Безшаботний вертикальний молот
Номер патенту: 20851
Опубліковано: 15.02.2007
Автори: Рей Роман Іванович, Гутько Юрій Іванович, Монятовський Станислав Степанович

Формула / Реферат
Безшаботний вертикальний молот, що містить верхню бабу з боковими штоками та плунжерами, нижню бабу з центральним штоком та плунжером, гідробак з встановленими у ньому боковими і центральним плунжерами, який відрізняється тим, що у ньому застосовано два привідних гідравлічних циліндри, розташованих симетрично до осі нижньої баби, які взаємодіють з перехідною плитою, на яку спирається нижня баба, причому прискорення нижньої баби при прямому холостому русі підпорядковане залежності: ![]() , де j - прискорення нижньої баби, g - прискорення вільного падіння.
, де j - прискорення нижньої баби, g - прискорення вільного падіння.
Текст
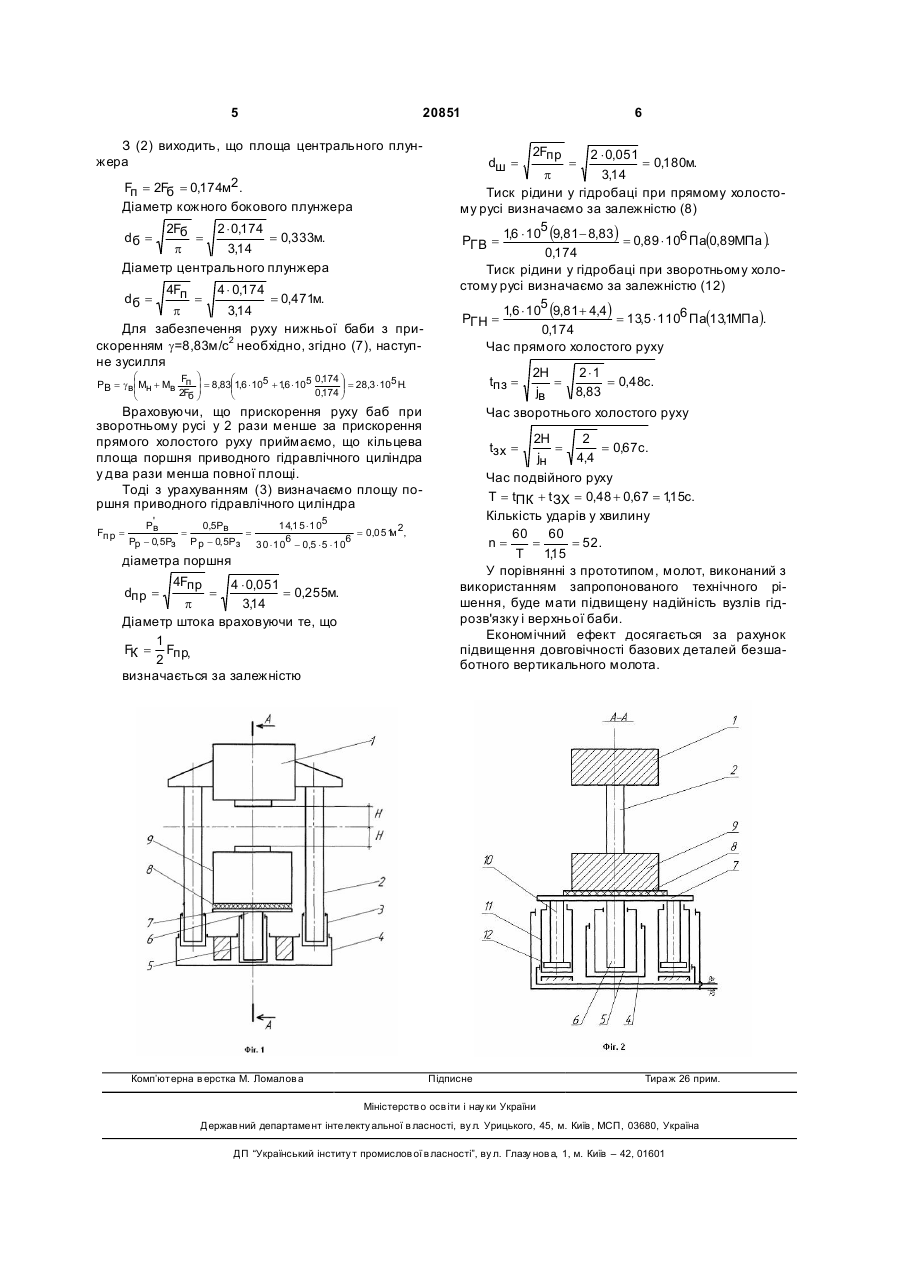
Безшаботний вертикальний молот, що містить верхню бабу з боковими штоками та плунжерами, нижню бабу з центральним штоком та плунжером, 3 20851 Безшаботний вертикальний молот працює наступним чином. У вихідному положенні, котре відповідає кресленням, баби 1 та 9 нерухомі. Це досягається тим, що верхня баба 1 за допомогою штоків 2 і плунжерів 3 (площа кожного Fб ), а нижня баба 9, яка взаємодіє з гумовим амортизатором 8 та перехідною плитою 7, за допомогою центрального штока 6 і плунжера 5 (площа Fп) утворюють у гідробаці 4 однаковий тиск, що дорівнює gMв gMн РГ = = , (1) 2Fб Fп де Мв , Mн - маса верхньої 1 та нижньої 7 баби, g - прискорення вільного падіння. З (1) маємо Mн F = п . (2) Мв 2Fб Прямий холостий рух, котрий закінчується ударом, здійснюється з вихідного положення, що подано на кресленні. Рідина із гідророзподільника (не показаний) під робочим тиском подається до нижніх порожнин приводних гідравлічних циліндрів 11, із верхньої порожнини цих циліндрів рідина подається до зливу. На шток 10 приводного гідравлічного циліндра 11 діє зусилля, що має напрямок уверх ¢ Pв = РрFпр - Р зF (3) к Де Р¢ , Рз - тиск робочої і зливної магістралі; в F , Fк - повна та кільцева площі поршня 12. пр На центральний шток 6 діє зусилля Рв = 2РрF - 2РзF . пр к (4) Нижня баба 9 рухається прискорено уверх, при цьому центральний плунжер 5 підіймається увер х, визволяючи у гідробаці 4 об'єм, який дорівнює добутку кільцевої площі 2Fк до висоти підйому. Підкоряючись умові постійності об'єму, бокові плунжери 3 опускаються, компенсуючи цей об'єм. Математично цю умову можна подати у ви гляді DHHFП = DНK 2FK = DHB 2Fб , (5) DHH , DHB , DHK - елементарні переміщення нижньої 9 і верхньої 1 баби та поршня 12 приводного гідравличного циліндра 11. Прискорення руху нижньої баби 7 (6) jВ£0,9g. Відношення зусилля, що діє на центральний шток 6 до прискорення нижньої баби 9 має вигляд Pв F = МН + МВ п . (7) jв 2Fб Тиск рідини у гідробаці 4 М (g - jв ) PГВ = н (8) Fп Після закінчення прямого холостого руху, у процесі якого здійснюється штампування поковки, починається зворотній холостий рух. Повернення баба 1 та 9 у ви хідне положення здійснюється наступним чином. 4 Гідророзподільник (не показаний) переключає нижні порожнини приводних гідравлічних циліндрів 11 до зливу, а у верхні порожнини подає рідину. На шток 10 приводного гідравлічного циліндра 11 діє зусилля, що має напрямок униз ¢ Pн = РрFк - РзFпр (9) На центральний шток 6 діє зусилля Pн = 2РрFк - 2РзF пр (10) котре приводить у рух нижню бабу 7 з прискоренням (11) jН£0,9g. Тиск рідини у гідробаці 4 дорівнює М ( g - jн ) PГH = н (12) Fп Цей тиск вищий статичного та сила від дії на бокові плунжери 3 більш сили ваги верхньої баби 1, тому вона прискорено рухається уверх. Безшаботний вертикальний молот працює у режимі автоматичних послідовних ударів, або у кінці руху виконується зупинка баб 1 та 9 з послідуючим утриманням на вазі. При автоматичних послідовних ударах - верхні порожнини приводних гідравлічних циліндрів 11 переключаються до зливу, а нижні переключаються під робочий тиск. При наступному утриманні на вазі - гідророзподільник (не показаний) переключає нижні порожнини приводних гідравлічних циліндрів 11 до зливу. Приклад конкретного виконання Вихідні дані для розрахунку: Безшаботний вертикальний молот з енергією удара Z=1500кДж. Маси верхньої і нижньої баби дорівнюють: МВ= МН Швидкість кожної баби до удару Vy=3,1м/с. Робочий тиск рідини на приводних гідравлічних циліндрах Рр=300атм (30МПа). Тиск рідини у зливній магістралі Рз=5атм (0,5МПа). Тиск рідини у гідробаці при нерухомих бабах (статичний тиск) РГ=90атм (9МПа). Рух кожної баби Н=1,0м. При розрахунку приймаємо, що прискорення нижньої і верхньої баби при прямому холостому русі дорівнює j = 0,9g = 8,83м / с2. Енергія удара молота дорівнює V2 Z = Mв в + Мн 2 безшаботного вертикального 2 Vн , 2 враховуючи, що МВ= МН, VВ=VН=3,1м/с, маса нижньої і верхньої баби дорівнює Z 1,5 × 106 Mв = Мн = = = 1,6 × 105 кг(160т ). 2 2 V 3,1 Сумарна площа бокових плунжерів визначається із (1) як gMв 9,81× 1,6 × 105 2Fб = = = 0,174м2. 7 РГ 0,9 ×10 5 20851 З (2) виходить, що площа центрального плунжера F = 2F = 0,174м2. п б Діаметр кожного бокового плунжера 2Fб 2 × 0,174 = = 0,333м. p 3,14 Діаметр центрального плунжера dб = 4Fп 4 × 0,174 = = 0,471м. p 3,14 Для забезпечення руху нижньої баби з прискоренням g=8,83м/с2 необхідно, згідно (7), наступне зусилля dб = Fпр = Р'в 0,5Рв 14,15 × 105 = = = 0,051 2, м Pp - 0, 5Pз Р р - 0, 5Рз 30 × 106 - 0,5 × 5 × 106 діаметра поршня 4Fпр 4 × 0,051 dпр = = = 0,255м. p 3,14 Діаметр штока враховуючи те, що 1 FК = Fпр, 2 визначається за залежністю Комп’ютерна в ерстка М. Ломалов а 2Fпр 2 × 0,051 = = 0,180м. p 3,14 Тиск рідини у гідробаці при прямому холостому русі визначаємо за залежністю (8) 1,6 × 105 (9,81- 8,83) РГВ = = 0,89 × 106 Па(0,89МПа ). 0,174 Тиск рідини у гідробаці при зворотньому холостому русі визначаємо за залежністю (12) 1,6 × 105 (9,81+ 4,4) РГН = = 13,5 × 1106 Па(13,1МПа). 0,174 Час прямого холостого руху dш = 2Н 2 ×1 = = 0,48с. jв 8,83 Час зворотнього холостого руху æ F ö æ 0,174 ö РВ = g вç Мн + Мв п ÷ = 8,83ç1,6 × 105 + 16 × 105 ç , ÷ = 28,3 × 105 Н. ç 2Fб ÷ 0,174 ÷ è ø è ø Враховуючи, що прискорення руху баб при зворотньому русі у 2 рази менше за прискорення прямого холостого руху приймаємо, що кільцева площа поршня приводного гідравлічного циліндра у два рази менша повної площі. Тоді з урахуванням (3) визначаємо площу поршня приводного гідравлічного циліндра 6 tпз = 2Н 2 = = 0,67с. jн 4,4 Час подвійного руху T = tПК + t ЗХ = 0,48 + 0,67 = 115с. , Кількість ударів у хвилину 60 60 n= = = 52. T 1,15 У порівнянні з прототипом, молот, виконаний з використанням запропонованого технічного рішення, буде мати підвищену надійність вузлів гідрозв'язку і верхньої баби. Економічний ефект досягається за рахунок підвищення довговічності базових деталей безшаботного вертикального молота. tзх = Підписне Тира ж 26 прим. Міністерств о осв іти і нау ки України Держав ний департаме нт інте лекту альної в ласності, ву л. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститу т промислов ої в ласності”, ву л. Глазу нов а, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюNo-anvil vertical hammer
Автори англійськоюRei Roman Ivanovych, Hutko Yurii Ivanovych
Назва патенту російськоюБесшаботный вертикальный молот
Автори російськоюРей Роман Иванович, Гутько Юрий Иванович
МПК / Мітки
МПК: B21J 7/00
Мітки: вертикальний, молот, безшаботний
Код посилання
<a href="https://ua.patents.su/3-20851-bezshabotnijj-vertikalnijj-molot.html" target="_blank" rel="follow" title="База патентів України">Безшаботний вертикальний молот</a>
Безшаботний вертикальний молот
Номер патенту: 19623
Опубліковано: 15.12.2006
Автори: Рей Роман Іванович, Монятовський Станислав Степанович, Гутько Юрій Іванович
МПК: B21J 7/00
Мітки: молот, вертикальний, безшаботний
Формула / Реферат:
Безшаботний вертикальний молот, що містить верхню бабу з боковими штоками і плунжерами, нижню бабу з центральним штоком і плунжером, гідробак з розташованими у ньому боковими і центральним плунжерами та установлений співвісно центральному штоку привідний циліндр, який відрізняється тим, що шток привідного циліндра і центральний плунжер, який взаємодіє з центральним штоком, виконано як одне ціле у вигляді ступінчастого вала таким чином, що...
Безшаботний молот
Номер патенту: 40070
Опубліковано: 16.07.2001
Автори: Кравченко Руслан Анатолійович, Роганов Лев Леонідович
МПК: B21J 7/00
Мітки: молот, безшаботний
Формула / Реферат:
1. Безшаботний молот, що містить станину, верхню та нижню баби, привод баб, який відрізняється тим, що молот додатково має площадку, розміщену в площині співудару баб з можливістю забезпечення її пружньої податливості, а також регулювання положення відносно верхньої та нижньої баб.2. Безшаботний молот по п. 1, який відрізняється тим, що площадку виконано у вигляді плаского листа, короба з фланцем або стакана з фланцем, що має...
Пароповітряний ковальський молот
Номер патенту: 19872
Опубліковано: 15.01.2007
Автори: Корчак Олена Сергіївна, Шинкаренко Олег Михайлович
МПК: B21J 7/00
Мітки: пароповітряний, молот, ковальський
Формула / Реферат:
Пароповітряний ковальський молот, що містить робочий циліндр з буфером, падаючі частини, напрямний стояк, шабот, який має віброізоляцію та встановлено на фундаменті, систему керування, який відрізняється тим, що систему керування виконано електрогідравлічною, до складу якої входять електромеханічні перетворювачі, важелі зворотного зв'язку з соплами, гідророзподільники, маслостанція, пульт керування, на якому розташовано рукоятку керування,...
Високошвидкісний пневмогідравлічний молот
Номер патенту: 13806
Опубліковано: 17.04.2006
Автори: Роганов Лев Леонідович, Савінков Олександр Кузьмич, Роганов Максим Львович, Корчак Олена Сергіївна
МПК: B21J 7/00
Мітки: молот, пневмогідравлічний, високошвидкісний
Формула / Реферат:
Високошвидкісний пневмогідравлічний молот, що містить станину, циліндр низького тиску, циліндр високого тиску, плунжер, який зв'язано з бойком, що несе інструмент, рухому гільзу, що обхоплює плунжер, який відрізняється тим, що його оснащено жорстко з'єднаним із станиною гідропружним циліндром-акумулятором, плунжер якого виконано ступінчастим, так, що ущільнення на торці корпуса по діаметру більше, ніж діаметр плунжера на виході з...
Високошвидкісний пневмогідравлічний молот
Номер патенту: 16834
Опубліковано: 15.08.2006
Автори: Корчак Олена Сергіївна, Роганов Максим Львович, Роганов Лев Леонідович
МПК: B21J 7/00
Мітки: високошвидкісний, пневмогідравлічний, молот
Формула / Реферат:
Високошвидкісний пневмогідравлічний молот, що містить станину, циліндр-акумулятор, плунжер якого виконано ступінчастим, при цьому ущільнення на торці корпусу по діаметру більше, ніж діаметр плунжера на виході з циліндра-акумулятора, рухому гільзу, що охоплює плунжер, рухається відносно останнього та входить одним кінцем у гідропружний циліндр-акумулятор, а іншим - у циліндр низького тиску, систему керування, бойок, інструмент, який...
Попередній патент: Спосіб оцінки хронічного напруження організму щурів за показниками лейкоцитарної формули крові
Наступний патент: Протирадіаційний жилет
Випадковий патент: Високовольтний імпульсний конденсатор