом часу, що дорівнює тривалості імпульсу ШІМ d, транзистор відкритий, а ДЖ через фільтр підключене до навантаження. Протягом часу, що дорівнює Т мінус d, транзистор закритий, а ДЖ відключене від навантаження. Таким чином, здійснюється широтно-імпульсне регулювання і напруга на навантаженні з високою точністю підтримується такою, що дорівнює напрузі завдання імпульсного стабілізатора напруги UЗ. На фігурі зображена функціональна схема імпульсного стабілізатора напруги з ШІМ, де: 1 - джерело вхідної напруги Um; 2 - комутатор 2; 3 - LC-фільтр; 4 - навантаження; ± 0, 5 [b - 1/(RHk C] 2 + 4 [b - 1/(RHk C)] / LC, 1/ c; b=-(Rnd+RL)/L 1/c; R Hk - опір навантаження ІСН по закінченню k-го ПМ, Ом; C – ємність конденсатора фільтра ІСН, Ф; L - індуктивність дроселя фільтра ІСН, Гн; Rnt, Rnd - опір транзистора і діода ІСН у провідному стані. Ом; RL - активний опір дроселя фільтра ІСН, Ом; Rвх - вхідний опір ІСН, Ом; U вих k - ви хідна напруга ІСН по закінченню k-го ПМ, В; ILk - струм дроселя фільтра ІСН по закінченню k-го ПМ, А. 3 31344 5 - датчик напруги ДЖ; 6 - датчик струм у дроселя фільтра ІL; 7 - датчик струм у навантаження IH; 8 - датчик вихідної напруги Uвих; 9 - аналоговий мультиплексор; 10 - аналого-цифровий перетворювач; 11 - мікроконтролер вирахування ОТІ із зовнішнім ПЗП; 12 - підсилювач імпульсів керування. Застосування цього способу керування дозволяє підвищити динамічні характеристики перетворювача при збереженні стійкості процесу регулювання вихідних параметрів. Це дає можливість ви користовувати ці перетворювачі для живлення різних, в тому числі нелінійних навантажень. Джерела інформації: 1. Патент № 11286 (Україна). МПК Н02М3/156. Спосіб керування імпульсним перетворювачем / О.В. Пузаков, Г.Б Остапчук, Т.Б. Остапчук. – Надруковано 25.12.1996. Бюл. № 4. 2. Транзисторные преобразователи с улучшенной электромагнитной совместимостью / А.К. Шидловский, А.В. Козлов, Н.С. Комаров, Г.А. Москалеyко. - Киев: Наукова думка, 1993. - С. 246. 3. Кунцевич В.М., Лычак М.М. Синтез систем автоматического управления с помощью функций Ляпунова. - М.: На ука, 1979. - С. 61. Фіг. __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2002 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 35 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 4
ДивитисяДодаткова інформація
Назва патенту англійськоюPulse-width modulation method for pulse converter control
Автори англійськоюPeterchuk Serhii Oleksandrovych
Назва патенту російськоюШиротно-импульсный способ управления импульсным преобразователем
Автори російськоюПетерчук Сергей Александрович
МПК / Мітки
МПК: H02M 3/04
Мітки: управління, перетворювачем, широтно-імпульсний, спосіб, імпульсним
Код посилання
<a href="https://ua.patents.su/4-31344-shirotno-impulsnijj-sposib-upravlinnya-impulsnim-peretvoryuvachem.html" target="_blank" rel="follow" title="База патентів України">Широтно-імпульсний спосіб управління імпульсним перетворювачем</a>
Спосіб керування імпульсним перетворювачем
Номер патенту: 11286
Опубліковано: 25.12.1996
Автори: Остапчук Анна Борисовна, Остапчук Тетяна Борисовна, Пузаков Олександр Володимирович
МПК: H02M 3/04
Мітки: перетворювачем, керування, імпульсним, спосіб
Формула / Реферат:
Способ управлення импульсным преобразователем, содержащим коммутатор и фильтр, состоящий в том, что формируют сигнал задания, измеряют переменные состояния фильтра, формируют управляющее воздействие и осуществляют управление коммутатором, отличающийся тем, что управляющее воздействие формируют путем суммирования сигнала задания и сигналов, пропорциональных переменным состояния фильтра, а управление коммутатором осуществляют по знаку...
Багатофункціональний широтно-імпульсний модулятор
Номер патенту: 2062
Опубліковано: 20.12.1994
Автори: Кизилов Володимир Улянович, Максимов Вадим Михайлович, Баранов Олександр Миколайович
МПК: H03K 7/00
Мітки: модулятор, широтно-імпульсний, багатофункціональний
Формула / Реферат:
Многофункциональный широтно-импульсный модулятор, содержащий интегратор на операционном усилителе, вход которого соединен с входной шиной, компаратор на операционном усилителе, отличающийся тем, что, с целью повышения точности, выход интегратора через первый и второй встречно включенные стабилитроны подключен к неинвертирующему входу компаратора, который через первый резистор подключен к общей шине, выход компаратора через третий и...
Адресний пристрій синхронізації фазоманіпульованої m – розрядної імпульсної послідовності та перетворення її в широтно-імпульсний сигнал
Номер патенту: 22634
Опубліковано: 17.03.1998
Автори: Лагутін Михайло Федорович, Резник Володимир Матвійович
Мітки: сигнал, синхронізації, розрядної, послідовності, адресний, перетворення, фазоманіпульованої, широтно-імпульсний, пристрій, імпульсної
Формула / Реферат:
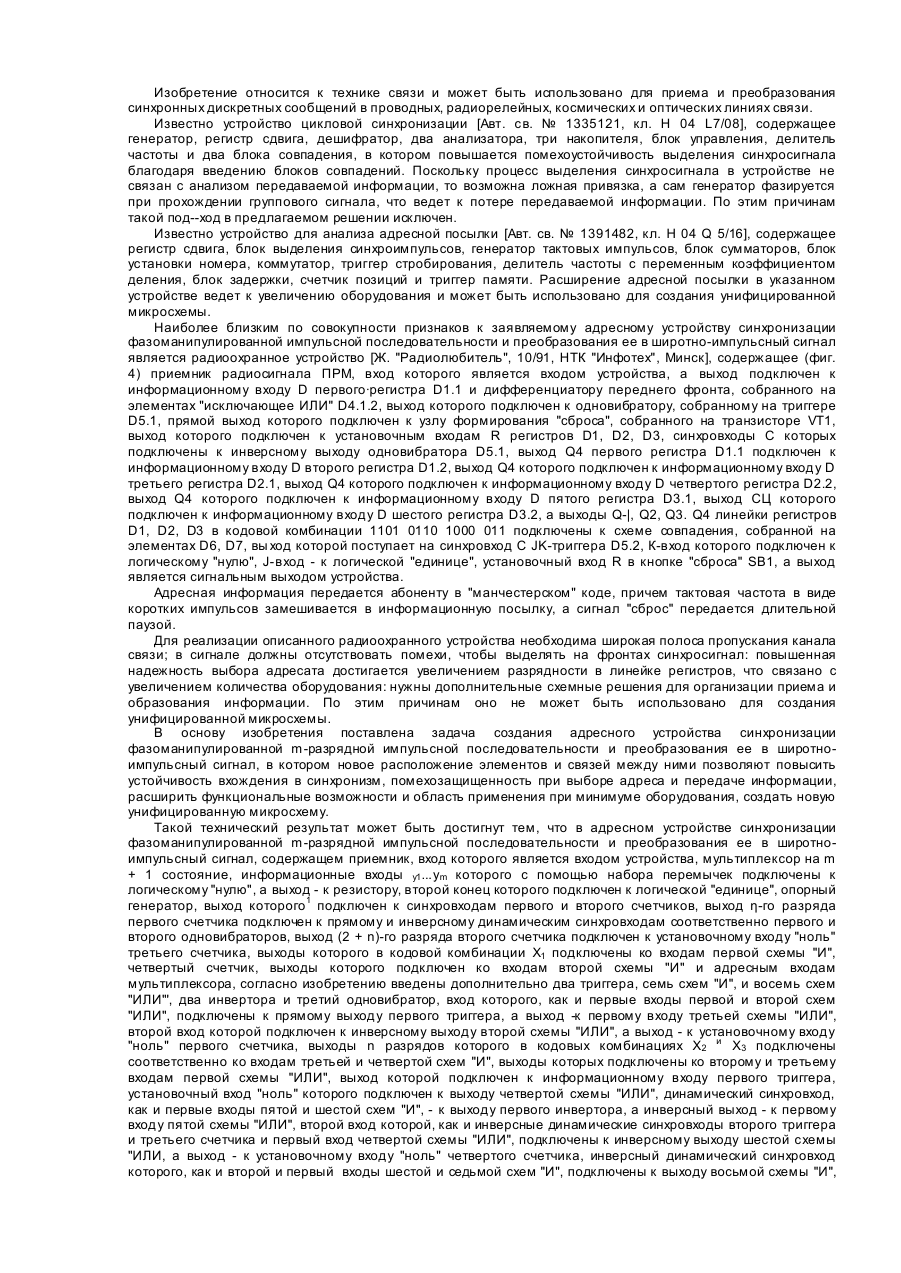
Адресное устройство синхронизации фазоманипулированной m-разрядной импульсной последовательности и преобразования ее в широтно-импульсный сигнал, содержащий приемник, вход которого является входом устройства, мультиплексор на m + 1 состояние, информационные входы y1...ym которого с помощью набора перемычек подключены к логическому "нулю", а выход - к резистору, второй конец которого подключен к логической "единице",...
Обладнання до управління м-фазним вентильним перетворювачем
Номер патенту: 8579
Опубліковано: 30.09.1996
Автори: Коляндр Ісаак Львович, Клойз Наум Борисович, Єремеєв Олександр Борисович, Гінзбург Олександр Костянтинович, Петрик Євген Борисович, Жемеров Георгій Георгійович
МПК: H02M 7/12
Мітки: перетворювачем, управління, обладнання, м-фазним, вентильним
Формула / Реферат:
Устройство для управления m-фазным вентильным преобразователем, содержащее генератор импульсов, распределитель импульсов, выходы которого используются в качестве выходов устройства, последовательно соединенные цифро-аналоговый преобразователь и RC-фильтр, выход которого соединен с первым входом компаратора, второй вход которого используется для подачи сигнала управления, одновибратор, вход которого соединен с выходом элемента И, первый...
Пристрій для управління багатоланковим перетворювачем постійної напруги
Номер патенту: 4698
Опубліковано: 28.12.1994
Автори: Світельський Олексій Леонідович, Пономарев Ігор Григорович, Волков Ігор Володимирович, Гранкін Андрій Вікторович, Білокриницький Микола Степанович, Мясніков Олександр Геннадійович
МПК: H02M 3/335
Мітки: управління, пристрій, напруги, багатоланковим, постійної, перетворювачем
Формула / Реферат:
(57) 1. Устройство для управления многоячейковым преобразователем постоянного напряжения, выполненным в виде N силовых ячеек, каждая из которых содержит транзисторный ключ и LCD-фильтр, содержащее датчик тока, потенциальный вывод которого предназначен для соединения с соответствующим выводом N силовых ячеек, а нулевой вывод - с общей шиной питания, генератор импульсов, выходной вывод которого подключен к управляющему входу триггера, выход...
Попередній патент: Стабілізований перетворювач напруги
Наступний патент: Радіолокатор
Випадковий патент: Вакуумний пристрій "помпіл" для внутрішньом'язових і підшкірних ін'єкцій