Спосіб визначення залишкового дисбалансу тягових електродвигунів безкорпусного виконання екіпажної частини рухомого складу
Номер патенту: 34973
Опубліковано: 26.08.2008
Автори: Ковальов Олександр Юхимович, Карпенко Володимир Владиславович, Іванов Віктор Олексійович
Формула / Реферат
1. Спосіб визначення залишкового дисбалансу роторів тягових електродвигунів безкорпусного виконання екіпажної частини рухомого складу, який полягає у тому, що надають обертання ротору в складі тягового електродвигуна і фіксують його віброшвидкість, який відрізняється тим, що як радіальне переміщення використовують радіальний зазор у підшипнику, рівень залишкового дисбалансу ротора вимірюють з урахуванням дії відцентрових сил, масових і жорсткісних характеристик статора двигуна, інерційних і геометричних параметрів ротора, радіального зазору в підшипниках та визначають з використанням такої залежності:
![]() ,
,
де ![]()
![]()
![]() ;
;
![]() - радіальний зазор у підшипнику;
- радіальний зазор у підшипнику;
n - частота обертання ротора;
![]() - постійні коефіцієнти, чисельні значення яких залежать від масових і жорсткісних характеристик статора електродвигуна та інерційних і геометричних параметрів ротора конкретного типу електродвигуна екіпажної частини рухомого складу;
- постійні коефіцієнти, чисельні значення яких залежать від масових і жорсткісних характеристик статора електродвигуна та інерційних і геометричних параметрів ротора конкретного типу електродвигуна екіпажної частини рухомого складу;
![]() - середнє квадратичне значення віброшвидкості для точок (Т) електродвигуна.
- середнє квадратичне значення віброшвидкості для точок (Т) електродвигуна.
2. Спосіб за п. 1, який відрізняється тим, що встановлення припустимого рівня залишкового дисбалансу ротора тягового електродвигуна проводять по вказаній залежності, де виміряні значення віброшвидкості за трьома напрямками, зі сторони, протилежної приводу, та зі сторони приводу тягового електродвигуна заміняють його максимально припустимими значеннями за стандартом.
Текст
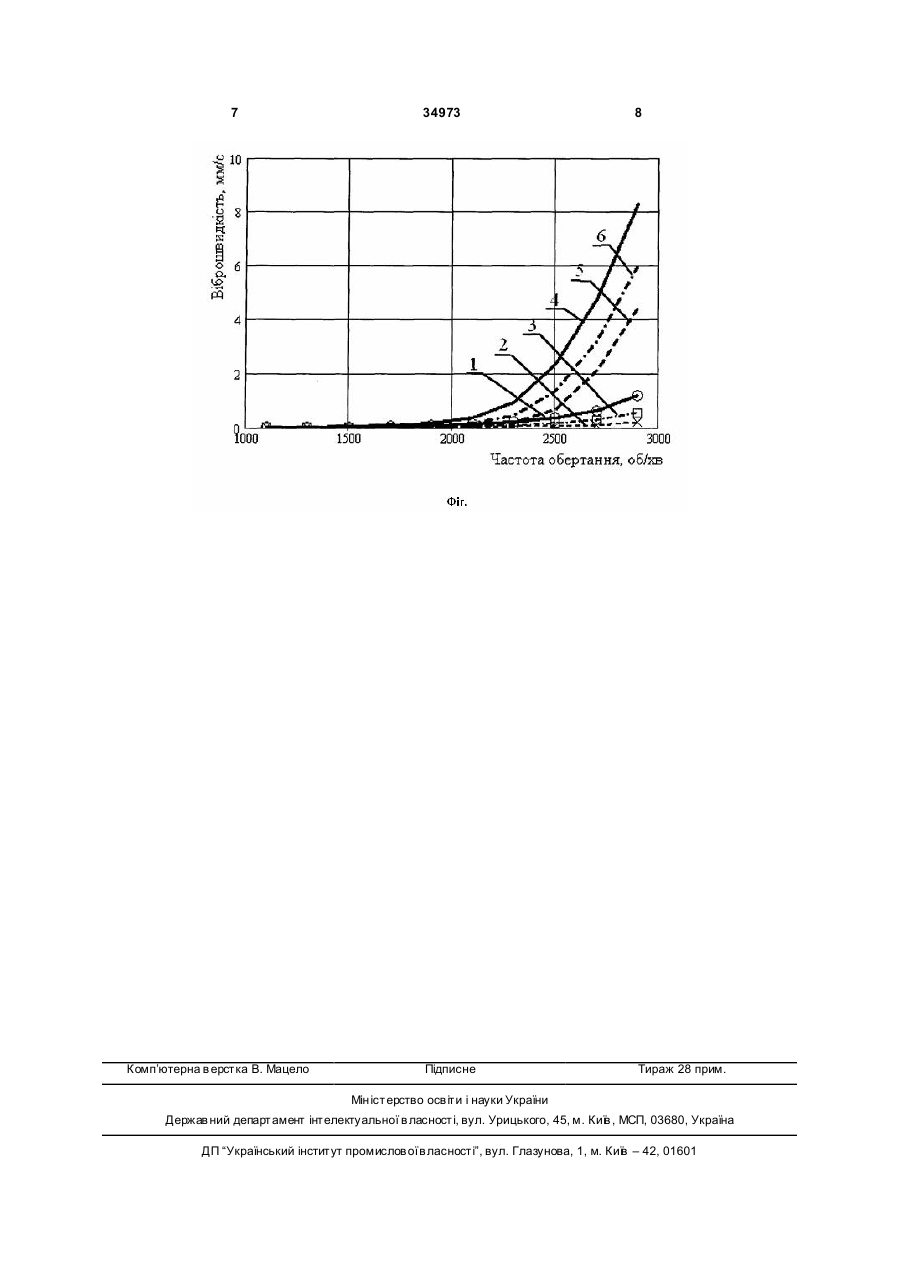
1. Спосіб визначення залишкового дисбалансу роторів тягових електродвигунів безкорпусного виконання екіпажної частини рухомого складу, який полягає у тому, що надають обертання ротору в складі тягового електродвигуна і фіксують його віброшвидкість, який відрізняється тим, що як радіальне переміщення використовують радіальний зазор у підшипнику, рівень залишкового дисбалансу ротора вимірюють з урахуванням дії відцентрових сил, масових і жорсткісних характеристик статора двигуна, інерційних і геометричних параметрів ротора, радіального зазору в підшипниках та визначають з використанням такої залежності: 2 3 34973 4 пам'яті, цифро-аналоговим перетворювачем, вихід ра двигуна, інерційних і геометричних параметрів якого з'єднаний з другим входом аналогового суротора, радіального зазору в підшипниках та виматору, блоком відображення, блоком порівняння, значають з використанням такої залежності: який за допомогою зворотного зв'язку з'єднаний з 2 T 1 - B (T ) + B (T ) - 4 × A (T) × C ( ) блоком пам'яті. D= × Ще одним недоліком цього способу є низька 2 A (T ) достовірність і інформативність визначення дис2 2 балансу ротора, що обумовлене необхідністю наде A (T) = å d k × å ni × c (T ) ; r i,2,k несення міток на ротор двигуна спочатку першої k =0 i =0 мітки, а потім другої з зсувом 90°. Для отримання 2 2 достовірних результатів вимірювання дисбалансу ( T) B(T ) = å dk × å ni ×c i,1,k ; r ротору точність нанесення міток на роторі по відk =0 i =0 ношенню одна від одної повинна бути високою, що 2 2 ускладнює увесь процес в цілому. ~ C (T ) = å dk × å ni × c (T ) - V (T ) r Відомий спосіб визначення допустимого залиi,1k , k =0 i=0 шкового дисбалансу ротора тягового електродвиdr - радіальний зазор у підшипнику; n - частогуна (ТЕД) корпусного виконання [Машины и технологическое оборудование. Система классов ) та обертання ротору; ci(Tk - постійні коефіцієнти, точности. Основные положения. ГОСТ 22061-76 и , j, методические указания]. чисельні значення яких залежать від масових і Недолік цього способу в тому, що він не вражорсткостних характеристик статору електродвиховує особливості безкорпусних конструкцій ТЕД. гуна та інерційних і геометричних параметрів роАсинхронні тягові електродвигуни мають, як пратору конкретного типу електродвигуна екіпажної вило, "безкорпусне виконання" [див. "Тяговые эле~ частини рухомого складу; V(T ) - середнє квадрактродвигатели электровозов" В.И. Бочаров, В.И. тичне значення віброшвидкості для точок (Т) елекЗахаров, Л.Ф. Коломейцев и др., изд. Агентство тродвигуна. Наутилус, 1998г., стр.183, п.3], тобто корпусом є Відповідно до окремого варіанту здійснення магнітопровід, який може бути виконаний із листа способу, під час встановлення припустимого рівня сталі, а може бути і шихто ваним (так зване, "беззалишкового дисбалансу [D] ротора тягового елеккорпусне виконання"). тродвигуна як критерій для обґрунтованого його Найбільш близьким до корисної моделі, що вибору в приведеній залежності замість вимірянозаявляється, за технічною суттю, призначенням і го рівня віброшвидкoсті точок тягового електрорезультатом, що досягається є спосіб визначення двигуна використовуються максимально припусдопустимого залишкового дисбалансу ротора тятимі рівні віброшвидкості встановлені стандартом гового електродвигуна безкорпусного виконання [ГОСТ 20815. Машины электрические вращающи[Патент України №28461 від 10.12.2007р.], який еся. Механическая вибрация некоторых видов полягає в тому, що надають обертання ротору в машин с высотой оси вращения 56мм и более. складі тягового електродвигуна і фіксують його Измерение, оценка и допустимые значения]. віброшвидкість. Всі вимоги до балансування і меПричинно-наслідковий зв'язок між сукупністю тодів розрахунку дисбалансів вибирають відповідознак корисної моделі і результатом, що досягано до державного стандарту, при цьому клас точється, полягає в наступному. ності балансування роторів ТЕД безкорпусного Розширення області використання способу виконання вибирають на клас нижче класу точносдосягається завдяки можливості визначення закоті балансування роторів ТЕД корпусного виконанномірностей впливу конструкційного виконання ня. електродвигунів на його динамічні характеристики Недоліком цього відомого способу є низька для різних типів двигунів екіпажної частини рухоточність та обмеженість використання в зв'язку з мого складу. Шляхом спектральної вібродіагноститим, що всі ТЕД безкорпусного виконання екіпажки можливе одержання даних про рівень та спектної частини рухомого складу охарактеризовані ральний склад власної вібрації електродвигуна одним класом (двигуни безкорпусного виконання) безкорпусного виконання. Завдяки використанню и не враховуються суттєві відмінності двигунів способу встановлено, що підвищена вібрація в всередині класу по масовим і жорсткостним харакосьовому напрямку ТЕД визначається динамічнитеристикам статора двигуна, інерційним і геометми радіальними силами в підшипниковому вузлі. ричним параметрам ротора та радіальному зазору Коефіцієнти лінійної кореляції середніх квадратичв підшипниках. них значень віброшвидкостей в осьовому напрямВ основу корисної моделі поставлена задача ку та у вертикальному і поперечному напрямках підвищення точності визначення залишкового дорівнюють 0.81 і 0.64 відповідно. дисбалансу роторів двигунів, а також задача розПідвищення точності визначення дисбалансу ширення області використання способу для різних роторів двигунів Балансування роторів у складі типів двигунів екіпажної частини рухомого складу. ТЕД є більш достовірними і інформативними, оскіПоставлена задача вирішується тим, що нальки враховують натурне закріплення ротора еледають обертання ротору тягового електродвигуна і ктродвигуна та його кінематичну взаємодію через фіксують його віброшвидкість. Відповідно до корипідшипникові щити із статором двигуна. сної моделі, рівень залишкового дисбалансу ротоКрім того, завдяки використанню способу дора D вимірюють з урахуванням дії відцентрових сягається економія матеріальних та трудових ресил, масових і жорсткостних характеристик стато 5 34973 6 сурсів за рахунок зменшення випадків повернення ють радіальний зазор в підшипниках та отримують ТЕД з випробувальних станцій внаслідок підвищезалежності, приведені на Фіг., де: ної вібрації, пов'язаної з дисбалансом ротора. - криві 1, 2, 3, якщо dr=dr mіn ; На Фіг. показаний приклад залежності віброш- криві 4, 5, 6, якщо dr=dr mах; видкості ТЕД в осьовому напрямку зі сторони при- криві 1, 4, якщо D=D max; воду тягового електродвигуна типу АД914 вантаж- криві 2, 5, якщо D=D min; но-пасажирського електровоза. D + Dmin - криві 3, 6, якщо D = max . Спосіб реалізують наступним чином. Спочатку 2 встановлюють ТЕД на стенд для вимірювання Методом найменших квадратів отримують чивласної вібрації та задають йому обертання із чассленні експериментальні значення коефіцієнтів тотою n. На двигуні встановлюють вібродатчики, (T ) , які для ТЕД АД914 мають значення, наведевимірюють віброшвидкість електродвигуна на різc i, j,k них обертах по трьом напрямкам зі сторони проні в таблиці. тилежної приводу та зі сторони приводу, вимірюТаблиця Чисельні значення постійних коефіцієнтів ci(6 ) , j,k Індекс коефіцієнта і=0 і=1 і=2 j=0 j=1 j=2 j=0 j=1 j=2 j=0 j=1 j=2 k=0 15,04 -49848 0,678*107 -0.0227 44,0 5818 0,717*10-5 -0,0096 1,23 На етапі розробки тягового електродвигуна ) коефіцієнти ci(Tk можуть бути отримані розраху, j, нковим методом шляхом побудови скінченоелементної моделі та математичної моделі нелінійних коливань ротора у пружних опорах з урахуванням зазорів підшипнику, жорсткості та маси статора і інерційних та геометричних параметрів ротора. В рамках заявленого способу отримані залежності дисбалансу D від середніх квадратичних ~ значень віброшвидкості V(T ) для точок (Т) тягового електродвигуна. Якщо у вказаній залежності замість виміряних значень віброшвидкості точок ТЕД підставити ~ їх припустимі значення [ V ] за стандартом [ГОСТ 20815], то отримаємо значення максимально припустимому дисбалансу [D] для кожного типу двигунів екіпажної частини рухомого складу. Вказані залежності є критерієм для обґрунтованого вибору залишкового дисбалансу ротора тягового електродвигуна, причому коефіцієнти (T ) визначаються окремо для кожного типу ТЕД c i, j,k з урахуванням його особливостей. Зниження жо k=1 Значення коефіцієнта -9,2*105 0,124*1010 -0.157*1012 1019 -0,109*107 0,134*109 -0,272 235 -28205 k=2 0,1*1011 -0,715*1013 0.852*1015 -0.986*107 0,618*1010 -0,721*1012 2404 -0,132*107 0,151*109 рсткості статора тягового електродвигуна безкорпусного виконання та наявність зазорів у підшипниках призводить до того, що ротор, відбалансований згідно з чинними нормами по залишковому дисбалансу, під дією відцентрових сил рухається по еліптичній траєкторії. Зміна траєкторії руху призводить до появи в підшипниках додаткових динамічних сил, які в 2.4-2.7 разу перевищують їх нормовані значення і як наслідок - до підвищеної вібрації електродвигуна та зниженню ресурсу підшипника в 2,6 рази. Таким чином, у корисній моделі досягається підвищення точності визначення залишкового дисбалансу роторів двигунів, а також розширення області використання способу для різних типів двигунів екіпажної частини рухомого складу. 7 Комп’ютерна в ерстка В. Мацело 34973 8 Підписне Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determination of residual unbalance of traction electric motors of body-less implementation of car section of mobile stock
Автори англійськоюIvanov Viktor Oleksiiovych, Karpenko Volodymyr Vladyslavovych, Kovaliov Oleksandr Yukhymovych
Назва патенту російськоюСпособ определения остаточного дисбаланса тяговых электродвигателей безкорпусного выполнения экипажной части подвижного состава
Автори російськоюИванов Виктор Алексеевич, Карпенко Владимир Владиславович, Ковалев Александр Ефимович
МПК / Мітки
МПК: G01M 15/00, G01M 7/00
Мітки: безкорпусного, частини, тягових, залишкового, екіпажної, виконання, дисбалансу, складу, електродвигунів, спосіб, визначення, рухомого
Код посилання
<a href="https://ua.patents.su/4-34973-sposib-viznachennya-zalishkovogo-disbalansu-tyagovikh-elektrodviguniv-bezkorpusnogo-vikonannya-ekipazhno-chastini-rukhomogo-skladu.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення залишкового дисбалансу тягових електродвигунів безкорпусного виконання екіпажної частини рухомого складу</a>
Спосіб визначення допустимого залишкового дисбалансу ротора тягового електродвигуна безкорпусного виконання
Номер патенту: 28461
Опубліковано: 10.12.2007
Автори: Ковальов Олександр Юхимович, Карпенко Володимир Владиславович
МПК: G01M 7/00
Мітки: тягового, електродвигуна, дисбалансу, спосіб, безкорпусного, виконання, залишкового, ротора, допустимого, визначення
Формула / Реферат:
Спосіб визначення допустимого залишкового дисбалансу ротора тягового електродвигуна (ТЕД) безкорпусного виконання, який включає встановлення класу точності балансування ротора ТЕД безкорпусного виконання, а також виконання вимог до балансування і методів розрахунку дисбалансів за державним стандартом, що і для ротора ТЕД корпусного виконання, який відрізняється тим, що клас точності балансування ротора ТЕД безкорпусного виконання вибирають на...
Пристрій для поточного контролю механічної частини рухомого складу залізниць
Номер патенту: 2290
Опубліковано: 15.01.2004
Автори: Дмитрієв Дмитро Вікторович, Кирпа Георгій Миколайович, Дьомін Юрій Васильович, Дьомін Ростислав Юрійович
МПК: B61K 9/00
Мітки: залізниць, частини, складу, механічної, поточного, пристрій, контролю, рухомого
Формула / Реферат:
Пристрій для поточного контролю механічної частини рухомого складу залізниць, що включає блок виміру вертикальних та горизонтальних віброприскорень кузова одиниці рухомого складу, зв'язаний блоком сполучення з ЕОМ, блок електричного живлення та блок пам'яті, який відрізняється тим, що він обладнаний розташованим на одиниці рухомого складу бортовим реєстратором з блоком контролю поздовжніх віброприскорень, датчик котрого закріплено на рамі...
Пристрій для поточного контролю механічної частини рухомого складу залізниць
Номер патенту: 83459
Опубліковано: 25.07.2008
Автори: Кирпа Георгій Миколайович, Дьомін Юрій Васильович, Дьомін Ростислав Юрійович, Дмитрієв Дмитро Вікторович
МПК: B61K 9/00
Мітки: механічної, частини, складу, контролю, поточного, рухомого, залізниць, пристрій
Формула / Реферат:
Пристрій для поточного контролю механічної частини рухомого складу залізниць, що включає блок виміру вертикальних та горизонтальних віброприскорень кузова одиниці рухомого складу, зв'язаний блоком сполучення з ЕОМ, блок електричного живлення та блок пам'яті, який відрізняється тим, що він, по-перше, обладнаний розташованим на одиниці рухомого складу бортовим реєстратором з блоком контролю поздовжніх віброприскорень, датчик котрого закріплено...
Спосіб визначення рівня залишкового мономера в акрилових пластмасах
Номер патенту: 30637
Опубліковано: 15.12.2000
Автори: Рожко Микола Михайлович, Палійчук Іван Васильович, Шийчук Ірина Андріївна
МПК: C08F 6/00
Мітки: залишкового, акрилових, мономера, пластмасах, визначення, рівня, спосіб
Формула / Реферат:
Спосіб визначення рівня залишкового мономера в акрилових пластмасах, що включає замочування подрібненої пластмасової стружки в розчиннику, екстрагування розчину та визначення залишкового мономера, який відрізняється тим, що як розчинник використовують дистильовану воду, пластмасову стружку замочують впродовж 4 год., а залишковий мономер визначають спектрофотометричним методом.
Система повітропостачання тягових електродвигунів транспортного засобу
Номер патенту: 65205
Опубліковано: 15.09.2006
Автори: Шаповалов Валерій Миколайович, Сеферовський Віктор Миколайович, Козицький Костянтин Костянтинович
МПК: H02K 9/02, B60K 11/00
Мітки: тягових, засобу, система, електродвигунів, транспортного, повітропостачання
Формула / Реферат:
Спосіб одержання мисливського пороху, що включає одержання порохових зерен, графітування, відокремлення порохового пилу, графіту, сортування за розмірами, сушіння і змішання, який відрізняється тим, що відокремлення порохового пилу, графіту і сортування пороху за розмірами здійснюють у направленому знизу вверх повітряному потоці, організованому у вертикальному зиґзаґоподібному каналі сепаратора, а для відокремлення великих частинок при...