Спосіб ультразвукового локаційного вимірювання відстані і пристрій для його реалізації
Номер патенту: 39336
Опубліковано: 15.06.2001
Автори: Гнітецький Віталій Анатолійович, Гнітецька Тетяна Віталіївна
Формула / Реферат
1. Спосіб ультразвукового локаційного вимірювання відстані, що включає випромінення і прийом ультразвукових зондуючих імпульсів, підсилення прийнятих імпульсів, формування вимірюваного інтервалу, формування підрахункових імпульсів, цифрове перетворення вимірюваного інтервалу за допомогою підрахункових імпульсів, усереднення і цифрову індикацію віддалі від акустичного датчика до вимірюваного рівня, який відрізняється тим, що формування підрахункових імпульсів включає збудження акустичних коливань в трубному резонаторі, розміщеному в прозвучуваному середовищі, на одній із його власних резонансних частот, прийом і підсилення сигналу коливань трубного резонатора та відстежування частоти сигналу трубного резонатора частотою генератора підрахункових імпульсів поділеною в N (N=1, 2, 3...) раз.
2. Пристрій для ультразвукового локаційного вимірювання відстані, який містить акустичний датчик з випромінювачем, приєднаним до виходу генератора зондуючих імпульсів, і приймач, з'єднаний виходом через попередній підсилювач з входом формувача вимірюваного інтервалу, вихід якого підключений до першого входу цифрового перетворювача вимірюваного інтервалу, вихід якого з'єднаний через блок усереднення з входом блоку цифрової індикації відстані від акустичного датчика до вимірюваного рівня, а також блок формування підрахункових імпульсів, вихід якого підключений до другого входу цифрового перетворювача вимірюваного інтервалу і синхронізатор підключений до синхровходів генератора зондуючих імпульсів, попереднього підсилювача, формувача вимірюваного інтервалу, усереднювача і блоку цифрової індикації, який відрізняється тим, що блок формування підрахункових імпульсів складається з генератора підрахункових імпульсів з схемою фазової автопідстройки частоти і трубного резонатора поміщеного в прозвучуване середовище з встановленими на ньому другим випромінювачем і другим приймачем сигналу, вихід якого через другий попередній підсилювач підключений до першого входу схеми фазової автопідстройки частоти генератора підрахункових імпульсів, а його вихід підключений до другого входу цифрового перетворювача вимірюваного інтервалу і входу подільника частоти на N (N=1, 2, 3...), вихід якого підключено до другого входу схеми фазової автопідстройки частоти генератора підрахункових імпульсів і через фільтр нижніх частот до входу другого випромінювача, встановленого на трубному резонаторі.
Текст
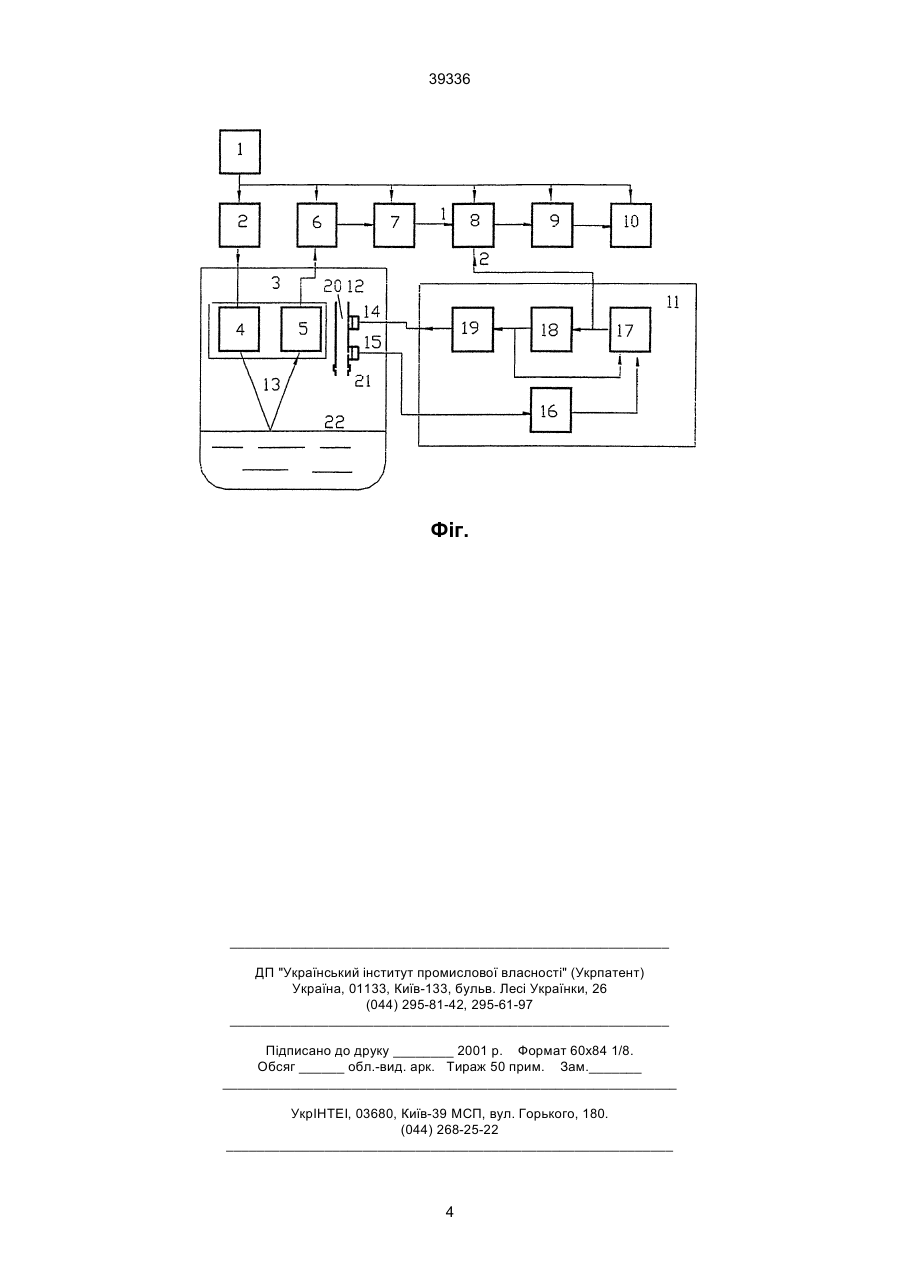
1. Спосіб ультразвукового локаційного вимірювання відстані, що включає випромінення і прийом ультразвукових зондуючих імпульсів, підсилення прийнятих імпульсів, формування вимірюваного інтервалу, формування підрахункових імпульсів, цифрове перетворення вимірюваного інтервалу за допомогою підрахункових імпульсів, усереднення і цифрову індикацію віддалі від акустичного датчика до вимірюваного рівня, який відрізняється тим, що формування підрахункових імпульсів включає збудження акустичних коливань в трубному резонаторі, розміщеному в прозвучуваному середовищі, на одній із його власних резонансних частот, прийом і підсилення сигналу коливань трубного резонатора та відстежування частоти сигналу трубного резонатора частотою генератора підрахункових імпульсів поділеною в N (N=1, 2, 3...) раз. 2. Пристрій для ультразвукового локаційного вимірювання відстані, який містить акустичний датчик з випромінювачем, приєднаним до виходу генератора зондуючих імпульсів, і приймач, з'єднаний ви A (54) СПОСІБ УЛЬТРАЗВУКОВОГО ЛОКАЦІЙНОГО ВИМІРЮВАННЯ ВІДСТАНІ І ПРИСТРІЙ ДЛЯ ЙОГО РЕАЛІЗАЦІЇ 39336 жній трубці) і підключених до генератора шумового сигналу, двох мікрофонів (по одному в кожній трубці), до кожного з яких послідовно підключені попередній підсилювач, аналого-цифровий перетворювач, блок першого перетворення Фур'є, блок логарифмування, блок другого перетворення Фур'є і блок розрахунку максимуму функції кепстра, причому виходи першого і другого блоків розрахунку максимуму кепстра підключені до входів блоку розрахунку рівня, вихід якого підключений до входу блоку індикації. Недоліком цього пристрою є складність розрахункового алгоритму, похибки при вимірюванні в середовищі з досить швидкою зміною газового складу через повільний газообмін між об'ємами вимірювальної і компенсаційної труб та зовнішнім середовищем. Пристрій складно використовувати в переносних рівнемірах та дальномірах, які працюють на відкритому просторі. Відомий спосіб ультразвукового локаційного вимірювання відстані і пристрій для його реалізації по патенту RU 2129703 G01F 23/28, який обрано як прототип. Спосіб полягає у випроміненні і прийомі ультразвукових імпульсів на вимірюваному та реперному відрізках, формуванні реперного і вимірюваного часових інтервалів, їх розподілі, цифровому перетворенні реперного інтервалу за допомогою підрахункових імпульсів, стабілізації кількості підрахункових імпульсів на реперному інтервалі шляхом корегування частоти їх слідування залежно від усередненого коду реперного відрізка, усередненні і цифровій індикації відстані від акустичного датчика до вимірюваного рівня. Недоліком способу є низький коефіцієнт використання ємкостей та цистерн через необхідність виділення простору (біля 1 м) перед датчиком для розміщення реперної відмітки. Можливий збій в роботі системи при переливі рідини вище реперної відмітки, обмежена можливість використання на цистернах малого розміру та в переносних дальномірах і рівнемірах. Недоліком є також залежність точності вимірів від стабільності бази реперної відмітки. Відомий пристрій ультразвукового локаційного вимірювання відстані за патентом RU 2129703 G01F 23/28, обраний за прототип. Пристрій складається з реперного відбивача, розміщеного на фіксованій відстані від акустичного датчика, датчика з випромінювачем підключеним до виходу генератора зондуючих імпульсів, і приймача, підключеного через підсилювач до входу роздільника реперного і вимірюваного сигналів, цифрового перетворювача реперного і вимірюваного інтервалів, блока формування підрахункових імпульсів, блока стабілізації кількості підрахункових імпульсів на реперному інтервалі, цифрового перетворювача вимірюваного інтервалу та блока цифрової індикації. Недоліком пристрою є апаратурна складність і залежність точності вимірювання від стабільності відстані до реперної відмітки, необхідність попереднього встановлення реперної відмітки. В основу винаходу поставлено задачу удосконалення ультразвукового локаційного вимірювача відстані шляхом нового принципу формування підрахункових імпульсів, що дозволяє спростити схему рівнеміра, покращити його експлуатаційні характеристики та розширити сферу його застосування. Поставлена задача виконується тим, що у запропонованому способі, що включає випромінення і прийом ультразвукових зондуючих імпульсів, підсилення прийнятих імпульсів, формування вимірюваного інтервалу, формування підрахункових імпульсів, цифрове перетворення вимірюваного інтервалу за допомогою підрахункових імпульсів, усереднення і цифрову індикацію віддалі від акустичного датчика до вимірюваного рівня, який відрізняється тим, що формування підрахункових імпульсів включає збудження акустичних коливань в трубному резонаторі, розміщеному в прозвучуваному середовищі, на одній із його власних резонансних частот, прийом і підсилення сигналу коливань трубного резонатора та відстежування частоти сигналу трубного резонатора частотою генератора підрахункових імпульсів поділеною в N (N=1, 2, 3...) paз. Поставлена задача виконується завдяки тому, що в пристрої для ультразвукового локаційного вимірювання відстані, що містить акустичний датчик з випромінювачем приєднаним до виходу генератора зондуючих імпульсів, і приймач з'єднаний виходом через попередній підсилювач з входом формувача вимірюваного інтервалу, вихід якого підключений до першого входу цифрового перетворювача вимірюваного інтервалу, вихід якого з'єднаний через блок усереднення з входом блоку цифрової індикації відстані від акустичного датчика до вимірюваного рівня, а також блок формування підрахункових імпульсів, вихід якого підключений до другого входу цифрового перетворювача вимірюваного інтервалу і синхронізатор підключений до синхровходів генератора зондуючих імпульсів, попереднього підсилювача, формувача вимірюваного інтервалу, усереднювача і блоку цифрової індикації, новим є те, що блок формування підрахункових імпульсів складається з генератора підрахункових імпульсів зі схемою фазової автопідстройки частоти (ФАПЧ) і трубного резонатора поміщеного в прозвучуваному середовищі з встановленими на ньому другим випромінювачем і другим приймачем сигналу, вихід якого через другий попередній підсилювач підключений до першого входу схеми фазової автопідстройки частоти генератора підрахункових імпульсів, а його вихід підключений до другого входу цифрового перетворювача вимірюваного інтервалу і входу подільника частоти на N, вихід якого підключений до другого входу схеми фазової автопідстройки частоти генератора підрахункових імпульсів і через фільтр нижніх частот (ФНЧ) до входу другого перетворювача встановленого на трубному резонаторі. Сенс запропонованого способу полягає в жорсткій прив'язці частоти підрахункових імпульсів до резонансної частоти трубного резонатора, розміщеного в середовищі, яке прозвучується. Як відомо, резонансна частота трубного резонатора fp при фіксованій довжині резонатора L однозначно визначається швидкістю розповсюдження звуку в цьому середовищі. Зокрема, для відкритої з двох сторін резонансної труби дійсне співвідношення KL = Ip , звідки для частоти першого резонансу І=1 одержимо f=C/2L, де K = 2pf C . Таким чином, період коливання резонансної частоти Т=2L/C при 2 39336 будь-якій швидкості звуку в прозвучуваному газовому середовищі завжди буде відповідати відрізку довжиною L у просторі. При відповідному виборі довжини резонатора, номера резонансної частоти і коефіцієнта поділу часового інтервалу Т в N раз, є змога встановити період слідування підрахункових імпульсів еквівалентним відрізку 1 см або 1 мм відстані, яка вимірюється. В цьому випадку вимірювання відстані до об'єкта, який зондується, зводиться до підрахунку кількості підрахункових імпульсів на вимірюваному інтервалі часу. Введення в пристрій, що заявляється, нових блоків з відповідними зв'язками дозволяє в порівнянні з аналогами та прототипом одержати нову якість, а саме значно спростити алгоритм роботи пристрою і його структурну схему, що дає можливість покращити експлуатаційні характеристики пристрою, відкривається можливість завдяки малим розмірам трубного резонатора (10-30 см) використовувати його на резервуарах малих розмірів, а також в портативних переносних дальномірах, які працюють у відкритому чи обмеженому просторі (наприклад, в шахтах). На фігурі приведена структурна схема пристрою ультразвукового локаційного вимірювання відстані. Пристрій містить синхронізатор 1, генератор зондуючих імпульсів 2, датчик 3 із випромінювачем 4 і приймачем 5, попередній підсилювач 6, формувач вимірюваного інтервалу 7, цифровий перетворювач вимірюваного інтервалу 8, блок усереднення 9, індикатор 10, блок формування підрахункових імпульсів 11, трубний резонатор 12, розміщений в прозвучуваному середовищі 13 з встановленими на ньому другим випромінювачем 14, другим приймачем 15, другий попередній підсилювач 16, генератор підрахункових імпульсів з системою ФАПЧ 17, подільник частоти імпульсів на N 18 і ФНЧ 19. Вихід синхронізатора 1 з'єднаний зі синхровходами генератора зондуючих імпульсів 2 попереднього підсилювача 6, формувача вимірюваного інтервалу 7, цифрового перетворювача випромінюваного інтервалу 8, блоку усереднення 9 і індикатора 10. Вихід генератора зондуючих імпульсів 2 з'єднаний зі входом випромінювача 4, а до виходу приймача 5 послідовно підключені попередній підсилювач 6, формувач вимірюваного інтервалу 7, цифровий перетворювач 8, блок усереднення 9 і індикатор 10. Блок формування підрахункових імпульсів складається з генератора підрахункових імпульсів 17, вихід якого підключений до другого входу цифрового перетворювача вимірюваного інтервалу 8 і виходу подільника частоти на N 18, вихід якого підключено до першого входу ФАПЧ генератора 17 і через ФНЧ 19 приєднаний до входу другого випромінювача 14 встановленого на трубному резонаторі 12. Вихід другого приймача 15, також встановленого на резонаторі 12, через другий попередній підсилювач 16 підключений до другого входу ФАПЧ генератора 17. Трубний резонатор 12 має вигляд трубки, на циліндричній поверхні якого встановлено випроміню вач 14 і приймач 15, які зв'язані з внутрішнім об'ємом резонаторної трубки через отвори 20. Для підстройки частоти трубного резонатора на одному з його кінців є різьбова насадка 21, прокручування якої дозволяє деякою мірою міняти довжину резонатора L, а, значить, і частоту підрахункових імпульсів. Розглянемо спосіб ультразвукового локаційного вимірювання відстані на прикладі роботи такого пристрою. Пристрій працює так. При включенні живлення генератор підрахункових імпульсів 17 збуджується на частоті близькій до Nfp. Після ділення на N у подільнику 18 сигнал частоти fp+ Δf через ФНЧ 19, який послаблює вищі гармоніки сигналу, приходить на випромінювач 14, збуджуючи в резонаторі 12 коливання частоти fp+ Δf . Приймач 15 приймає ці коливання, але вже з деяким зсувом по фазі на кут Δj , зумовленим неспівпаданням частоти збудження резонатора з його власною резонансною частотою. З виходу приймача 15 через підсилювач 16 цей сигнал потрапляє на другий вхід схеми ФАПЧ генератора 17. Схема ФАПЧ генератора 17 порівнює фази сигналу на першому і другому входах і формує сигнал похибки, під дією якого відбувається корекція частоти генератора підрахункових імпульсів 17 до повного узгодження фаз сигналів на першому і другому входах системи ФАПЧ. При виконанні умови fp=fcч/N проходить автозахват частоти схемою ФАПЧ генератора 17 і подальше відслідковування змін резонансної частоти трубного резонатора, обумовлених зміною фізичних параметрів прозвучуваного середовища. Далі після приходу синхроімпульсів на входи блоків 6, 7, 8, 9 і 10 і вхід генератора зондуючих імпульсів 2 відбувається генерація і випромінювання акустичного імпульсу, який з деякою затримкою в часі на Δt u , рівною часу розповсюдження акустичного імпульсу від випромінювача 4 до відбиваючої поверхні 22 і назад, приймаються приймачем 5 і через попередній підсилювач 6 потрапляє на вхід формувача вимірюваного інтервалу 7. Формувач 7 виробляє імпульс тривалістю tи, початок якого відповідає моменту випромінення акустичного зондуючого імпульсу, а кінець - моменту його прийому. Імпульс тривалістью tи потрапляє на перший вхід цифрового перетворювача вимірюваного інтервалу 8, при цьому на другий вхід приходять імпульси з частотою fcч=N·fp. Цифровий перетворювач 8 проводить підрахунок кількості підрахункових імпульсів на вимірюваному інтервалі часу і передає цифровий код, який відповідає відстані від датчика 3 до відбиваючої поверхні 22, в блок усереднення 9. Після усереднення результат виміру висвічується на табло індикатора 10. Світове табло 10 по бажанню оператора висвічує десяткове число, яке відповідає відстані від акустичного датчика до поверхні рідини (сипучої речовини) або глибині пласту рідини (сипучої речовини) при відомій відстані від датчика до дна резервуара. 3 39336 Фіг. __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2001 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 4
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for ultrasonic location measurement of distance and appliance for its implementation
Автори англійськоюHnitetskyi Vitalii Anatoliiovych, Gnitetska Tetiana Vitaliivna
Назва патенту російськоюСпособ ультразвукового локационного измерения расстояния и устройство для его реализации
Автори російськоюГнитецкий Виталий Анатольевич, Гнитецкая Татьяна Витальевна
МПК / Мітки
МПК: G01F 23/296, G01F 23/28
Мітки: реалізації, пристрій, ультразвукового, спосіб, вимірювання, відстані, локаційного
Код посилання
<a href="https://ua.patents.su/4-39336-sposib-ultrazvukovogo-lokacijjnogo-vimiryuvannya-vidstani-i-pristrijj-dlya-jjogo-realizaci.html" target="_blank" rel="follow" title="База патентів України">Спосіб ультразвукового локаційного вимірювання відстані і пристрій для його реалізації</a>
Спосіб ультразвукового контролю хімічного складу навколишнього середовища та пристрій для його реалізації
Номер патенту: 33870
Опубліковано: 15.02.2001
Автори: Зубченко Олександр Миколайович, Соченко Петро Степанович, Зеленков Олександр Аврамович
МПК: G01N 29/07, G01N 29/024
Мітки: середовища, навколишнього, складу, хімічного, реалізації, ультразвукового, контролю, спосіб, пристрій
Текст:
...означене прямокутником, приймається приймачем 7, підсилюється підсилювачем 8 та детектирується детектором 9 і надходить до першого входу блока 4 вимірювача затримки. На фіг. 3 показана можлива реалізація блока 4 вимірювання затримки. Імпульс з генератора 1, який формується в момент запуску процесу вимірювань, надходить на другі входи першого 10 та другого 11 тригерів, які переключаються в стан, що відкриває першу 12 та другу 13 схему збігу...
Спосіб вимірювання ваги на гаку та пристрій для його реалізації
Номер патенту: 21235
Опубліковано: 04.11.1997
Автори: Калужний Богдан Семенович, Мартинчук Анастасія Данилівна, Денис Богдан Дмитрович, Рибчич Ілля Йосипович
МПК: E21B 47/00
Мітки: гаку, пристрій, реалізації, вимірювання, спосіб, ваги
Формула / Реферат:
1. Спосіб вимірювання ваги на гаку, що базується на визначенні величини натягу нерухомого кінця талевої линви, який відрізняється тим, що як пружний чутливий елемент використовують талеву линву, визначають її величину розтягу через кут повороту нерухомого шківа кронблока, для чого перед спуском бурильного інструменту, при відсутності ваги на гаку, фіксують умовний нуль кута повороту, компонують низ бурильної колони з наперед визначеним...
Фазовий спосіб вимірювання відстані до нерухомого предмета і пристрій для його здійснення
Номер патенту: 21472
Опубліковано: 16.12.1997
Автори: Дубровний Віктор Опанасович, Кондратов Владислав Тимофійович, Ментковський Юзеф Леонович, Скрипник Юрій Олексійович, Головко Дмитро Богданович
МПК: G01C 3/08
Мітки: фазовий, пристрій, нерухомого, спосіб, вимірювання, здійснення, відстані, предмета
Формула / Реферат:
1. Фазовий спосіб вимірювання відстані до нерухомого предмета, який полягає у створенні зондуючого променя з двох оптичних когерентних випромінювань, близьких за частотою, опроміненні контрольованого предмета зондуючим променем, прийомі відбитого променя, його фотоелектричному перетворенні, виділенні електричного сигналу різницевої частоти, вимірюванні різниці фаз електричних сигналів і визначенні відстані за аналітичним співвідношенням,...
Спосіб магнітотерапевтичного лікування хронічного простатиту та пристрій для його реалізації
Номер патенту: 22844
Опубліковано: 21.04.1998
Автори: Бородюк Олег Олександрович, Татарин Василь Ярославович
МПК: A61N 2/04
Мітки: простатиту, реалізації, хронічного, магнітотерапевтичного, спосіб, пристрій, лікування
Формула / Реферат:
1. Спосіб магнітотерапевтичного лікування хронічного простатиту, який полягає в тому, що на пацієнта діють пакетами імпульсів магнітного поля у вигляді згасаючого коливання амплітудою 0,12-18 мкТл з періодом 20-1100 не і декрементом згасання не менше 0,05, який відрізняється тим, що частота повторення пакетів Імпульсів становить 25-30 Гц.2. Пристрій для лікування хронічного простатиту, який складається з послідовно з'єднаних формувача...
Спосіб вимірювання пікової напруги електричних імпульсів та пристрій для його реалізації
Номер патенту: 14790
Опубліковано: 18.02.1997
Автори: Тимофеєв Євген Петрович, Балабан Василь Михайлович, Соловйов Валентин Сергійович
МПК: G01R 19/04
Мітки: імпульсів, спосіб, електричних, пристрій, вимірювання, напруги, реалізації, пікової
Формула / Реферат:
1. Способ измерения пикового напряжения электрических импульсов, при котором один электрический импульс длительностью подают на вход диодно-емкостной запоминающей ячейки с постоянной цепи заряда и по величине напряжения на конденсаторе определяют пиковое напряжение электрического импульса отличающийся тем, что исходный электрический импульс преобразуют в два электрических импульса и такой же длительности и одинаковой амплитуды, равной...
Попередній патент: Спосіб виготовлення конденсаторів на подвійному електричному шарі з збалансованими електродами
Наступний патент: Спосіб стимулювання точок акупунктури
Випадковий патент: Спосіб пластики твердої мозкової оболонки людини