Багатомодульна система відображення інформації з самоідентифікацією вузлів
Номер патенту: 53188
Опубліковано: 27.09.2010
Автори: Рощупкін Олексій Юрійович, Кочан Володимир Володимирович, Саченко Анатолій Олексійович
Формула / Реферат
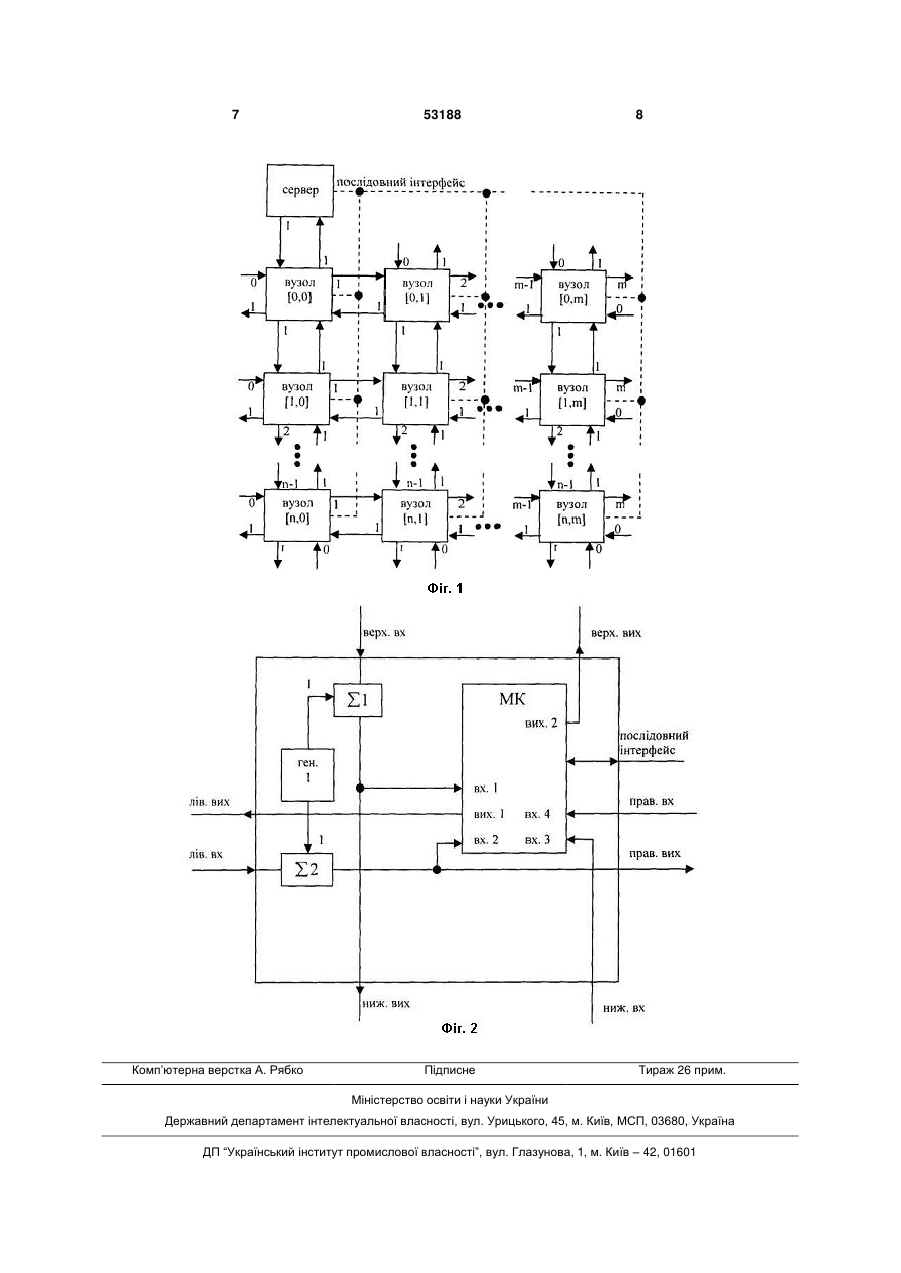
1. Багатомодульна система відображення інформації з самоідентифікацією вузлів, що складається з сервера та прямокутної матриці мікроконтролерних вузлів, об'єднаних спільним послідовним інтерфейсом, яка відрізняється тим, що мікроконтролери вузлів мають чотири додаткові входи (які можна відносно розміщення в матриці умовно назвати верхнім, нижнім, лівим і правим) і чотири додаткові виходи (які можна відносно розміщення в матриці умовно назвати верхнім, нижнім, лівим і правим), причому нижні виходи вузлів кожного рядка з'єднані з верхніми входами вузлів наступного рядка, нижні входи вузлів кожного рядка з'єднані з верхніми виходами вузлів наступного рядка, праві виходи вузлів кожного стовпця з'єднані з лівими входами вузлів наступного стовпця, праві входи вузлів кожного стовпця з'єднані з лівими виходами вузлів наступного стовпця, а на верхні входи верхнього рядка матриці, ліві входи лівого стовпця, нижні входи нижнього рядка і праві входи правого стовпця надходять коди нуля (крім верхнього входу лівого верхнього вузла, який під'єднано до виходу сервера).
2. Багатомодульна система відображення інформації з самоідентифікацією вузлів за п. 1, яка відрізняється тим, що вузол багатомодульної системи відображення інформації складається з мікроконтролерів, що керують матрицею світловипромінюючих елементів, містить два суматори і генератор одиниці, причому верхній і лівий входи вузлів підключені до перших входів відповідно першого і другого суматорів, до других входів яких підключено вихід генератора одиниці, вихід першого суматора підключено до першого входу мікроконтролера і нижнього виходу, вихід другого суматора підключено до другого входу мікроконтролера і правого виходу, нижній і правий входи вузла підключені до третього і четвертого входів мікроконтролера, а перший і другий виходи мікроконтролера підключені до лівого і верхнього виходів вузла відповідно.
Текст
1. Багатомодульна система відображення інформації з самоідентифікацією вузлів, що складається з сервера та прямокутної матриці мікроконтролерних вузлів, об'єднаних спільним послідовним інтерфейсом, яка відрізняється тим, що мікроконтролери вузлів мають чотири додаткові входи (які можна відносно розміщення в матриці умовно назвати верхнім, нижнім, лівим і правим) і чотири додаткові виходи (які можна відносно розміщення в матриці умовно назвати верхнім, нижнім, лівим і правим), причому нижні виходи вузлів кожного рядка з'єднані з верхніми входами вузлів наступного рядка, нижні входи вузлів кожного рядка з'єднані з верхніми виходами вузлів наступного рядка, праві виходи вузлів кожного стовпця з'єднані з лівими входами вузлів наступного стовпця, U 2 (19) 1 3 Простішим є метод і пристрій описаний в [4]. В ньому весь відеопотік проходить через головний пристрій (Master device), який розділяє зображення на окремі секції, кожна з яких отримує додаткові атрибути. Тому кожен модуль приймає і обробляє тільки свою частину зображення. Це спрощує обробку зображення модулями і дозволяє їх уніфікувати [5]. Однак тоді виникає задача ідентифікації позиції кожного модуля у складі системи в цілому. Для уніфікації модулів системи їх запропоновано робити "прозорими" [6]. Інформаційні сигнали поступають на модуль і виходять з нього (сигнали R/6, G/6, В/6). Однак в [6] питання автоматичної ідентифікації модулів в системі не вирішено. Хоча автоматична ідентифікація модулів в багатомодульній системі відображення (самоідентифікація) має ряд переваг, головним з яких є відсутність помилок при технічному обслуговуванні та ремонті системи, простота її нарощування, а також повна взаємозамінність модулів. Найближчим аналогом запропонованого технічного рішення є метод активації елементів табло [7], який базується на комбінації синхронізуючих сигналів по стовпцях (Columns) і рядках (Rows). Наявність цих сигналів дозволяє кожному модулю сприймати свою порцію інформації за рахунок того, що модуль сприймає інформацію тільки тоді, коли сигнали стовпців та рядків співпадають. При цьому модуль може пропускати через себе всю інформацію ("бути прозорим"), однак сприймати тільки потрібну інформацію. Це дозволяє уніфікувати модулі згідно [5] без необхідності їх ускладнення. Однак кількість модулів в системі чітко обмежена кількістю стовпців і рядків. Тому, нарощення модулів можливе тільки в цих межах. Задачею корисної моделі є створення багатомодульної системи відображення інформації з самоідентифікацією вузлів, яка може розширюватися незалежно від початкового стану і не вимагає наперед визначеного максимального числа модулів. Поставлена задача досягається за рахунок того, що багатомодульна система відображення інформації з самоідентифікацією вузлів складається з сервера та прямокутної матриці мікроконтролерних вузлів, об'єднаних спільним послідовним інтерфейсом. Мікроконтролери вузлів мають чотири додаткові входи (які можна відносно розміщення в матриці умовно назвати верхнім, нижнім, лівим і правим) і чотири додаткові виходи (які можна відносно розміщення в матриці умовно назвати верхнім, нижнім, лівим і правим). Причому нижні виходи вузлів кожного рядка з'єднані з верхніми входами вузлів наступного рядка. Нижні входи вузлів кожного рядка з'єднані з верхніми виходами вузлів наступного рядка. Праві виходи вузлів кожного стовпця з'єднані з лівими входами вузлів наступного стовпця. Праві входи вузлів кожного стовпця з'єднані з лівими виходами вузлів наступного стовпця. На верхні входи верхнього рядка матриці, ліві входи лівого стовпця, нижні входи нижнього рядка і праві входи правого стовпця поступають коди нуля. Крім того, кожен вузол багатомодульної системи відображення інформації, який складається з мікроконтролерів, що керують матрицею 53188 4 світловипромінюючих елементів, відрізняється тим, що в його склад введено два суматори і генератор одиниці. Верхній і лівий входи вузлів підключені до перших входів відповідно першого і другого суматорів, до других входів яких підключено вихід генератора одиниці. Вихід першого суматора підключено до першого входу мікроконтролера і нижнього виходу. Вихід другого суматора підключено до другого входу мікроконтролера і правого виходу. Ніжній і правий входи вузла підключені до третього і четвертого входив мікроконтролера, а перший і другий виходи мікроконтролера підключені до лівого і верхнього виходів вузла відповідно. Суть корисної моделі пояснюють структурні схеми, представлені на Фіг.1 і Фіг.2. На Фіг.1 представлена структурна схема багатомодульної системи відображення інформації з самоідентифікацією вузлів в цілому. На Фіг.2 представлена структурна схема мікропроцесорного вузла. Структурна схема багатомодульної системи відображення інформації з самоідентифікацією вузлів, представлена на Фіг.1, складається з серверу та матриці мікроконтролерних вузлів. Структурна схема мікроконтролерного вузла, представлена на Фіг.2, складається з мікроконтролеру, суматора 1, суматора 2 та генератора одиниць. Самоідетнифікація модулів системи відбувається у чотири етапи (Фіг.2.): 1. Присвоєння значення "-1" всім регістрам модулів х; 2. Визначення модуля [0,0]; 3. Почергова ініціалізація модулів першого стовпця матриці [0,0]...[n,0]; 4. Паралельна ініціалізація рядків матриці. У початковому стані системи після ввімкнення сервер, через послідовний інтерфейс, встановлює значення всіх внутрішніх регістрів мікроконтролера х та у в "-1", що дає можливість визначити верхній лівий модуль за адресою [0,0] (Фіг.1). На другому етапі самоідентифікації сервер передає через послідовний інтерфейс байт =0 по шині послідовного інтерфейсу всім під'єднаним модулям, які згодом переходять у стан прослуховування верхніх вхідних портів. Потім сервер передає сигнал по нижній вихідній лінії і модуль, який його отримав по верхній вхідній лінії, формує сигнал підтвердження по верхній вихідній лінії, що він і є першим модулем, під'єднаним до серверу. При цьому в обидва регістри х та у мікроконтролера модуля заноситься цифра 0. Якщо модуль не отримав сигнал по верхній вхідній лінії, запускається таймер і модуль залишається на заданий час в стані прослуховування верхньої вхідної лінії. Як тільки сервер отримав сигнал підтвердження від модуля [0,0], другий етап вважається завершеним. Якщо ж відповідь по вхідній лінії по закінченню часу очікування не прийшла, сервер формує сигнал про помилку. На третьому етапі самоідентифікації сервер передає байт =1 по шині послідовного інтерфейсу всім пристроям, що під'єднані до неї. Після цього всі модулі переходять в стан прослуховування верхньої вхідної лінії, а модуль [0,0] передає сигнал запиту по нижній вихідній лінії. 5 Якщо по верхній вхідній лінії поступає логічна одиниця від попереднього модуля, то модуль встановлює сигнал на вихідній верхній лінії також в одиницю. В противному випадку запускається таймер і модуль залишається на заданий час в стані прослуховування верхньої вхідної лінії. При цьому кожен модуль, в першому стовпці матриці, починаючи з модуля [0,0] (х=0, у=0) (Фіг.1), передає наступному модулю свої координати через нижню вихідну лінію. Наступні модулі записують передані значення регістрів, інкрементуючи при цьому значення регістра х. Якщо один з модулів не отримає сигналу підтвердження на вхід нижньої вхідної лінії, це означатиме, що він в ланцюгу останній. Після цього модуль передає по лінії послідовного інтерфейсу значення свого регістру х. Сервер зберігає значення переданого байту. На четвертому етапі самоідентифікації сервер передає байт =2 по шині послідовного інтерфейсу всім модулям, що під'єднані до неї. Після цього кожен модуль перевіряє вміст своїх регістрів х тау, і якщо їх значення рівні "-1", модуль переходить в стан прослуховування лівої вхідної лінії. В противному випадку (модуль знаходиться в першому стовпці матриці і значення регістрів х та у рівні 0) модуль передає по правій вихідній лінії сигнал запиту. Отримавши сигнал запиту по лівій вхідній лінії, модуль передає сигнал по правій вихідній лінії =1, в противному випадку - формує повідомлення про помилку. Після того, як модуль отримав у відповідь по правій вхідній лінії логічну одиницю, він по правій вихідній лінії передає почергово значення своїх регістрів х та у. Наступний модуль зберігає прийняті координати у регістрах мікроконтролеру х та у та інкрементує значення регістра у. Якщо ж по правій вхідній лінії сигнал підтвердження не прийшов, модуль вважається крайнім, і він по лінії послідовного інтерфейсу передає серверу значення свого регістру у. Після завершення етапу ініціалізації в усіх регістрах х та у зберігаються значення порядкових номерів модулів. Таким чином, кожен модуль 53188 6 "знає" своє місце розташування в системі відображення, а сервер отримує значення розміру масиву модулів, який може бути представлений в якості доступної відеопам'яті. Перевагою багатомодульної системи відображення інформації з самоідентифікацією вузлів є їхня прозорість, не прив'язаність до наперед визначеного числа модулів відображення, можливість їхньої взаємозамінності. Кожен модуль містить однакову апаратну та програмну частину, що дає можливість не прив'язувати функції модуля до його місця розташування а при збиранні, технічному обслуговуванні та ремонті системи відображення не потрібно мати спеціальних знань, що забезпечує потужний економічний ефект, та розширює галузі практичного застосування. Література: 1. Проэктирование цифровых устройств на однокристальных микроконтралерах. В.В. Сташин, А.В. Урусов, О.Ф. Мологонцева. М.: Энергоатомиздат. 1990. - 224с. 2. (PCT/JP2002/009235) DISPLAY DEVICE AND CONTROL SYSTEM THEREOF. 3. (PCT/JP2007/063154) INFORMATION DISPLAY DEVICE, INFORMATION DISPLAY METHOD, AND INFORMATION DISPLAY PROGRAM. 4. (PCT/US1999/013587) A METHOD OF AND APPARATUS FOR PARTITIONING, SCALING AND DISPLAYING VIDEO AND/OR GRAPHICS ACROSS SEVERAL DISPLAY DEVICES. 5. Electronic signs. Discovery science/how its made/ Season One/Episode 7 (http://rutube.ru/tracks/43794.html?v=59140490680b4 34ede6bb27cc4d8clca), (http://science.discovery.com/fansites/howitsmade/epi sode-guide/episode-guide.html). 6. (PCT/US2006/026130) TECHNIQUES TO SWITCH BETWEEN VIDEO DISPLAY MODES. 7. (PCT/US2005/034198) SYSTEMS AND METHODS OF ACTUATING MEMS DISPLAY ELEMENTS. 7 Комп’ютерна верстка А. Рябко 53188 8 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMultimodule display system having unit selfidentification
Автори англійськоюRoschupkin Oleksii Yuriiovych, Kochan Volodymyr Volodymyrovych, Sachenko Anatolii Oleksiiovych
Назва патенту російськоюМногомодульная система отображения информации с самоидентификаций узлов
Автори російськоюРощупкин Алексей Юрьевич, Кочан Владимир Владимирович, Саченко Анатолий Алексеевич
МПК / Мітки
МПК: H03K 19/177, H03K 19/173
Мітки: самоідентифікацією, вузлів, система, багатомодульна, відображення, інформації
Код посилання
<a href="https://ua.patents.su/4-53188-bagatomodulna-sistema-vidobrazhennya-informaci-z-samoidentifikaciehyu-vuzliv.html" target="_blank" rel="follow" title="База патентів України">Багатомодульна система відображення інформації з самоідентифікацією вузлів</a>
Пристрій відображення інформації
Номер патенту: 10824
Опубліковано: 25.12.1996
Автори: Богуславський Ромен Євелевич, Коломийцев Сергій Олексійович
МПК: G09G 5/36
Мітки: пристрій, інформації, відображення
Формула / Реферат:
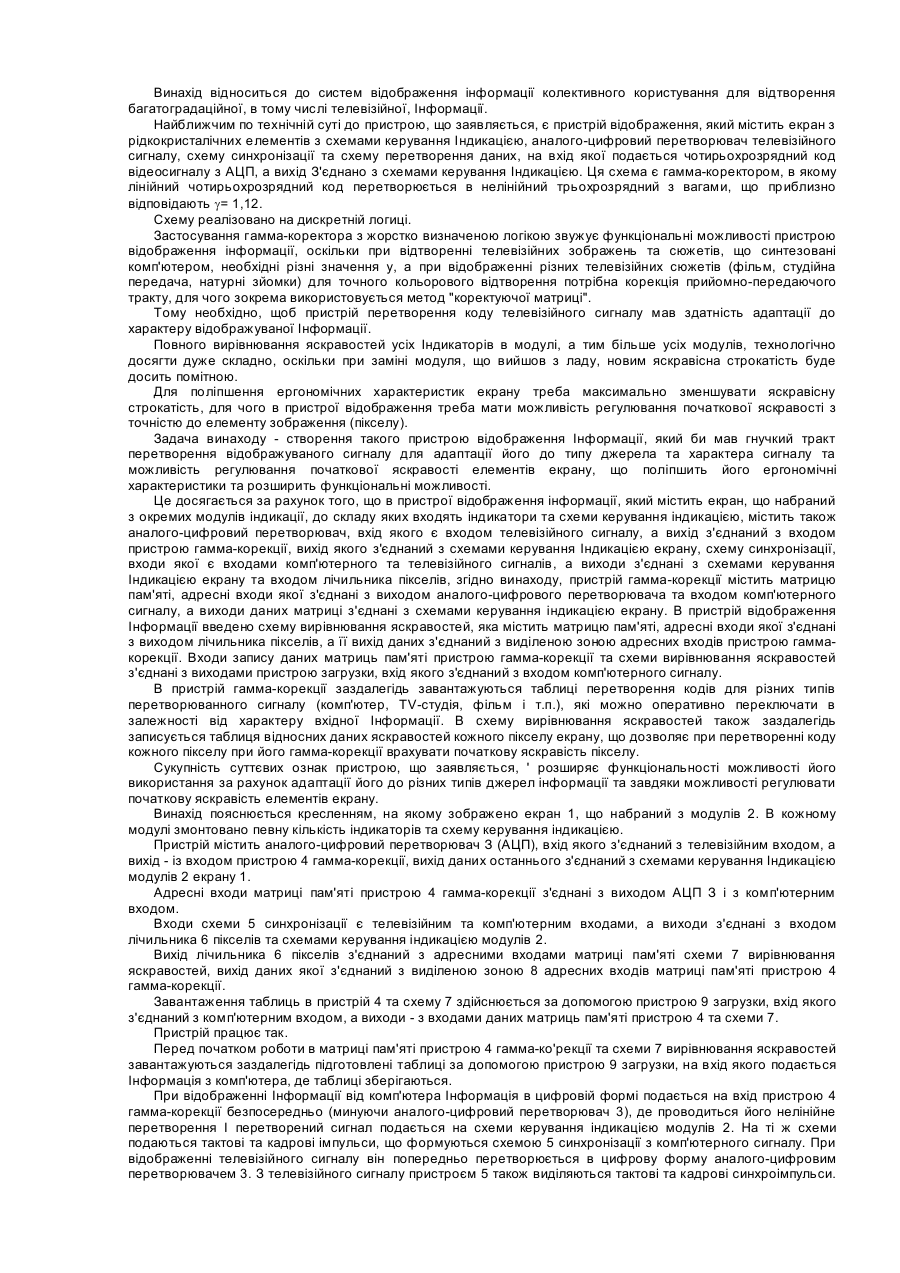
Пристрій відображення інформації, який містить екран, що набраний з окремих модулів індикації, до складу яких входять індикатори та схеми керування індикацією, містить також аналого-цифровий перетворювач, вхід якого є входом телевізійного сигналу, а вихід з'єднаний з входом пристрою гамма-корекції, вихід якого з'єднаний з схемами керування індикацією екрану, схему синхронізації, входи якої є входами комп'ютерного та телевізійного сигналів, а...
Система відображення інформації
Номер патенту: 30217
Опубліковано: 11.02.2008
Автори: Мусієнко Максим Павлович, Савчук Олег Леонідович, Томенко Віталій Іванович
МПК: G06F 17/00
Мітки: інформації, система, відображення
Формула / Реферат:
Система відображення інформації, що містить пристрої відображення графічної та/або звукової інформації, електронний засіб програмного керування, що знаходиться окремо на Інтернет-сервері та має пристрій вводу/виводу інформації, здійснює фільтрацію, контроль, зберігання та обробку інформаційних даних та направляє їх будь-яким каналом зв'язку: мобільним, через радіоелектронні сигнали або через дроти, на портативний пристрій вводу/виводу, що...
Система відображення інформації

Номер патенту: 26702
Опубліковано: 10.10.2007
Автори: Савчук Олег Леонідович, Мусієнко Максим Павлович
МПК: G06Q 10/00
Мітки: відображення, інформації, система
Формула / Реферат:
1. Система відображення інформації, що містить пристрої відображення графічної та/або звукової інформації, електронний засіб програмного керування, портативний засіб вводу/виводу інформації, яка відрізняється тим, що пристрої відображення інформації можуть розміщуватися як на рухомих так і нерухомих об'єктах, електронний засіб програмного керування знаходиться окремо на Інтернет-сервері і містить пристрій вводу/виводу інформації, здійснює...
Каркас для пристрою відображення інформації з принаймні однією поверхнею відображення
Номер патенту: 74438
Опубліковано: 15.12.2005
Автор: Льотель Франсуа
Мітки: відображення, принаймні, каркас, пристрою, однією, поверхнею, інформації
Формула / Реферат:
1. Каркас (1) для пристрою відображення інформації з принаймні однією поверхнею (11) відображення, який містить принаймні один лист з по суті твердого та гнучкого матеріалу, який має згадану поверхню (11) відображення, напружувальні засоби (10, 20, 21) для згинання поверхні (11) відображення листа та утримувальні засоби (9, 19, 5) для утримування поверхні (11) відображення листа у зігнутому стані, які розміщені навпроти напружувальних засобів...
Пристрій для відображення текстової і графічної інформації
Номер патенту: 25406
Опубліковано: 10.08.2007
Автори: Гаращенко Сергій Олександрович, Попенко Віктор Олександрович
МПК: G09G 3/00
Мітки: текстової, інформації, графічної, пристрій, відображення
Формула / Реферат:
1. Пристрій для відображення текстової і графічної інформації, що містить світловий екран, який включає щонайменше один екранний модуль, блок комутації, блок пам'яті, блок керування інформацією у вигляді процесора з інформаційним входом і інформаційним виходом, з'єднаним через блок комутації зі світловим екраном, і джерело живлення, який відрізняється тим, що інформаційний вхід процесора з'єднаний з приймачем сигналів цифрового...
Попередній патент: Пристрій для зміцнення берегів або русел
Наступний патент: Спосіб лікування гастродуоденопатій, індукованих нестероїдними протизапальними препаратами, у хворих на остеоартроз
Випадковий патент: Застосування тималіну як речовини з антистресовими властивостями