Інерційний планетарний трансформатор моменту

Формула / Реферат
1. Інерційний планетарний трансформатор моменту з ведучим водилом, веденим центральним колесом, по меншій мірі двома сателітами з підпружиненими з можливістю переміщення в одній з діаметральних площин сателіту і по одну сторону від осі відповідного сателіту дебалансами, який відрізняється тим, що дебаланси підпружинені на водилі.
2. Трансформатор моменту по п. 1, який відрізняється тим, що принаймні одна з пружин орієнтації дебалансу кожного сателіту зв'язана з водилом через коректор, який виконаний з можливістю зміщення центру орієнтації дебалансу.
3. Трансформатор моменту по п. 2, який відрізняється тим, що коректор включає кулачковий механізм, двосторонній кулачок якого жорстко закріплений на валі сателіту, а важіль кінематично зв'язаний з водилом.
4. Трансформатор моменту по п. 3, який відрізняється тим, що він обладнаний для кожного сателіту коромислом, шарнірно зв'язаним з водилом і важелем кулачкового механізму, а також підпружиненим на водилі відцентровим грузом, який жорстко з'єднаний з коромислом.
5. Трансформатор моменту по п. 1, який відрізняється тим, що він обладнаний для кожного сателіту кулачковим механізмом, який включає двосторонній кулачок на валі сателіту.
Текст
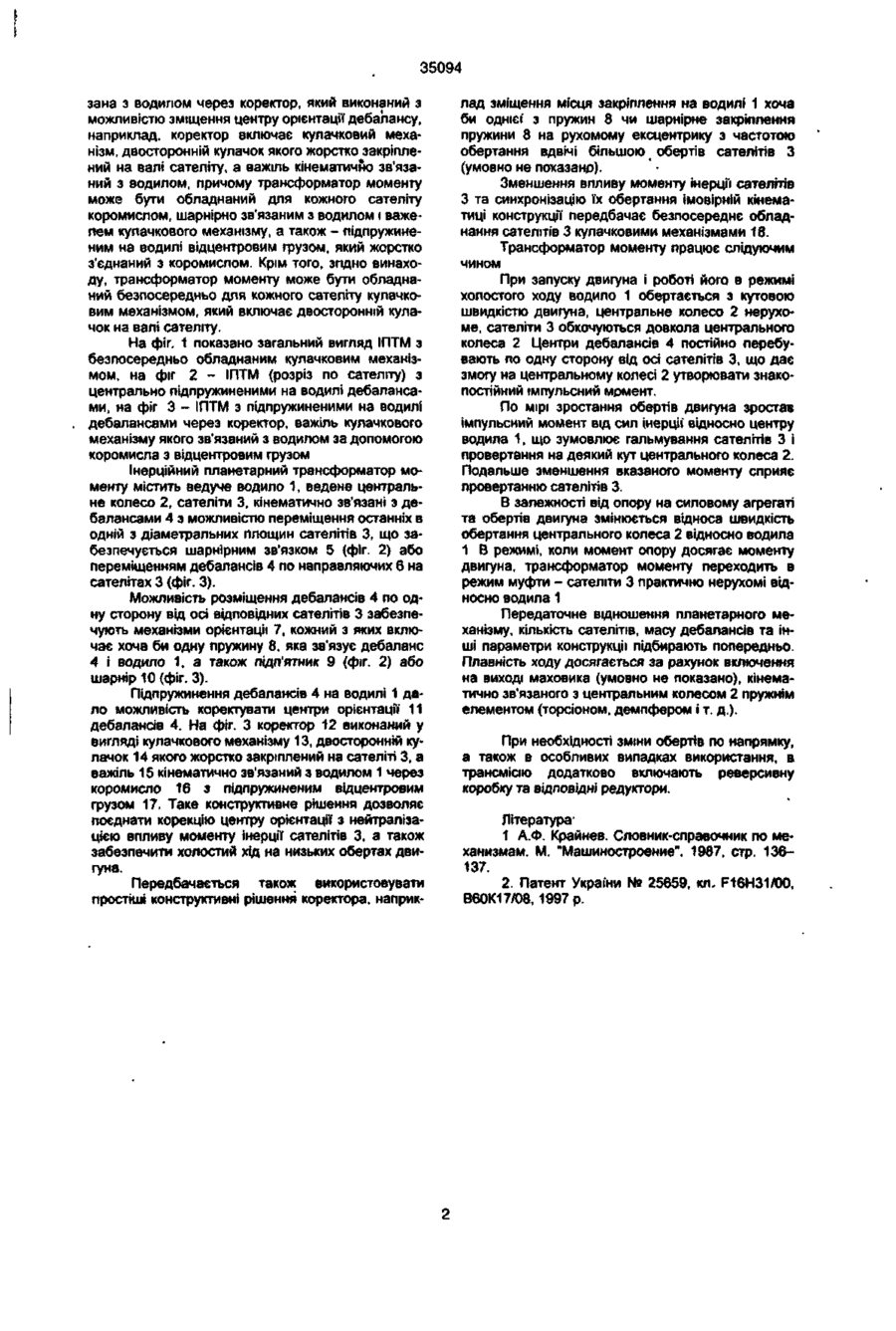
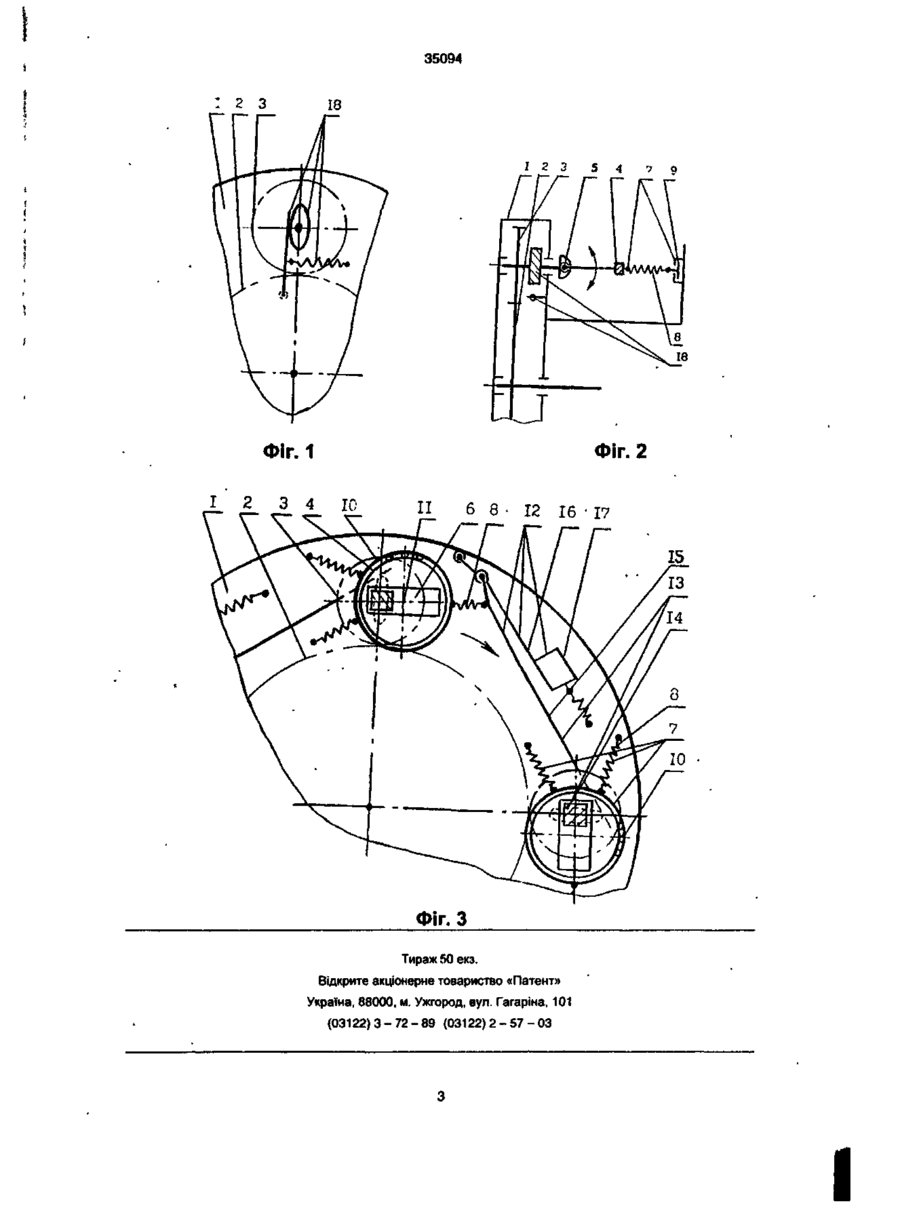
1. Інерційний планетарний трансформатор моменту з ведучим водилом, веденим центральним колесом, по меншій мірі двома сателітами з підпружиненими з можливістю переміщення в одній з діаметральних площин сателіту і по одну сторону від осі відповідного сателіту дебалансами. який відрізняється тим, що дебаланси підпружинені на водилі. 2. Трансформатор моменту по п 1, який відріз* няється тим, що принаймні одна з пружин орієнтації дебалансу кожного сателіту зв'язана з водилом через коректор, який виконаний з можливістю зміщення центру орієнтації дебалансу. З Трансформатор моменту по п. 2, який відрізняється тим, що коректор включає кулачковий механізм, двосторонній кулачок якого жорстко закріплений на валі сателіту, а важіль кінематично зв'язаний з водилом 4. Трансформатор моменту по п 3, який відрізняється тим, що він обладнаний для кожного сателіту коромислом, шарнірно зв'язаним з водилом і важелем кулачкового механізму, а також підпружиненим на водилі відцентровим грузом, який жорстко з'єднаний з коромислом 5 Трансформатор моменту по п. 1, який відрізняється тим. що він обладнаний для кожного сателіту кулачковим механізмом, який включає двосторонній кулачок на валі сателіту. Винахід належить до машинобудування і може бути використаний в безступеневих трасмісіях транспортних засобів та приводах машин загального і спеціального призначення Відомий інерційний планетарний трансформатор моменту (1), який включає імпульсний механізм з ведучим водилом, центральним колесом на виході та сателітами з дебалансами, а також перетворювач руху у вигляді муфт вільного ходу. Принцип дії його заключається в утворенні за рахунок сил інерції моменту на центральному колесі, направленого в залежності від розміщення дебалансів почергово в різні напрями, і подальшому перетворенні його в однонаправлений перетворювачем руху. Основними недоліками даної конструкції є складність її, мала довговічність та низька надійність. утворенні на центральному колесі знакопостіиного моменту за рахунок переміщення дебалансів по одну сторону від осі відповідного сателіту, що забезпечується результуючою сил інерції і сил пружності Однак, розміщення механізму орієнтації дебалансу на сателіті збільшує момент інерції' сателіту, а затруднения корекції центру орієнтації дебалансу зумовлює застосування дебалансів великої маси, особливо при хомпоновці конструкції з низькооборотними двигунами. В основу винаходу поставлено задачу створити інерційний планетарний трансформатор моменту шляхом удосконалення механізму орієнтації дебалансів, що дало можливість зменшити моменти інерції' сателітів та забезпечити корекцію центрів орієнтації дебалансів Поставлене завдання вирішується тим, що в інерційному планетарному трансформаторі моменту з ведучим водилом, веденим центральним колесом, по меншій мірі двома сателітами з підпружиненими з можливістю переміщення в одній з діаметральних площин сателіту і по одну сторону від осі відповідного сателіту дебалансами, згідно винаходу, дебаланси підпружинені на водилі. А також, згідно винаходу, принаймні одна з пружин орієнтації дебалансу кожного сателіту зв'я Найбільш близькою конструкцією до заявленої (прототипом) є інерційний планетарний трансформатор моменту (2) з ведучим водилом, веденим центральним колесом, по меншій мірі двома сателітами з підпружиненими співосно осі сателіту дебалансами з можливістю переміщення останніх в одній з діаметральних площин сателітів. Принцип дії трансформатора моменту оснований на со о о in со < э 35094 зана з водилом через коректор, який виконаний з можливістю зміщення центру орієнтації дебалансу, наприклад, коректор включає кулачковий механізм, двосторонній кулачок якого жорстко закріплений на валі сателіту, а важіль кінематично зв'язаний з водилом, причому трансформатор моменту може бути обладнаний для кожного сателіту коромислом, шарнірно зв'язаним з водилом і важелем кулачкового механізму, а також - підпружиненим на води лі відцентровим грузом, який жорстко з'єднаний з коромислом. Крім того, згідно винаходу, трансформатор моменту може бути обладнаний безпосередньо для кожного сателіту кулачковим механізмом, який включає двосторонній кулачок на валі сателіту. На фіг. 1 показано загальний вигляд ІПТМ з безпосередньо обладнаним кулачковим механізмом, на фіг 2 - ІПТМ (розріз по сателіту) з центрально підпружиненими на водилі дебалансами, на фіг 3 - ІПТМ з підпружиненими на водилі дебалансами через коректор, важіль кулачкового механізму якого зв'язаний з водилом за допомогою коромисла з відцентровим грузом Інерційний планетарний трансформатор моменту містить ведуче водило 1, ведене центральне колесо 2, сателіти 3, кінематично зв'язані з дебалансами 4 з можливістю переміщення останніх в одній з діаметральних площин сателітів 3, що забезпечується шарнірним зв'язком 5 (фіг. 2) або переміщенням дебалансів 4 по направляючих 6 на сателітах 3 (фіг. 3). Можливість розміщення дебалансів 4 по одну сторону від осі відповідних сателітів 3 забезпечують механізми орієнтації 7, кожний з яких включає хоча би одну пружину 8. яка зв'язує дебаланс 4 і водило 1, а також підп'ятник 9 (фіг. 2) або шарнір 10 (фіг. 3). Підпружинення дебалансів 4 на водилі 1 дало можливість коректувати центри орієнтації 11 дебалансів 4. На фіг. З коректор 12 виконаний у вигляді кулачкового механізму 13, двосторонній кулачок 14 якого жорстко закріплений на сателіті 3, а важіль 15 кінематично зв'язаний з водилом 1 через коромисло 16 з підлружиненим відцентровим грузом 17. Таке конструктивне рішення дозволяє поєднати корекцію центру орієнтації з нейтралізацією впливу моменту інерції сателітів 3, а також забезпечити холостий хід на низьких обертах двигуна. Передбачається також використовувати простіші конструктивні рішення коректора, наприк лад зміщення місця закріплення на водилі 1 хоча би однієї з пружин 8 чи шарнірне закріплення пружини 8 на рухомому ексцентрику з частотою обертання вдвічі більшою обертів сателітів З (умовно не показано). Зменшення впливу моменту інерції сателітів З та синхронізацію їх обертання імовірній кінематиці конструкції передбачає безпосереднє обладнання сателітів 3 кулачковими механізмами 18. Трансформатор моменту працює слідуючим чином При запуску двигуна і роботі його в режимі холостого ходу водило 1 обертається з кутовою швидкістю двигуна, центральне колесо 2 нерухоме, сателіти 3 обкочуються довкола центрального колеса 2 Центри дебалансів 4 постійно перебувають по одну сторону від осі сателітів 3, що дає змогу на центральному колесі 2 утворювати знакопостійний імпульсний момент. По мірі зростання обертів двигуна зростав імпульсний момент від сил інерції відносно центру водила 1, що зумовлює гальмування сателітів 3 і провертання на деякий кут центрального колеса 2. Подальше зменшення вказаного моменту сприяє провертанню сателітів 3. В залежності від опору на силовому агрегаті та обертів двигуна змінюється в'їдноса швидкість обертання центрального колеса 2 відносно водила 1 В режимі, коли момент опору досягає моменту двигуна, трансформатор моменту переходить в режим муфти - сателіти 3 практично нерухомі відносно водила 1 Передаточне відношення планетарного механізму, кількість сателітів, масу дебалансів та інші параметри конструкції підбирають попередньо. Плавність ходу досягається за рахунок включення на виході маховика (умовно не показано), кінематично зв'язаного з центральним колесом 2 пружнім елементом (торсіоном, демпфером і т. д.). При необхідності зміни обертів по напрямку, а також в особливих випадках використання, в трансмісію додатково включають реверсивну коробку та відповідні редуктори. Література" 1 А.Ф. Крайнев. Словник-справочник по механизмам. М. "Машиностроение", 1987, стр. 136137. 2. Патент України № 25659, кл, Ft6H31/00, В60К17/08, 1997 р. 35094 2 З 1 2 3 3 4 4 7 Q Фіг. 2 ФІГ 1 1 2 5 Ю II 6 8 К 16-17 Фіг. З Тираж 50 екз. Відкрите акціонерне товариство «Патент» Україна, 88000, м. Ужгород, вул. Гагаріна, 101 (03122) 3 - 7 2 - 8 9 (03122) 2 - 5 7 - 0 3 І
ДивитисяДодаткова інформація
Назва патенту англійськоюInertial planetary torque transformer
Автори англійськоюDanylyshyn Hryhorii Mykhailovych
Назва патенту російськоюИнерционный планетарный трансформатор момента
Автори російськоюДанилишин Григорий Михайлович
МПК / Мітки
МПК: F16H 33/00, B60K 17/06, F16H 31/00
Мітки: трансформатор, планетарний, інерційний, моменту
Код посилання
<a href="https://ua.patents.su/4-35094-inercijjnijj-planetarnijj-transformator-momentu.html" target="_blank" rel="follow" title="База патентів України">Інерційний планетарний трансформатор моменту</a>
Трансформатор моменту
Номер патенту: 33530
Опубліковано: 15.02.2001
Автор: Данилишин Григорій Михайлович
МПК: F16H 33/00, F16H 31/00, B60K 17/06
Мітки: трансформатор, моменту
Текст:
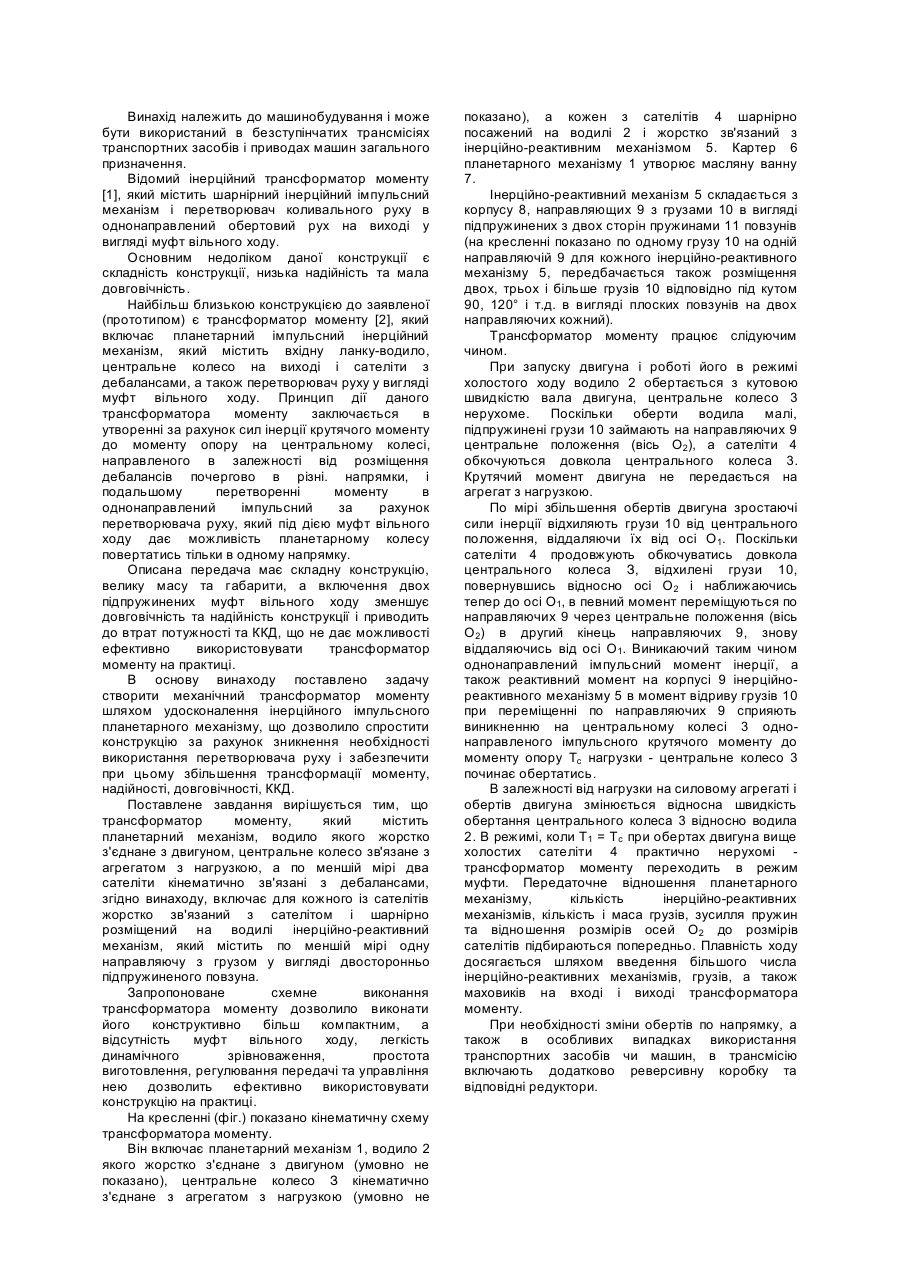
...Патент України № 25659, кл. F16H31/00, 1997 р. варіанти з'єднання вантажу з корпусом інерційнопланетарного механізму безпосередньо пружним елементом - прутком, торсіоном чи пластиною. Трансформатор моменту включає планетарний механізм 1, водило 2 якого жорстко з'єднане з двигуном (умовно не показано), центральне колесо 3 кінематично зв'язане з агрегатом з навантаженням (умовно не показано), а кожен з сателітів 4 шарнірно посажений на водилі...
Трансформатор моменту
Номер патенту: 25659
Опубліковано: 30.10.1998
Автор: Данилишин Григорій Михайлович
Мітки: трансформатор, моменту
Текст:
...нею дозволить ефективно використовувати конструкцію на практиці. На кресленні (фіг.) показано кінематичну схему трансформатора моменту. Він включає планетарний механізм 1, водило 2 якого жорстко з'єднане з двигуном (умовно не показано), центральне колесо З кінематично з'єднане з агрегатом з нагрузкою (умовно не показано), а кожен з сателітів 4 шарнірно посажений на водилі 2 і жорстко зв'язаний з інерційно-реактивним механізмом 5....
Інерційний трансформатор
Номер патенту: 30131
Опубліковано: 15.11.2000
Автор: Данильченко Іван Михайлович
МПК: B60K 17/00, F16H 33/00
Мітки: трансформатор, інерційний
Формула / Реферат:
1. Інерційний трансформатор, що містить корпус, вхідний та вихідний вали, два планетарні механізми зі спільним водилом, кінематично зв'язаним з вхідним валом, кожен із яких включає також центральне колесо, кінематично зв'язане з вихідним валом, зчеплені з центральним колесом проміжні сателіти і призначені для взаємодії з останніми основні сателіти, що установлені на водилі співвісно парами, належними в кожній парі різним планетарним...
Інерційний трансформатор
Номер патенту: 32757
Опубліковано: 15.02.2001
Автор: Данильченко Іван Михайлович
МПК: B60K 17/00, F16H 33/00
Мітки: трансформатор, інерційний
Формула / Реферат:
Інерційний трансформатор, що містить корпус, вхідний та вихідний вали, два планетарні механізми зі спільним водилом, кінематично зв'язаним з вхідним валом, кожен із яких включає також центральне колесо, кінематично зв'язане у кожному планетарному механізмі з вихідним валом, зчеплені з центральним колесом проміжні сателіти і зчеплені з останніми основні сателіти, які установлені на водилі співвісно парами різних планетарних механізмів, та...
Зубчато-важільний планетарний механізм
Номер патенту: 30308
Опубліковано: 15.11.2000
Автори: Смутко Світлана Валеріївна, Параска Георгій Борисович
МПК: F16H 1/28, F16H 37/00
Мітки: планетарний, механізм, зубчато-важільний
Формула / Реферат:
Зубчатоважільний планетарний механізм, який містить нерухоме зубчате колесо, водило, два жорстко з'єднаних сателіти, встановлених на водилі, зубчате колесо з віссю обертання, розташованою в водилі, важіль, з'єднаний з зубчатим колесом, який відрізняється тим, що сателіти виконані з різними радіусами початкових кіл, зубчате колесо виконано з можливістю зміни радіуса початкового кола та зміни місця осі обертання відносно осі обертання водила, а...
Попередній патент: Екіпіровка боксерів
Наступний патент: Спосіб очищення висококонцентрованого водно-спиртового розчину
Випадковий патент: Парогенератор