Спосіб виділення границь об’єкта на зображенні
Номер патенту: 58473
Опубліковано: 11.04.2011
Автори: Федоренко Любов Володимирівна, Білан Степан Миколайович, Білан Миколай Миколайович, Шевченко Ольга Вікторівна, Горейко Сергій Миколайович
Формула / Реферат
Спосіб виділення границь об'єкта на зображенні, що полягає у проектуванні оброблюваного зображення на матрицю фоточутливих елементів, перетворюють інтенсивності кожної точки зображення у код, визначають значення коду, що відповідає фоновому рівню, визначають рівень перевищеного значення фону і порівнюють отримані значення між сусідніми клітинами, який відрізняється тим, що для кожної клітини матриці фоточутливих елементів формують околицю із сусідніх клітин цієї матриці, визначають значення інтенсивностей у кожній клітині, визначають середнє значення інтенсивності для кожної клітини та її околиці, порівнюють отримане середнє значення зі значенням контрольної клітини і, якщо значення інтенсивності контрольної клітини більше отриманого середнього значення околиці, відносять її до клітини, що належить границі багатоградаційного зображення, якщо значення інтенсивності контрольної клітини менше отриманого середнього значення околиці, то інтенсивність даної клітини зменшують до значення фонової інтенсивності.
Текст
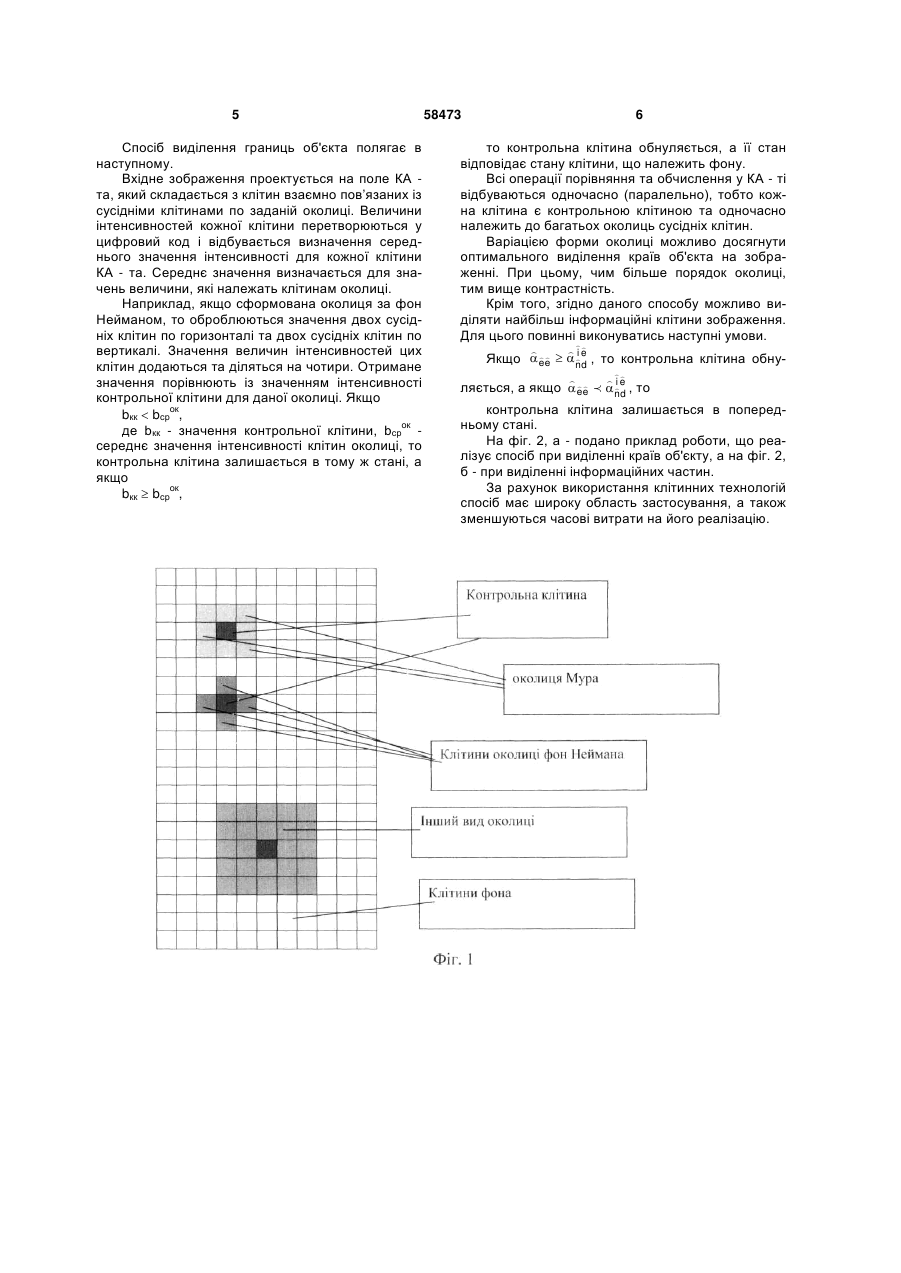
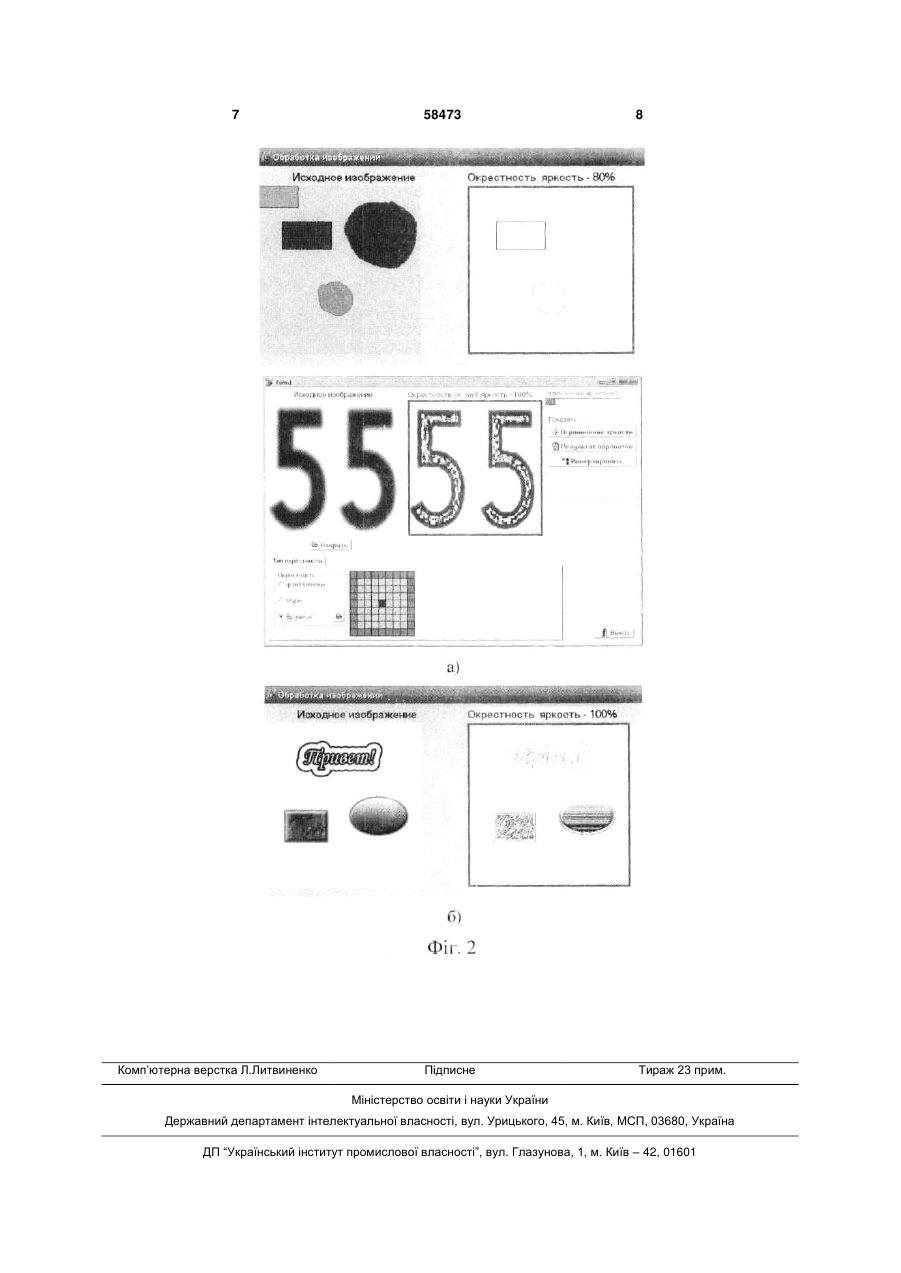
Спосіб виділення границь об'єкта на зображенні, що полягає у проектуванні оброблюваного зображення на матрицю фоточутливих елементів, перетворюють інтенсивності кожної точки зображення у код, визначають значення коду, що відповідає фоновому рівню, визначають рівень пере 3 елементарних точок, j - а точка є середньою, а розташування стовпців віконного оператора збігаються по напрямку з нормаллю до j - ї точки кривої, виконують обчислення перепаду яскравості, послідовно переміщуючи віконний фільтр по нормалі від нижньої границі зони пошуку до верхньої, знаходять максимальне значення перепаду яскравості на даному інтервалі пошуку і фіксують при цьому координати центра вікна відповідно до яких виконують маркування точки максимального перепаду на інтервалі пошуку, при виникненні на інтервалі пошуку декількох однакових максимальних значень перепаду маркують точку розташовану ближче до апріорної кривої, при виникненні двох точок, що рівновіддалені від апріорної кривої та мають однакове максимальне значення перепаду маркують точку, яка ближча до попередньої маркованої точки, описану вище процедуру застосовують для всіх інших точок кривої й одержують на зображенні марковані точки, що відповідають уточненій границі об'єкта, після чого уточнена границя згладжується, використовують оператор, що містить один рядок з елементами заданого значення, у якого координати 2к+1 елементів такі, що в сукупності повторюють форму фрагмента кривої, а для обчислення перепаду яскравості використовують різниці отриманих значень згорток оператора з зображенням, отримані на попередніх і наступних кроках, значення елементів вектора - рядка вибирають однаково, а замість обчислення згортки на кожному кроці виконують медіанну фільтрацію параметрів точок зображення координати яких збігаються з координатами вектора - рядка, вагу елементів вектора - рядка оператора вибирають однаковою, а замість обчислення згортки на кожному кроці виконують усереднення параметрів точок зображення, координати яких збігаються з координатами вектора - рядка з відбраковуванням «перешкоджаючих» значень. Недоліками даного способу є низька швидкодія за рахунок послідовного формування кривої перепаду яскравості та застосування віконного фільтру з послідовним пересуванням віконного фільтру по нормалі, а також низька точність за рахунок визначення максимальних перепадів, що може призвести до хибних результатів. Найбільшим близьким за змістом до заявляємого є спосіб, що реалізований у пристрої (Патент України №17980, БИ №5, від 31.10.97 p., G06K9136), який полягає у тому, що зображення проектують на матрицю фоточутливих елементів, площа кожного з яких визначає одиничний дискрет зображення, перетворюють оптичні сигнали у рівноваговий код, виділяють границі між окремими пікселями з різною інтенсивністю освітленості і переданні цим границям відповідних пріоритетних параметрів, розділяють код на знаковий та цифровий розряди, фіксують виділений контур, задають рівень контрастності, коди з рівними значеннями порівнюють та додають за допомогою суматора, виділення границь відбувається за наступною моделлю , 1 якщо У см Ук Q 0, якщо У см Ук 58473 4 де Q - сигнал стану на виході суматора; У см - значення на виході суматора; У к - еталонне значення рівня контрастності заданого контуру. Недоліком даного способу є вузька область застосування, а також низька точність, оскільки спосіб не дозволяє виділяти інформативні елементи зображення та не обнуляє елементи, які мають яскравість більшу за фонову і не належать контуру. Крім того, для реалізації способу застосовується додаткове клітинне середовище, в якому формуються виділені краї зображення за контрастністю. Спосіб має великий час реалізації за рахунок застосування рівновагового кодування. В основу корисної моделі поставлена задача розширення області застосування, підвищення точності та зниження часу на реалізацію способу, що заявляється, полягає в можливості не тільки виділяти границі багатоградаційних зображень, а й в можливості видаляти зайві неінформативні елементи та виділяти тільки мінімально інформативний базис елементів зображення, які не змінюють його смислового опису. Підвищення точності досягається за рахунок виділення більш інформативних елементів контуру зображення, шляхом підбору форми околиці клітин та оптимального фонового порогу значення яскравості. Зменшення часу реалізації способу полягає у застосуванні клітинних автоматів, в яких операції виділення інформативних елементів виконуються за один такт. Тобто не застосовується сканування усього зображення, а усі елементи зображення по інтенсивності аналізуються одночасно. Поставлена задача вирішується тим, що спосіб виділення границь об'єкта на зображенні, який полягає у проектуванні оброблюваного зображення на матрицю фоточутливих елементів, перетворюють інтенсивності кожної точки зображення у код, визначають значення коду, що відповідає фоновому рівню, визначають рівень перевищеного значення фону між сусідніми клітинами, для кожної клітини матриці фоточутливих елементів формують околицю із сусідніх клітин цієї матриці, визначають значення інтенсивності у кожній клітині, визначають середнє значення інтенсивності для кожної клітини та її околиці, порівнюють отримане середнє значення зі значенням контрольної клітини і, якщо значення інтенсивності контрольної клітини більше отриманого середнього значення околиці, відносять її до клітини, що належить границі багатоградаційного зображення, якщо значення інтенсивності контрольної клітини менше отриманого середнього значення околиці, то інтенсивність даної клітини зменшують до значення фонової інтенсивності. На фігурі 1 подано графічне пояснення способу, а на фіг. 2 - приклад функціонування програми, що реалізує спосіб. На фіг. 1 зображено поле клітинного автомату (КА) з чотирикутною мозаїкою клітин. На полі КА відображено декілька варіантів сформованої околиці навколо контрольної клітини. 5 Спосіб виділення границь об'єкта полягає в наступному. Вхідне зображення проектується на поле КА та, який складається з клітин взаємно пов’язаних із сусідніми клітинами по заданій околиці. Величини інтенсивностей кожної клітини перетворюються у цифровий код і відбувається визначення середнього значення інтенсивності для кожної клітини КА - та. Середнє значення визначається для значень величини, які належать клітинам околиці. Наприклад, якщо сформована околиця за фон Нейманом, то оброблюються значення двох сусідніх клітин по горизонталі та двох сусідніх клітин по вертикалі. Значення величин інтенсивностей цих клітин додаються та діляться на чотири. Отримане значення порівнюють із значенням інтенсивності контрольної клітини для даної околиці. Якщо bкк bсрок, де bкк - значення контрольної клітини, bсрок середнє значення інтенсивності клітин околиці, то контрольна клітина залишається в тому ж стані, а якщо bкк bсрок, 58473 6 то контрольна клітина обнуляється, а її стан відповідає стану клітини, що належить фону. Всі операції порівняння та обчислення у КА - ті відбуваються одночасно (паралельно), тобто кожна клітина є контрольною клітиною та одночасно належить до багатьох околиць сусідніх клітин. Варіацією форми околиці можливо досягнути оптимального виділення країв об'єкта на зображенні. При цьому, чим більше порядок околиці, тим вище контрастність. Крім того, згідно даного способу можливо виділяти найбільш інформаційні клітини зображення. Для цього повинні виконуватись наступні умови. i Якщо ее ne , то контрольна клітина обнуd ie ляється, а якщо ее nd , то контрольна клітина залишається в попередньому стані. На фіг. 2, а - подано приклад роботи, що реалізує спосіб при виділенні країв об'єкту, а на фіг. 2, б - при виділенні інформаційних частин. За рахунок використання клітинних технологій спосіб має широку область застосування, а також зменшуються часові витрати на його реалізацію. 7 Комп’ютерна верстка Л.Литвиненко 58473 8 Підписне Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюObject boundary detection on the image
Автори англійськоюBilan Stepan Mykolaiovych, Bilan Mykola Mykolaiovych, Shevchenko Olha Viktorivna, Horeiko Serhii Mykolaiovych, Fedorenko Liubov Volodymyrivna
Назва патенту російськоюСпособ выделения границ объекта на изображении
Автори російськоюБилан Степан Николаевич, Билан Николай Николаевич, Шевченко Ольга Викторовна, Горейко Сергей Николаевич, Федоренко Любовь Владимировна
МПК / Мітки
МПК: G06K 9/64
Мітки: зображенні, спосіб, об'єкта, границь, виділення
Код посилання
<a href="https://ua.patents.su/4-58473-sposib-vidilennya-granic-obehkta-na-zobrazhenni.html" target="_blank" rel="follow" title="База патентів України">Спосіб виділення границь об’єкта на зображенні</a>
Спосіб виділення границь об’єкта на зображенні
Номер патенту: 70489
Опубліковано: 15.10.2004
Автори: Харченко Олексій Вікторович, Криворучко Ігор Андрійович, Бойко Валерій Володимирович, Крахмалова Олена Олегівна
МПК: G06K 9/64
Мітки: спосіб, зображенні, виділення, об'єкта, границь
Формула / Реферат:
1. Спосіб виділення границь об'єкта на зображенні, що включає вибір зони пошуку максимального перепаду яскравості і напрямки пошуку, обчислення максимального значення перепаду яскравості на кожному інтервалі пошуку, згладжування і маркування отриманої границі, який відрізняється тим, що границю, яку виділяють, описують безупинною кривою, використовуючи апріорні дані про форму границі об'єкта зображення, що спостерігається, а як зону пошуку...
Спосіб субпікселної локалізації краю об`єкта на зображенні
Номер патенту: 38796
Опубліковано: 26.01.2009
Автор: Білинський Йосип Йосипович
МПК: G06K 9/36
Мітки: локалізації, спосіб, зображенні, краю, об'єкта, субпікселної
Формула / Реферат:
Спосіб субпікселної локалізації краю об'єкта на зображенні, що включає реєстрацію зображення об'єкта в запам'ятовуючому пристрої, встановлення прямокутних областей зображення для подальшого визначення границь об'єкта, визначення прямокутної області для пошуку країв, використання низькочастотної фільтрації і визначення номерів пікселів, між якими знаходять спільну точку до та після фільтрації, яка є координатою краю об'єкта, який відрізняється...
Спосіб знаходження людських облич на зображенні

Номер патенту: 53412
Опубліковано: 11.10.2010
Автори: Кулик Анатолій Ярославович, Маслій Роман Васильович
МПК: G06K 9/62
Мітки: людських, облич, знаходження, спосіб, зображенні
Формула / Реферат:
Спосіб знаходження людських облич на зображенні, в якому формують базу зображень фронтальних облич та базу зображень, на яких відсутні обличчя, з яких формують навчальні та верифікаційні набори позитивних та негативних прикладів, тренують ансамбль сильних класифікаторів, додають до ансамблю сильні класифікатори до тих пір, поки не буде досягнуто заданих значень помилки першого роду та рівня детекції; для ансамблю; тренують сильні...
Спосіб виявлення облич людей на зображенні
Номер патенту: 54760
Опубліковано: 25.11.2010
Автори: Маслій Роман Васильович, Кулик Анатолій Ярославович, Білошкурський Сергій Степанович
МПК: G06K 9/62
Мітки: зображенні, спосіб, виявлення, облич, людей
Формула / Реферат:
Спосіб виявлення облич людей на зображенні, в якому формують базу зображень облич фронтального вигляду та базу зображень, на яких відсутні обличчя, з яких формують навчальні та верифікаційні набори позитивних та негативних прикладів, тренують каскад сильних класифікаторів, додають до каскаду сильні класифікатори до тих пір, поки не буде досягнуто заданих значень помилки першого роду та рівня детекції для каскаду; тренують сильний...
Спосіб виділення контуру зображення
Номер патенту: 29418
Опубліковано: 10.01.2008
Автори: Юкиш Сергій Васильович, Білинський Йосип Йосипович
МПК: G06K 9/64
Мітки: виділення, спосіб, контуру, зображення
Формула / Реферат:
Спосіб виділення контуру, який включає операцію згладжування за допомогою згортання з гауссіаном і обчислення градієнта зображення в вертикальному та горизонтальному напрямках за допомогою одного із операторів першої похідної, який відрізняється тим, що в ньому повторно виконують операцію згладжування з наступним виділенням точок перетину примежових кривих вхідного та зображення, отриманого в результаті повторного згладжування, для усунення...
Попередній патент: Спосіб підвищення функціональних можливостей дихальної системи організму людини
Наступний патент: Стенд для випробування залізобетонних плит, підсилених в розтягненій зоні під навантаженням
Випадковий патент: Очисник головок коренеплодів