Спосіб визначення поточної продуктивності преса-гранулятора комбікормів
Номер патенту: 36277
Опубліковано: 27.10.2008
Автори: Сапаров Михайло Вадимович, Плєве Олександр Георгійович

Формула / Реферат
1. Спосіб визначення поточної продуктивності преса-гранулятора комбікормів, що включає контроль рівня гранулята в колонці, який відрізняється тим, що цей рівень в процесі роботи преса підтримують безперервно на конструктивно обґрунтованому завданні зміною частоти обертання ротора розвантажувача на виході охолоджувальної колонки, причому продуктивність преса-гранулятора визначають як величину, прямо пропорційну алгебраїчній сумі цієї частоти обертання та швидкості зміни рівня в колонці.
2. Спосіб за п. 1, який відрізняється тим, що частоту обертання ротора розвантажувача коректують керуючим впливом, який є пропорційним сумі значень відхилення від завдання поточного значення рівня, інтеграла та диференціала цього відхилення.
3. Спосіб за п. 1, який відрізняється тим, що запам'ятовують перше досягнення заданого рівня в колонці після початку роботи преса.
Текст
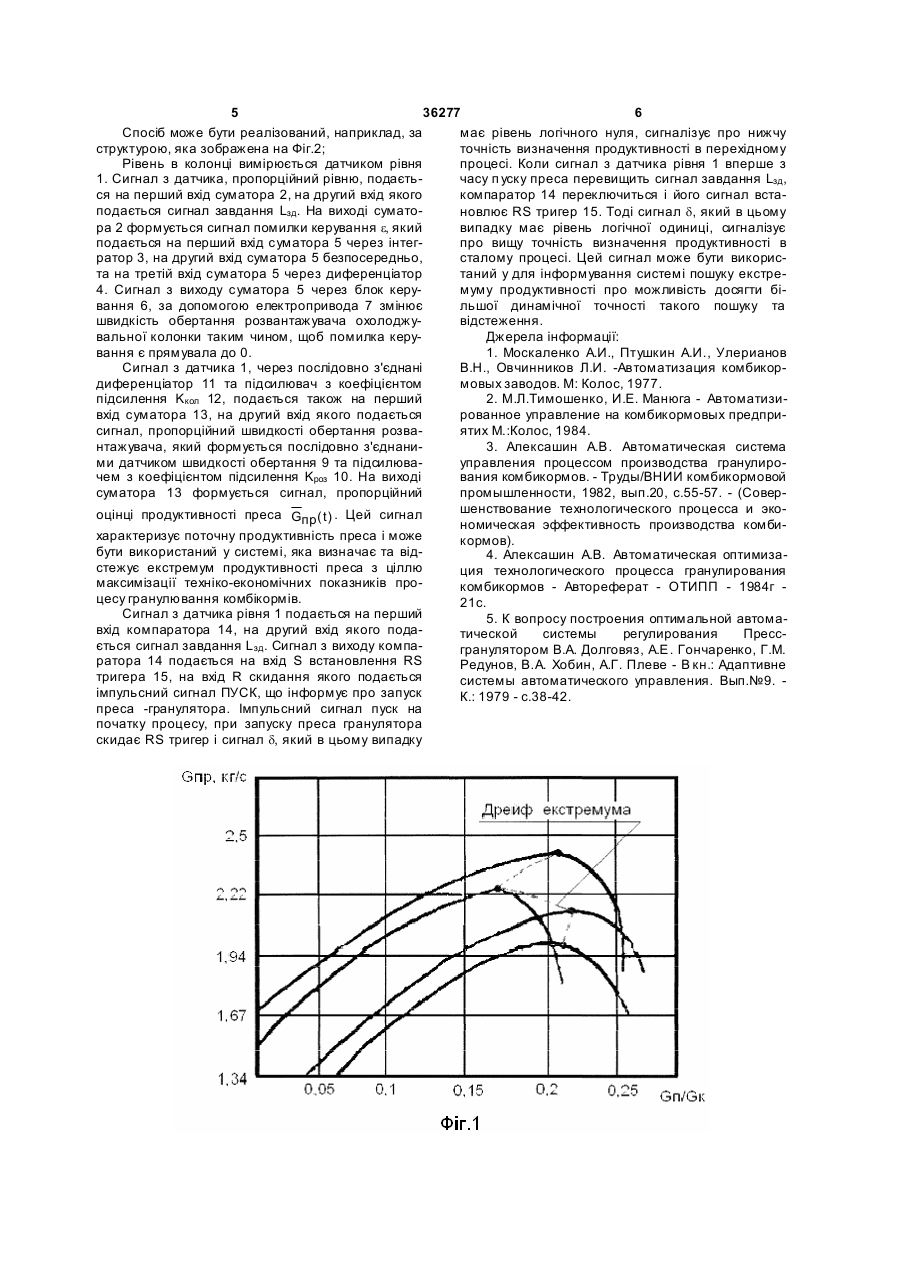
1. Спосіб визначення поточної продуктивності преса-гранулятора комбікормів, що включає контроль рівня гранулята в колонці, який відрізняється тим, що цей рівень в процесі роботи преса підтримують безперервно на конструктивно обґрунтованому завданні зміною частоти обертан 3 36277 4 ності преса, обмежує можливість використання На початку роботи преса - гранулятора рівень способу у системах керування, спрямованих на гранул в охолоджувальній колонці може суттєво досягнення максимальної продуктивності преса. відрізнятися від заданого. Звичайно, на початку Крім того, рівень гранул в охолоджувальній роботи колонка взагалі є порожньою. Коли гранули колонці, відповідно до цього способу, безперервно надходять з вузла, що пресує, в колонку, рівень L змінюється, коливаючись між рівнями, що встанов ній починає поступово збільшуватись і через влюються відповідними дискретними датчиками. деякий час наближається до заданого Lзд. Оберти Такі зміни рівня є додатковим збуренням в системі розвантажувача, за допомогою пропорційнорегулювання температури в охолоджувальній коінтегрально-диференційного регулятора, коректулонці, що знижують якість регулювання темпераються таким чином, щоб рівень в колонці дорівнютури і, відповідно, якість готових гранул. вав завданню, тому, коли рівень в колонці менше В основу способу, що пропонується, поставзавдання, оберти розвантажувача зменшуються, а лена задача збільшення швидкодії визначання коли рівень більше завдання - збільшуються. Запродуктивності преса з одночасним підвищенням вдання рівня Lзд визначається конструкцією колонякості роботи охолоджувальної колонки, шляхом ки і є незмінним. поточного вимірювання рівня гранул в колонці та Швидкість зміни рівня в колонці визначається реалізації безперервного режиму регулювання різницею продуктивності преса Gnp (витратами обертів ротора розвантажувача в функції відхигранул на вході в колонку) та витрат гранул на лення рівня гранул від завдання. виході колонки С вих, що пропорційні кількості оберПоставлена задача вирішується тим, що в тів розвантажувача wр: способі визначення продуктивності преса, що пеdL (t ) Kкол = Gпр (t ) - Gвих ( t ) (2) редбачає регулювання рівня в охолоджувальній dt , колонці, згідно корисної моделі рівень наближають Де Kкол - коефіцієнт, який залежить від геометдо завдання методом регулювання частоти оберричних розмірів колонки; тання ротора розвантажувача на виході охолоL - рівень в колонці. джувальній колонки. Продуктивність преса визнаТоді, враховуючи що Gвих(t)=wp(t)Kроз, де Kроз чають як величину пропорційну швидкості зміни коефіцієнт пропорційності: рівня в колонці та швидкості обертання розвантаdL (t ) жувача на виході колонки, причому запам'ятовуGпр ( t ) = Ккол + wp ( t)Kроз (3) ють перше досягнення заданого рівня в колонці dt , після початку роботи преса і значення продуктивДе Gпр - поточна оцінка продуктивності преності після цього вважаються більш точними. ( Екстремум продуктивності преса - гранулятора практично співпадає з екстремумом техніко - економічних показників технологічного процесу гранулювання комбікормів і досягнення цього екстремуму є актуальним. Екстремум продуктивності досягається встановленням відповідного режиму гідротермічної обробки комбікорму, тобто такого співвідношення розсипного комбікорму та насиченої пари, що подаються в змішувач, при якому енерговитрати на пресування є мінімальними [5]. Але положення цього екстремуму залежить від реологічних властивостей комбікорму, домішок та інших неконтрольованих факторів, тому в процесі роботі преса екстремум дрейфує, як показано на Фіг.1., що потребує побудови спеціальних систем його пошуку та стабілізації. Системи, які використовують непрямі методи визначення положення екстремуму продуктивності, мають обмежену точність, що знижує досяжні технікоекономічні показники процесу пресування. Крім того, помилки в визначенні положення екстремуму можуть призвести до аварійних зупинок технологічного процесу, оскільки, при досягненні такого зволоження комбікорму в змішувачі, яке відповідає критичній заекстремальній точці на характеристиці, різко зростає опір пресуванню і вузол, що пресує, заклинюється. Тому більш придатними для практичного використання є методи, які базуються на прямому пошуку екстремуму продуктивності, що потребує способ поточного визначення продуктивності преса із швидкодією, достатньою для відстеження його положення в умовах дрейфу. Заявлений спосіб може здійснюватись таким чином. ) са. В процесі роботи можливі два варіанта: - Коли рівень значно відрізняється від завдання, що звичайно буває в перехідних режимах, при заповненні колонки на початку роботи преса, регулятор значно змінює частоту обертання розвантажувача wр. В цьому випадку швидкість зміни рівня L в колонці (похідна dL(t ) ) має відносно великий dt рівень і на точність визначення продуктивності преса Gпр впливають обидва емпіричних коефіцієнта - Kкол, та Kроз, які калібрують вимірювання продуктивності. Оскільки помилка в визначенні цих коефіцієнтів безпосередньо впливає на точність визначення продуктивності преса, в цьому варіанті точність буде відносно нижче. - Коли рівень мало відрізняється від завдання, що звичайно буває в сталому режимі роботи за рахунок регулювання рівня, швидкість зміни рівня (похідна dL(t ) ) незначна, та коефіцієнт Kкол, і, dt природно, точність його визначення, не впливає на точність визначення продуктивності преса. В такому режимі точність визначення продуктивності преса відносна вища. Можна прийняти, що сталий режим починається, коли рівень в колонці вперше досягає завдання після початку роботи преса та зберігається протягом безперервної роботи преса. Сигналізація ситуації, коли можлива більш висока точність визначення продуктивності, доцільна для інформування системи пошуку екстремуму продуктивності про можливість досягти більшої динамічної точності такого пошуку та відстеження. 5 36277 6 Спосіб може бути реалізований, наприклад, за має рівень логічного нуля, сигналізує про нижчу структурою, яка зображена на Фіг.2; точність визначення продуктивності в перехідному Рівень в колонці вимірюється датчиком рівня процесі. Коли сигнал з датчика рівня 1 вперше з 1. Сигнал з датчика, пропорційний рівню, подаєтьчасу п уску преса перевищить сигнал завдання Lзд, ся на перший вхід суматора 2, на другий вхід якого компаратор 14 переключиться і його сигнал встаподається сигнал завдання Lзд. На виході суматоновлює RS тригер 15. Тоді сигнал d, який в цьому ра 2 формується сигнал помилки керування e, який випадку має рівень логічної одиниці, сигналізує подається на перший вхід суматора 5 через інтегпро вищу точність визначення продуктивності в ратор 3, на другий вхід суматора 5 безпосередньо, сталому процесі. Цей сигнал може бути використа на третій вхід суматора 5 через диференціатор таний у для інформування системі пошуку екстре4. Сигнал з виходу суматора 5 через блок керумуму продуктивності про можливість досягти бівання 6, за допомогою електропривода 7 змінює льшої динамічної точності такого пошуку та швидкість обертання розвантажувача охолоджувідстеження. вальної колонки таким чином, щоб помилка керуДжерела інформації: вання є прямувала до 0. 1. Москаленко А.И., Птушкин А.И., Улерианов Сигнал з датчика 1, через послідовно з'єднані В.Н., Овчинников Л.И. -Автоматизация комбикордиференціатор 11 та підсилювач з коефіцієнтом мовых заводов. М: Колос, 1977. підсилення Kкол 12, подається також на перший 2. М.Л.Тимошенко, И.Е. Манюга - Автоматизивхід суматора 13, на другий вхід якого подається рованное управление на комбикормовых предприсигнал, пропорційний швидкості обертання розваятих М.:Колос, 1984. нтажувача, який формується послідовно з'єднани3. Алексашин А.В. Автоматическая система ми датчиком швидкості обертання 9 та підсилювауправления процессом производства гранулирочем з коефіцієнтом підсилення Kроз 10. На виході вания комбикормов. - Труды/ВНИИ комбикормовой суматора 13 формується сигнал, пропорційний промышленности, 1982, вып.20, с.55-57. - (Совершенствование технологического процесса и экооцінці продуктивності преса Gпр( t ) . Цей сигнал номическая эффективность производства комбихарактеризує поточну продуктивність преса і може кормов). бути використаний у системі, яка визначає та від4. Алексашин А.В. Автоматическая оптимизастежує екстремум продуктивності преса з ціллю ция технологического процесса гранулирования максимізації техніко-економічних показників прокомбикормов - Автореферат - ОТИПП - 1984г цесу гранулювання комбікормів. 21с. Сигнал з датчика рівня 1 подається на перший 5. К вопросу построения оптимальной автомавхід компаратора 14, на другий вхід якого податической системы регулирования Прессється сигнал завдання Lзд. Сигнал з виходу компагранулятором В.А. Долговяз, А.Е. Гончаренко, Г.М. ратора 14 подається на вхід S встановлення RS Редунов, В.А. Хобин, А.Г. Плеве - В кн.: Адаптивне тригера 15, на вхід R скидання якого подається системы автоматического управления. Вып.№9. імпульсний сигнал ПУСК, що інформує про запуск К.: 1979 - с.38-42. преса -гранулятора. Імпульсний сигнал пуск на початку процесу, при запуску преса гранулятора скидає RS тригер і сигнал d, який в цьому випадку 7 Комп’ютерна в ерстка В. Мацело 36277 8 Підписне Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of determining current output of pelleting press
Автори англійськоюPlieve Oleksandr Heorhiiovych, Saparov Mykhailo Vadymovych
Назва патенту російськоюСпособ определения текущей производительности пресса-гранулятора комбикормов
Автори російськоюПлеве Александр Георгиевич, Сапаров Михаил Вадимович
МПК / Мітки
МПК: B30B 9/18
Мітки: комбікормів, поточної, визначення, преса-гранулятора, продуктивності, спосіб
Код посилання
<a href="https://ua.patents.su/4-36277-sposib-viznachennya-potochno-produktivnosti-presa-granulyatora-kombikormiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення поточної продуктивності преса-гранулятора комбікормів</a>
Спосіб визначення оптимальних конструктивно-технологічних параметрів преса-гранулятора
Номер патенту: 30058
Опубліковано: 11.02.2008
Автори: Штефан Євген Васильович, Риндюк Дмитро Вікторович
МПК: B01J 2/00
Мітки: спосіб, оптимальних, параметрів, визначення, преса-гранулятора, конструктивно-технологічних
Формула / Реферат:
Спосіб визначення оптимальних конструктивно-технологічних параметрів преса-гранулятора, який включає аналіз процеса грануляції методом екструзії, вибір параметра, формулювання задачі, розв'язування задачі та визначення плану розподілу параметрів грануляції, який відрізняється тим, що проводиться встановлення граничних обмежень -діаметр отвору, кут нахилу фаски, тиск при екструзії, вологість сировини, довжина отвору, статистична оцінка...
Спосіб визначення продуктивності нагнітача (компресора) при діагностичних випробуваннях в експлуатаційних умовах
Номер патенту: 47502
Опубліковано: 15.07.2002
Автори: Горбенко Ігор Валентинович, Бойко Михайло Васильович, Вакуленко Георгій Єгорович, Саприкін Сергій Олексійович
МПК: G01M 15/00
Мітки: діагностичних, продуктивності, умовах, спосіб, нагнітача, випробуваннях, експлуатаційних, компресора, визначення
Формула / Реферат:
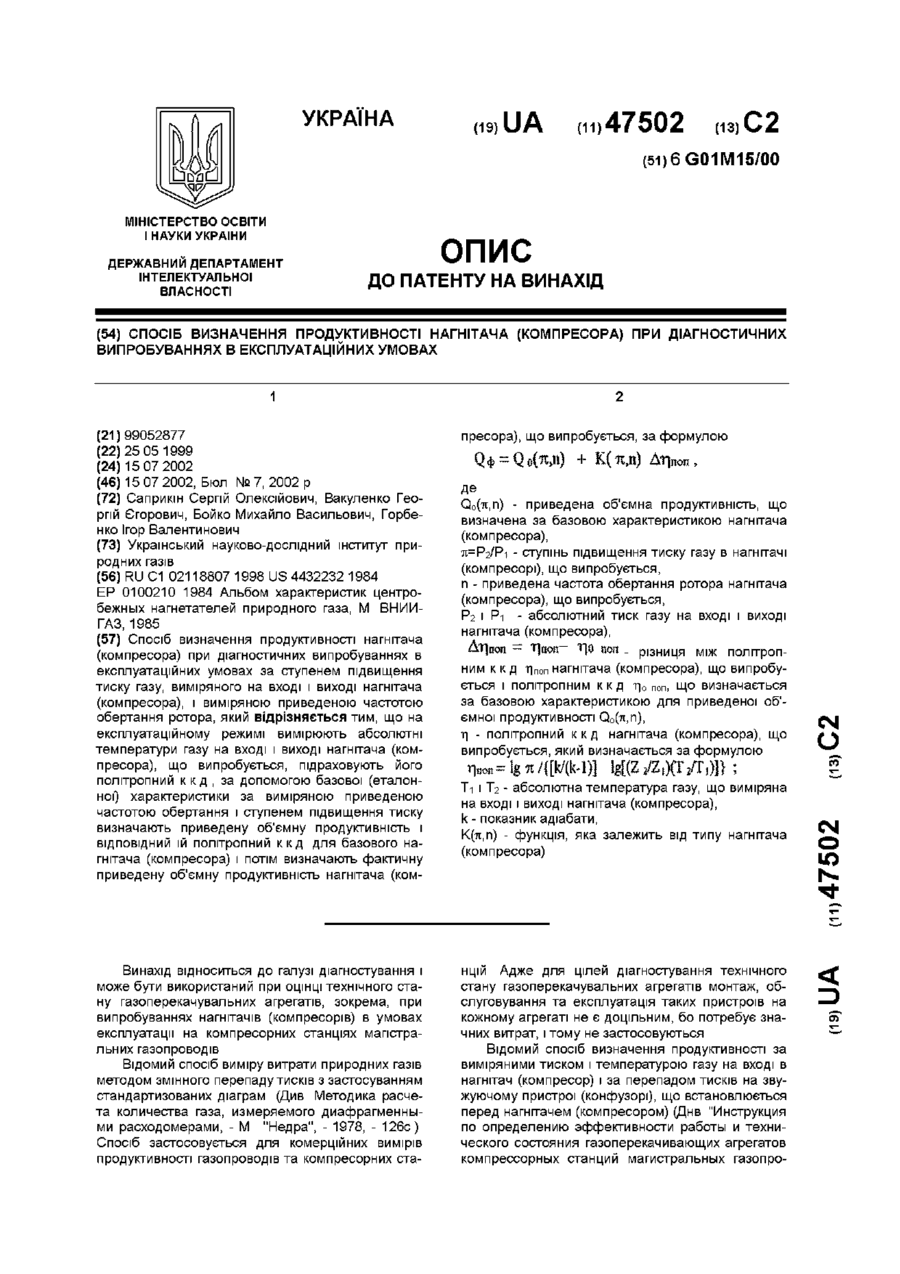
Спосіб визначення продуктивності нагнітача (компресора) при діагностичних випробуваннях в експлуатаційних умовах за ступенем підвищення тиску газу, виміряного на вході і виході нагнітача (компресора), і виміряною приведеною частотою обертання ротора, який відрізняється тим, що на експлуатаційному режимі вимірюють абсолютні температури газу на вході і виході нагнітача (компресора), що випробується, підраховують його політропний к.к.д., за...
Спосіб визначення насіннєвої продуктивності насаджень сосни звичайної
Номер патенту: 56292
Опубліковано: 15.05.2003
Автор: Решетник Людмила Леонідівна
МПК: A01G 23/00
Мітки: насіннєвої, сосни, насаджень, спосіб, визначення, продуктивності, звичайної
Формула / Реферат:
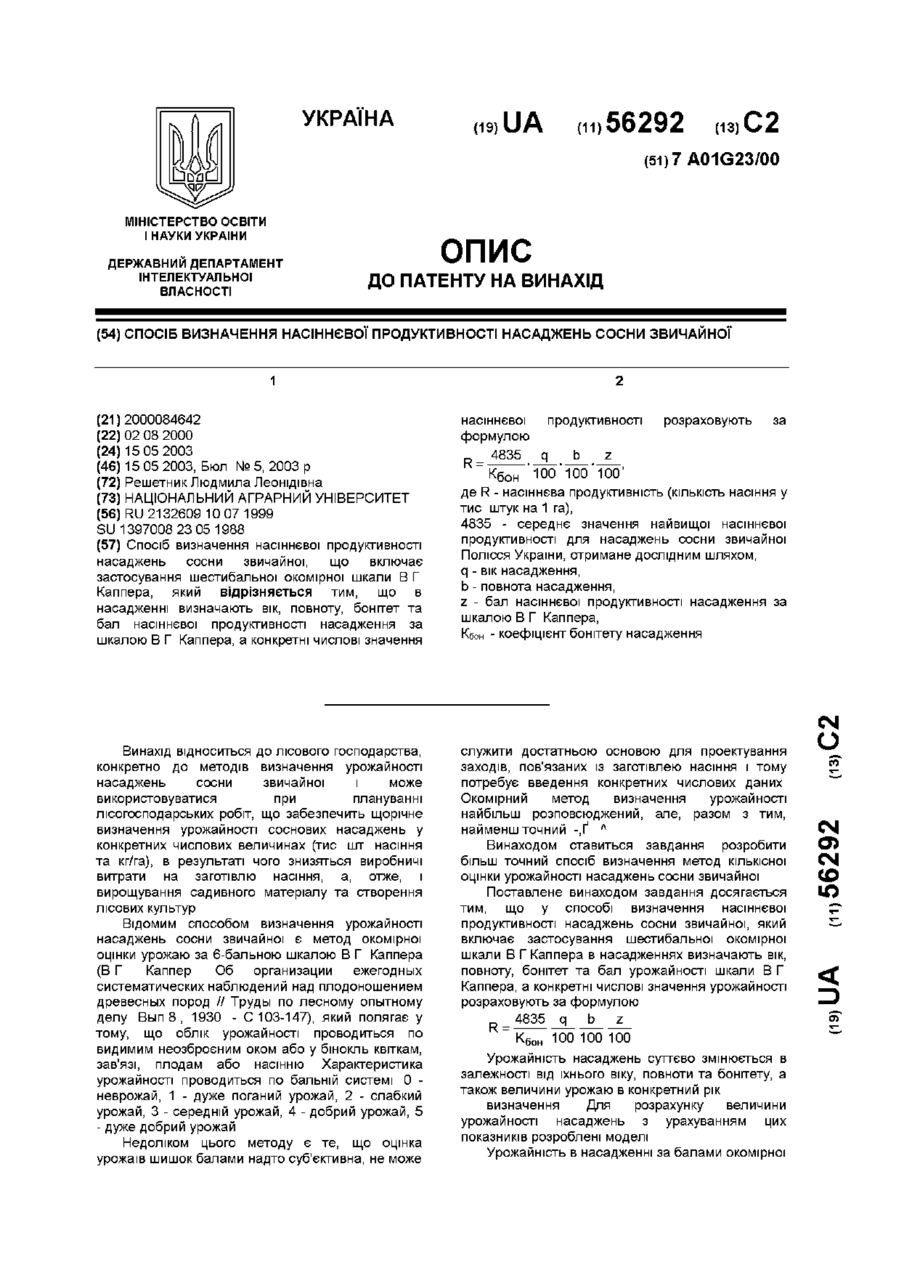
Спосіб визначення насіннєвої продуктивності насаджень сосни звичайної, що включає застосування шестибальної окомірної шкали В.Г. Каппера, який відрізняється тим, що в насадженні визначають вік, повноту, бонітет та бал насіннєвої продуктивності насадження за шкалою В.Г. Каппера, а конкретні числові значення насіннєвої продуктивності розраховують за формулою:де...
Спосіб визначення продуктивності нагнітача при діагностуванні в експлуатаційних умовах
Номер патенту: 27154
Опубліковано: 28.02.2000
Автори: Саприкін Сергій Олексійович, Бойко Михайло Васильович, Вакуленко Георгій Єгорович, Гарагуль Анатолій Андрійович
МПК: G01F 1/34, G01M 10/00, F02C 9/28
Мітки: умовах, продуктивності, нагнітача, експлуатаційних, діагностуванні, спосіб, визначення
Формула / Реферат:
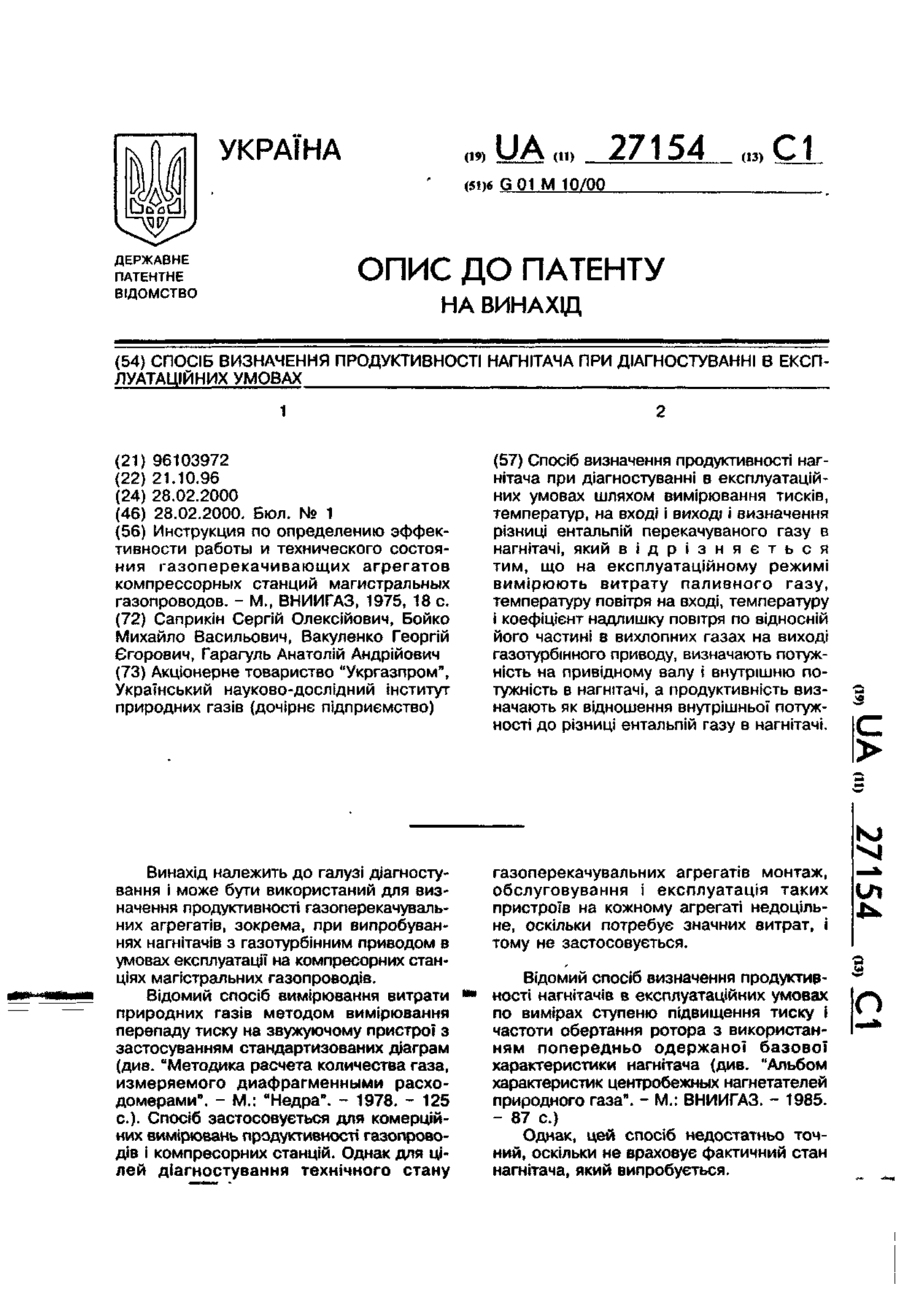
Спосіб визначення продуктивності нагнітача при діагностуванні в експлуатаційних умовах шляхом вимірювання тисків, температур, на вході і виході і визначення різниці ентальпій перекачуваного газу в нагнітачі, який відрізняється тим, що на експлуатаційному режимі вимірюють витрату паливного газу, температуру повітря на вході, температуру і коефіцієнт надлишку повітря по відносній його частині в вихлопних газах на виході газотурбінного приводу,...
Спосіб визначення продуктивності нагнітачів при їх діагностуванні в експлуатаційних умовах
Номер патенту: 72275
Опубліковано: 15.02.2005
Автори: Дутчак Олександр Іванович, Вакуленко Георгій Єгорович, Саприкін Сергій Олексійович, Праско Олександр Володимирович
МПК: F04D 27/02
Мітки: умовах, нагнітачів, продуктивності, експлуатаційних, діагностуванні, спосіб, визначення
Формула / Реферат:
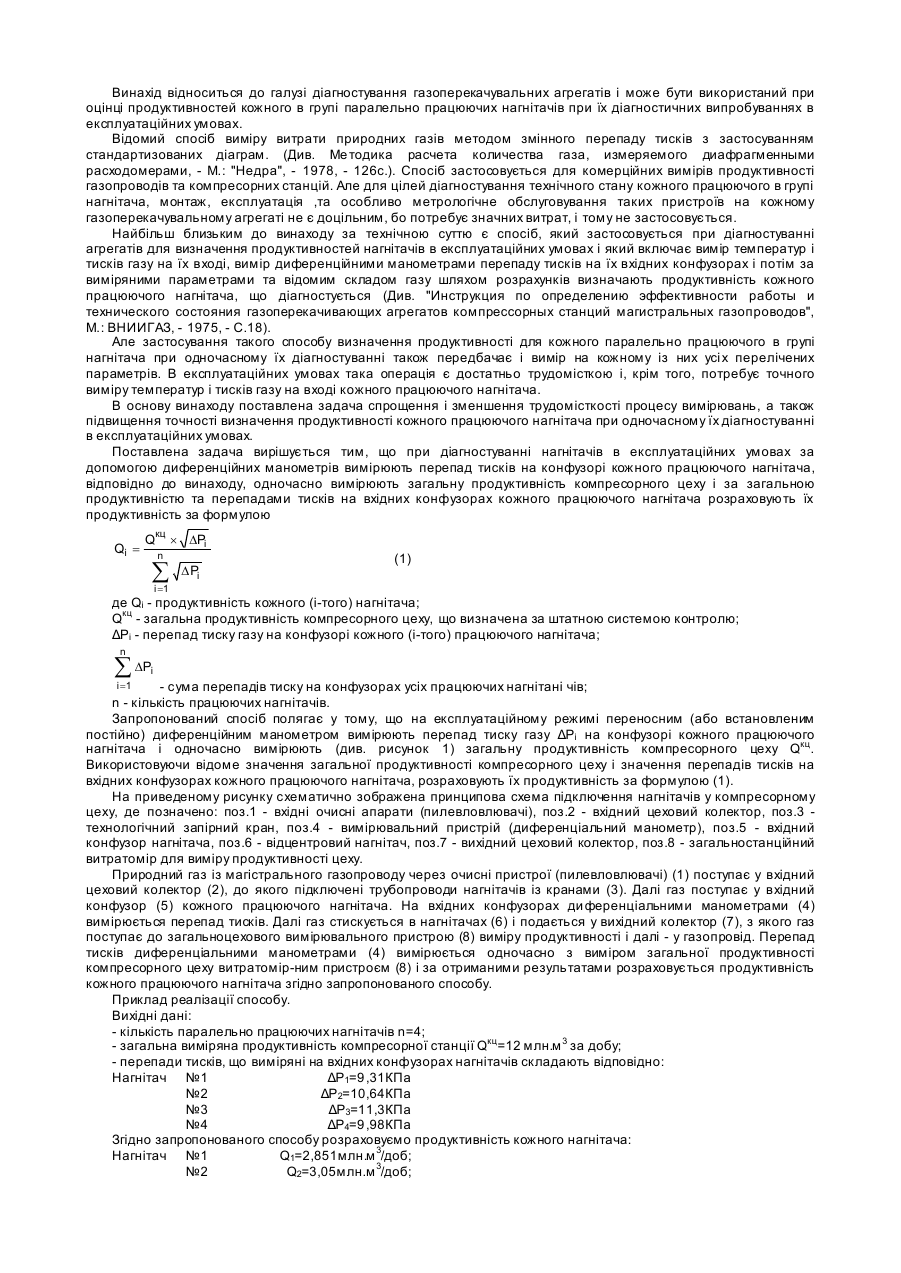
Спосіб визначення продуктивності нагнітачів при їх діагностуванні в експлуатаційних умовах, в якому за допомогою диференціальних манометрів вимірюють перепад тисків на конфузорі кожного працюючого нагнітача, який відрізняється тим, що одночасно вимірюють загальну продуктивність компресорного цеху і за загальною продуктивністю та значеннями перепадів тисків на вхідних конфузорах кожного працюючого нагнітача розраховують їх продуктивність за...
Попередній патент: Багатовалкова дробарка для подрібнення сталевої стружки
Наступний патент: Спосіб лікування периферичної вітреохоріоретинальної дистрофії
Випадковий патент: Композиція плавленого сиру