Спосіб контролю руху сосуду шахтної підйомної установки
Номер патенту: 5146
Опубліковано: 28.12.1994
Автори: Мусієнко Володимир Дмитрович, Чумакова Людмила Валентинівна, Корольов Леонід Іванович, Плахотний Петро Іванович, Копилов Володимир Михайлович, Чаєв Георгій Харитонович, Євглевський Станіслав Іванович, Гавруцький Олександр Юхимович

Формула / Реферат
Способ контроля движения сосуда шахтной подъемной установки, заключающийся в непрерывном измерении величины отклонения направляющих в шахте на пути движения сосуда и сравнении с заданной допустимой величиной, отличающийся тем, что, с целью повышения точности контроля, задают число допустимых отклонений, непрерывно измеряют величину местоположения сосуда, задают установочную величину, сравнивают с измеренной величиной отклонения направляющих в шахте, в случае превышения измеренной величины местоположения сосуда над заданной установочной величиной определяют с учетом местоположения сосуда, текущую величину отклонений сосуда, сравнивают с заданным числом допустимых отклонений и при превышении текущей величины отклонения сосуда от заданной формируют сигнал на отключение привода шахтной подъемной установки.
Текст
Изобретение относится к подъемнотранспортному оборудованию, а именно к использованию устройств, обеспечивающих надежность и безопасность эксплуатации системы сосуд-армировка и предназначено для использования в горнорудной пром-сти. Цель - повышение точности контроля за счет непрерывного учета зазоров между проводниками и сосудом. При контроле движения сосуда непрерывно измеряют величину отклонения направляющих (ОН) в шахте на пути движения сосуда и сравнивают с заданной допустимой величиной и установочной величиной. Дополнительно задают число допустимых ОН и непрерывно измеряют величину местоположений сосуда. Если текущая величина ОН больше допустимой, то формируют сигнал на отключение привода. Если текущая величина ОН больше установочной, то величину ОН далее сравнивают с заданной величиной числа допустимых ОН с учетом местоположения сосуда и определяют текущую величину отклонений сосуда. В случае превышения последней над заданной величиной числа допустимых ОН формируют сигнал на отключение привода подъемной установки 1. ил. Изобретение относится к подьемнотранспортным устройствам, а именно к использованию устройств, обеспечивающих надежность и безопасность эксплуатации системы сосуд-армировка и может быть использовано в горнорудной промышленности. Цель изобретения - повышение точности контроля за счет непрерывного учета зазоров между проводником и сосудом. На чертеже изображен пример осуществления способа контроля движения сосуда шахтной подъемной установки. В направляющих башмаках 1 подъемного сосуда 2 установлены датчики 3 и 4 для измерения отклонения направляющих, те. боковых и лобовых зазоров соответственно. Датчики 3 и 4 соединены с первым входом элементов 5 и 6 сравненич. На в горой вход указанных блоков подается электрический сигнал от задзтчика 7 допустимой величины зазоров и задатчика 8 установочной величины зазоров соответственно С выхода элемента 5 сигналы поступают на вход логического элемента ИЛИ 9, выход которого связан с исполнительным органом 10 (например тормозом подьемной машины). Выходы счетчика 11 соединены с входами регистрирующего устройства 12 (или Клока памяти) и первыми входами блока 13 срав і кэ 1684212 нения. На второй вход указанного блока подается сигнал от задатчика 14 числа допустимых отклонений. Выходной сигнал блока 13 поступает на элемент ИЛИ 9. Выходы датчика 15 местоположения сосуда соеди- 5 нены с управляющими входами демультиплексора 16, информационные входы которого соединены с выходами элемента 6,' а выходы - с входами счетчика 11. Датчики 3 и 4 взаимодействуют с проводниками в 10 стволе шахты. Способ контроля движения сосуда шахтной подъемной установки осуществляют следующим образом. Устанавливают уровень сигнала, посту- 15 пающего от задатчика 7 допустимой величины зазоров на второй вход элемента 5. При этом уровень указанного сигнала должен соответствовать зазору между направляющим башмаком 1 и проводником, равному 20 14 мм. Аналогично производят установку минимального уровня, для нашего г римера 2 мм. Далее устанавливают уровень электрического сигнала, поступающего от задатчика 8 установочной величины зазоров. На 25 основании статистической обработки маркшейдерских данных о профиле проводников этот уровень должен соответствовать величине зазора между направляющим башмаком 1 и проводником, равного 90% от 30 величины допустимого зазора, для нашего примера величине установочного зазора 12,6 мм. Показания счетчика 11 устанавливают на 0 (не показано). Устанавливают уровень сигнала, поступающего от задатчика 14 35 числа допустимых отклонений на блок 13. Учитывая, что подъем является ответственным участком в работе шахты, принимают количество отклонений зазоров от величины установочного зазора равным 10 Т.е. 40 при отклонениях величины зазора от установочного в большую сторону в одном и том же месте по глубине стола (десять раз) происходит срабатывание защитной системы. мента 5 сравнения сигналы только нулевого уровня. При превышении хотя бы одного из сигналов от датчиков 3 и 4 уровня сигналов задатчика 7 этот единичный сигнал с выхода элемента 5 сравнения поступает на элемент ИЛИ 9 и на исполнительный орган 10, например тормоз подъемной машины Производят остановку подъемного сосуда. Аналогично работает система и для минимально допустимого зазора. Кроме того, сигналы, поступающие от датчиков 3 и 4, поступают на первый вход элемента 6 сравнения, где происходит сравнение этих сигналов с соответствующими сигналами, поступающими на второй вход элемента 6 сравнения от зад^тчика 3 установочной величины зазоров, и определяют уровень отклонения сигналов датчиков 3 и 4 от сигналов зздатчика 8. Выходы элемента 6 сравнения подключают с помощью демультиплексора 16 с тактовым (счетным) входам счетчика 11, соответствующим определенному местоположению подъемного сосуда. Для этого датчиком 15 измеряют местоположения подъемного сосуда и соответствующий сигнал в цифровом коде с него подают на управляющие входы демультиплексора 16. В соответствии с информацией на управляющих выходах демультиплексор осуществляет коммутацию сигналов с выхода элемента 6 сравнения на входы счетчика 11 соответствующего местоположения подъемного сосуда. Таким образом, в счетчике 11 осуществляют подсчет количества отклонений эксплуатационных зазоров от установочного уровня для соответствующего местоположения подъемного сосуда. С выходов счетчика 11 сигналы подают на блок 13 сравнения и на входы регистрирующего устройства 12. С помощью блока 13 производят сравнение указанных сигналов от счетчика 11 с уровнем (кодом) сигналов задатчика 14 ч^сла допустимых отклонений. Если поступающие сигналы (их величина Работа системы осуществляется непос- 45 или код) меньше уровня (кода), определяемого сигналами зздатчика 14, то на выходе редственно в условиях эксплуатации подъблока 13 формируют сигналы нулевого уровемной установки на рабочей скорости ня и защитную систему не включают. Если движения подъемного сосуда. При движении хотя бы один из поступающих сигналов преподъемного сосуда 2 зазор между направляющими башмаками 1 и проводниками меня- 50 вышэет установленный уровень, то соответется соответственно пропорционально ствующий единичный сигнал с аыуодаблока этому меняются и электрические сигналы, 13 поступает на элемент ИЛИ 9 и с него - на поступающие от датчиков 3 и 4 на первый исполнительный орган 10. В результате этовход элемента 5 сравнения, где указанные го, как и в предыдущем случае, производят сигналы сравниваются с сигналом, поступа- 55 остановку подъемной машины ющим на второй вход элемента 5 от задатСигналы, которые поступают на регистчика 7 допустимых зазоров. Если сигналы от рирующее устройство (или блок памяти), датчиков 4 и 3 не превышают уровня сигназаписывают, запоминают, затем обрабатылов задатчика 7, то защита не срабатывает, вают для получения наглядной информации так как на элемент ИЛИ 9 поступают с элео состоянии геометрических параметров си 1684212 Формула изобретения стемы сосуд-армировка вдоль всей глубины Способ контроля движения сосуда шахшахтного ствола. Эту информацию испольтной подъемной установки, ззключ?ющийся зуют при составлении плзмов профилактив непрерывном измерении величины 01ческих осмотров и ремонтных работ армировки. 5 клонения направляющих в шахте на пути движения сосуда и сравнении с заданной допустимой величиной, о т л и ч а ю щ и й с я Cnoci'6 позволяет контролировать сотем, что, с целью повышения точности констояние проводников Зная состояние троля, задают число допустимых отклонепроводников возможно производить безопасный подієм и изменение скорости 10 ний. непрерызно измеряют величину подъема. Имей достоверные данные о соместоположения сосуда, задают установочстоянии проводников можно своевременно ную величину, срарчивают с измеренной вепроизводить ремонт последних Использоличиной отклонения направляющих з вание данного способа позволяет предупшахте, а случае пре&ышзнив изморенной редить аварии в шахтном w воле по причине 15 вепичины местоположения сосуда над завыхода подъемного сосуда из зацепления с данной установочной величиной орпеделлют проводниками мли заклинивания его в месс учетом мес on ол о*: єни я сосуда, текущую гак сужения проводников, производить свовеличину отклонений сосуда, сравнивают с евременньи* ремонт армировки, дает заданным числом допустимых о і клонений и возможность предотвращения аварий в 20 при превышении текущей величины отклошахтном стволе, позволяет достичь ритмичнения сосуда от заданной формируют сигной работы всего шахтного комплекса и понал на отключение привода шахтной высить его производительность. подъемной установки. 1684212 Редактор М. Кобылянская Составитель О. Капкаиец Техред М.Моргентал Корректор С. Шевкун Заказ 3479 Тираж Подписное ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., 4/5 Производственно-издательский комбинат "Патент", г. Ужгород, ул.Гагарина, 101
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for control of movement of shaft hoist vessel
Автори англійськоюHavrutskyi Oleksandr Yukhymovych, Musienko Volodymyr Dmytrovych, Chaiev Heorhii Kharytonovych, Yevhlevskyi Stanislav Ivanovych, Kopylov Volodymyr Mykhailovych, Chumakova Liudmyla Valentynivna, Koroliov Leonid Ivanovych, Plakhotnyi Petro Ivanovych
Назва патенту російськоюСпособ контроля движения сосуда шахтной подъемной установки
Автори російськоюГавруцкий Александр Ефимович, Мусиенко Владимир Дмитриевич, Чаев Георгий Харитонович, Евглевский Станислав Иванович, Копылов Владимир Михайлович, Чумакова Людмила Валентиновна, Королев Леонид Иванович, Плахотный Петр Иванович
МПК / Мітки
Мітки: спосіб, руху, шахтної, установки, контролю, підйомної, сосуду
Код посилання
<a href="https://ua.patents.su/4-5146-sposib-kontrolyu-rukhu-sosudu-shakhtno-pidjjomno-ustanovki.html" target="_blank" rel="follow" title="База патентів України">Спосіб контролю руху сосуду шахтної підйомної установки</a>
Спосіб контролю росту тріщин у зразках матеріалів
Номер патенту: 2914
Опубліковано: 26.12.1994
Автори: Лисак Микола Васильович, Скальський Валентин Романович, Андрейків Олександр Євгенович
МПК: G01N 29/14
Мітки: контролю, тріщин, матеріалів, спосіб, росту, зразках
Формула / Реферат:
Способ контроля роста трещин в образцах материалов, заключающийся в том, что на образце располагают группу преобразователей, регистрируют сигналы акустической эмиссии, по которым судят о контролируемом параметре, отличающийся тем, что выявляют зоны образца, в которых зарегистрированы наименьшие и наибольшие значения сигналов акустической эмиссии, устанавливают преобразователи акустической эмиссии в этих зонах на расстоянии один от другого,...
Пристрій для установки вимірювальної головки активного контролю
Номер патенту: 4012
Опубліковано: 27.12.1994
Автори: Томах Віктор Михайлович, Андрющенко Володимир Іванович, Баранов Станіслав Єгорович
МПК: B24B 49/00
Мітки: пристрій, активного, головки, вимірювальної, установки, контролю
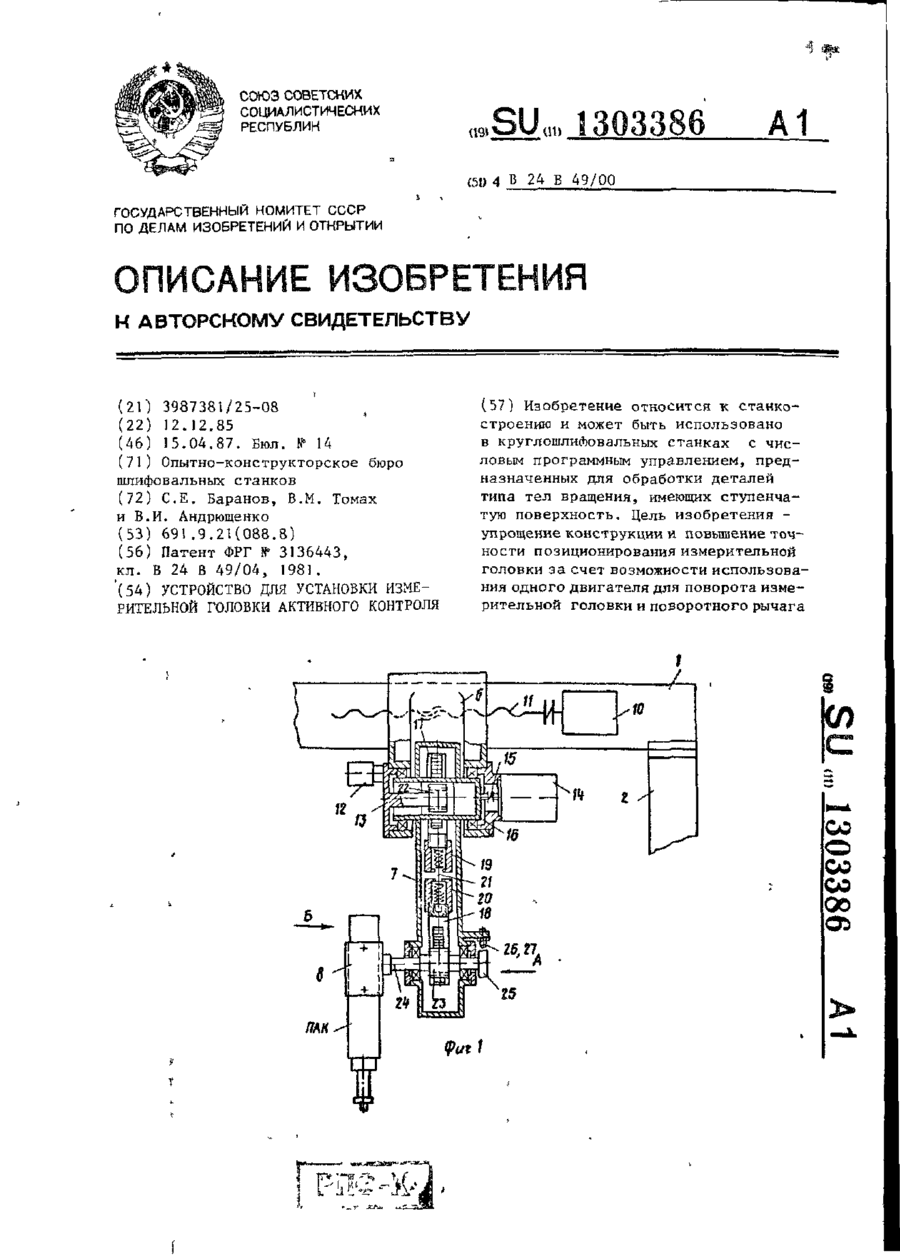
Формула / Реферат:
Устройство для установки измерительной головки активного контроля, содержащее портал, закрепленный на станине станка, каретку с поворотным рычагом, оснащенным измерительной головкой, привод перемещения каретки, опорную измерительную цапфу, закрепленную на каретке, привод поворота рычага вокруг оси, установленнойна каретке, двигатель которого жестко связан с кареткой, а приводной вал - с корпусом поворотного рычага, и механизм ввода...
Пристрій для контролю максимального відхилення ротора від осі турбомашини
Номер патенту: 345
Опубліковано: 30.04.1993
Автори: Морозов Микола Ібрагимович, Квашин Михайло Федорович, Метельов Леонід Дмитрович, Маркевич Анатолій Васильович, Цибулько Вадим Йосипович
МПК: F01D 21/00
Мітки: ротора, осі, пристрій, турбомашині, контролю, максимального, відхілення
Формула / Реферат:
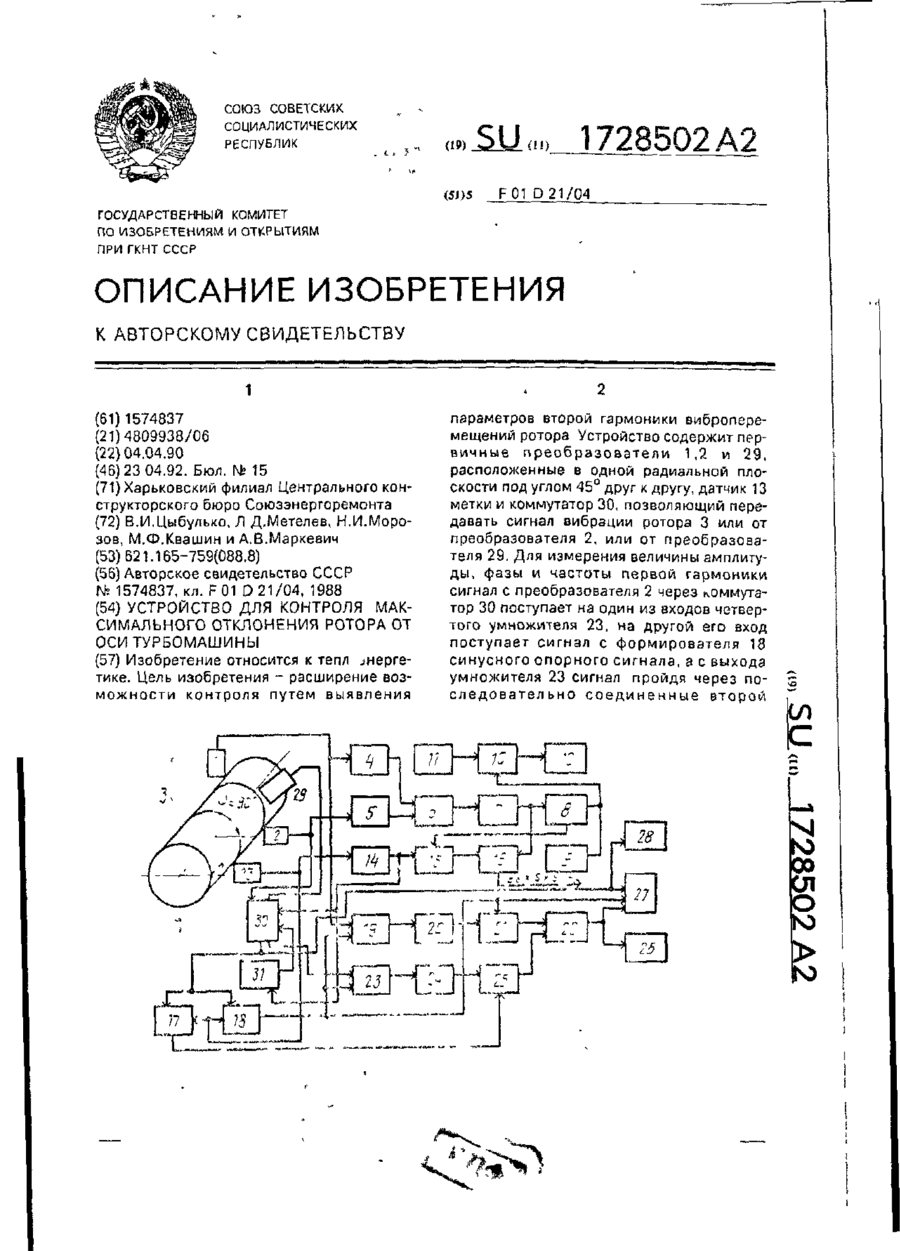
Формула изобретенияУстройство для контроля максимального отклонения ротора от оси турбомашины по авт. св. № 1574837, отличающееся тем, что, с целью расширения возможностей контроля путем выявления параметров второй гармоники вибросмещений ротора, оно снабжено третьим первичным преобразователем, вторым умножителем частоты и коммутатором, причем третий первичный преобразователь установлен вблизи ротора в плоскости установки первого и...
Пристрій для контролю максимального відхилення ротора від осі турбомашини
Номер патенту: 348
Опубліковано: 30.04.1993
Автори: Морозов Микола Ібрагимович, Метельов Леонід Дмитрович, Квашин Михайло Федорович, Цибулько Вадим Йосипович, Боярчук Володимир Кирилович, Шунайлов Генадій Олександрович
МПК: F01D 21/00
Мітки: ротора, турбомашині, відхілення, осі, контролю, максимального, пристрій
Формула / Реферат:
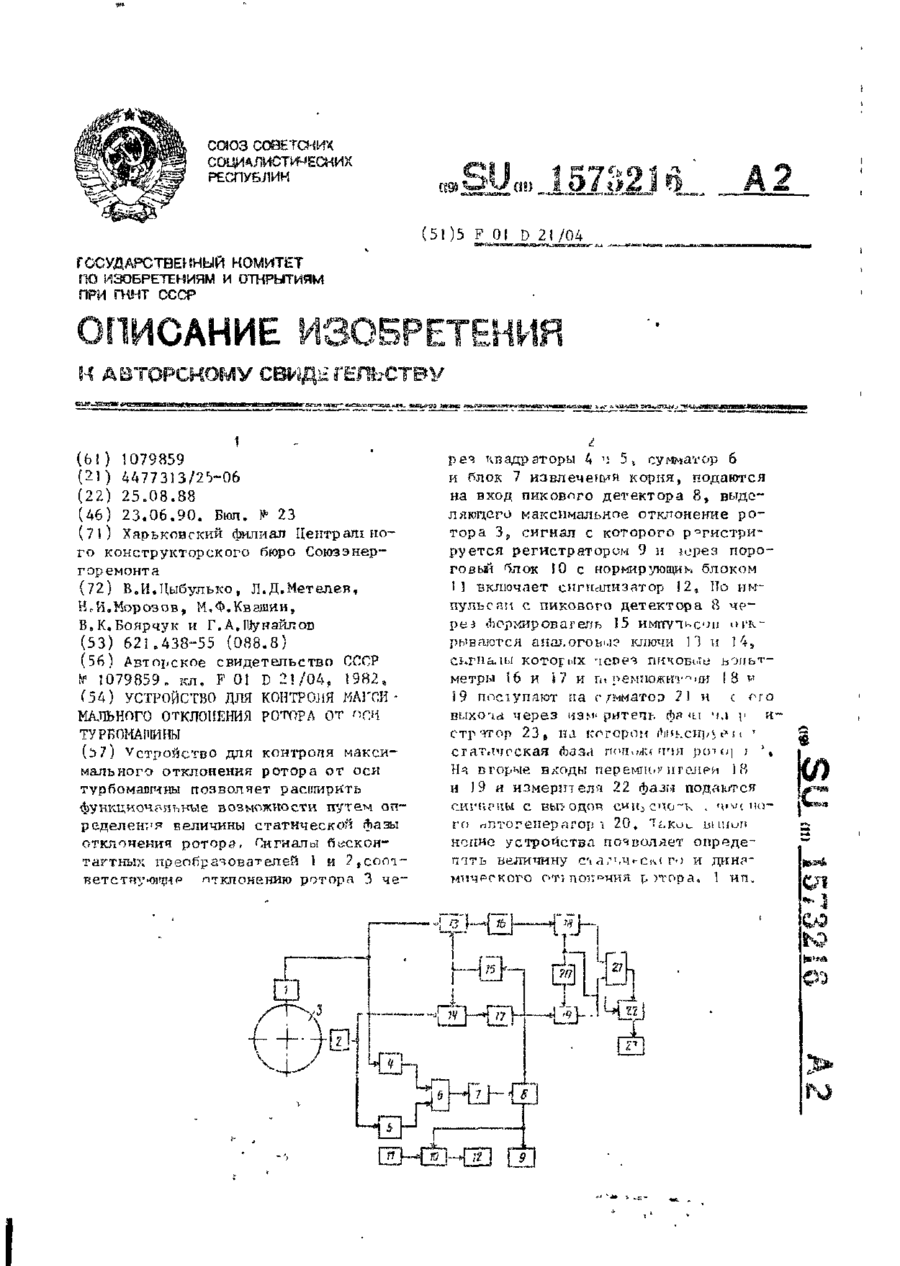
Устройство для контроля максимального отклонения ротора от оси турбомашины по авт. св. № 1079859, отличающееся тем, что, с целью расширения функциональных возможностей путем определения величины статической фазы отклонения ротора, оно дополнительно содержит первый и второй аналоговые ключи, формирователь импульсов, первый и второй пиковые вольтметры, первый и второй перемножители, опорный синусно-косинусный автогенератор, второй...
Пристрій для контролю максимального відхилення ротора від осі турбомашини
Номер патенту: 360
Опубліковано: 30.04.1993
Автори: Метельов Леонід Дмитрович, Цибулько Вадим Йосипович, Барков Олександр Степанович, Морозов Микола Ібрагимович
МПК: F01D 21/00
Мітки: осі, турбомашині, відхілення, пристрій, максимального, ротора, контролю
Формула / Реферат:
Формула изобретения Устройство для контроля максимального отклонения ротора от оси турбомашины, содержащее первый и второй первичные преобразователи, установленные вблизи ротора в одной плоскости по двум взаимно перпендикулярным осям и подключенные каждый своим выходом на вход соответственно первого и второго квадраторов, соединенных с входами первого сумматора, выход которого подключен через последовательно соединенные блоки...
Попередній патент: Установка для активації цементної суспензії
Наступний патент: Спосіб вирощування цукрових буряків
Випадковий патент: Спосіб обміну інформацією, переважно у рекламно-комерційних цілях