Мікропроцесорний вимірювач поляризаційного опору
Номер патенту: 52523
Опубліковано: 25.08.2010
Автори: Васильєв Георгій Степанович, Герасименко Юрій Степанович
Формула / Реферат
Мікропроцесорний вимірювач поляризаційного опору, що містить двоелектродний вимірювальний перетворювач, один електрод якого з'єднаний з виходом перетворювача напруга поляризації-струм поляризації, а другий - із зразковим резистором, неінвертувальним входом диференційного підсилювача і інвертувальним входом перетворювача напруга поляризації-струм поляризації, неінвертувальний вхід якого приєднаний до джерела поляризуючої напруги, перший та другий пристрої запам'ятовування, входи яких через відповідно перший та другий ключі з'єднані з виходом диференційного підсилювача, а виходи з'єднані з відповідними входами блока віднімання, третім ключем, що встановлений у ланцюгу перетворювача напруга поляризації-струм поляризації та джерела поляризуючої напруги, а також програмний пристрій, причому вихід блока віднімання через додатковий пристрій запам'ятовування з'єднаний з реєстратором, а програмний пристрій з'єднаний із входами керування всіх пристроїв запам'ятовування, ключів і блока віднімання, який відрізняється тим, що як програмний пристрій застосовано мікропроцесор, який через аналогово-цифровий перетворювач з'єднаний з виходом блока віднімання та з цифровим реєстратором.
Текст
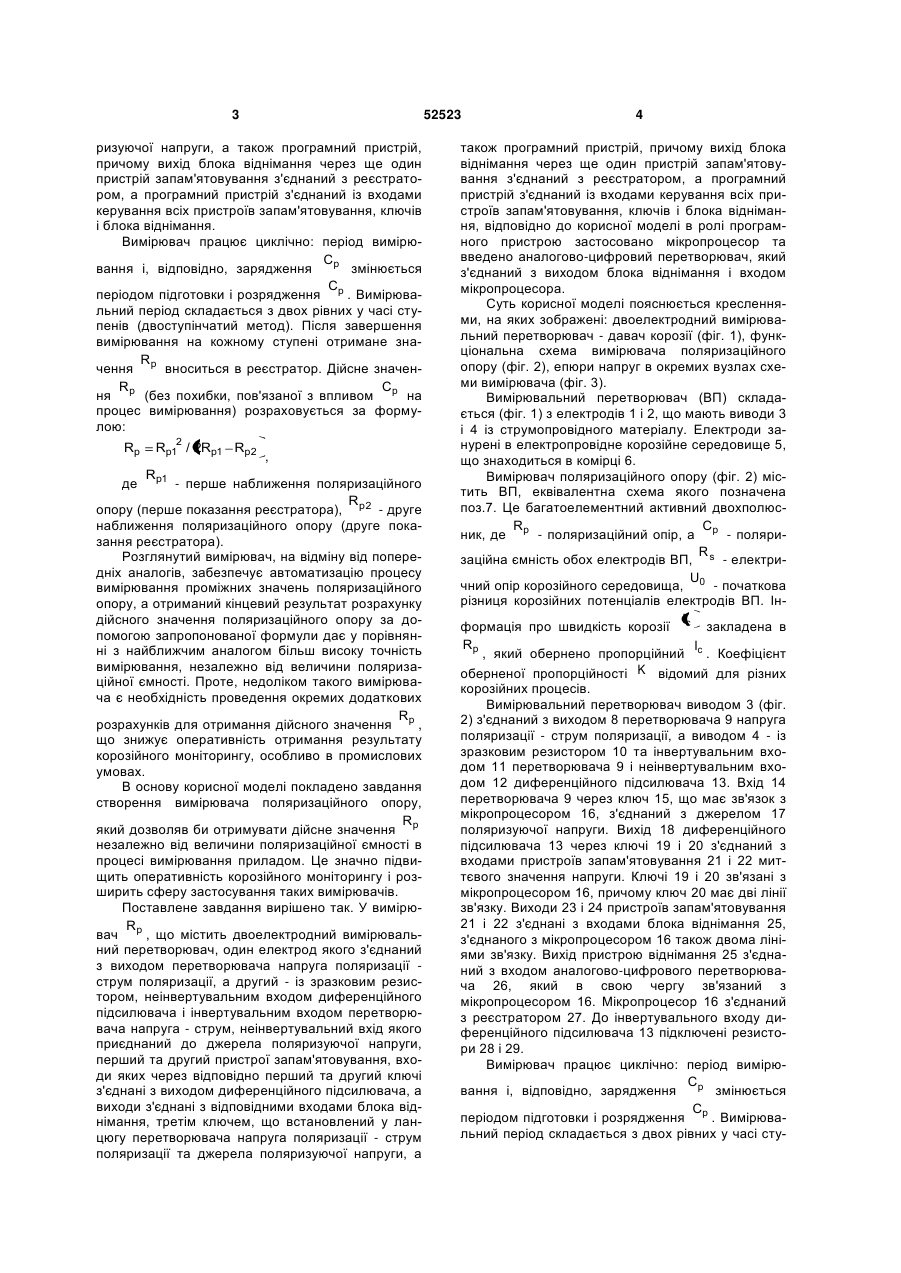
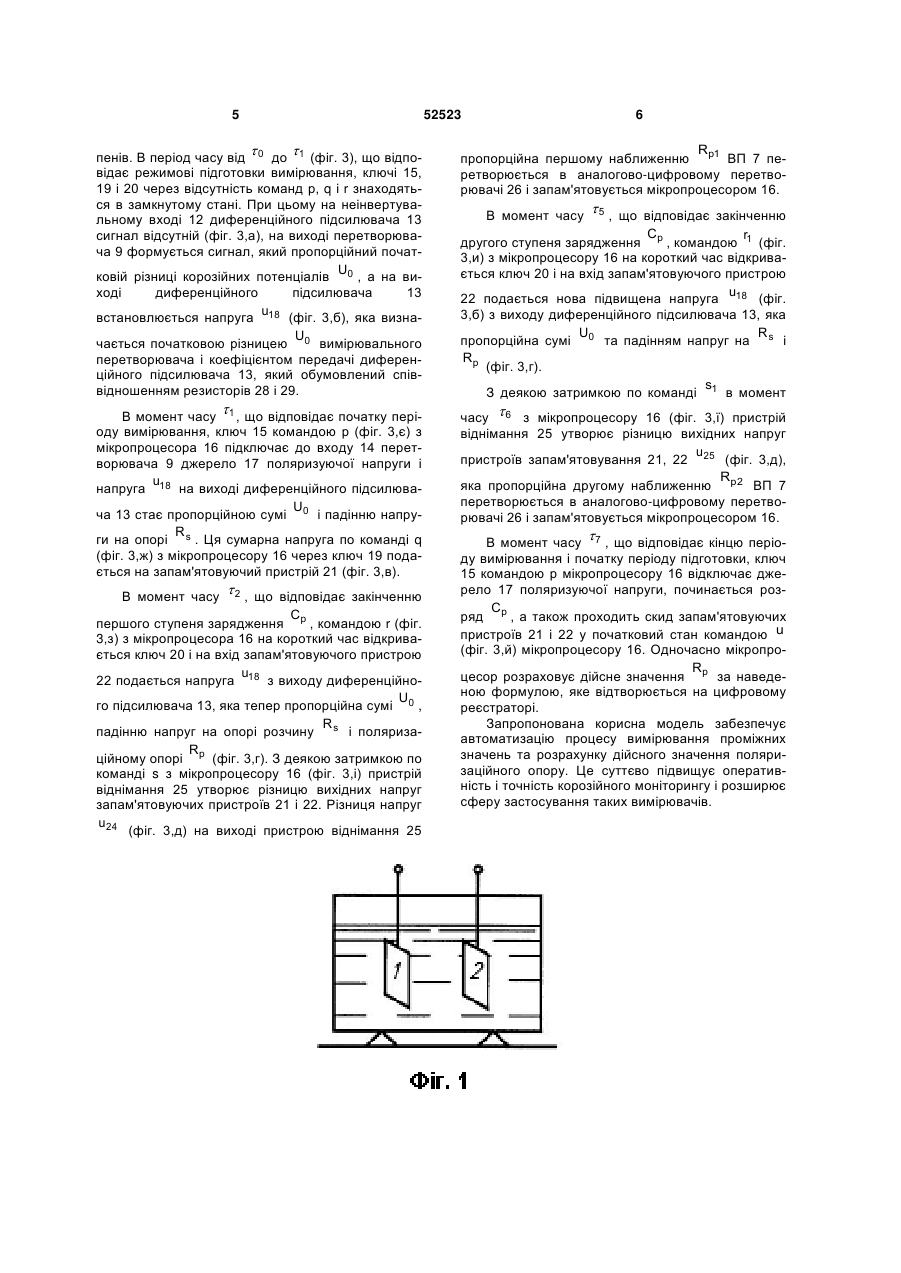
Мікропроцесорний вимірювач поляризаційного опору, що містить двоелектродний вимірювальний перетворювач, один електрод якого з'єднаний з виходом перетворювача напруга поляризаціїструм поляризації, а другий - із зразковим резистором, неінвертувальним входом диференційного підсилювача і інвертувальним входом перетворювача напруга поляризації-струм поляризації, неінвертувальний вхід якого приєднаний до джерела 3 52523 ризуючої напруги, а також програмний пристрій, причому вихід блока віднімання через ще один пристрій запам'ятовування з'єднаний з реєстратором, а програмний пристрій з'єднаний із входами керування всіх пристроїв запам'ятовування, ключів і блока віднімання. Вимірювач працює циклічно: період вимірюCp вання і, відповідно, зарядження змінюється Cp періодом підготовки і розрядження . Вимірювальний період складається з двох рівних у часі ступенів (двоступінчатий метод). Після завершення вимірювання на кожному ступені отримане знаR чення p вноситься в реєстратор. Дійсне значенR C ня p (без похибки, пов'язаної з впливом p на процес вимірювання) розраховується за формулою: Rp де Rp12 / 2Rp1 Rp2 Rp1 , - перше наближення поляризаційного R опору (перше показання реєстратора), p 2 - друге наближення поляризаційного опору (друге показання реєстратора). Розглянутий вимірювач, на відміну від попередніх аналогів, забезпечує автоматизацію процесу вимірювання проміжних значень поляризаційного опору, а отриманий кінцевий результат розрахунку дійсного значення поляризаційного опору за допомогою запропонованої формули дає у порівнянні з найближчим аналогом більш високу точність вимірювання, незалежно від величини поляризаційної ємності. Проте, недоліком такого вимірювача є необхідність проведення окремих додаткових R розрахунків для отримання дійсного значення p , що знижує оперативність отримання результату корозійного моніторингу, особливо в промислових умовах. В основу корисної моделі покладено завдання створення вимірювача поляризаційного опору, R який дозволяв би отримувати дійсне значення p незалежно від величини поляризаційної ємності в процесі вимірювання приладом. Це значно підвищить оперативність корозійного моніторингу і розширить сферу застосування таких вимірювачів. Поставлене завдання вирішено так. У вимірюR вач p , що містить двоелектродний вимірювальний перетворювач, один електрод якого з'єднаний з виходом перетворювача напруга поляризації струм поляризації, а другий - із зразковим резистором, неінвертувальним входом диференційного підсилювача і інвертувальним входом перетворювача напруга - струм, неінвертувальний вхід якого приєднаний до джерела поляризуючої напруги, перший та другий пристрої запам'ятовування, входи яких через відповідно перший та другий ключі з'єднані з виходом диференційного підсилювача, а виходи з'єднані з відповідними входами блока віднімання, третім ключем, що встановлений у ланцюгу перетворювача напруга поляризації - струм поляризації та джерела поляризуючої напруги, а 4 також програмний пристрій, причому вихід блока віднімання через ще один пристрій запам'ятовування з'єднаний з реєстратором, а програмний пристрій з'єднаний із входами керування всіх пристроїв запам'ятовування, ключів і блока віднімання, відповідно до корисної моделі в ролі програмного пристрою застосовано мікропроцесор та введено аналогово-цифровий перетворювач, який з'єднаний з виходом блока віднімання і входом мікропроцесора. Суть корисної моделі пояснюється кресленнями, на яких зображені: двоелектродний вимірювальний перетворювач - давач корозії (фіг. 1), функціональна схема вимірювача поляризаційного опору (фіг. 2), епюри напруг в окремих вузлах схеми вимірювача (фіг. 3). Вимірювальний перетворювач (ВП) складається (фіг. 1) з електродів 1 і 2, що мають виводи 3 і 4 із струмопровідного матеріалу. Електроди занурені в електропровідне корозійне середовище 5, що знаходиться в комірці 6. Вимірювач поляризаційного опору (фіг. 2) містить ВП, еквівалентна схема якого позначена поз.7. Це багатоелементний активний двохполюсR C ник, де p - поляризаційний опір, а p - поляриR заційна ємність обох електродів ВП, s - електриU чний опір корозійного середовища, 0 - початкова різниця корозійних потенціалів електродів ВП. ІнI формація про швидкість корозії c закладена в Rp I , який обернено пропорційний c . Коефіцієнт оберненої пропорційності K відомий для різних корозійних процесів. Вимірювальний перетворювач виводом 3 (фіг. 2) з'єднаний з виходом 8 перетворювача 9 напруга поляризації - струм поляризації, а виводом 4 - із зразковим резистором 10 та інвертувальним входом 11 перетворювача 9 і неінвертувальним входом 12 диференційного підсилювача 13. Вхід 14 перетворювача 9 через ключ 15, що має зв'язок з мікропроцесором 16, з'єднаний з джерелом 17 поляризуючої напруги. Вихід 18 диференційного підсилювача 13 через ключі 19 і 20 з'єднаний з входами пристроїв запам'ятовування 21 і 22 миттєвого значення напруги. Ключі 19 і 20 зв'язані з мікропроцесором 16, причому ключ 20 має дві лінії зв'язку. Виходи 23 і 24 пристроїв запам'ятовування 21 і 22 з'єднані з входами блока віднімання 25, з'єднаного з мікропроцесором 16 також двома лініями зв'язку. Вихід пристрою віднімання 25 з'єднаний з входом аналогово-цифрового перетворювача 26, який в свою чергу зв'язаний з мікропроцесором 16. Мікропроцесор 16 з'єднаний з реєстратором 27. До інвертувального входу диференційного підсилювача 13 підключені резистори 28 і 29. Вимірювач працює циклічно: період вимірюCp вання і, відповідно, зарядження змінюється Cp періодом підготовки і розрядження . Вимірювальний період складається з двох рівних у часі сту 5 52523 6 пенів. В період часу від 0 до 1 (фіг. 3), що відповідає режимові підготовки вимірювання, ключі 15, 19 і 20 через відсутність команд р, q і r знаходяться в замкнутому стані. При цьому на неінвертувальному вході 12 диференційного підсилювача 13 сигнал відсутній (фіг. 3,а), на виході перетворювача 9 формується сигнал, який пропорційний початU ковій різниці корозійних потенціалів 0 , а на виході диференційного підсилювача 13 u18 встановлюється напруга (фіг. 3,б), яка визнаU чається початковою різницею 0 вимірювального перетворювача і коефіцієнтом передачі диференційного підсилювача 13, який обумовлений співвідношенням резисторів 28 і 29. R пропорційна першому наближенню p1 ВП 7 перетворюється в аналогово-цифровому перетворювачі 26 і запам'ятовується мікропроцесором 16. В момент часу 1 , що відповідає початку періоду вимірювання, ключ 15 командою р (фіг. 3,є) з мікропроцесора 16 підключає до входу 14 перетворювача 9 джерело 17 поляризуючої напруги і u напруга 18 на виході диференційного підсилюваU ча 13 стає пропорційною сумі 0 і падінню напруR ги на опорі s . Ця сумарна напруга по команді q (фіг. 3,ж) з мікропроцесору 16 через ключ 19 подається на запам'ятовуючий пристрій 21 (фіг. 3,в). часу 6 з мікропроцесору 16 (фіг. 3,ї) пристрій віднімання 25 утворює різницю вихідних напруг u пристроїв запам'ятовування 21, 22 25 (фіг. 3,д), R яка пропорційна другому наближенню p 2 ВП 7 перетворюється в аналогово-цифровому перетворювачі 26 і запам'ятовується мікропроцесором 16. В момент часу 2 , що відповідає закінченню C першого ступеня зарядження p , командою r (фіг. 3,з) з мікропроцесора 16 на короткий час відкривається ключ 20 і на вхід запам'ятовуючого пристрою u 22 подається напруга 18 з виходу диференційноU го підсилювача 13, яка тепер пропорційна сумі 0 , R падінню напруг на опорі розчину s і поляризаR ційному опорі p (фіг. 3,г). З деякою затримкою по команді s з мікропроцесору 16 (фіг. 3,і) пристрій віднімання 25 утворює різницю вихідних напруг запам'ятовуючих пристроїв 21 і 22. Різниця напруг u24 (фіг. 3,д) на виході пристрою віднімання 25 В момент часу 5 , що відповідає закінченню C r другого ступеня зарядження p , командою 1 (фіг. 3,и) з мікропроцесору 16 на короткий час відкривається ключ 20 і на вхід запам'ятовуючого пристрою u 22 подається нова підвищена напруга 18 (фіг. 3,б) з виходу диференційного підсилювача 13, яка U R пропорційна сумі 0 та падінням напруг на s і Rp (фіг. 3,г). s З деякою затримкою по команді 1 в момент В момент часу 7 , що відповідає кінцю періоду вимірювання і початку періоду підготовки, ключ 15 командою р мікропроцесору 16 відключає джерело 17 поляризуючої напруги, починається розC ряд p , а також проходить скид запам'ятовуючих пристроїв 21 і 22 у початковий стан командою u (фіг. 3,й) мікропроцесору 16. Одночасно мікропроR цесор розраховує дійсне значення p за наведеною формулою, яке відтворюється на цифровому реєстраторі. Запропонована корисна модель забезпечує автоматизацію процесу вимірювання проміжних значень та розрахунку дійсного значення поляризаційного опору. Це суттєво підвищує оперативність і точність корозійного моніторингу і розширює сферу застосування таких вимірювачів. 7 Комп’ютерна верстка Д. Шеверун 52523 8 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMicroprocessor measuring device for polarization resistance
Автори англійськоюHerasymenko Yurii Stepanovych, Vasyliev Heorhii Stepanovych
Назва патенту російськоюМикропроцессорный измеритель поляризационного сопротивления
Автори російськоюГерасименко Юрий Степанович, Васильев Георгий Степанович
МПК / Мітки
МПК: G01N 27/28
Мітки: опору, поляризаційного, вимірювач, мікропроцесорний
Код посилання
<a href="https://ua.patents.su/4-52523-mikroprocesornijj-vimiryuvach-polyarizacijjnogo-oporu.html" target="_blank" rel="follow" title="База патентів України">Мікропроцесорний вимірювач поляризаційного опору</a>
Вимірювач поляризаційного опору

Номер патенту: 2173
Опубліковано: 15.12.2003
Автор: Герасименко Юрій Степанович
МПК: G01N 27/28
Мітки: вимірювач, поляризаційного, опору
Формула / Реферат:
Вимірювач поляризаційного опору, що містить двохелектродний вимірювальний перетворювач, один електрод якого з’єднаний з виходом перетворювача напруга поляризації-струм поляризації, а другий - із зразковим резистором, неінвертувальним входом диференційного підсилювача і інвертувальним входом перетворювача напруга поляризації-струм поляризації, неінвертуальний вхід якого приєднаний до джерела поляризуючої напруги, перший та другий пристрої...
Вимірювач потужності, повного, активного та реактивного опору, ємності, індуктивності та частоти
Номер патенту: 48459
Опубліковано: 15.08.2002
Автори: Пазюк Олексій Вячеславович, Соченко Петро Степанович, Зеленков Олександр Аврамович
МПК: G01R 27/00, G01R 27/02
Мітки: ємності, потужності, індуктивності, вимірювач, повного, частоти, реактивного, опору, активного
Формула / Реферат:
Вимірювач потужності, повного, активного та реактивного опору, ємності, індуктивності та частоти, який містить послідовно з'єднані навантаження, еталонний резистор та перший блок вимірювань, в який входять перший, другий та третій квадратори, суматор, перший, другий та третій перетворювачі, перший та другий блоки ділення, перший, другий, третій та четвертий блоки множення та перший реєстратор, причому перший вивід навантаження з'єднаний з...
Спосіб вимірювання поляризаційного потенціалу підземних струмопровідних споруд
Номер патенту: 19130
Опубліковано: 15.12.2006
Автори: Орищин Олександр Миколайович, Коваленко Олександр Іванович, Степачов Віктор Юрійович, Олійник Геннадій Іванович
МПК: G01R 19/00, C23F 13/00, G01N 17/00
Мітки: поляризаційного, підземних, струмопровідних, спосіб, потенціалу, вимірювання, споруд
Формула / Реферат:
1. Спосіб вимірювання поляризаційного потенціалу підземних струмопровідних споруд, що полягає в тому, що потенціал фіксується в момент вимикання джерела поляризації вимірювальним пристроєм, під'єднаним між спорудою і електродом порівняння, який відрізняється тим, що вимірюють потенціал електрода порівняння в момент одночасного вимикання щонайменше двох джерел поляризації і фіксують у вигляді діаграми, що візуалізується на пристрої, при цьому...
Вимірювач температури або опору, еквівалентного опору зразкового резистора, і спосіб, реалізований в ньому
Номер патенту: 85243
Опубліковано: 12.01.2009
Автори: Гайський Павло Віталійович, Гайскій Віталій Олександрович
МПК: G01K 7/16, H01C 13/00
Мітки: зразкового, еквівалентного, спосіб, реалізований, температури, ньому, вимірювач, резистора, опору
Формула / Реферат:
1. Вимірювач температури або опору, еквівалентного опору зразкового резистора, що містить ланцюжок з розміщених локально на загальній теплопровідній підкладці і послідовно підключених n резисторів з відомими залежностями їх опорів від температури, який відрізняється тим, що використаний ланцюжок з n резисторів з різними залежностями їх опорів від температури, при цьому один зовнішній вивід ланцюжка підключений до входу генератора струму,...
Шумовий вимірювач електрошкірного опору
Номер патенту: 29174
Опубліковано: 10.01.2008
Автори: Санніков Володимир Юрійович, Скрипник Юрій Олексійович
МПК: A61B 5/05, A61H 39/00
Мітки: опору, електрошкірного, шумовий, вимірювач
Формула / Реферат:
Шумовий вимірювач електрошкірного опору, що містить блок вимірювальних електродів і блок базових електродів, з'єднаних відповідно з входами і виходами двох комутаторів, послідовно з'єднані смуговий підсилювач шумової напруги, квадратичний детектор, фільтр нижніх частот, аналого-цифровий перетворювач, мікроконтролер і персональний комп'ютер, цифрові виходи мікроконтролера з'єднані з керуючими входами комутаторів, автоматичний ключ і пару...
Попередній патент: Апарат для фільтрації рідинних суспензій
Наступний патент: Процес формування конструктивних елементів бурових штанг
Випадковий патент: Композиція фотокаталітичного покриття