Пристрій для захисту від юзу колісних пар електрорухомого составу
Номер патенту: 5253
Опубліковано: 28.12.1994
Автори: Аронов Марк Ісакович, Яцько Сергій Іванович, Заріцька Людмила Яківна, Морошкін Боріс Ніколаєвіч
Формула / Реферат
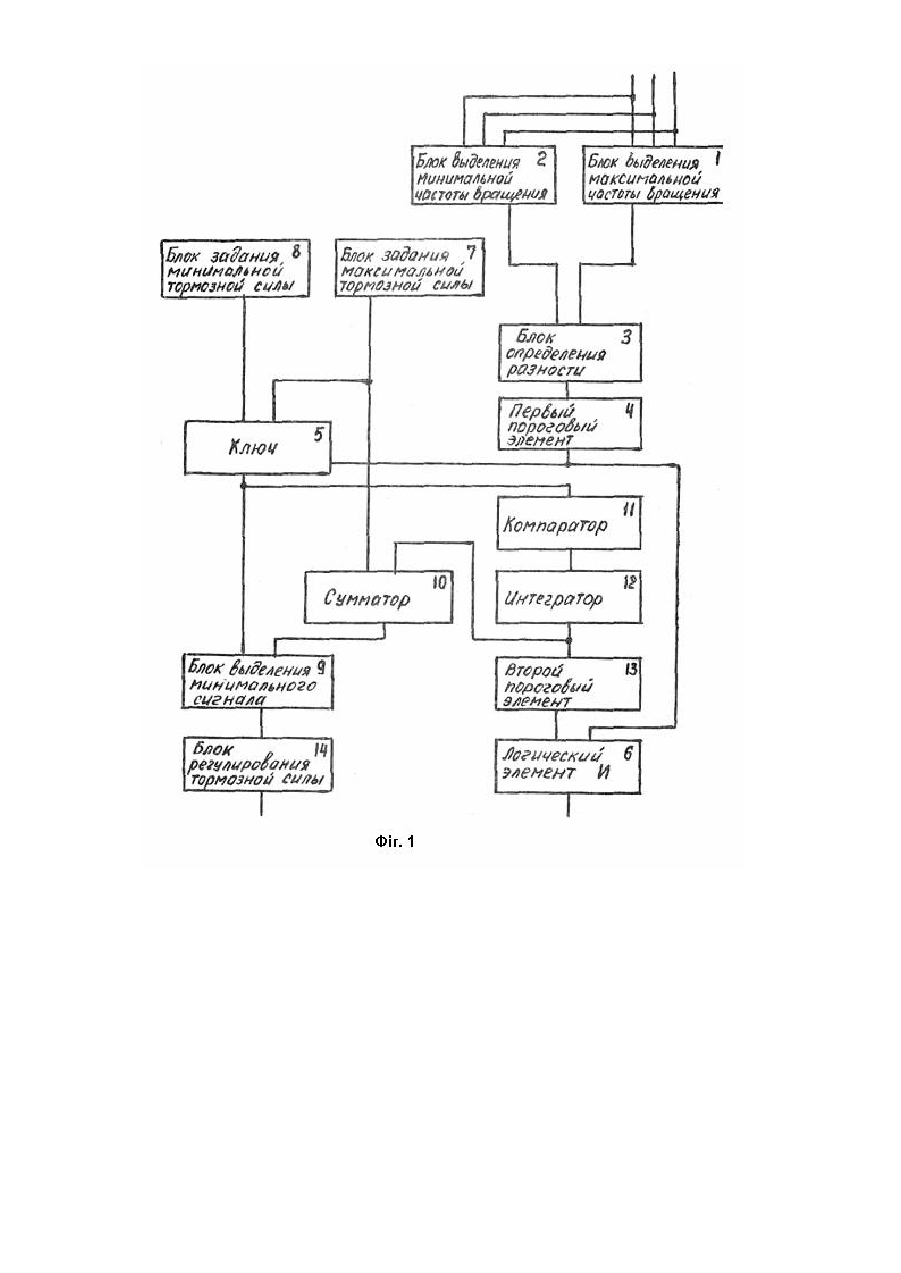
Устройство для защиты от юза колесных пар электроподвижного состава, содержащее блоки выделения максимальной и минимальной частот вращения, выходы которых соединены с входами блока определения разности, выход которого подключен ко входу первого порогового элемента, выход которого соединен с управляющим входом ключа, интегратор, выход которого соединен со входом второго порогового элемента и одним из входов сумматора, песочницы, отличающийся тем, что оно снабжено блоками задания максимальной и минимальной тормозной силы, компаратором, логическим элементом И, блоком выделения минимального сигнала и блоком регулирования тормозной силы, при этом выход блока задания максимальной тормозной силы соединен с другим входом сумматора и первым входом ключа, второй вход которого подключен к выходу блока задания минимальной тормозной силы, а выход соединен со входом компаратора, выход которого соединен с входом интегратора, один из входов логического элемента И соединен с выходом первого порогового элемента, другой вход ο выходом второго порогового элемента, а выход-с цепями управления песочниц, первый вход блока выделения минимального сигнала соединен с выходом сумматора, второй вход - с выходом ключа, а выход со входом блока регулирования тормозной силы.
Текст
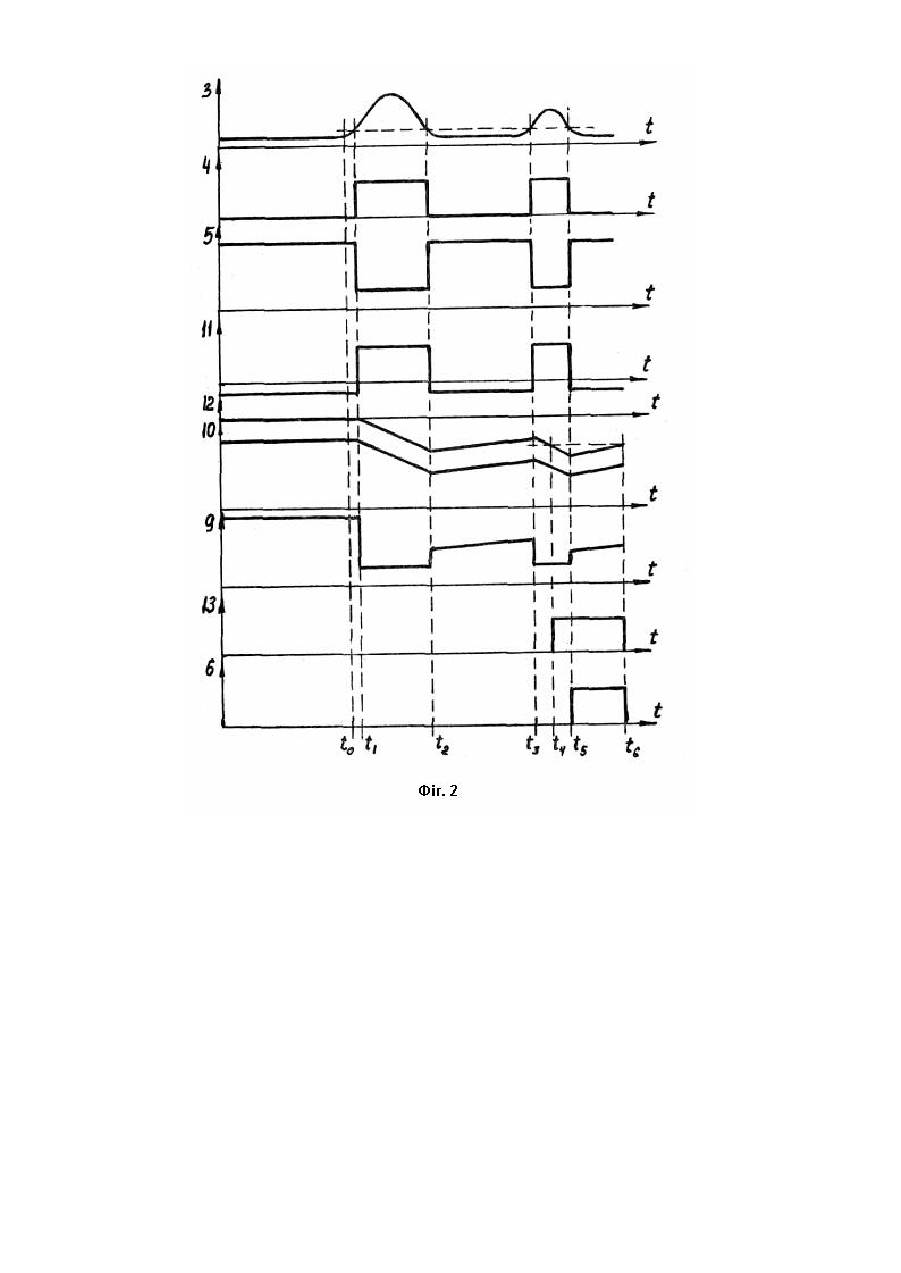
Изобретение относится к железнодорожному транспорту и может быть использовано для защиты колесных пар электроподвижного состава от избыточного скольжения. Наиболее близким к заявленному является устройство для защиты от юза колесных пар электроподвижного состава, содержащее датчики частоты вращения колесных пар. включенные через преобразователи к входам блоков выделения минимального и максимального сигналов, выход блока выделения минимального сигнала соединен с одним из входов блока определения разности, а выход блока выделения максимального сигнала через блок эталонной скорости с другим входом блока определения разности, выход которого подключен к одному из входов первого порогового элемента непосредственно, а к одному из входов второго порогового элемента через дифференцирующий блок. Выходы первого и второго элементов подключены к входам сумматора, соединенного с выходом с одним из входов сумматора, соединенного с одним из входов блока умножения, выход которого подключен к входу исполнительного блока. Выход блока эталонной скорости подключен к другим выходам первого и второго пороговых элементов, блоку умножения и одному из входов второго блока выделения разности, второй вход которого подключен к блоку выделения максимального сигнала. Выход второго блока выделения разности через третий пороговый элемент подключен к входу интегратора и ключа, выходы которых подключены к одному из входов че твертого порогового элемента, второй вход которого подключен к выходу блока эталонной скорости, выход четвертого порогового элемента управляет работой устройства управления песочницами. Недостатком известного устройства является то. что оно не обеспечивает надежную защиту от юза, что обусловлено возникающим вследствие наличия зоны нечувстви тельности устройства (из-за зависимости от датчиков скорости) несоответствием между развиваемым и необходимым с точки зрения коэффициента сцепления тормозным условием, что приводит к росту величины проскальзывания и снижению эффективности торможения при движении на участках большой протяженности с низким коэффициентом сцепления. К снижению надежности известного устройства приводит также то, что момент начала подсыпки песка не зависит от величины скольжения колесных пар, что может при наличии большого скольжения в момент подачи песка привести к динамическому удару по механической передаче и. соответственно, снижает надежность электроподвижного состава в целом. В основу изобретения поставлена задача усовершенствования устройства для защиты от юза колесных пар электроподвижного состава, путем введения элементов управления и регулирования и новых взаимосвязей между, элементами устройства, обеспечивающих корректировку задаваемой величины тормозной силы в зависимости от величины коэффициента сцепления и корректировку момента подачи песка в зависимости от величины скольжения колесных пар, чем достигается повышение надежности работы устройства. Поставленная задача решается тем. что в устройство для защиты от юза колесных пар электроподвижного состава, содержащее блоки выделения максимальной и минимальной частот вращения, выходы которых соединены со входами блока определения разности, выход которого соединен с управляющим входом ключа, интегратор, выход которого соединен с входом второго порогового элемента и одним из входов сумматора, песочницы, согласно изобретению, введены блоки задания максимальной и минимальной тормозной силы, компаратор, логический элемент И, блок выделения минимального сигнала и блок регулирования тормозной силы. при этом выход блока задания максимальной тормозной силы соединен с другим входом сумматора и первым входом ключа, второй вход которого подключен к выходу блока задания минимальной тормозной силы, а выход соединен со входом компаратора, выход которого соединен с входом интегратора, один из входов логического элемента И соединен с выходом первого элемента, другой вход - с вы ходом второго порогового элемента, а вы ход - с цепями управления песочниц, первый вход блока выделения минимального сигнала соединен с выходом сумматора, второй вход c вы ходом ключа, а выход - со входом блока регулирования тормозной силы. Введение в предлагаемое устройство блоков задания минимальной и максимальной тормозной силы. компаратора, логического элемента И, блока выделения минимального сигнала и блока регулирования тормозной силы, а также их взаимосвязей. позволяет использовать в совокупности сигналы логического элемента И, компаратора, ключа и сумматора для корректировки задаваемой величины тормозной силы в зависимости от величины коэффициента сцепления пары колесо-рельс и корректировки момента подачи песка в зависимости от величины скольжения колесных пар, что приводит к повышению надежности работы устройства. На фиг. 1 представлена блок-схема устройства для защиты о т юза колесных пар электроподвижного состава. На фиг. 2 - временные диаграммы, объясняющие работу устройства при наезде на участок большой протяженности с низким значением коэффициента сцепления. Устройство содержит блоки 1 и 2 выделения максимальной и минимальной частот вращения, выходы которых соединены с входами блока 3 определения разности сигналов, выход которого через первый пороговый элемент 4 подсоединен к управляющему входу ключа 5 и одному из входов логического элемента И 6, выход которого связан с цепями управления песочниц. Выход ключа 5 соединен с выходом блока 7 задания максимальной тормозной силы и блока 8 задания минимальной тормозной силы. Выход ключа 5 подключен к одному из входов блока 9 выделения минимального сигнала, второй вход которого соединен с выходом сумматора 10. Выход ключа 5 также подключен к выходу компаратора 11. Выход компаратора 11 подключен на вход интегратора 12, выход которого, в свою очередь, подключен на один из входов сумматора 10, а также через второй пороговый элемент 13 на другой вход ло гического элемента И 6. Второй вход сумматора 10 соединен с выходом блока 7 задания максимальной тормозной силы. Выход блока 9 выделения минимального сигнала соединен с входом блока 14 регулирования тормозной силы. Устройство работает следующим образом. В тормозном режиме при отсутствии юза величины сигналов, соответствующие частотам вращения колесных пар поступают на блоки 1 и 2 выделения максимальной и минимальной частот вращения. Эти сигналы незначительно отличаются друг от др уга и сигнал на выходе блока 3 определения разности не превышает значения сигнала первого порогового элемента 4 и на его выходе устанавливается нулевой сигнал, который поступает на вход логического элемента И 6 и управляющий вход ключа 5. При поступлении нулевого сигнала на управляющий вход ключа 5 обеспечивает подачу с блока 7 задания максимальной тормозной силы сигнала на вход блока 9 выделения минимального сигнала, на второй вход которого поступает сигнал с сумматора 10, равный величине сигнала блока 7 задания максимальной тормозной силы, так как сигнал, поступающий на его вход с интегратора 12, при длительном отсутствии юза равен нулю. Таким образом, с блока 9 выделения минимального сигнала на вход блока 14 регулирования поступает сигнал, равный сигналу на выходе блока 7 задания максимальной тормозной силы, заданной машинистом. При поступлении на управляющий вход ключа 5 нулевого сигнала с порогового элемента 4, ключ 5 обеспечивает прохождение сигнала с блока 7 задания максимальной тормозной силы на вход компаратора 11. При отсутствии юза на вход интегратора 12 с выхода компаратора 11 поступает сигнал отрицательной полярности. Сигнал на выходе интегратора 12 может быть только отрицательным или равным нулю. Этот сигнал поступает на вход сумматора 10 и на вход второго порогового элемента 13, выходной сигнал которого при данном входном сигнале будет равен нулю. Нулевой сигнал с выхода второго порогового элемента 13 поступает на вход логического элемента И 6. В случае возникновения юза на выход* блока 3 определения разности сигнал превысит пороговое значение первого порогового элемента 4 и на его выходе появляется сигнал, отличный от нуля. При этом ключ 5 переключается в положение, обеспечивающее подачу на вход блока 9 выделения минимального сигнала, сигнала с блока 8 задания минимальной тормозной силы. Кроме того, сигнал с блока 8 задания минимальной тормозной силы через ключ 5 поступает на вход компаратора 11, с выхода которого на вход интегратора 12 подается сигнал положительной полярности. Сигнал с выхода интегратора 12 поступает на один из входов сумматора 10, на второй вход которого поступает сигнал с блока 7 задания максимальной тормозной силы. В данном случае, сигнал на выходе сумматора 10 равен величине сигнала с блока 7 задания максимальной тормозной силы за вычетом величины сигнала на выходе интегратора 12. В течение периода времени, когда сигнал на выходе первого порогового элемента 4 отличен от нуля, сигнал на выходе сумматора 10 уменьшается за счет роста сигнала на выходе интегратора 12. Таким образом, на вход блока 9 выделения минимального сигнала поступают одновременно сигнал с блока 8 задания минимальной тормозной силы и сигнал с сумматора 10. На вход блока 14 в качестве задания поступает сигнал с выхода блока 8 задания минимальной тормозной силы. При прекращении юза на выходе первого порогового элемента 4 устанавливается нулевой сигнал, который переводит ключ 5 в состояние, обеспечивающее поступление через него сигнала с выхода блока 7 задания максимальной тормозной силы на один из входов блока 9 выделения минимального сигнала, на второй вход которого поступает сигнал с выхода сумматора 10, равный величине сигнала на выходе блока 7 задания максимальной тормозной силы за вычетом величины на выходе интегратора 12. При появлении на выходе первого порогового элемента 4 нулевого сигнала на вход компаратора 11 поступает сигнал, равный сигналу на выходе блока 7 задания максимальной тормозной силы. В результате этого на выходе компаратора 11 устанавливается сигнал отрицательной полярности, что вызывает уменьшение величины сигнала на выходе интегратора 12. В случае отсутствия повторного юза величина сигнала на выходе интегратора 12 уменьшается до нуля. При прекращении юза задание тормозной силы, поступающее с блока 9 выделения минимального сигнала на вход блока 14 регулирования тормозной силы, устанавливается до величины, равной величине сигнала на выходе блока 8 задания минимальной тормозной силы, равной сигналу на выходе блока 7 задания максимальной тормозной силы за вычетом величины сигнала на выходе интегратора 12. Таким образом, при прекращении юза задание тормозного усилия, поступающее на вход блока 14 регулирования тормозной силы, лишь через определенное время достигает значения, соответствующего сигналу на выходе блока 7 задания максимального тормозной силы. При повторном юзе сигнал на выходе интегратора 12 за время между двумя снижениями до минимальной величины тормозного усилия не успевает уменьшиться до нуля, поэтому он увеличивается от определенной величины, при этом может наступать момент, когда она превысит пороговое значение второго поворотного элемента 13 и на вход логического элемента И 6 поступает сигнал, отличный от нуля. Однако при юзе сигнал с логического элемента И 6 на включение песочниц не поступает, так как на его второй вход поступает с первого порогового элемента 4 сигнал, отличный от нуля. В свою очередь, с блока 9 выделения минимального сигнала на блок 14 регулирования тормозной силы поступает сигнал, равный сигналу на выходе блока 8 задания минимальной тормозной силы. При прекращении юза на выходе первого порогового элемента 4 устанавливается ноль, и, тем самым, разрешается подсыпка песка, если сигнал на выходе второго порогового элемента 13 отличен от нуля. Кроме того, на один из входов блока У выделения минимального сигнала поступает через ключ 5 сигнал, равный сигналу блока 7 задания максимальной тормозной силы. а на другой - равный сигналу блока 7 за вычетом сигнала на выходе интегратора 12, который поступает в блок 14 регулирования тормозной силы. Этот сигнал увеличивается до величины сигнала блока 7 задания максимальной тормозной силы с темпом, равным темпу уменьшения сигнала на выходе интегратора 12. На фиг. 2 представлена временная диаграмма, объясняющая работу устройства при наезде на участок большой протяженности с низким значением коэффициента сцепления. На фиг. 2 приняты следующие обозначения: по оси ординат - величины сигналов на выходе указанных блоков, по оси абсцисс - текущее время t0 - момент наезда на участок с низким значением коэффициента сцепления- t1-t2, t 3-t5 - временные интервалы, на протяжении которых сигнал на вы ходе блока 3 определения разности превышает пороговое значение порогового элемента 4, t4-t6 - временной интервал, на протяжении которого величина сигнала на выходе интегратора 12 превышает пороговое значение второго порогового элемента 13.
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for protection against skid of wheel pairs of electric rolling stock
Автори англійськоюAronov Mark Isakovych, Zaritska Liudmyla Yakivna, Yatsko Serhii Ivanovych
Назва патенту російськоюУстройство для защиты от юза колесных пар электроподвижного состава
Автори російськоюАронов Марк Исакович, Зарицкая Людмила Яковлевна, Яцко Сергей Иванович
МПК / Мітки
МПК: B60L 3/10
Мітки: електрорухомого, колісних, составу, захисту, юзу, пар, пристрій
Код посилання
<a href="https://ua.patents.su/4-5253-pristrijj-dlya-zakhistu-vid-yuzu-kolisnikh-par-elektrorukhomogo-sostavu.html" target="_blank" rel="follow" title="База патентів України">Пристрій для захисту від юзу колісних пар електрорухомого составу</a>
Пристрій для зсуву фази на 90 градусів
Номер патенту: 2056
Опубліковано: 20.12.1994
Автори: Кизилов Володимир Улянович, Лазуренко Олександр Павлович
МПК: G01R 25/00
Мітки: зсуву, пристрій, фазі, градусів
Формула / Реферат:
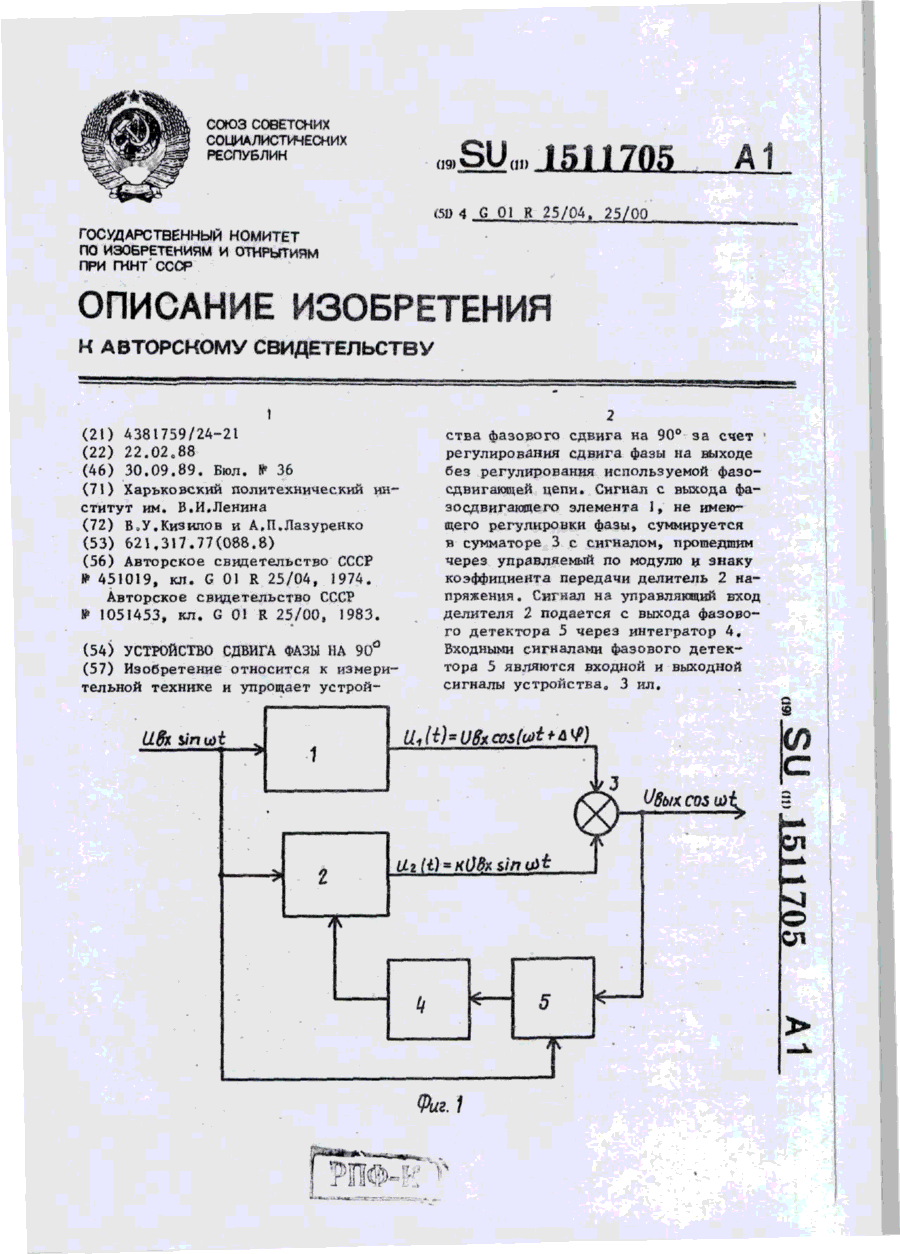
Устройство сдвига фазы на 90°, содержащее фазосдвигающий элемент, фазовый детектор и интегратор, вход которого соединен с выходом фазового детектора, один из входов которого соединен с входом фазосдвигающего элемента, являющегося входом устройства, отличающееся тем, что, с целью увеличения точности, в него введены управляемый по модулю и знаку коэффициента передачи делитель напряжения и сумматор, выход которого является выходом устройства и...
Пристрій для захисту від перевищення допустимої частоти обертання електродвигуна постійного струму
Номер патенту: 2794
Опубліковано: 26.12.1994
Автори: Монаєв Віктор Іванович, Бардамід Василь Іванович
МПК: H02H 7/093
Мітки: захисту, пристрій, допустимої, постійного, електродвигуна, частоти, струму, обертання, перевищення
Формула / Реферат:
1. Устройство для защиты от превышения допустимой частоты вращения электро-двигателя постоянного тока с электромагнитным возбуждением, содержащее первый элемент сравнения, вход которого через первый согласующий элемент соединен с датчиком частоты вращения двигателя, а выход через пороговый элемент - с аппаратом коммутации сетевого напряжения источника питания двигателя, вход второго элемента сравнения соединен с датчиком тока возбуждения...
Пристрій розпізнавання типу транспортних одиниць залізничого составу
Номер патенту: 3668
Опубліковано: 27.12.1994
Автори: Єрмошенко Анатолій Олександрович, Нор Олег Віталійович, Сальніков Ігор Михайлович
МПК: B61L 25/00
Мітки: пристрій, одиниць, типу, залізничого, составу, транспортних, розпізнавання
Формула / Реферат:
Устройство опознавания типа транспортных единиц железнодорожного состава, содержащее установленный на участке считывания оптический датчик наличия транспортной единицы, выходом соединенный с одним входом одного из ключевых элементов, триггеры, выход первого из которых соединен с одним входом второго, одновибратор, элементы И, вход одного из которых подключен к инверсному выходу третьего триггера, прямым выходом соединенного с одним входом...
Лічильник електроенергії
Номер патенту: 1742
Опубліковано: 25.10.1994
Автори: Смілянський Ігор Ісаакович, Кизилов Володимир Улянович, Давидов Анатолій Семенович
МПК: G01R 11/00
Мітки: електроенергії, лічильник
Формула / Реферат:
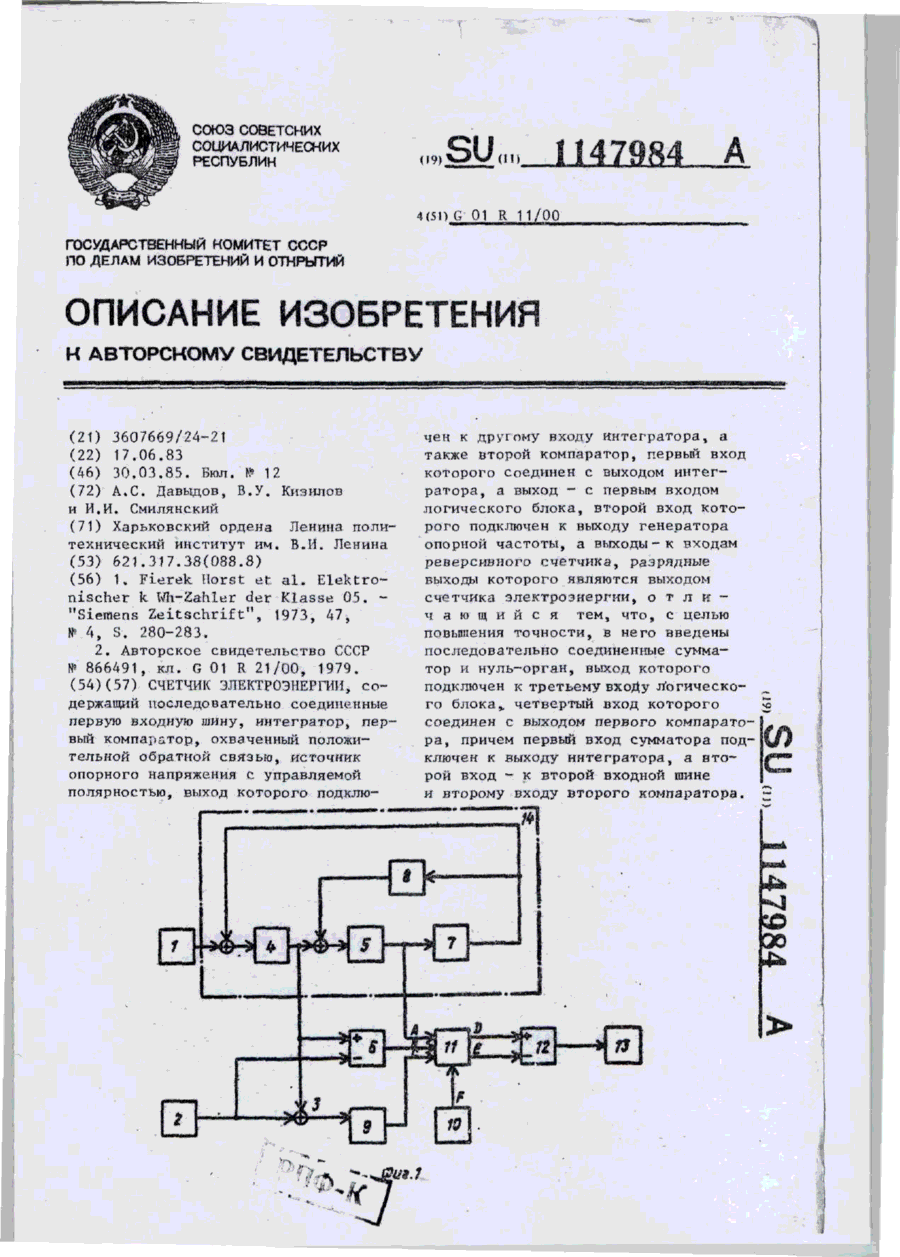
Счетчик электроэнергии, содержащий последовательно соединенные первую входную шину, интегратор, первый компаратор, охваченный положительной обратной связью, источник опорного напряжения с управляемой полярностью, выход которого подключен к другому входу интегратора, а также второй компаратор, первый вход которого соединен с выходом интегратора, а выход — с первым входом логического блока, второй вход которого подключен к выходу генератора...
Пристрій захисту батареї статичних конденсаторів з ізольованою нейтраллю від внутрішніх пошкоджень та перевантаження
Номер патенту: 2203
Опубліковано: 26.12.1994
Автор: Садовський Володимир Георгійович
МПК: H02H 7/00
Мітки: статичних, перевантаження, конденсаторів, пристрій, батареї, нейтраллю, ізольованою, захисту, внутрішніх, пошкоджень
Формула / Реферат:
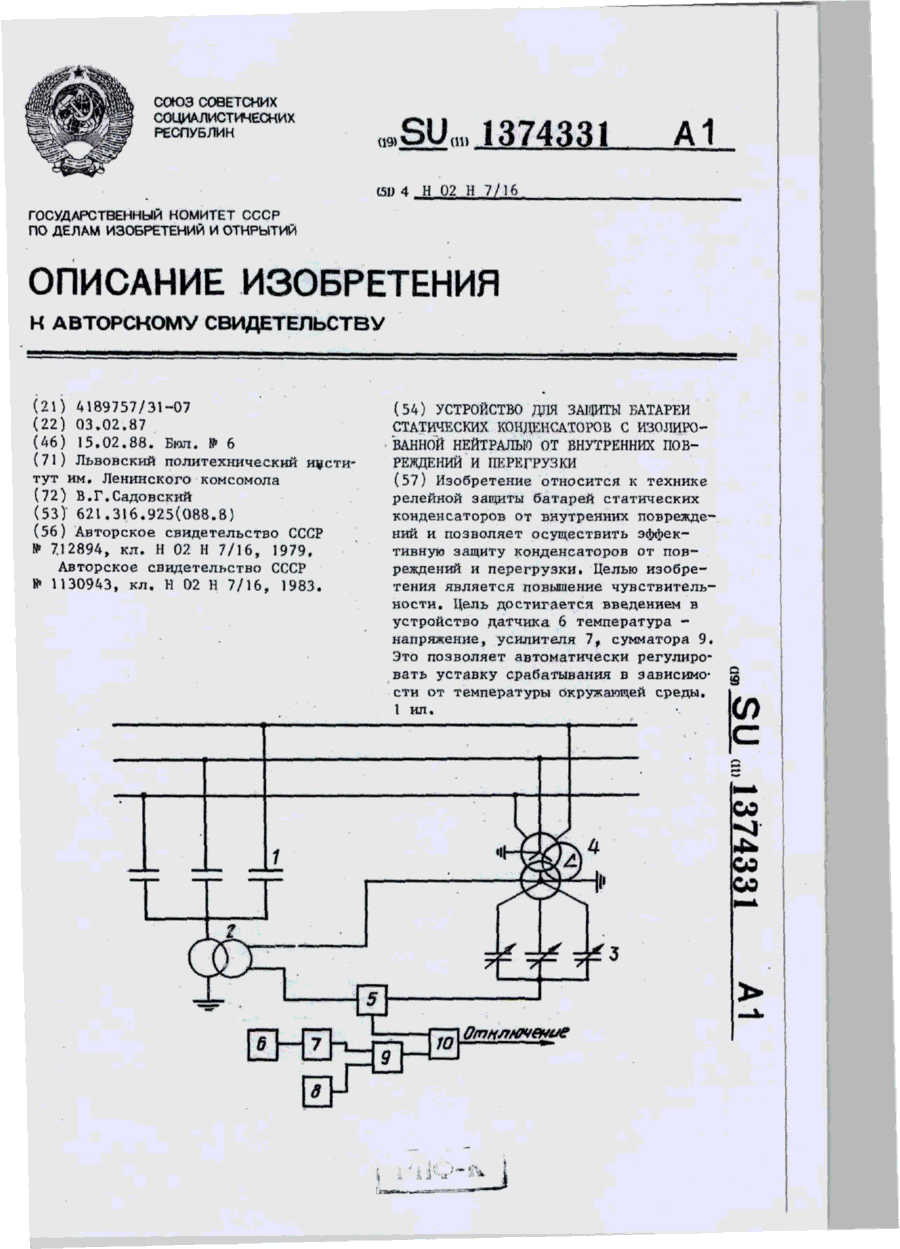
Устройство для защиты батарей статических конденсаторов с изолированной нейтралью от внутренних повреждений и перегрузки, содержащее трансформатор напряжения, первичная обмотка которого имеет клеммы для включения в нейтраль батареи статических конденсаторов, первый вывод вторичной обмотки трансформатора напряжения соединен с первым входом элемента сравнения, трехфазный трансформатор напряжения, первичная обмотка которого имеет клеммы для...
Попередній патент: Спосіб пластики дефектів м’яких тканин ступні
Наступний патент: Робочий орган розпушувача
Випадковий патент: Спосіб тверднення епоксидної композиції з використанням ультразвуку