Пристрій для високошвидкісного формування пакувань із заданими структурними параметрами
Номер патенту: 41182
Опубліковано: 12.05.2009
Автори: Домбровська Анастасія Геннадіївна, Прохорова Ірина Анатоліївна
Формула / Реферат
Пристрій для високошвидкісного формування пакувань із заданими структурними параметрами, який містить нитководій, виконаний у вигляді кривошипа з вічком і прикріплений до засобу для його переміщення по круговій траєкторії, що виконаний у вигляді шківа з індивідуальним приводом від індивідуального електродвигуна постійного струму і встановлений з можливістю обертання навколо ниткопровідної лійки, що жорстко закріплена на кронштейні, встановленому з можливістю регулювання поступальних переміщень нитководія індивідуальними приводами від індивідуальних електродвигунів постійного струму уздовж і перпендикулярно осі зубчатої рейки, яка встановлена з можливістю вертикального переміщення у встановленій на відстані від нитководія монолітній станині, на якій встановлений з можливістю регульованого поступального переміщення індивідуальним приводом від індивідуального електродвигуна постійного струму бобіноутримувач з пінолями, які встановлені в ньому з можливістю обертання індивідуальним приводом від індивідуального електродвигуна постійного струму, який відрізняється тим, що нитководій та пінолі бобіноутримувача встановлені з можливістю регулювання їх обертових переміщень індивідуальними приводами від індивідуальних електродвигунів постійного струму, які підключені в єдину систему одночасного керування регульованими обертовими та поступальними переміщеннями нитководія та пінолів.
Текст
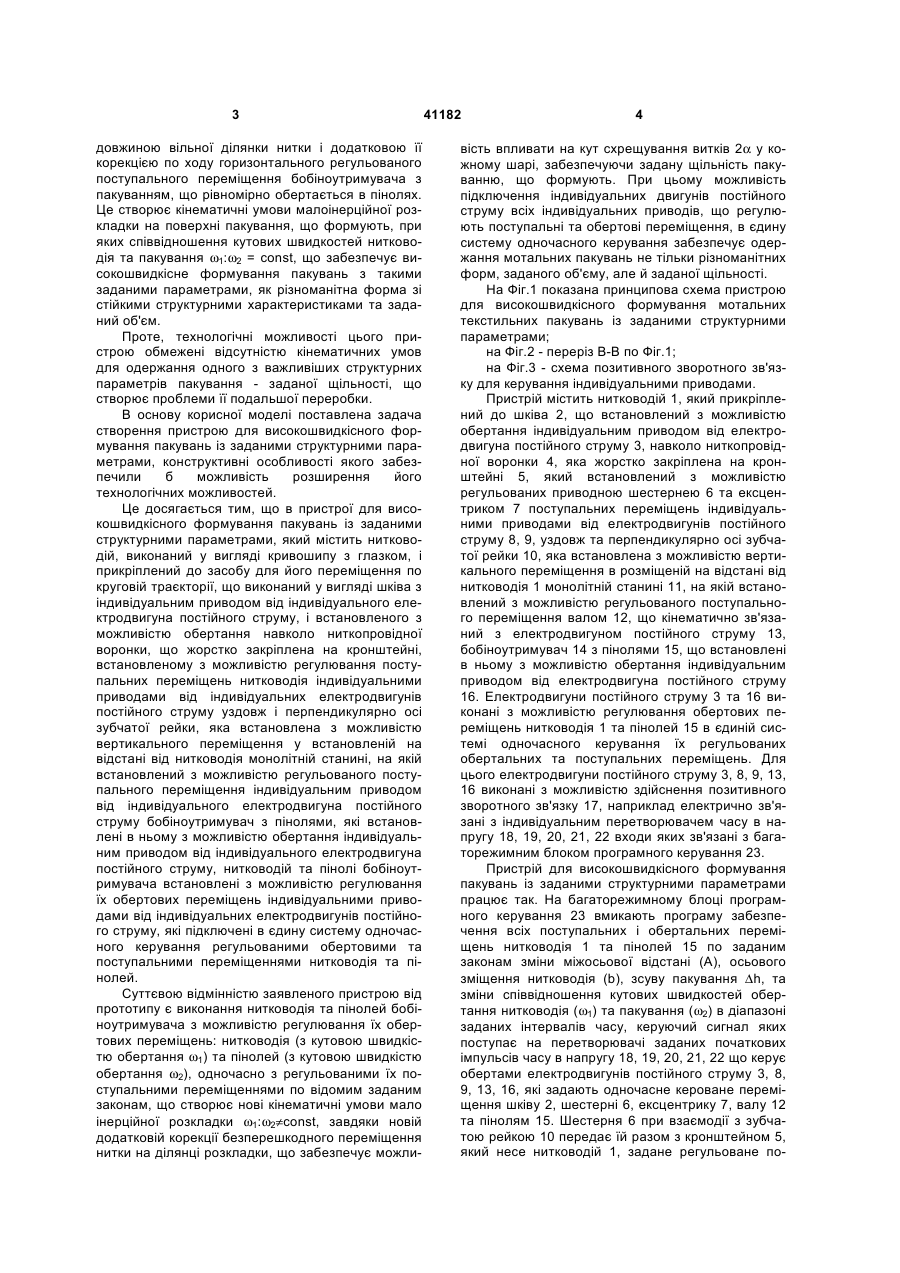
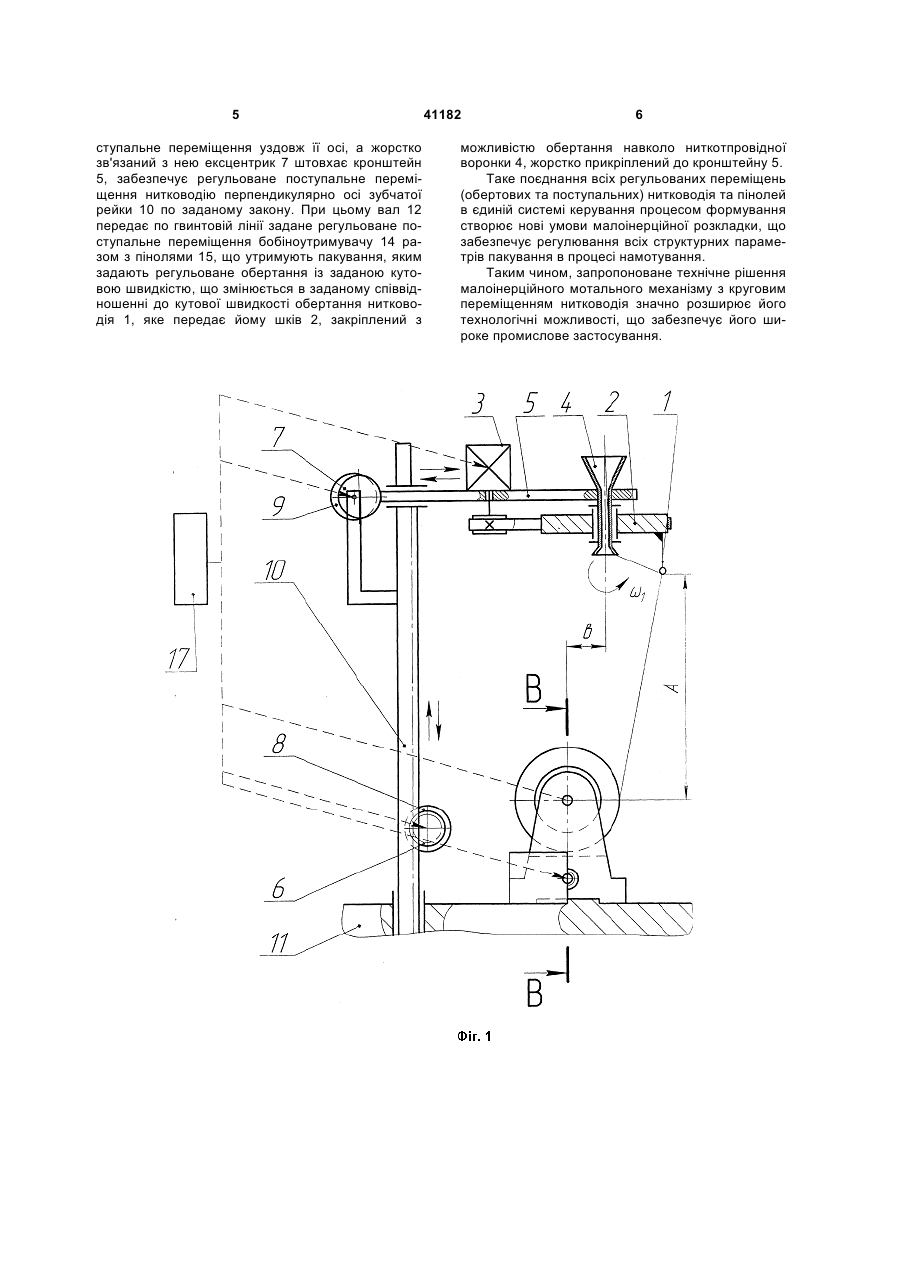
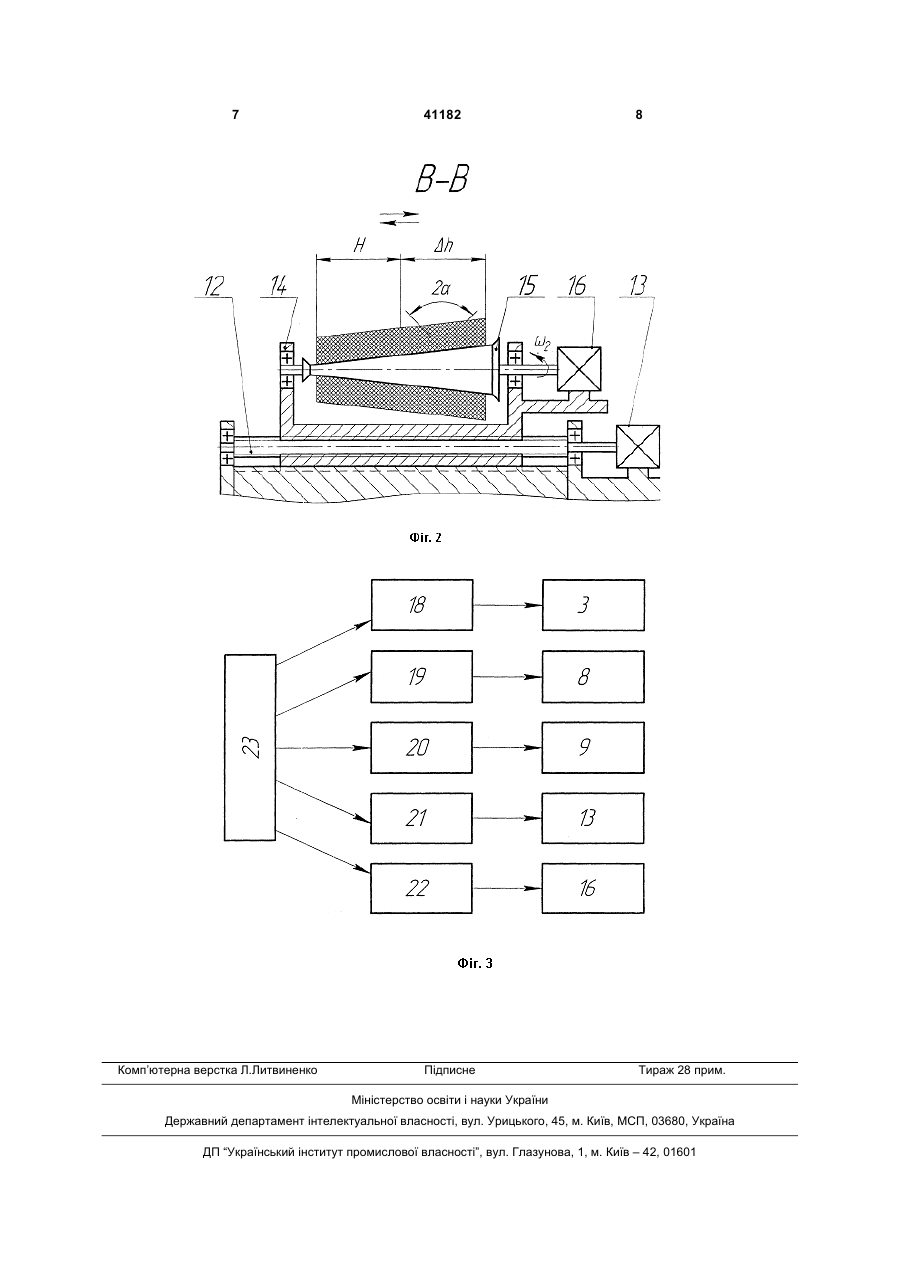
Пристрій для високошвидкісного формування пакувань із заданими структурними параметрами, який містить нитководій, виконаний у вигляді кривошипа з вічком і прикріплений до засобу для його переміщення по круговій траєкторії, що виконаний у вигляді шківа з індивідуальним приводом від індивідуального електродвигуна постійного струму і встановлений з можливістю обертання навколо ниткопровідної лійки, що жорстко закріплена на кронштейні, встановленому з можливістю регулювання поступальних переміщень нитководія індивідуальними приводами від індивідуальних елект U 1 3 довжиною вільної ділянки нитки і додатковою її корекцією по ходу горизонтального регульованого поступального переміщення бобіноутримувача з пакуванням, що рівномірно обертається в пінолях. Це створює кінематичні умови малоінерційної розкладки на поверхні пакування, що формують, при яких співвідношення кутових швидкостей нитководія та пакування ω1:ω2 = const, що забезпечує високошвидкісне формування пакувань з такими заданими параметрами, як різноманітна форма зі стійкими структурними характеристиками та заданий об'єм. Проте, технологічні можливості цього пристрою обмежені відсутністю кінематичних умов для одержання одного з важливіших структурних параметрів пакування - заданої щільності, що створює проблеми її подальшої переробки. В основу корисної моделі поставлена задача створення пристрою для високошвидкісного формування пакувань із заданими структурними параметрами, конструктивні особливості якого забезпечили б можливість розширення його технологічних можливостей. Це досягається тим, що в пристрої для високошвидкісного формування пакувань із заданими структурними параметрами, який містить нитководій, виконаний у вигляді кривошипу з глазком, і прикріплений до засобу для його переміщення по круговій траєкторії, що виконаний у вигляді шківа з індивідуальним приводом від індивідуального електродвигуна постійного струму, і встановленого з можливістю обертання навколо ниткопровідної воронки, що жорстко закріплена на кронштейні, встановленому з можливістю регулювання поступальних переміщень нитководія індивідуальними приводами від індивідуальних електродвигунів постійного струму уздовж і перпендикулярно осі зубчатої рейки, яка встановлена з можливістю вертикального переміщення у встановленій на відстані від нитководія монолітній станині, на якій встановлений з можливістю регульованого поступального переміщення індивідуальним приводом від індивідуального електродвигуна постійного струму бобіноутримувач з пінолями, які встановлені в ньому з можливістю обертання індивідуальним приводом від індивідуального електродвигуна постійного струму, нитководій та пінолі бобіноутримувача встановлені з можливістю регулювання їх обертових переміщень індивідуальними приводами від індивідуальних електродвигунів постійного струму, які підключені в єдину систему одночасного керування регульованими обертовими та поступальними переміщеннями нитководія та пінолей. Суттєвою відмінністю заявленого пристрою від прототипу є виконання нитководія та пінолей бобіноутримувача з можливістю регулювання їх обертових переміщень: нитководія (з кутовою швидкістю обертання ω1) та пінолей (з кутовою швидкістю обертання ω2), одночасно з регульованими їх поступальними переміщеннями по відомим заданим законам, що створює нові кінематичні умови мало інерційної розкладки ω1:ω2≠const, завдяки новій додатковій корекції безперешкодного переміщення нитки на ділянці розкладки, що забезпечує можли 41182 4 вість впливати на кут схрещування витків 2α у кожному шарі, забезпечуючи задану щільність пакуванню, що формують. При цьому можливість підключення індивідуальних двигунів постійного струму всіх індивідуальних приводів, що регулюють поступальні та обертові переміщення, в єдину систему одночасного керування забезпечує одержання мотальних пакувань не тільки різноманітних форм, заданого об'єму, але й заданої щільності. На Фіг.1 показана принципова схема пристрою для високошвидкісного формування мотальних текстильних пакувань із заданими структурними параметрами; на Фіг.2 - переріз В-В по Фіг.1; на Фіг.3 - схема позитивного зворотного зв'язку для керування індивідуальними приводами. Пристрій містить нитководій 1, який прикріплений до шківа 2, що встановлений з можливістю обертання індивідуальним приводом від електродвигуна постійного струму 3, навколо ниткопровідної воронки 4, яка жорстко закріплена на кронштейні 5, який встановлений з можливістю регульованих приводною шестернею 6 та ексцентриком 7 поступальних переміщень індивідуальними приводами від електродвигунів постійного струму 8, 9, уздовж та перпендикулярно осі зубчатої рейки 10, яка встановлена з можливістю вертикального переміщення в розміщеній на відстані від нитководія 1 монолітній станині 11, на якій встановлений з можливістю регульованого поступального переміщення валом 12, що кінематично зв'язаний з електродвигуном постійного струму 13, бобіноутримувач 14 з пінолями 15, що встановлені в ньому з можливістю обертання індивідуальним приводом від електродвигуна постійного струму 16. Електродвигуни постійного струму 3 та 16 виконані з можливістю регулювання обертових переміщень нитководія 1 та пінолей 15 в єдиній системі одночасного керування їх регульованих обертальних та поступальних переміщень. Для цього електродвигуни постійного струму 3, 8, 9, 13, 16 виконані з можливістю здійснення позитивного зворотного зв'язку 17, наприклад електрично зв'язані з індивідуальним перетворювачем часу в напругу 18, 19, 20, 21, 22 входи яких зв'язані з багаторежимним блоком програмного керування 23. Пристрій для високошвидкісного формування пакувань із заданими структурними параметрами працює так. На багаторежимному блоці програмного керування 23 вмикають програму забезпечення всіх поступальних і обертальних переміщень нитководія 1 та пінолей 15 по заданим законам зміни міжосьової відстані (А), осьового зміщення нитководія (b), зсуву пакування ∆h, та зміни співвідношення кутових швидкостей обертання нитководія (ω1) та пакування (ω2) в діапазоні заданих інтервалів часу, керуючий сигнал яких поступає на перетворювачі заданих початкових імпульсів часу в напругу 18, 19, 20, 21, 22 що керує обертами електродвигунів постійного струму 3, 8, 9, 13, 16, які задають одночасне кероване переміщення шківу 2, шестерні 6, ексцентрику 7, валу 12 та пінолям 15. Шестерня 6 при взаємодії з зубчатою рейкою 10 передає їй разом з кронштейном 5, який несе нитководій 1, задане регульоване по 5 ступальне переміщення уздовж її осі, а жорстко зв'язаний з нею ексцентрик 7 штовхає кронштейн 5, забезпечує регульоване поступальне переміщення нитководію перпендикулярно осі зубчатої рейки 10 по заданому закону. При цьому вал 12 передає по гвинтовій лінії задане регульоване поступальне переміщення бобіноутримувачу 14 разом з пінолями 15, що утримують пакування, яким задають регульоване обертання із заданою кутовою швидкістю, що змінюється в заданому співвідношенні до кутової швидкості обертання нитководія 1, яке передає йому шків 2, закріплений з 41182 6 можливістю обертання навколо ниткотпровідної воронки 4, жорстко прикріплений до кронштейну 5. Таке поєднання всіх регульованих переміщень (обертових та поступальних) нитководія та пінолей в єдиній системі керування процесом формування створює нові умови малоінерційної розкладки, що забезпечує регулювання всіх структурних параметрів пакування в процесі намотування. Таким чином, запропоноване технічне рішення малоінерційного мотального механізму з круговим переміщенням нитководія значно розширює його технологічні можливості, що забезпечує його широке промислове застосування. 7 Комп’ютерна верстка Л.Литвиненко 41182 8 Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for high-speed molding of packages with preset structural parameters
Автори англійськоюProkhorova Iryna Anatoliivna, Dombrovska Anastasia Hennadiivna
Назва патенту російськоюУстройство для высокоскоростного формования упаковок с заданными структурными параметрами
Автори російськоюПрохорова Ирина Анатольевна, Домбровская Анастасия Геннадиевна
МПК / Мітки
МПК: B65H 54/28, B65H 59/00
Мітки: параметрами, структурними, формування, пристрій, високошвидкісного, пакувань, заданими
Код посилання
<a href="https://ua.patents.su/4-41182-pristrijj-dlya-visokoshvidkisnogo-formuvannya-pakuvan-iz-zadanimi-strukturnimi-parametrami.html" target="_blank" rel="follow" title="База патентів України">Пристрій для високошвидкісного формування пакувань із заданими структурними параметрами</a>
Спосіб високошвидкісного формування текстильних пакувань із заданими параметрами
Номер патенту: 32178
Опубліковано: 12.05.2008
Автори: Прохорова Ірина Анатоліївна, Домбровська Анастасія Геннадіївна
МПК: B65H 54/28
Мітки: заданими, формування, параметрами, пакувань, спосіб, текстильних, високошвидкісного
Формула / Реферат:
Спосіб високошвидкісного формування текстильних пакувань з заданими параметрами, що включає подачу нитки на ниткорозкладач, малоінерційне розкладання її нитководієм, що обертають і переміщують при безперешкодному русі нитки на відрізку розкладки від вічка нитководія до поверхні пакування уздовж і перпендикулярно осі обертання нитководія в площині діаметрального перерізу пакування, що паралельна зубчастій рейці, по заданих законах при...
Спосіб високошвидкісного намотування нитки на пакування
Номер патенту: 18501
Опубліковано: 15.11.2006
Автори: Жук Оксана Сергіївна, Прохорова Ірина Анатоліївна
МПК: B65H 54/28
Мітки: спосіб, намотування, пакування, високошвидкісного, нитки
Формула / Реферат:
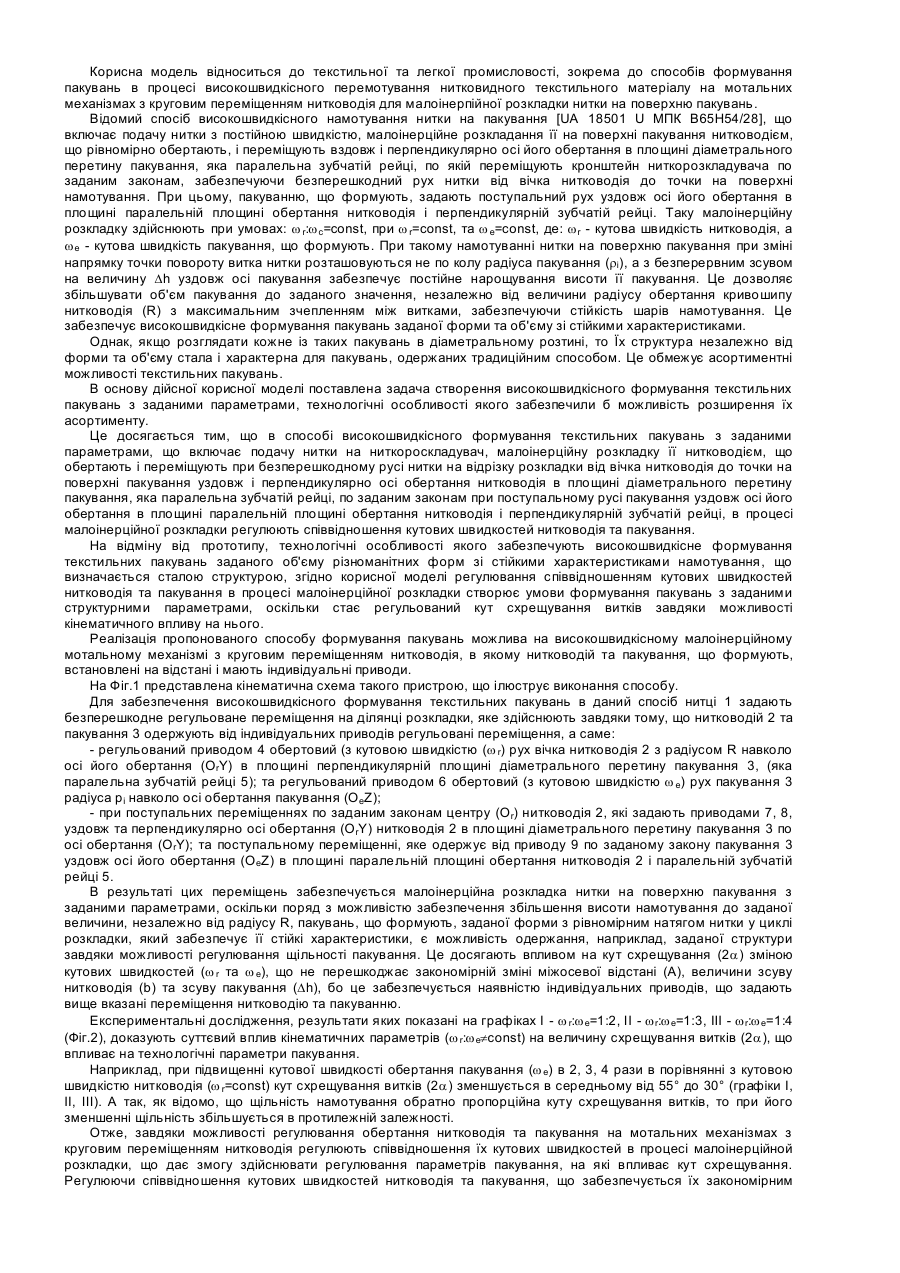
Спосіб високошвидкісного намотування нитки на пакування, що включає подачу нитки з постійною швидкістю, малоінерційне розкладання на пакування нитководієм, який рівномірно обертають і переміщують уздовж і перпендикулярно осі його обертання при безперешкодному русі нитки на відрізку розкладки від вічка нитководія до поверхні намотування за заданим законом, який відрізняється тим, що намотування нитки на пакування проводять диференційним...
Спосіб високошвидкісного перемотування нитки
Номер патенту: 51555
Опубліковано: 15.11.2002
Автори: Якубицька Ірина Анатоліївна, Домбровський Андрій Генадійович
МПК: B65H 54/28
Мітки: нитки, спосіб, перемотування, високошвидкісного
Формула / Реферат:
Спосіб високошвидкісного перемотування нитки, який включає подачу нитки з постійною швидкістю, малоінерційну розкладку на пакування нитководієм, що рівномірно обертають і переміщують уздовж осі його обертання при безперешкодному русі нитки на відрізку розкладки від вічка нитководія до поверхні пакування, який відрізняється тим, що на відрізку розкладки нитці задають рівномірний натяг переміщенням нитководія зі зміщенням його перпендикулярно...
Магнітний замок для пакувань
Номер патенту: 37919
Опубліковано: 10.12.2008
Автори: Бойчук Наталя Василівна, Гавенко Світлана Федорівна
МПК: B65B 29/00
Мітки: замок, магнітний, пакувань
Формула / Реферат:
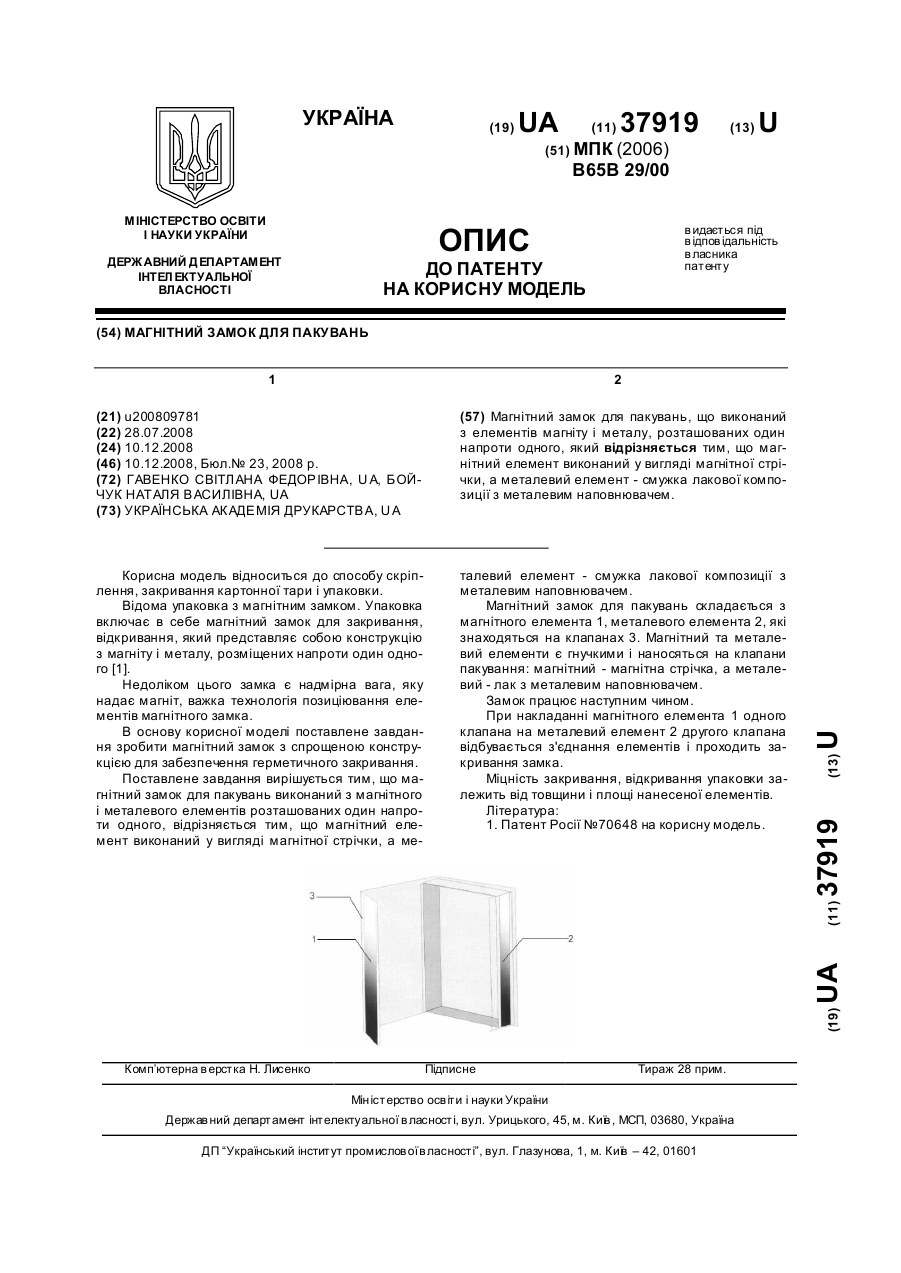
Магнітний замок для пакувань, що виконаний з елементів магніту і металу, розташованих один напроти одного, який відрізняється тим, що магнітний елемент виконаний у вигляді магнітної стрічки, а металевий елемент - смужка лакової композиції з металевим наповнювачем.
Пристрій для розкладу нитки

Номер патенту: 33495
Опубліковано: 15.02.2001
Автори: Чугін Валерій Віталійович, Якубіцька Ірина Анатолієвна, Домбровський Андрій Генадійович
МПК: B65H 54/28
Мітки: розкладу, нитки, пристрій
Текст:
...з шківа з ниткопровідною воронкою, який рівномірно обертається, та прикріпленного до нього нитководія, засіб для переміщення нитк встановлено з можливістю переміщення перпендикулярно осі обертання шківа Важливою відміною від прототипа, згідно винахіду, є те, що засіб для переміщення нитководія одержує можливість переміщення перпендикулярно осі обертання шківа, що забезпечує зміщену спіральну траєкторію руху нитководія, при якому...
Попередній патент: Молот безшаботний гідравлічний вертикальний
Наступний патент: Тривісний візок залізничного транспортного засобу
Випадковий патент: Спосіб прискореного розмноження суниці великоплідної (fragaria grandiflora) у теплиці