Пасивна система вимірювання координат джерел випромінювання
Номер патенту: 52632
Опубліковано: 15.01.2003
Автори: Єна Григорій Олександрович, Черниш Станіслав Костянтинович
Формула / Реферат
Пасивна система вимірювання координат джерел випромінювання, що містить щонайменше дві просторово рознесені пеленгаторні станції і центральний пост, з'єднані двостороннім зв'язком з каналом зв'язку, вихід центрального поста є виходом системи, яка відрізняється тим, що в неї додатково введені на кожну пеленгаторну станцію НВЧ комутатор, блок формування коду вхідних сигналів (БФКВС), блок формування цілі (БФЦ), дешифратор, постійний запам'ятовуючий пристрій (ПЗП), суматор, схема віднімання і три ключі, при цьому три виходи НВЧ комутатора з'єднані відповідно з трьома входами пеленгаторної станції і трьома входами БФКВС, вихід якого з'єднаний послідовно з БФЦ і з дешифратором, три виходи якого з'єднані відповідно з керуючими входами трьох ключів, другий вихід пеленгаторної станції з'єднаний з першим входом ПЗП, першим входом суматора і першим входом схеми віднімання, перший вихід ПЗП з'єднаний з другим входом суматора і другим входом схеми віднімання, другий вихід ПЗП, вихід суматора і вихід схеми віднімання з'єднані відповідно з входами трьох ключів, виходи яких з'єднані з п'ятим входом пеленгаторної станції, з яким з'єднаний другий вихід БФЦ.
Текст
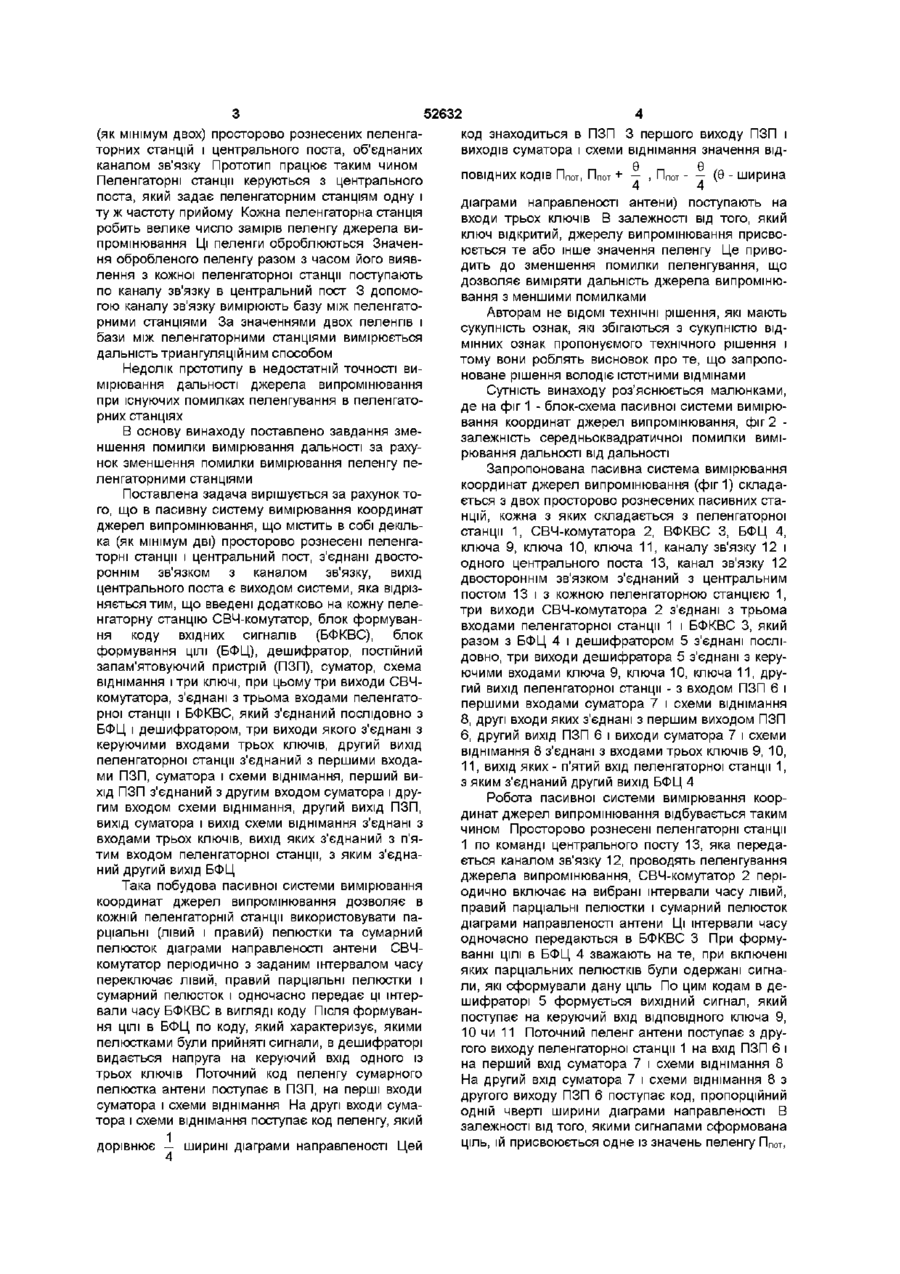
Пасивна система вимірювання координат джерел випромінювання, що містить щонайменше дві просторово рознесені пеленгаторні станції і центральний пост, з'єднані двостороннім зв'язком з каналом зв'язку, вихід центрального поста є виходом системи, яка відрізняється тим, що в неї додатково введені на кожну пеленгаторну станцію НВЧ комутатор, блок формування коду вхідних сигналів (БФКВС), блок формування ЦІЛІ (БФЦ), дешифратор, постійний запам'ятовуючий пристрій (ПЗП), суматор, схема віднімання і три ключі, при цьому три виходи НВЧ комутатора з'єднані ВІДПОВІДНО з трьома входами пеленгаторної станції і трьома входами БФКВС, вихід якого з'єднаний послідовно з БФЦ і з дешифратором, три виходи якого з'єднані ВІДПОВІДНО З керуючими входами трьох ключів, другий вихід пеленгаторної станції з'єднаний з першим входом ПЗП, першим входом суматора і першим входом схеми віднімання, перший вихід ПЗП з'єднаний з другим входом суматора і другим входом схеми віднімання, другий вихід ПЗП, вихід суматора і вихід схеми віднімання з'єднані ВІДПОВІДНО з входами трьох ключів, виходи яких з'єднані з п'ятим входом пеленгаторної станції, з яким з'єднаний другий вихід БФЦ О Винахід відноситься до області пасивної локації, яка здійснює виявлення і вимірювання координат повітряних, наземних і надводних об'єктів, створюючих випромінювання Джерелом випромінювання можуть бути працюючі радіопередавачі об'єктів (пілотажно-навігаційні, локаційні, зв'язку) Методи пасивної локації мають свої специфічні особливості Із-за відсутності інформації про час випромінювання дальність до джерел випромінювання визначається з використанням двох або більше просторово рознесених на деяку відстань (базу) пунктів приймання, з'єднаних каналом зв'язку Приймання прямого сигналу полегшує виявлення і вимірювання координат ЦІЛІ Відсутність передавачів при пасивній локації спрощує апаратуру і підвищує потайність роботи Найбільш ВІДОМІ два способи вимірювання координат джерел випромінювання різнодальномірний (гіперболічний) і триангуляційний (пєленгаційний) Різнодальномірний метод базується на вимірюванні різниці відстаней від джерела випромінювання до пунктів прийому Відомо, ЩО геометричним місцем точок, різниця відстаней яких до двох заданих точок (фокусів) є величина постійна, є гіпербола Місцезнаходження джерела випромі нювання визначається як точка перетину двох гіпербол Для місцезнаходження джерела випромінювання потрібно як мінімум три пункти прийому Триангуляційний метод більш поширений і базується на вимірюванні кутових напрямків на ціль мінімум з двох пунктів прийому, які рознесені в просторі на деяку відстань Місцезнаходження ЦІЛІ визначається як точка перетину двох ЛІНІЙ, кожна з яких виявляється ЛІНІЄЮ положення Помилки визначення дальності залежать від помилок визначення пеленгу і розмірів бази Для зменшення помилки визначення дальності, потрібно зменшувати помилки визначення пеленгу або збільшувати розмір бази Недолік пасивних систем вимірювання координат джерел випромінювання полягає в великих помилках визначення пеленгу і обмежених розмірах бази малих в порівнянні з дальністю при роботі в умовах дальнього тропосферного поширення радіохвиль ("Теоретические основы радиолокации" под ред Я Д Ширмана, М, "Сов радио", 1970) Найбільш близькою по технічній сутності і тому вибраної як прототип заявка ФРГ 3601372, заявлена 18 011986р. надрукована 23 07 1987р MKJG01S5/01 Прототип складається з декількох со (О сч ю 52632 (як мінімум двох) просторово рознесених пеленгаторних станцій і центрального поста, об'єднаних каналом зв'язку Прототип працює таким чином Пеленгаторні станції керуються з центрального поста, який задає пеленгаторним станціям одну і ту ж частоту прийому Кожна пеленгаторна станція робить велике число замірів пеленгу джерела випромінювання Ці пеленги оброблюються Значення обробленого пеленгу разом з часом його виявлення з кожної пеленгаторної станції поступають по каналу зв'язку в центральний пост 3 допомогою каналу зв'язку вимірюють базу між пеленгаторними станціями За значеннями двох пеленгів і бази між пеленгаторними станціями вимірюється дальність триангуляційним способом Недолік прототипу в недостатній точності вимірювання дальності джерела випромінювання при існуючих помилках пеленгування в пеленгаторних станціях В основу винаходу поставлено завдання зменшення помилки вимірювання дальності за рахунок зменшення помилки вимірювання пеленгу пеленгаторними станціями Поставлена задача вирішується за рахунок того, що в пасивну систему вимірювання координат джерел випромінювання, що містить в собі декілька (як мінімум дві) просторово рознесені пеленгаторні станції і центральний пост, з'єднані двостороннім зв'язком з каналом зв'язку, вихід центрального поста є виходом системи, яка відрізняється тим, що введені додатково на кожну пеленгаторну станцію СВЧ-комутатор, блок формування коду вхідних сигналів (БФКВС), блок формування ЦІЛІ (БФЦ), дешифратор, постійний запам'ятовуючий пристрій (ПЗП), суматор, схема віднімання і три ключі, при цьому три виходи СВЧкомутатора, з'єднані з трьома входами пеленгаторної станції і БФКВС, який з'єднаний послідовно з БФЦ і дешифратором, три виходи якого з'єднані з керуючими входами трьох ключів, другий вихід пеленгаторної станції з'єднаний з першими входами ПЗП, суматора і схеми віднімання, перший вихід ПЗП з'єднаний з другим входом суматора і другим входом схеми віднімання, другий вихід ПЗП, вихід суматора і вихід схеми віднімання з'єднані з входами трьох ключів, вихід яких з'єднаний з п'ятим входом пеленгаторної станції, з яким з'єднаний другий вихід БФЦ код знаходиться в ПЗП 3 першого виходу ПЗП і виходів суматора і схеми віднімання значення ВІДповідних кодів Ппот, Ппот + — , П пот (6 - ширина 4 4 діаграми направленості антени) поступають на входи трьох ключів В залежності від того, який ключ відкритий, джерелу випромінювання присвоюється те або інше значення пеленгу Це приводить до зменшення помилки пеленгування, що дозволяє виміряти дальність джерела випромінювання з меншими помилками Авторам не ВІДОМІ технічні рішення, які мають сукупність ознак, які збігаються з сукупністю ВІДМІННИХ ознак пропонуємого технічного рішення і тому вони роблять висновок про те, що запропоноване рішення володіє істотними відмінами Сутність винаходу роз'яснюється малюнками, де на фіг 1 - блок-схема пасивної системи вимірювання координат джерел випромінювання, фіг 2 залежність середньоквадратичної помилки вимірювання дальності від дальності Запропонована пасивна система вимірювання координат джерел випромінювання (фиг 1) складається з двох просторово рознесених пасивних станцій, кожна з яких складається з пеленгаторної станції 1, СВЧ-комутатора 2, ВФКВС З, БФЦ 4, ключа 9, ключа 10, ключа 11, каналу зв'язку 12 і одного центрального поста 13, канал зв'язку 12 двостороннім зв'язком з'єднаний з центральним постом 13 і з кожною пеленгаторною станцією 1, три виходи СВЧ-комутатора 2 з'єднані з трьома входами пеленгаторної станції 1 і БФКВС 3, який разом з БФЦ 4 і дешифратором 5 з'єднані послідовно, три виходи дешифратора 5 з'єднані з керуючими входами ключа 9, ключа 10, ключа 11, другий вихід пеленгаторної станції - з входом ПЗП 6 і першими входами суматора 7 і схеми віднімання 8, другі входи яких з'єднані з першим виходом ПЗП 6, другий вихід ПЗП 6 і виходи суматора 7 і схеми віднімання 8 з'єднані з входами трьох ключів 9, 10, 11, вихід яких - п'ятий вхід пеленгаторної станції 1, з яким з'єднаний другий вихід БФЦ 4 Така побудова пасивної системи вимірювання координат джерел випромінювання дозволяє в кожній пеленгаторній станції використовувати парціальні (лівий І правий) пелюстки та сумарний пелюсток діаграми направленості антени СВЧкомутатор періодично з заданим інтервалом часу переключає лівий, правий парціальні пелюстки і сумарний пелюсток і одночасно передає ці інтервали часу БФКВС в вигляді коду Після формування ЦІЛІ в БФЦ по коду, який характеризує, якими пелюстками були прийняті сигнали, в дешифраторі видається напруга на керуючий вхід одного із трьох ключів Поточний код пеленгу сумарного пелюстка антени поступає в ПЗП, на перші входи суматора і схеми віднімання На другі входи суматора і схеми віднімання поступає код пеленгу, який Робота пасивної системи вимірювання координат джерел випромінювання відбувається таким чином Просторово рознесені пеленгаторні станції 1 по команді центрального посту 13, яка передається каналом зв'язку 12, проводять пеленгування джерела випромінювання, СВЧ-комутатор 2 періодично включає на вибрані інтервали часу лівий, правий парціальні пелюстки і сумарний пелюсток діаграми направленості антени Ці інтервали часу одночасно передаються в БФКВС 3 При формуванні ЦІЛІ в БФЦ 4 зважають на те, при включені яких парціальних пелюстків були одержані сигнали, які сформували дану ціль По цим кодам в дешифраторі 5 формується вихідний сигнал, який поступає на керуючий вхід ВІДПОВІДНОГО ключа 9, 10 чи 11 Поточний пеленг антени поступає з другого виходу пеленгаторної станції 1 на вхід ПЗП 6 і на перший вхід суматора 7 і схеми віднімання 8 На другий вхід суматора 7 і схеми віднімання 8 з другого виходу ПЗП 6 поступає код, пропорційний одній чверті ширини діаграми направленості В залежності від того, якими сигналами сформована дорівнює — ширині діаграми направленості Цей ЦІЛЬ, ІЙ ПРИСВОЮЄТЬСЯ ОДНЄ ІЗ ЗНачеНЬ П е л е н г у Ппот, 52632 яка подається на керуючі елементи Керуючими Це значення пеленгу ЦІЛІ ПОПг + — елементами в СВЧ-комутаторі передбачається 4 4 використовувати р-i-n діоди типу 2А546А-5, які ступає в відповідну пеленгаторну станцію 1, і по включаються в два плеча комутатора величині бази між ними в центральному посту 13 Результати статистичного моделювання довевирішується триангуляційна задача Дальність до ли ефективність запропонованої пасивної системи джерела випромінювання по каналу зв'язку 12 повимірювання координат джерел випромінювання ступає в відповідну пеленгаторну станцію 1 Робота пасивної системи моделювалась в умовах Пеленгаторна станція 1 аналогічна наведеним дальнього тропосферного поширення радіохвиль в книзі Кукес И С и др, "Основи радиопеленгации", ("Дальнєє тропосферное распространение УКВ" М , "Сов радио", 1964 Канал зв'язку 12 аналогічпод ред Введенского, М , "Сов радио", 1965) ний наведеному в книзі Немировський и др "СисРезультати статистичного моделювання притемы связи и радиореленые линии", М , Связь, ведені на фіг 2 Крива 1 відповідає роботі системи 1980 БФКВС 3, БФЦ 4, дешифратор 5, ПЗП 6, супрототипу, а крива 2 відповідає роботі запропономатор 7, схема віднімання 8, ключі 9, 10, 11, ваної пасивної системи в аналогічних умовах з центральний пост 13 це дискретні блоки, які реаліпрототипом Як видно з приведених даних, запрозовані на інтегральних схемах серії 530, 533, 1500 понована система дозволяє зменшити середньоі інших СВЧ-комутатор 2 реалізований по схемі квадратичні помилки вимірювання дальності в шестиполюсника з стрибкоподібними змінними 1,6 2 рази в залежності від дальності параметрами в залежності від полярності напруги, 150 250 Фіг 2 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)236-47-24
ДивитисяДодаткова інформація
Назва патенту англійськоюPassive system for measuring coordinates of a radio radiation source
Автори англійськоюYena Hryhorii Оlекsаndrоvусh, Chernysh Stanislav Kostiantynovych
Назва патенту російськоюПассивная система для измерения координат источника радиоизлучения
Автори російськоюЕна Григорий Александрович, Черныш Станислав Константинович
МПК / Мітки
МПК: G01S 5/04
Мітки: пасивна, система, координат, випромінювання, вимірювання, джерел
Код посилання
<a href="https://ua.patents.su/3-52632-pasivna-sistema-vimiryuvannya-koordinat-dzherel-viprominyuvannya.html" target="_blank" rel="follow" title="База патентів України">Пасивна система вимірювання координат джерел випромінювання</a>
Пасивна система вимірювання координат джерел випромінювання
Номер патенту: 43433
Опубліковано: 17.12.2001
Автор: Черниш Станіслав Костянтинович
МПК: G01S 5/06
Мітки: система, вимірювання, координат, джерел, випромінювання, пасивна
Формула / Реферат:
Пасивна система вимірювання координат джерел випромінювання, що містить в собі декілька, як мінімум дві, просторово рознесені пеленгаторні станції і центральний пост, з'єднані двостороннім зв'язком з каналом зв'язку, вихід центрального поста є виходом системи, яка відрізняється тим, що в неї введені додатково на кожну пеленгаторну станцію лічильник, накопичуючий суматор, подільник, дешифратор, постійний запам'ятовуючий пристрій (ПЗП), схема...
Пасивна система вимірювання координат джерел випромінювання
Номер патенту: 41466
Опубліковано: 17.09.2001
Автор: Черниш Станіслав Костянтинович
Мітки: випромінювання, координат, пасивна, вимірювання, система, джерел
Формула / Реферат:
Пасивна система вимірювання координат джерел випромінювання, що містить в собі декілька (як мінімум дві) просторово рознесених пеленгаторних станцій і центральний пост, з'єднаних двостороннім каналом зв'язку, вихід центрального поста є виходом системи, яка відрізняється тим, що введені додатково на кожну пеленгаторну станцію система єдиного часу (ЄЧ) і блок вимірювання періоду обертання антени (ВПОА), а в центральний пост введені додатково...
Пасивна станція вимірювання координат джерел випромінювання
Номер патенту: 37949
Опубліковано: 15.05.2001
Автор: Черниш Станіслав Костянтинович
Мітки: вимірювання, станція, пасивна, джерел, координат, випромінювання
Формула / Реферат:
Пасивна станція вимірювання координат джерел випромінювання містить в собі пеленгаторну станцію, блок обробки пеленгів прямого галсу (БОППГ), блок обробки пеленгів оберненого галсу (БОПОГ), блок визначення швидкості зміни пеленга (БВШЗП) і блок визначення дальності, які розміщені на рухомому носієві, перший і другий вихід пеленгаторної станції з'єднаний з входами БОППГ і БОПОГ, перший вихід якого е першим виходом пасивної станції, перший...
Пасивна станція вимірювання координат джерел випромінювання
Номер патенту: 52649
Опубліковано: 15.01.2003
Автор: Черниш Станіслав Костянтинович
МПК: G01S 5/06
Мітки: джерел, випромінювання, вимірювання, станція, пасивна, координат
Формула / Реферат:
Пасивна станція вимірювання координат джерел випромінювання, що містить пеленгаторну станцію, блок обробки пеленгів прямого галсу (БОППГ) і блок обробки пеленгів оберненого галсу (БОПОГ), які розміщені на рухомому носієві, перший вихід пеленгаторної станції з'єднаний з входом БОППГ, яка відрізняється тим, що в неї додатково введені блок визначення швидкості зміни пеленга (БВШЗП), блок визначення дальності, схема порівняння, оперативний...
Електромагнітна система визначення координат інженерних комунікацій
Номер патенту: 45377
Опубліковано: 15.04.2002
Автори: Драбич Петро Петрович, Драбич Олег Петрович, Яворський Ігор Миколайович
МПК: G01V 3/10, G01R 33/00
Мітки: комунікацій, система, інженерних, електромагнітна, координат, визначення
Формула / Реферат:
Електромагнітна система визначення координат інженерних комунікацій, яка складається з ближнього, середнього і дальнього відносно осі комунікації паралельно розміщених на одній осі ідентичних магнітоприймачів, першого, другого і третього пристроїв віднімання, першого і другого вузькосмугових підсилювачів, навушних телефонів, аналого-цифрового перетворювача і цифрового індикатора, в якій вихід ближнього магнітоприймача з'єднаний з першим...
Попередній патент: Фунгіцидна суміш та спосіб боротьби з шкідливими грибками
Наступний патент: Пасивна станція вимірювання координат джерел випромінювання
Випадковий патент: Спосіб прогнозування цирозу печінки методом добового моніторування артеріального тиску