Молот безшаботний гідравлічний вертикальний


Формула / Реферат
Молот безшаботний гідравлічний вертикальний, що містить верхню бабу з боковими амортизаторами, перехідними плитами і плунжерами, нижню бабу з центральним амортизатором, перехідною плитою і плунжером та бак гідравлічного зв'язку верхньої та нижньої баб, який відрізняється тим, що на верхню поверхню бака гідравлічного зв'язку верхньої і нижньої баб, співвісно з боковими плунжерами, встановлені привідні гідравлічні циліндри однобічної дії, поршні яких закріплені на бокових плунжерах верхньої баби, на фундамент молота, симетрично до вертикальної осі нижньої баби, встановлені два привідних циліндри однобічної дії, плунжери яких взаємодіють з перехідною плитою нижньої баби.
Текст
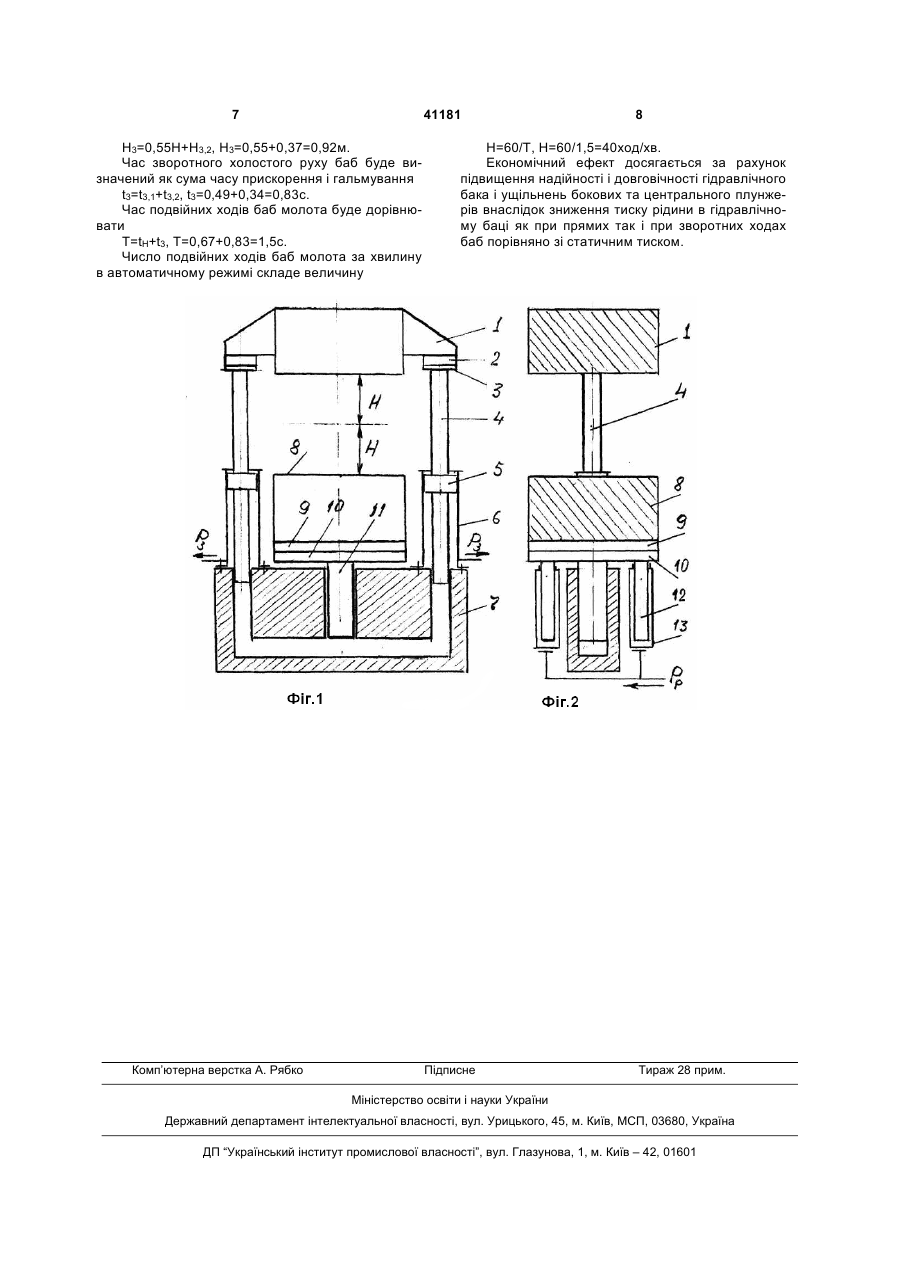
Молот безшаботний гідравлічний вертикальний, що містить верхню бабу з боковими амортизаторами, перехідними плитами і плунжерами, нижню бабу з центральним амортизатором, пере 3 В статичному положенні баби нерухомі, що забезпечується рівністю площі поперечного перерізу центрального плунжера 11 і суми площ поперечних перерізів двох бокових плунжерів 4. Тиск рідини при нерухомих бабах визначається залежністю gMH gMB P= = , (1) SH 2SB де g - прискорення вільного падіння; SH, SВ - площі нижнього і бокових плунжерів; МН, МВ - маси нижньої і верхньої баб з прикріпленими до них деталями. При проектуванні молота тиск рідини в баці 13 гідравлічного зв'язку руху баб задається, з рівняння (1) визначимо площі плунжерів: нижнього SH=gMH/P, бокового SB=gMB/(2P) (2) і так як маси верхньої і нижньої баб однакові, то SH=2SB. Прямий холостий рух, який закінчується ударом, здійснюється з вихідного положення, що представлено на кресленні. Рівняння руху має вигляд 2PPSn=γП(MH+MB)+FM+2PЗSP, (3) р де Рр - робочий тиск рідини, яка подається з насосно-акумуляторної станції; Sn - площа перерізу нижньої частини центрального плунжера 12, який знаходиться в нижньому привідному циліндрі 13; γП - прискорення баб при прямому холостому русі; FМ - сила тертя в напрямних баб і ущільненнях плунжерів; PЗ - тиск зливу відпрацьованої рідини; SР - кільцева площа бокового привідного поршня 5, який знаходиться в боковому привідному циліндрі 6. Не надаючи переваги ні прямому ні зворотному холостим рухам, задають однакові значення максимальних прискорень баб при прямому і зворотному холостих рухах, тобто γП=γВ, (4) що забезпечується умовою рівності площ нижнього привідного плунжера 12 і кільцевого поршня 5 Sn=SP. (5) З урахуванням викладеного, площу перерізу нижнього привідного плунжера 12 можна визначити із рівняння (3) як γ (М + МВ ) + FM Sn = П Н . (6) 2(PР − РЗ ) Прямий холостий рух забезпечується подачею робочої рідини високого тиску в нижні привідні циліндра 13, бокові привідні циліндри 6 з'єднуються зі зливним баком, тиск відпрацьованої рідини низький, його значення визначається тиском рідини в зливному баці насосно-акумуляторної станції приводу молота. Нижня баба рухається вверх з прискоренням γП, тиск рідини в гідравлічному баці 7 буде визначатись як М (g − γП ) РН = Н . (7) SH 41181 4 Порівнюючи значення тиску рідини в гідравлічному баці 7 при нерухомих бабах (1) з тиском при прямому холостому русі (7), находимо що тиск рідини в гідравлічному баці 7 зменшується на величину gMH − (g − γП )MH γПМН ∆PН = = . (8) SH SH Зниження тиску в гідравлічному баці 7 забезпечить підвищення надійності та довготривалості самого баку і ущільнювачів центрального і бокових плунжерів. Енергія удару молота буде визначатись кінетичною енергією в кінці прямого холостого руху 2 Z=(MH+MB)V /2, (9) де V - швидкість баб в кінці прямого холостого руху. Прямий холостий рух закінчується ударом, в процесі якого здійснюється штампування поковки. Зворотний холостий рух починається після удару. Гідророзподільник (на кресленні не позначений) переключає нижні привідні циліндри 13 на злив, в бокові привідні циліндри 6 подає рідину під робочим (високим) тиском. На бокові поршні 5, плунжери 4 і верхню бабу 1 буде діяти спрямована вверх сила Р1=2PPSP-FM-2PЗSn, (10) котра приводить до руху верхню бабу з прискоренням Р1 γЗ = , (11) МН + МВ при цьому тиск рідини в гідравлічному баці 7 буде рівний М (g − γ З ) РВ = В . (12) 2SB Зниження тиску рідини при зворотному холостому русі баб порівняно з тиском в статичному положенні (1) буде дорівнювати gMB (g − γ З )MB γ ЗМВ ∆PB = − = . (13) 2SB 2SB 2SB Зниження тиску в гідравлічному баці 7 при зворотному холостому русі баб порівняно з тиском в статичному положенні, забезпечить підвищення надійності та довготривалості самого баку і ущільнювачів центрального і бокового плунжерів. Після завершення зворотного холостого руху цикл повторюється. Приклад конкретного виконання: - маса баб і прикріплених до них деталей МН=МВ=100000 кг (100 т); - максимальне переміщення кожної баби Н=1,0м; - швидкість баб при ударі V=3м/c; - тиск робочої рідини РР=32,0МПа; - тиск відпрацьованої рідини при зливі РЗ=0,6МПа; - тиск рідини в гідравлічному баці зв'язку верхньої і нижньої баб при нерухомих бабах (статичний тиск) РСТ=32,0МПа. Енергія удару безшаботного молота розраховується за залежністю (9) і після підстановки вихідних даних в (9) одержимо 5 41181 6 32 = 9 ⋅ 105 Дж (900 кДж ) . 2 При відомих величині швидкості баби в момент удару V=3м/c і максимального переміщення Н=1,0м прискорення руху баби при прямому холостому русі, який закінчується ударом, визначиться по залежності 4SПР 4 ⋅ 0,033 , dПР = = 0,21м . π 3,14 Зниження тиску рідини в гідравлічному баці 7 при прямому холостому русі визначиться по (8) γ M ∆P = Π H , SH 32 V2 = 4,5 м / с 2 . ; γΠ = 2 ⋅ 1,0 2H Час прямого холостого руху баб буде дорівнювати 3 V = 0,67 c . tH = , tH = 4,5 γH Площа перерізу нижнього привідного плунжера 13 визначиться по (6) прийнявши силу тертя в направляючих баб і ущільненнях циліндрів рівною 10% від сили тяжіння баб 4,5 ⋅ 105 = 14,5 ⋅ 106 Па (14,5 МПа) . 0,031 Тиск рідини в гідравлічному баці 7 при прямому холостому русі баб буде рівний РП=32·106-14,5·106=17,5·106Па РП=Р-∆РП, (17,5МПа). Зворотний холостий рух баб забезпечується подачею робочої рідини високого тиску (32МПа) в бокові циліндри 6, нижні привідні циліндри 13 з'єднуються із зливною магістраллю, такий режим підтримується поки баби не пройдуть відстань рівну 0,55Н, цей період характеризується прискореним рухом нижньої баби вниз, верхньої вверх. З урахуванням (4), (5) прискорення руху буде таким же як 2 і при прямому холостому русі, γ3,1=4,5м/с . Зниження тиску рідини в баці 7 буде таким же як і при прямому холостому русі. Рух баб буде продовжуватись протягом часу, який визначається залежністю Z=(105+105) γΠ = 4,5 ⋅ 2 ⋅ 105 + 0,1⋅ 9,8 ⋅ 2 ⋅ 105 = 0,0175 м2 , 2(32 ⋅ 10 6 − 0,6 ⋅ 10 6 ) діаметр нижнього провідного плунжера 13 буде дорівнювати SΠ = 4SH 4 ⋅ 0,0175 , dн = = 0,15 м . π 3,14 Площа перерізу центрального плунжера 11 вузла зв'язку баб визначиться по (2) dн = 9,8 ⋅ 10 5 = 0,031м2 , 32 ⋅ 106 а його діаметр SH = 4SH 4 ⋅ 0,031 , dн = = 0,2 м . π 3,14 Площа перерізу бокового плунжера 4 з урахуванням (2) визначиться як SB=0,5SH, SB=0,5·0,031=0,0155м2, а його діаметр dн = 4SB 4 ⋅ 0,155 , dB = = 0,14 м . π 3,14 Площа перерізу поршня 5 приводу молота на зворотний холостий рух визначиться як сума його кільцевої площі SP і площі SB бокового плунжера 4, тобто SПР=SP+SB, SПР=0,0155+0,0175=0,033 м2, діаметр поршня 5 визначається як dB = γ 3,2 = dПР = ∆PΠ = t 3,1 = 2 ⋅ 0,55H , t 3,1 = γ 3,1 за цей час баби набудуть швидкість рівну V3,1=γ3,1t3,1, V3,1=4,5·0,49=2,2м/с. Для зупинки баб в вихідних (крайніх) положеннях гідравлічний розподілювач відключає циліндри 5 від магістралі високого тиску і з'єднує їх зі зливом, а нижні привідні циліндри 13 відключає від зливної магістралі і з'єднує їх з магістраллю високого тиску. Прискорення руху баб при гальмуванні визначається залежністю 2Sn (PP − PЗ ) + FTP γ 3,2 = (14) MH + MB і після підстановки числових значень в (14) прискорення руху баб при гальмуванні буде дорівнювати 2 ⋅ 0,0175(32 ⋅ 10 6 − 0,6 ⋅ 10 6 ) + 0,1⋅ 9,8 ⋅ 2 ⋅ 10 5 2 ⋅ 10 5 зниження тиску рідини в гідравлічному баці 7 під час гальмування визначиться по (13) як γ M ∆ΡВ = 3,2 B , 2SB 6,5 ⋅ 105 ∆ΡВ = = 18,5 ⋅ 106 Па (18,5 МПа) . 0,035 Режим гальмування руху баб буде продовжуватись до зниження їх швидкостей до нуля, що відповідає умові V3,1-γ3,2t3,2=0. (15) 2 ⋅ 0,55 ⋅ 1,0 = 0,49 c , 4,5 = 6,5 м / с 2 , Із (15) визначимо час руху при гальмуванні V 2,2 = 0,34 c . t 3,2 = 3,1 , t 3,2 = 6,5 λ3,2 Величина ходу кожної баби за час гальмування визначиться по залежності 6,5 ⋅ 0,34 2 = 0,37 м . 2 Переміщення кожної баби при зворотному холостому русі являється сумою переміщень на етапах прискореного руху і гальмування H3,2 = 2,2 ⋅ 0,34 − 7 41181 Н3=0,55Н+Н3,2, Н3=0,55+0,37=0,92м. Час зворотного холостого руху баб буде визначений як сума часу прискорення і гальмування t3=t3,1+t3,2, t3=0,49+0,34=0,83с. Час подвійних ходів баб молота буде дорівнювати Т=tH+t3, T=0,67+0,83=1,5с. Число подвійних ходів баб молота за хвилину в автоматичному режимі складе величину Комп’ютерна верстка А. Рябко 8 Н=60/Т, Н=60/1,5=40ход/хв. Економічний ефект досягається за рахунок підвищення надійності і довговічності гідравлічного бака і ущільнень бокових та центрального плунжерів внаслідок зниження тиску рідини в гідравлічному баці як при прямих так і при зворотних ходах баб порівняно зі статичним тиском. Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюHydraulic vertical no-anvil hammer
Автори англійськоюRei Anton Romanovych, Rei Myroslava Romanivna
Назва патенту російськоюМолот бесшаботный гидравлический вертикальный
Автори російськоюРей Антон Романович, Рей Мирослава Романовна
МПК / Мітки
МПК: B21J 17/00
Мітки: молот, вертикальний, гідравлічний, безшаботний
Код посилання
<a href="https://ua.patents.su/4-41181-molot-bezshabotnijj-gidravlichnijj-vertikalnijj.html" target="_blank" rel="follow" title="База патентів України">Молот безшаботний гідравлічний вертикальний</a>
Безшаботний вертикальний гідравлічний молот
Номер патенту: 35920
Опубліковано: 10.10.2008
Автори: Рей Роман Іванович, Рей Антон Романович
МПК: B21J 7/00
Мітки: безшаботний, вертикальний, гідравлічний, молот
Формула / Реферат:
Безшаботний вертикальний гідравлічний молот, що містить верхню бабу з боковими амортизаторами, перехідними плитами і плунжерами, нижню бабу з центральним амортизатором, перехідною плитою і плунжером, гідравлічний бак зв'язку верхньої та нижньої баби, який відрізняється тим, що нижня частина центрального плунжера, яка має площу перерізу, меншу за верхню частину, проходить через отвір в нижній частині гідравлічного бака і розміщується в...
Безшаботний вертикальний гідравлічний молот
Номер патенту: 35919
Опубліковано: 10.10.2008
Автори: Рей Мирослава Романівна, Рей Антон Романович
МПК: B21J 7/00
Мітки: вертикальний, молот, гідравлічний, безшаботний
Формула / Реферат:
Безшаботний вертикальний гідравлічний молот, що містить верхню бабу з боковими амортизаторами, перехідними плитами і плунжерами, нижню бабу з центральним амортизатором, перехідною плитою і плунжером, гідравлічний бак зв'язку верхньої та нижньої баби, який відрізняється тим, що всі три плунжери виготовлені у вигляді ступінчатих циліндрів, нижні частини яких мають площі перерізів, менші за площі перерізів верхніх частин, гідравлічний бак в...
Безшаботний вертикальний гідравлічний молот
Номер патенту: 30386
Опубліковано: 25.02.2008
Автор: Рей Антон Романович
МПК: B21J 7/00
Мітки: вертикальний, гідравлічний, молот, безшаботний
Формула / Реферат:
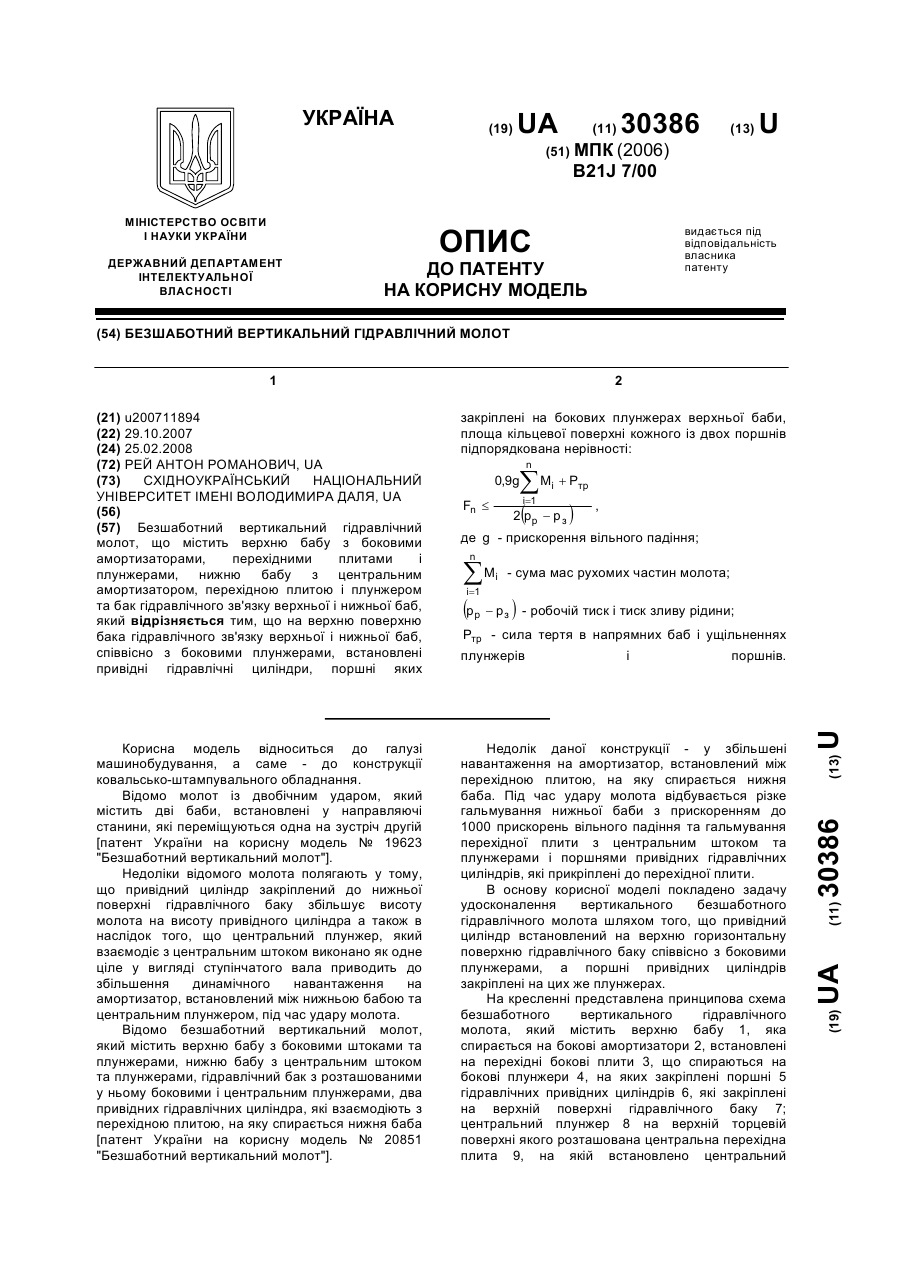
Безшаботний вертикальний гідравлічний молот, що містить верхню бабу з боковими амортизаторами, перехідними плитами і плунжерами, нижню бабу з центральним амортизатором, перехідною плитою і плунжером та бак гідравлічного зв'язку верхньої і нижньої баб, який відрізняється тим, що на верхню поверхню бака гідравлічного зв'язку верхньої і нижньої баб, співвісно з боковими плунжерами, встановлені привідні гідравлічні циліндри, поршні яких...
Безшаботний вертикальний молот
Номер патенту: 20851
Опубліковано: 15.02.2007
Автори: Рей Роман Іванович, Гутько Юрій Іванович, Монятовський Станислав Степанович
МПК: B21J 7/00
Мітки: молот, вертикальний, безшаботний
Формула / Реферат:
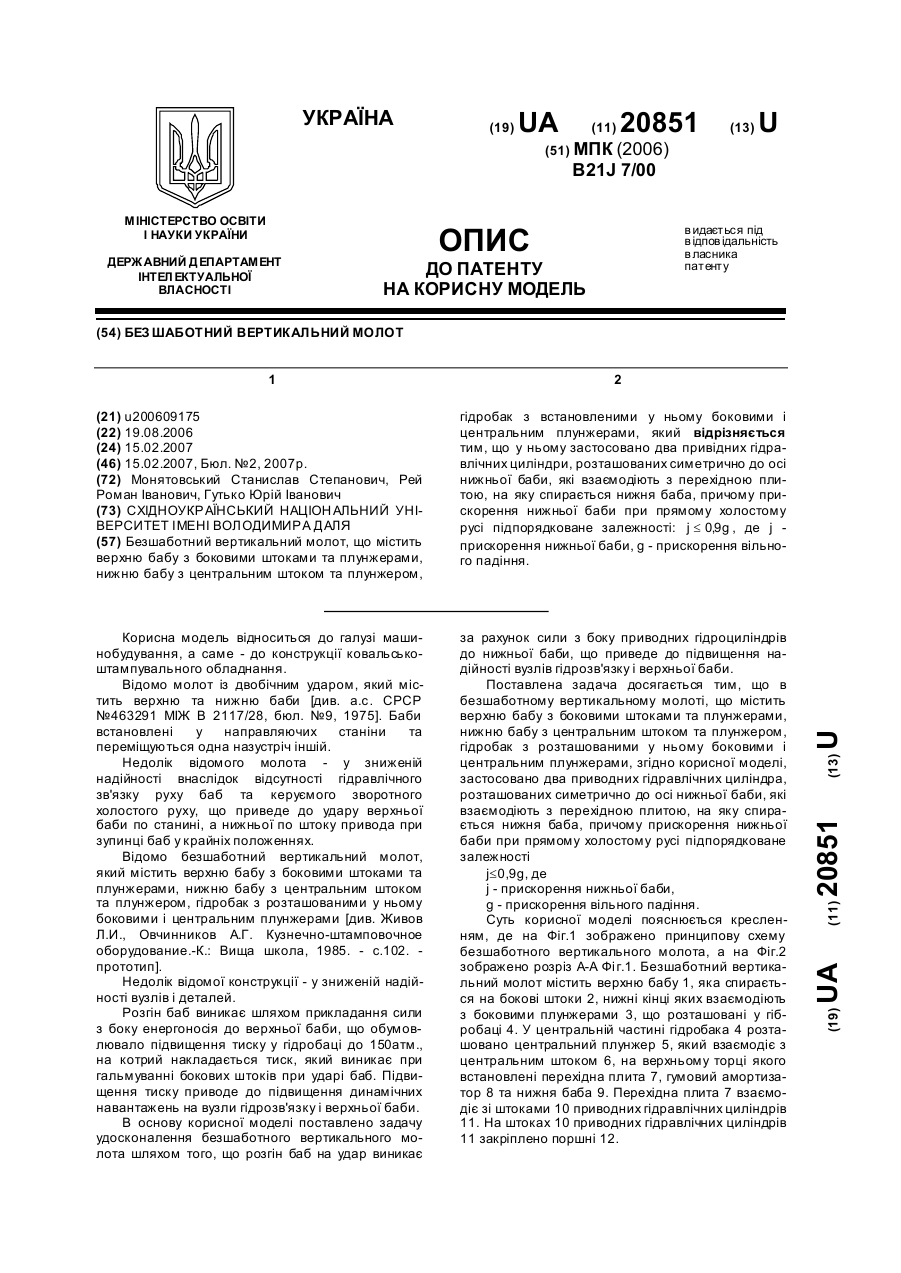
Безшаботний вертикальний молот, що містить верхню бабу з боковими штоками та плунжерами, нижню бабу з центральним штоком та плунжером, гідробак з встановленими у ньому боковими і центральним плунжерами, який відрізняється тим, що у ньому застосовано два привідних гідравлічних циліндри, розташованих симетрично до осі нижньої баби, які взаємодіють з перехідною плитою, на яку спирається нижня баба, причому прискорення нижньої баби при прямому...
Безшаботний вертикальний молот
Номер патенту: 19623
Опубліковано: 15.12.2006
Автори: Гутько Юрій Іванович, Монятовський Станислав Степанович, Рей Роман Іванович
МПК: B21J 7/00
Мітки: вертикальний, безшаботний, молот
Формула / Реферат:
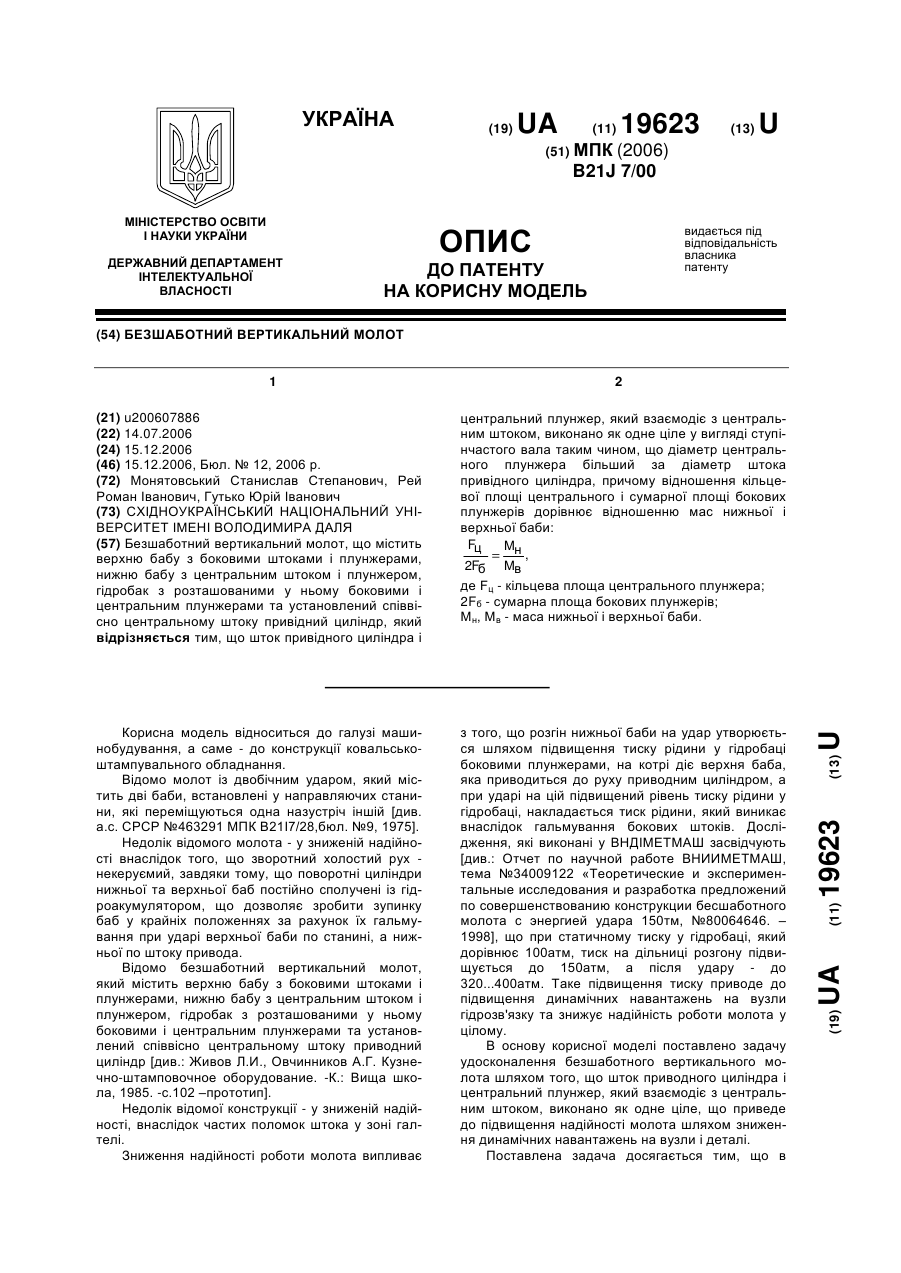
Безшаботний вертикальний молот, що містить верхню бабу з боковими штоками і плунжерами, нижню бабу з центральним штоком і плунжером, гідробак з розташованими у ньому боковими і центральним плунжерами та установлений співвісно центральному штоку привідний циліндр, який відрізняється тим, що шток привідного циліндра і центральний плунжер, який взаємодіє з центральним штоком, виконано як одне ціле у вигляді ступінчастого вала таким чином, що...
Попередній патент: Циліндричне решето
Наступний патент: Пристрій для високошвидкісного формування пакувань із заданими структурними параметрами
Випадковий патент: Виконавчий циліндр гідроприводу і гідроавтоматики