Пристрій для вимірювання і контролю параметрів вібрації машин
Номер патенту: 32472
Опубліковано: 15.12.2000
Автори: Клявлін Валерій Володимирович, Немчин Олександр Федорович
Текст
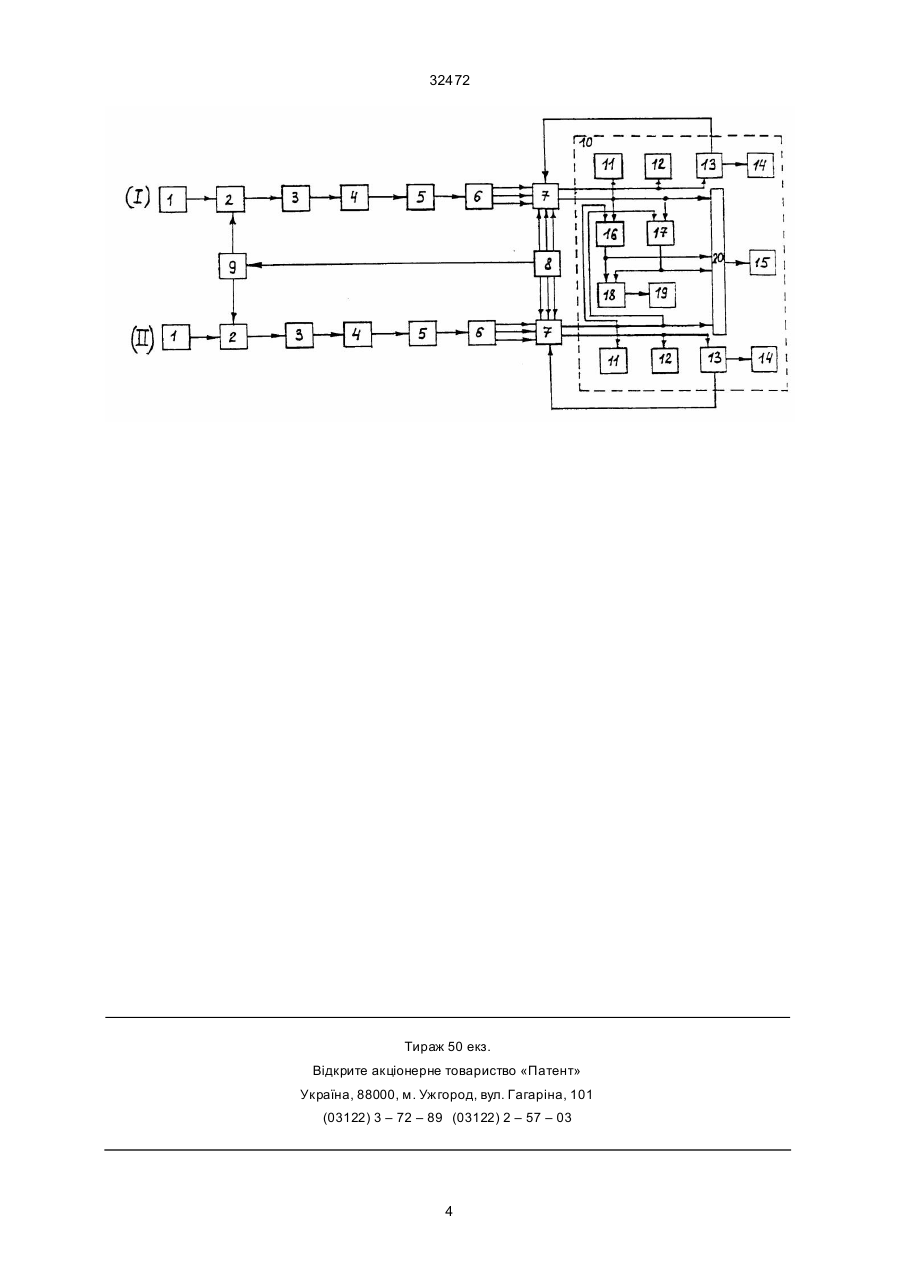
1. Пристрій для вимірювання і контролю параметрів вібрації машин, що містить два вимірювальних канали, кожен із яких включає послідовно з'єднані віброперетворювач, масштабуючий підсилювач і смуговий фільтр, блок порівняння і блок логіки, інші вхо ди якого підключені до вихо дів блока живлення, а виходи блока логіки підключені до вхо дів блока індикації, вимірювання і керування, що включає в себе для кожного каналу блок попереджувальної сигналізації, блок аварійної сигналі 32472 при діагностиці і контролі параметрів просто рової вібрації. В основу ви нахо ду поставлена задача розширення функціональних можливостей пристрою для використання його як при вимірюваннях, так і при діагностиці і контролі параметрів вібрації машин, а та кож підвищення якості обробки сигналу, точності і достовірності ви мірів. Поставлена задача вирішується тим, що пристрій додатково забезпечений інтегратором, блоком усереднення і блоком внутрішнього контролю, ви ходи якого підключені до входів підсилювачів, а вхід - до одного з вихо дів блока живлення, вхід інтегратора підключений до вихо ду смугового фільтру, а ви хід - до входу блока усереднення, вихід якого підключений до вхо ду бло ка порівняння. Поставлена задача вирішується також тим, що блок індикації і керування додатково забезпечений суматором, блоком віднімання, фазовим детекто ром, вимірювачем зсуву фаз, ви мірювачем амплітуд і комута тором, вхо ди якого підключені до вихо дів сумато ра, блока віднімання, фазового детекто ра і блоків логіки, а вихід - до входу ви мірювача амплітуд, входи суматора і блока віднімання підключені до виходів блоків логіки, вихо ди суматора і блока віднімання з'єднані з вхо дами фазового детектора, до вихо ду якого підключений вимірювач зсуву фаз. Таке виконання пристрою розши рює його функціональні можливості, то му що дозволяє використовувати його як для вимірів, так і для діагности ки і контролю машин і меха нізмів у процесі їхн ьої експлуа тації, а та кож підвищує точність і достовірність вимірів. На кресленні показана блок-схема запропонованого пристрою для вимірювання і контролю параметрів вібрації машин. Пристрій містить два вимірювальних канали (І і II), кожний із яких включає послідовно з'єднані віброперетворювач 1, масштабуючий підсилювач 2, смуговий фільтр З, інтегратор 4, блок усереднення 5, блок порівняння 6, блок логіки 7. Блок порівняння 6 виконаний по відомій схе мі у вигляді трьох граничних елементів (на кресленні не показано), що мають відповідно рівні спрацьовування, що відповідають: попереджувальній сигналізації, аварійній ситуації і ситуації, при якій у випадку мінімальної амплітуди сигналу з віброперетворювача 1 на його вихо ді є присутнім сигнал, що надхо дить на вхід блока логіки 7 (тобто трьом граничним елементам відповідають три вихо ди блока порівняння 6) [2]. Блок логіки 7 також виконаний по відомій схе мі блокування сигналів попереднього й аварійного захисту при несправностях, що ви никають у блоках пристрою, і виконаний, наприклад, у вигляді послідовно сполучених першої схе ми збігання, схе ми затримки, другої схе ми збігання, тригера, третьої схеми збігання і інвертора (на кресленні не показано) [2]. Виходи блока живлення 8 підключені до входів блока логіки 7 і входу бло ка внутрішнього контролю 9, ви конаного, наприклад, у вигляді генератора з каліброваним сигналом. Виходи блока внутрішнього контролю 9 підключені до одного з входів підсилювача 2, а вхід - до одного з вихо дів блока живлення 8. Виходи блока логіки 7 підключені до вхо дів блока індикації, вимірювання і керування 10. Блок індикації, вимірювання і керування 10 містить у со бі: блок попереджувальної сигналізації 11, блок аварійної сигналізації 12, блок затримки 13, що ви конаний у вигляді послідовно сполучених схеми затримки і тригера (на кресленні не показано), один вихід якого сполучений з одним із вхо дів блока логіки 7, а другий - із вхо дом блока захисту 14. Крім того, блок індикації, вимірювання і керування 10 додатково забезпечений вимірювачем амплітуд 15, суматором 16, блоком віднімання 17, фа зовим детектором 18, вимірювачем зсуву фаз 19 і комутатором 20, входи якого підключені до вихо дів суматора 16, блока віднімання 17, фазового детектора 18 і блоків логіки 7, а вихід - до входу вимірювача зсуву фаз 19. Входи суматора 16 і блока віднімання 17 підключені до виходів блоків логіки 7 обох каналів І і ІІ, ви хо ди суматора 16 і блока віднімання 17 з'єднані з входами фазового детектора 18, до вихо ду якого підключений вимірювач зсуву фаз 19. Пристрій працює таким чином. Віброперетворювач 1 вста новлюють у двох точках досліджуваного вузла машини. Напрямок осі чутливості віброперетворювачів 1 визначається напрямком поступальних і кутових коливань, що вимірюються. Роблять попереднє роздільне калібрування і контроль коефіцієнта підсилення і коефіцієнта передачі каналів І і ІІ шля хом вироблення відповідних сигналів у блоці внутрішнього контролю 9. Причому калібрування роблять як на початку, так і наприкінці вимірів, тобто введення і функціональні зв'язки цього блока 9 дозволяє підвищи ти надійність роботи, а також точність і досто вірність вимірів пристрою в цілому. Після цього сигнал через підсилювачі 2 надхо дить на входи смугових фільтрів 3. Параметри фільтрів 3 для обох каналів однакові. Частота настроювання фільтрів 3 відповідає частоті збуреного навантаження (частоті обертання вала й ін.). З вихо ду фільтрів 3 сигнал надхо дить на входи інтегратора 4, який перетворює сигнал вібродатчика 1, що пропорційний віброприскоренню, у сигнал, що пропорційний віброшвидкості, який далі надходить на вхід блока усереднення 5. Блок усереднення 5 забезпечує одержання постійної напруги, пропорційної віброшвидкості. Час усереднення обирається на підста ві аналізу імпульсного ха рактеру вібропроцесів для виключення помилкових сп рацьовувань системи захисту пристрою. Такий взаємозв'я зок і виконання введених в пристрій елементів 4 і 5 сприяє підвищенню якості обробки вібросигналу. З вихо ду блока усереднення 5 сигнал надходить на вхід бло ка порівняння 6. Блок порівняння 6 виконаний по відомій схемі у вигляді трьох граничних елементів (не показаних на кресленні), що мають відповідно рівні спрацьовування, які відповідають попереджувальній сигналізації (перший граничний елемент), аварійній ситуа ції (другий граничний елемент) і ситуа ції, при якій у випадку мінімальної амплітуди сигналу з віброперетворювача 2 32472 1 на його вихо ді є присутнім сигнал, що надхо дить на вхід бло ка логіки 7 (третій граничний елемент). При обриві кабелю віброперетворювача 1 сигнал на виході третього граничного елемента блока б відсутній, блокуються схеми збігання блока логіки 7, як і робота всього пристрою. Аналогічно відбувається робота при відсутності хоча б однієї з вихідних напруг блока живлення 9. При досягненні амплітуди сигналу з віброперетворювача 1, що відповідає рівню аварійної сигналізації, сигнал другого граничного елемента блока порівняння 6 через схему збігання при наявності всіх інших сигналів запускає схему затримки блока логіки 7, що використовується для запобігання помилковим спрацьовуванням системи аварійного захисту. Ці затримки грають істотну роль при короткочасних неста ціонарних змінах режимів роботи машин (компресорів). Час затримки обирається таким, щоб короткочасні підвищення амплітуди вібрації, а також імпульсні перешкоди не призводили до спрацьовування схем попереджувальної й аварійної сигналізації. Якщо дійсно з'являється стійкий сигнал на вихо ді другого граничного елемента блока логіки 7, то відбувається збіг сигналів на входах схеми збігання блока логіки 7, і її вихідний сигнал перекидає тригер у "одиничний" стан. При цьому є присутнім сигнал аварійної сигналізації в блоці 12. Вихідний сигнал тригера затримується в блоці затримки 13 за допомогою схе ми затримки (на кресленні не показано) на час, необхідний оператору для ухвалення рішення. Якщо сигнал аварійного захисту не блокується оператором, то вихідний сигнал останньої схеми затримки перекидає тригер блока затримки 13 у "одиничний" стан (на кресленні не показано). Тобто формується сигнал аварійного захисту, що надхо дить на вхід блока захисту 14. Аналогічним чином працює канал попереджувальної сигналізації, при цьому є присутнім сигнал попереджувальної сигналізації в блоці 11. Таким чином, сигнали попередження й аварії пропускаються через блоки логіки 7 тільки при надходженні всіх сигналів, що підтверджують нормальний стан усіх функціональних блоків пристрою. При "нормальній" ситуації, тобто при відсутності аварійного сигналу з блоку 12, сигнали, які пропорційні сумі і різниці коливань, надхо дять відповідно із суматора 16 і блока віднімання 17 на вхо ди фазового детектора 18. Фазовий детектор 18 перетворює фазовий зсув між цими сигналами в постійну напругу, знак якої визначає напрямок, а розмір – значення фазового зсуву. Вимір значень амплітуд вібрації здійснюється за показниками вимірювача амплітуди 15, а вимір значень різниці фаз між гармоніками поступальних і кутових коливань – за допомогою вимірювача зсуву фаз 19. В результаті запропонованого виконання і зазначеного взаємозв'язку еле ментів 15, 16, 17, 18,19,20 блоку індикації, вимірювання і керуван ня 10 запропонованого пристрою можливо проведення таких вимірів параметрів вібрації машин: амплітуди поступальної складової гармонійних просто рових коливань в обраному напрямку (стосовно заданої точки вузла, в якій вибирається початок координат): амплітуди кутови х малих коливань в обраній площині; зсуву фаз між гармоніками поступальних і к утових коливань на обраній часто ті. Вимір різниці фаз дозволяє діагностувати перекоси і неспіввісність валів у підшипниках, судити про розмір і напрямок моментних на вантажень, визначити кут повороту конструкції в момент найбільшого відхилення від положення рівноваги. Таким чином, введення нових елементів 4,5,9,15,16,17,18,19 і нових функціональних зв'язків у запропонова ний пристрій забезпечує: • розши рення функціональних можливостей і підвищення надійності пристрою при спільному застосуванні його як для вимірів, так і для діагностики і контролю машин і меха нізмів у процесі їхньої експлуатації; • підвищення точності і досто вірності вимірів; • підвищення якості обробки сигналу; • контроль коефі цієнтів передачі каналів і самоконтроль пристрою; • ви мір амплітуди поступальної складової гармонійних просторових коливань в обраному напрямку (стосовно заданої точки вузла, у якій вибирається початок координат); • вимір амплітуди кутових малих коливань в обраній площи ні; • ви мір зсуву фаз між гармоніками поступальних і куто вих коливань на обраній частоті; • захист від імпульсних перешкод і несправностей у блоках пристрою і, отже, підвищує надійність його функціонування; • упереджуючий й аварійний захист від вібрації небезпечного рівня. Запропонований пристрій може знайти застосування в системі вібровимірювань, діагностики і захисту технологічного устаткування, машин і агрегатів від вібраційних перевантажень. 3 32472 Тираж 50 екз. Відкрите акціонерне товариство «Патент» Україна, 88000, м. Ужгород, вул. Гагаріна, 101 (03122) 3 – 72 – 89 (03122) 2 – 57 – 03 4
ДивитисяДодаткова інформація
Назва патенту англійськоюAppliance for measurement and control of vibration parameters of machines
Назва патенту російськоюУстройство для измерения и контроля параметров вибрации машин
МПК / Мітки
МПК: G01M 7/02
Мітки: вимірювання, параметрів, контролю, пристрій, вібрації, машин
Код посилання
<a href="https://ua.patents.su/4-32472-pristrijj-dlya-vimiryuvannya-i-kontrolyu-parametriv-vibraci-mashin.html" target="_blank" rel="follow" title="База патентів України">Пристрій для вимірювання і контролю параметрів вібрації машин</a>
Пристрій для вимірювання параметрів вібрації машин
Номер патенту: 19897
Опубліковано: 25.12.1997
Автори: Поліщук Олег Федорович, Бойко Михайло Васильович, Божко Олександр Євгенович, Саприкін Сергій Олексійович
МПК: G01M 7/02
Мітки: пристрій, вібрації, параметрів, машин, вимірювання
Текст:
...между осями вибропреобразователей 1. Параметр А характеризует амплитуду малых угловых колебаний и измеряется устройством с помощью измерителя 4. Поступательные колебания S(t) с частотой f (в направлении осей вибропреобразователей 1) точки С (не показана) , расположенной между вибропреобразователями 1 на расстоянии 1/2 от каждого из них, приближенно определяются формулой S(t) = | [ s t ( t ) + S 2 (t)] = - Bcos(Ut где 1 В = ^ ^ + A^cosq»,)...
Пристрій для дистанційного контролю параметрів деталей машин, що обертаються
Номер патенту: 27177
Опубліковано: 15.08.2000
Автори: Ковальов Олександр Іванович, Гончар Михайло Петрович
Мітки: деталей, обертаються, контролю, дистанційного, пристрій, параметрів, машин
Формула / Реферат:
Формула изобретения Устройство для дистанционного контроля параметров врящающихся деталей машин, содержащее свето излучатель, располагаемый на вращающейся детали, и неподвижный светоприемник, оптически согласованные через световод, выполненный в виде кольца, наружная цилиндричеекая поверхность которого расположена симметрично относительно оси вращения вала, а внутренняя поверхность очерчена витком архимедовой спирали, концы которой...
Пристрій для вимірювання вібрації та переміщень
Номер патенту: 395
Опубліковано: 30.04.1993
Автори: Вова Микола Іванович, Квашин Михайло Федорович, Меншиков Сергій Миколайович, Метельов Леонід Дмитрович, Цибулько Вадим Йосипович, Зорін Олександр Сергійович
МПК: G01B 7/00, G01H 11/00
Мітки: вібрації, вимірювання, пристрій, переміщень
Формула / Реферат:
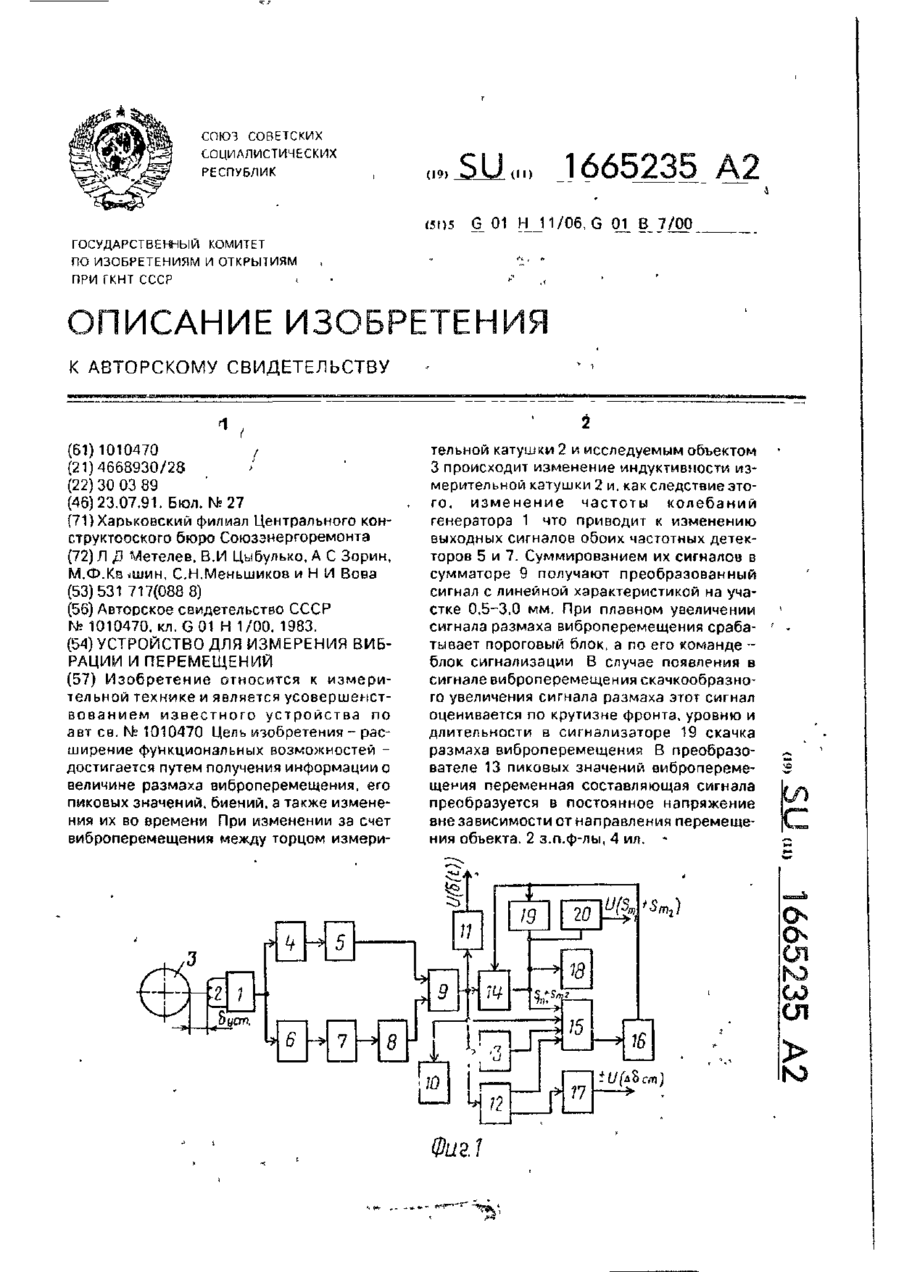
Формула изобретения1. Устройство для измерения вибрации и перемещений по авт. св. №1010470, отличающееся тем, что, с целью расширения функциональных возможностей за счет получения информации о величине размаха виброперемещения, его пиковых значениях, биениях, а также их изменении во времени, оно снабжено подключенными к выходу сумматора нормирующим блоком сигнала виброперемещения, преобразователем относительного статического...
Пристрій для контролю вібрації підшипників кочення
Номер патенту: 5876
Опубліковано: 29.12.1994
Автори: Корсун Віктор Євгенович, Поліщук Олег Федорович, Божко Олександр Євгенович, Бєлих Володимир Іванович
МПК: H03K 23/00, G01H 1/00
Мітки: підшипників, пристрій, кочення, вібрації, контролю
Формула / Реферат:
Дизельная форсунка, содержащая полый корпус с каналами подвода топлива, подвода и слива гидрозапорной жидкости, закрепленный на корпусе полый распылитель с сопловыми отверстиями, штангу, запорную иглу, размещенную в полости распылителя с образованием подыгольной и надыгольной камер, нагруженный через штангу поршень гидропривода, установленный со стороны надыгольной камеры с образованием рабочей и надпоршневой полостей и жестко связанный...
Пристрій для контролю параметрів стрілових кранів
Номер патенту: 367
Опубліковано: 19.07.1999
Автори: Столбиков Станіслав Григорійович, Кузвесов Віктор Георгійович, Андрієнко Миколай Миколайович, Усанов Володимир Миколайович
МПК: B66C 23/90
Мітки: кранів, стрілових, параметрів, контролю, пристрій
Формула / Реферат:
Пристрій для контролю параметрів стрілових кранів, що містить корпус Із розташованими в ньому аналого-цифровим перетворювачем, цифровим обчислювальним ! цифровим запам'ятовуючим блоками, виконаними у вигляді плати, встановленої паралельно одній зі сторін корпуса, датчики аналогових І дискретних параметрів І сигналів крана, розташовані поза корпусом, причому один з Інформаційних входів цифрового обчислювального блока з'єднаний Із виходом...
Попередній патент: Спосіб очистки внутрішньої поверхні газопроводу
Наступний патент: Засіб від алкогольної та наркотичної залежності
Випадковий патент: Ультразвуковий активатор-змішувач