Вібропоглинаюча платформа
Номер патенту: 36737
Опубліковано: 10.11.2008
Автори: Смольський Андрій Григорович, Дівеєв Богдан Михайлович, Вікович Ігор Андрійович, Дубневич Олександр Михайлович
Формула / Реферат
Вібропоглинаюча платформа, що містить плиту з пружними елементами, динамічні гасники коливань, яка відрізняється тим, що додатково містить шарувату композитну пластину з високими демпфірувальними властивостями, встановлену на пружних елементах з розміщеними на ній системою динамічних гасників коливань, виконаних у вигляді консольно закріплених, на плоских пружних елементах, мас.
Текст
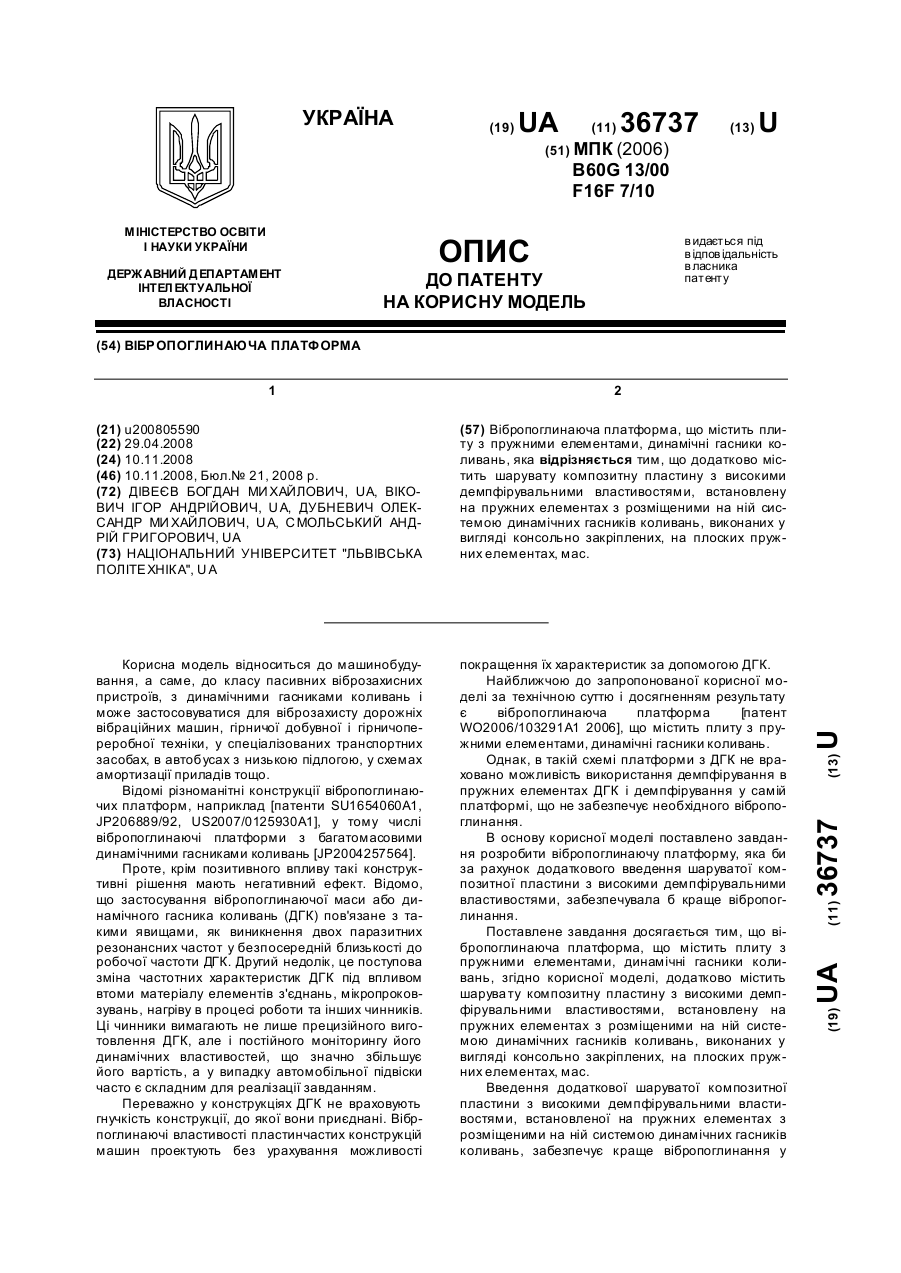
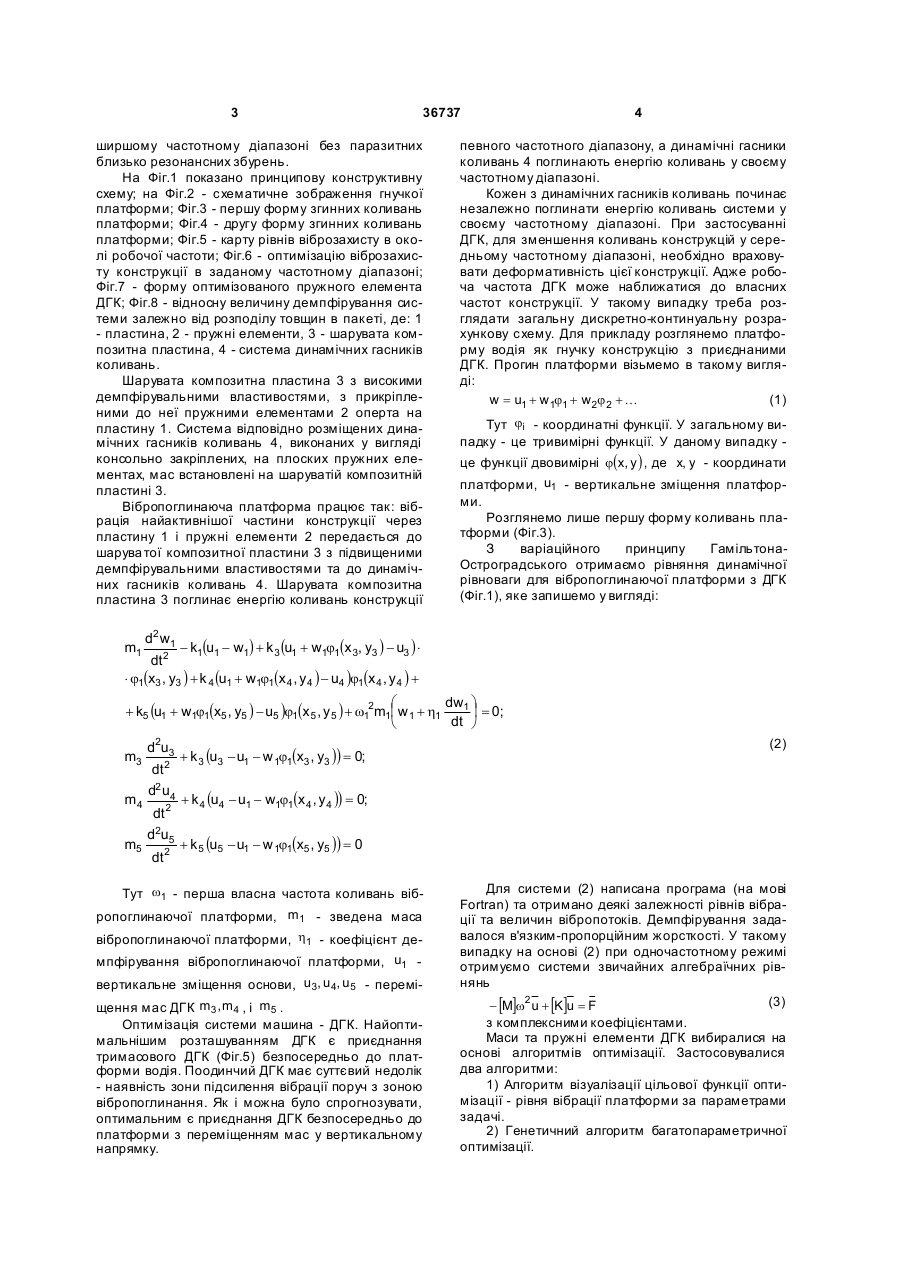
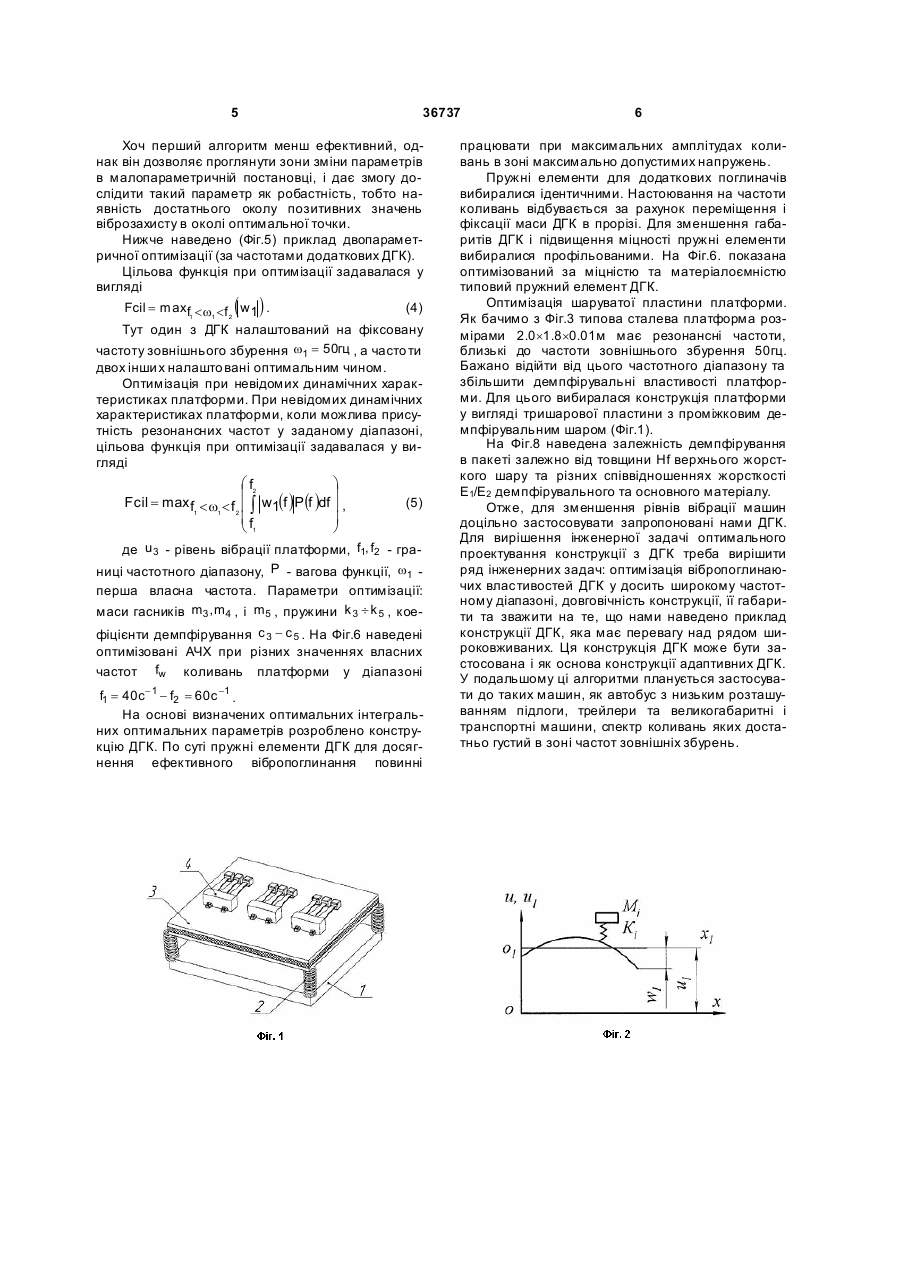
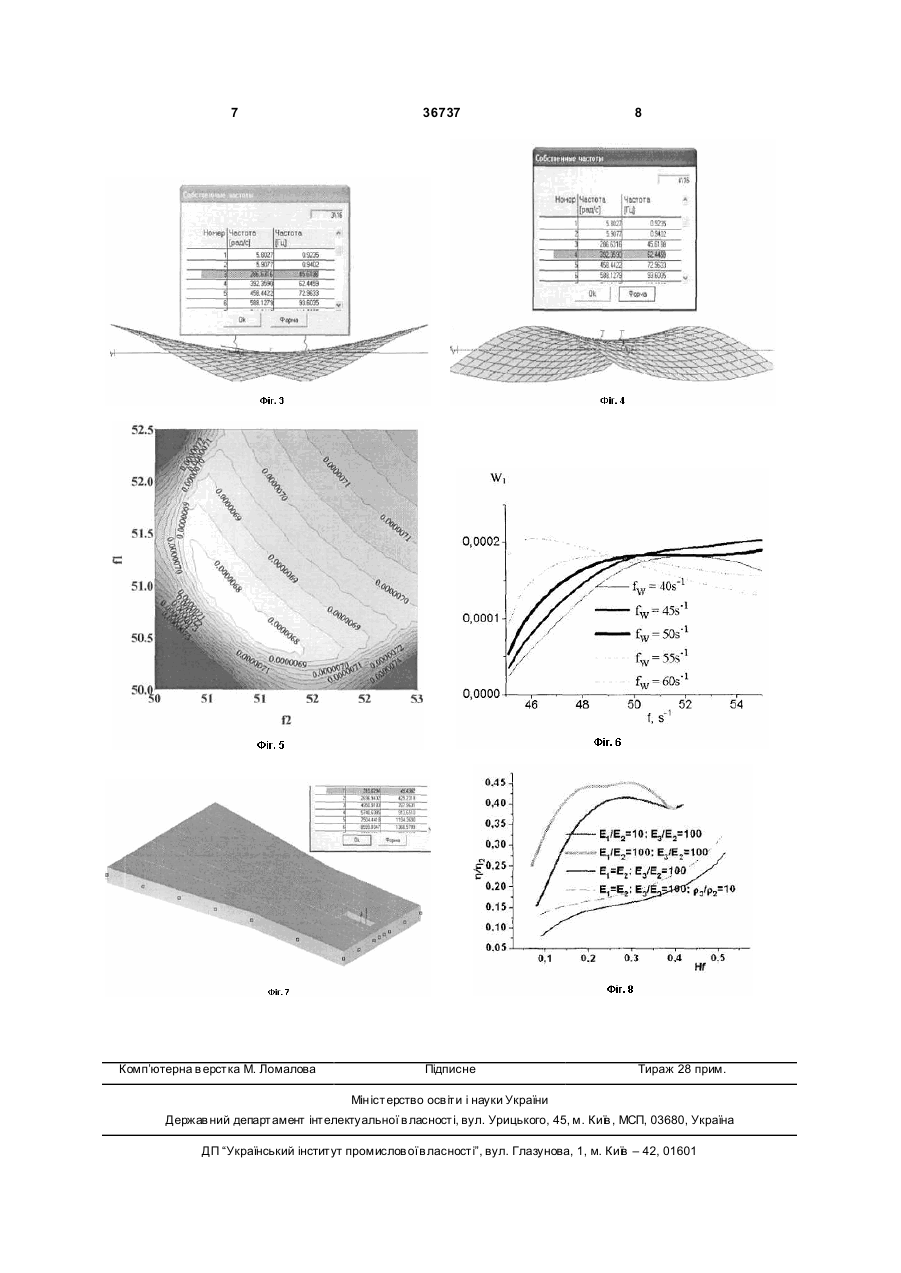
Вібропоглинаюча платформа, що містить плиту з пружними елементами, динамічні гасники коливань, яка відрізняється тим, що додатково містить шарувату композитну пластину з високими демпфірувальними властивостями, встановлену на пружних елементах з розміщеними на ній системою динамічних гасників коливань, виконаних у вигляді консольно закріплених, на плоских пружних елементах, мас. (19) (21) u200805590 (22) 29.04.2008 (24) 10.11.2008 (46) 10.11.2008, Бюл.№ 21, 2008 р. (72) ДІВЕЄВ БОГДАН МИ ХАЙЛОВИЧ, UA, ВІКОВИЧ ІГОР АНДРІЙОВИЧ, U A, ДУБНЕВИЧ ОЛЕКСАНДР МИ ХАЙЛОВИЧ, U A, С МОЛЬСЬКИЙ АНДРІЙ ГРИГОРОВИЧ, UA (73) НАЦІОНАЛЬНИЙ УНІВЕРСИТЕТ "ЛЬВІВСЬКА ПОЛІТЕХНІКА", U A 3 36737 ширшому частотному діапазоні без паразитних близько резонансних збурень. На Фіг.1 показано принципову конструктивну схему; на Фіг.2 - схематичне зображення гнучкої платформи; Фіг.3 - першу форму згинних коливань платформи; Фіг.4 - другу форму згинних коливань платформи; Фіг.5 - карту рівнів віброзахисту в околі робочої частоти; Фіг.6 - оптимізацію віброзахисту конструкції в заданому частотному діапазоні; Фіг.7 - форму оптимізованого пружного елемента ДГК; Фіг.8 - відносну величину демпфірування системи залежно від розподілу товщин в пакеті, де: 1 - пластина, 2 - пружні елементи, 3 - шарувата композитна пластина, 4 - система динамічних гасників коливань. Шарувата композитна пластина 3 з високими демпфірувальними властивостями, з прикріпленими до неї пружними елементами 2 оперта на пластину 1. Система відповідно розміщених динамічних гасників коливань 4, виконаних у вигляді консольно закріплених, на плоских пружних елементах, мас встановлені на шаруватій композитній пластині 3. Вібропоглинаюча платформа працює так: вібрація найактивнішої частини конструкції через пластину 1 і пружні елементи 2 передається до шарува тої композитної пластини 3 з підвищеними демпфірувальними властивостями та до динамічних гасників коливань 4. Шарувата композитна пластина 3 поглинає енергію коливань конструкції 4 певного частотного діапазону, а динамічні гасники коливань 4 поглинають енергію коливань у своєму частотному діапазоні. Кожен з динамічних гасників коливань починає незалежно поглинати енергію коливань системи у своєму частотному діапазоні. При застосуванні ДГК, для зменшення коливань конструкцій у середньому частотному діапазоні, необхідно враховувати деформативність цієї конструкції. Адже робоча частота ДГК може наближатися до власних частот конструкції. У такому випадку треба розглядати загальну дискретно-континуальну розрахункову схему. Для прикладу розглянемо платформу водія як гнучку конструкцію з приєднаними ДГК. Прогин платформи візьмемо в такому вигляді: w = u1 + w1j1 + w2j 2 + K (1) Тут ji - координатні функції. У загальному випадку - це тривимірні функції. У даному випадку це функції двовимірні j(x, y ) , де x, y - координати платформи, u1 - вертикальне зміщення платформи. Розглянемо лише першу форму коливань платформи (Фіг.3). З варіаційного принципу ГамільтонаОстроградського отримаємо рівняння динамічної рівноваги для вібропоглинаючої платформи з ДГК (Фіг.1), яке запишемо у вигляді: d 2 w1 - k1(u1 - w1) + k 3 (u1 + w1j1(x 3, y3 ) - u3 ) × dt 2 × j1(x3 , y3 ) + k 4 (u1 + w1j1(x 4 , y 4 ) - u4 )j1(x 4 , y 4 ) + m1 æ dw1 ö + k5 (u1 + w1j1(x5 , y5 ) - u5 )j1(x 5 , y 5 ) + w12m1ç w 1 + h1 ÷ = 0; dt ø è m3 m4 m5 d2u3 dt 2 + k 3 (u3 - u1 - w 1j1(x3 , y3 )) = 0; d2 u4 + k 4 (u4 - u1 - w1j1(x 4 , y 4 )) = 0; d2u5 (2) + k 5 (u5 - u1 - w 1j1(x5 , y5 )) = 0 dt 2 dt 2 Тут w1 - перша власна частота коливань вібропоглинаючої платформи, m1 - зведена маса вібропоглинаючої платформи, h1 - коефіцієнт демпфірування вібропоглинаючої платформи, u1 вертикальне зміщення основи, u3, u4, u5 - переміщення мас ДГК m3 , m4 , і m5 . Оптимізація системи машина - ДГК. Найоптимальнішим розташуванням ДГК є приєднання тримасового ДГК (Фіг.5) безпосередньо до платформи водія. Поодинчий ДГК має суттєвий недолік - наявність зони підсилення вібрації поруч з зоною вібропоглинання. Як і можна було спрогнозувати, оптимальним є приєднання ДГК безпосередньо до платформи з переміщенням мас у вертикальному напрямку. Для системи (2) написана програма (на мові Fortran) та отримано деякі залежності рівнів вібрації та величин вібропотоків. Демпфірування задавалося в'язким-пропорційним жорсткості. У такому випадку на основі (2) при одночастотному режимі отримуємо системи звичайних алгебраїчних рівнянь 2 (3) - [M]w u + [K]u = F з комплексними коефіцієнтами. Маси та пружні елементи ДГК вибиралися на основі алгоритмів оптимізації. Застосовувалися два алгоритми: 1) Алгоритм візуалізації цільової функції оптимізації - рівня вібрації платформи за параметрами задачі. 2) Генетичний алгоритм багатопараметричної оптимізації. 5 36737 Хоч перший алгоритм менш ефективний, однак він дозволяє проглянути зони зміни параметрів в малопараметричній постановці, і дає змогу дослідити такий параметр як робастність, тобто наявність достатнього околу позитивних значень віброзахисту в околі оптимальної точки. Нижче наведено (Фіг.5) приклад двопараметричної оптимізації (за частотами додаткових ДГК). Цільова функція при оптимізації задавалася у вигляді ( ) Fcil = maxf1 < w1 < f 2 w1 . (4) Тут один з ДГК налаштований на фіксовану частоту зовнішнього збурення w1 = 50гц , а частоти двох інши х налашто вані оптимальним чином. Оптимізація при невідомих динамічних характеристиках платформи. При невідомих динамічних характеристиках платформи, коли можлива присутність резонансних частот у заданому діапазоні, цільова функція при оптимізації задавалася у вигляді æ f2 ö ç ÷ Fcil = max f < w < f ç ò w1(f ) P(f )df ÷ , 1 1 2 çf ÷ è1 ø (5) де u3 - рівень вібрації платформи, f1, f2 - границі частотного діапазону, P - вагова функції, w1 перша власна частота. Параметри оптимізації: маси гасників m3 , m4 , і m5 , пружини k 3 ¸ k 5 , коефіцієнти демпфірування c 3 - c 5 . На Фіг.6 наведені оптимізовані АЧХ при різних значеннях власних частот fw коливань платформи у діапазоні f1 = 40c- 1 - f2 = 60c -1 . На основі визначених оптимальних інтегральних оптимальних параметрів розроблено конструкцію ДГК. По суті пружні елементи ДГК для досягнення ефективного вібропоглинання повинні 6 працювати при максимальних амплітудах коливань в зоні максимально допустимих напружень. Пружні елементи для додаткових поглиначів вибиралися ідентичними. Настоювання на частоти коливань відбувається за рахунок переміщення і фіксації маси ДГК в прорізі. Для зменшення габаритів ДГК і підвищення міцності пружні елементи вибиралися профільованими. На Фіг.6. показана оптимізований за міцністю та матеріалоємністю типовий пружний елемент ДГК. Оптимізація шаруватої пластини платформи. Як бачимо з Фіг.3 типова сталева платформа розмірами 2.0´1.8´0.01м має резонансні частоти, близькі до частоти зовнішнього збурення 50гц. Бажано відійти від цього частотного діапазону та збільшити демпфірувальні властивості платформи. Для цього вибиралася конструкція платформи у вигляді тришарової пластини з проміжковим демпфірувальним шаром (Фіг.1). На Фіг.8 наведена залежність демпфірування в пакеті залежно від товщини Hf верхнього жорсткого шару та різних співвідношеннях жорсткості Е1/Е2 демпфірувального та основного матеріалу. Отже, для зменшення рівнів вібрації машин доцільно застосовувати запропоновані нами ДГК. Для вирішення інженерної задачі оптимального проектування конструкції з ДГК треба вирішити ряд інженерних задач: оптимізація вібропоглинаючих властивостей ДГК у досить широкому частотному діапазоні, довговічність конструкції, її габарити та зважити на те, що нами наведено приклад конструкції ДГК, яка має перевагу над рядом широковживаних. Ця конструкція ДГК може бути застосована і як основа конструкції адаптивних ДГК. У подальшому ці алгоритми планується застосувати до таких машин, як автобус з низьким розташуванням підлоги, трейлери та великогабаритні і транспортні машини, спектр коливань яких достатньо густий в зоні частот зовнішніх збурень. 7 Комп’ютерна в ерстка М. Ломалова 36737 8 Підписне Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюVibration-absorbing platform
Автори англійськоюDiveiev Bohdan Mykhailovych, Vikovych Ihor Andriovych, Dubnevych Oleksandr Mykhailovych, Smolskyi Andrii Hryhorovych
Назва патенту російськоюВибропоглощающая платформа
Автори російськоюДивеев Богдан Михайлович, Викович Игорь Андреевич, Дубневич Александр Михайлович, Смольский Андрей Григорьевич
МПК / Мітки
МПК: F16F 7/10, B60G 13/00
Мітки: платформа, вібропоглинаюча
Код посилання
<a href="https://ua.patents.su/4-36737-vibropoglinayucha-platforma.html" target="_blank" rel="follow" title="База патентів України">Вібропоглинаюча платформа</a>
Платформа атракціону
Номер патенту: 9129
Опубліковано: 15.09.2005
Автор: Столяренко Едуард Михайлович
МПК: A63G 1/00
Мітки: атракціону, платформа
Формула / Реферат:
Платформа атракціону, що містить центральну вісь із обпертою на неї горизонтальною рухомою платформою, яка відрізняється тим, що платформа додатково оснащена колесами, які опираються на кільцеву доріжку, закріплену на розпірках, що підтримують центральну вісь, і мають елементи приводу встановлених на платформі фігур або кабін з пасажирами.
Вантажоприймальна платформа ваг
Номер патенту: 66033
Опубліковано: 15.04.2004
Автори: Браз Давид Леонідович, Альтман Ілля Аронович, Кулик Сергій Федорович
МПК: G01G 19/03, G01G 19/02
Мітки: платформа, вантажоприймальна, ваг
Формула / Реферат:
Вантажоприймальна платформа ваг, що містить горизонтально розташовану раму у вигляді зварної конструкції зі зв'язаних перемичками блоків коробчастого перерізу, горизонтально розташований настил, жорстко закріплений до верхньої частини рами, горизонтально розташовані опорні плити, жорстко зв'язані з рамою в місцях контакту з ваговими модулями ваг, яка відрізняється тим, що рама вантажоприймальної платформи виконана у вигляді зварної...
Морська занурена платформа
Номер патенту: 9306
Опубліковано: 15.09.2005
Автори: Кольченко Леонід Вікторович, Ленський Віктор Федорович, Іщенко Леонід Іванович, Потапов Віктор Михайлович, Карпов Павло Семенович
МПК: E02B 17/00
Мітки: платформа, морська, занурена
Формула / Реферат:
1. Морська занурена платформа, що має верхню споруду, встановлену за допомогою опорних колон на основі в вигляді понтонів, на яких змонтовані кронштейни з напрямними для пальового закріплення платформи на дні, яка відрізняється тим, що кронштейни змонтовані рівномірно по довжині понтонів в зонах розміщення міцних конструктивних елементів.2. Морська занурена платформа за п. 1, яка відрізняється тим, що кронштейни виконані...
Платформа турбоблока газоперекачувального агрегата
Номер патенту: 22975
Опубліковано: 25.04.2007
Автор: Кузьмін Сергій Вікторович
Мітки: платформа, агрегата, турбоблока, газоперекачувального
Формула / Реферат:
1. Платформа турбоблока газоперекачувального агрегата, що виконана у вигляді рамної конструкції, яка відрізняється тим, що платформа являє собою об'ємну рамну конструкцію з верхньою опорною і нижньою поверхнями, між якими знаходиться порожнина для розміщення в ній допоміжних пристроїв агрегата.2. Платформа за п. 1, яка відрізняється тим, що її порожнина розділена на чарунки.3. Платформа за пп. 1 та/або 2, яка відрізняється тим,...
Платформа головного блока ракети-носія
Номер патенту: 80457
Опубліковано: 25.09.2007
Автор: Матвієнко Сергій Анатолійович
МПК: B64G 1/64
Мітки: платформа, головного, блока, ракети-носія
Формула / Реферат:
Платформа головного блока ракети-носія, що містить розташовану на її внутрішній частині ізолюючу перегородку, яка відрізняється тим, що платформа має зовнішні півкільця, а внутрішня частина утримується знімними фіксаторами.
Попередній патент: Стенд для дослідження моделі гнучкого огородження судна на повітряній подушці
Наступний патент: Спосіб одержання паливної композиції
Випадковий патент: Спосіб шихтування доменної печі