Спосіб виділення границь об’єкта на зображенні
Номер патенту: 70489
Опубліковано: 15.10.2004
Автори: Харченко Олексій Вікторович, Криворучко Ігор Андрійович, Бойко Валерій Володимирович, Крахмалова Олена Олегівна
Формула / Реферат
1. Спосіб виділення границь об'єкта на зображенні, що включає вибір зони пошуку максимального перепаду яскравості і напрямки пошуку, обчислення максимального значення перепаду яскравості на кожному інтервалі пошуку, згладжування і маркування отриманої границі, який відрізняється тим, що границю, яку виділяють, описують безупинною кривою, використовуючи апріорні дані про форму границі об'єкта зображення, що спостерігається, а як зону пошуку вибирають частину даної кривої, для обчислення перепаду яскравості застосовують віконний оператор, у якого координати 2k+1 елементів кожної з рядків такі, що в сукупності повторюють форму фрагмента кривої, який складає з 2k+1 елементарних точок, j-a точка є середньою, а розташування стовпців віконного оператора збігається по напрямку з нормаллю до j-ї точки кривої, виконують обчислення перепаду яскравості, послідовно переміщаючи віконний фільтр по нормалі від нижньої границі зони пошуку до верхньої, знаходять максимальне значення перепаду яскравості на даному інтервалі пошуку і фіксують при цьому координати центра вікна, відповідно до яких виконують маркування точки максимального перепаду на інтервалі пошуку, при виникненні на інтервалі пошуку декількох однакових максимальних значень перепаду маркують точку, розташовану ближче до апріорної кривої, при виникненні двох точок, що рівновіддалені від апріорної кривої та мають однакове максимальне значення перепаду маркують точку, яка ближча до попередньої маркованої точки, описану вище процедуру застосовують для всіх інших точок кривої й одержують на зображенні марковані точки, що відповідають уточненій границі об'єкта, після чого уточнена границя згладжується.
2. Спосіб за п. 1, який відрізняється тим, що використовують оператор, що містить один рядок з елементами заданого значення, у якого координати 2k+1 елементів такі, що в сукупності повторюють форму фрагмента кривої, а для обчислення перепаду яскравості використовують різниці отриманих значень згорток оператора з зображенням, отримані на попередніх і наступних кроках.
3. Спосіб за п. 2, який відрізняється тим, що значення елементів вектора-рядка вибирають однаковою, а замість обчислення згортки на кожному кроці виконують медіанну фільтрацію параметрів точок зображення, координати яких збігаються з координатами вектора-рядка.
4. Спосіб за п. 2, який відрізняється тим, що вагу елементів вектора-рядка оператора вибирають однаковою, а замість обчислення згортки на кожному кроці виконують усереднення параметрів точок зображення, координати яких збігаються з координатами вектора-рядка з відбраковуванням «перешкоджаючих» значень (цензурування, вінзорування, усікання і т.д.).
Текст
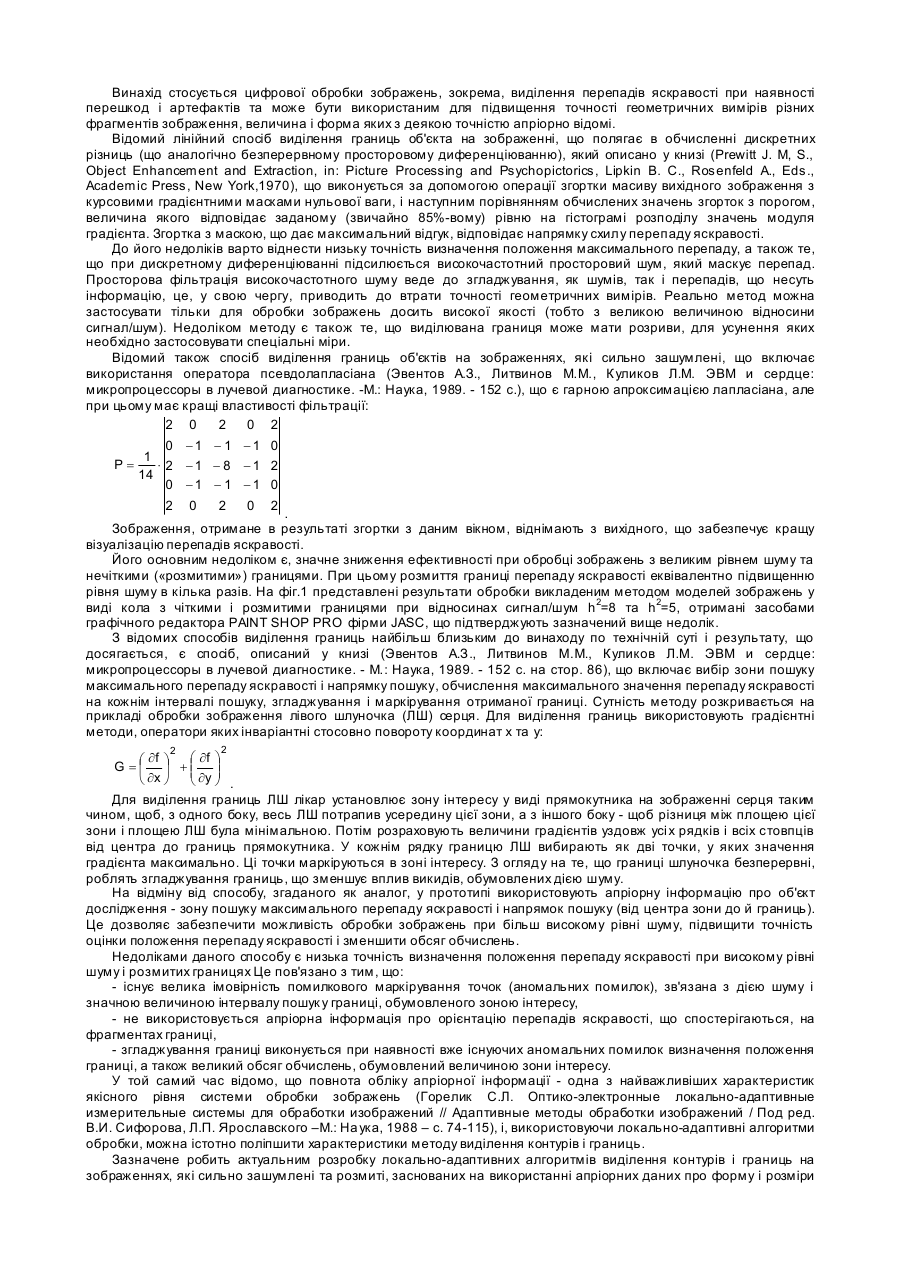
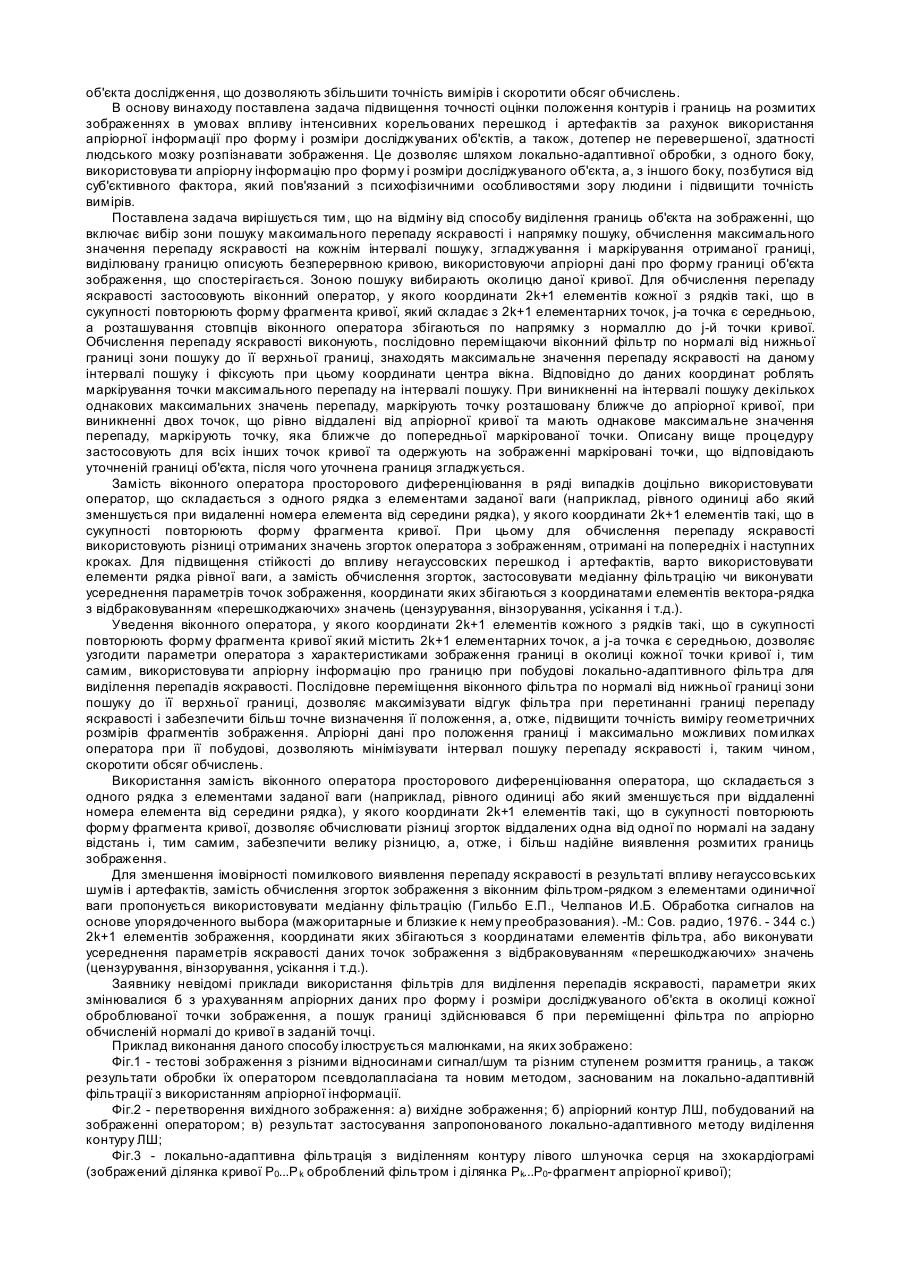
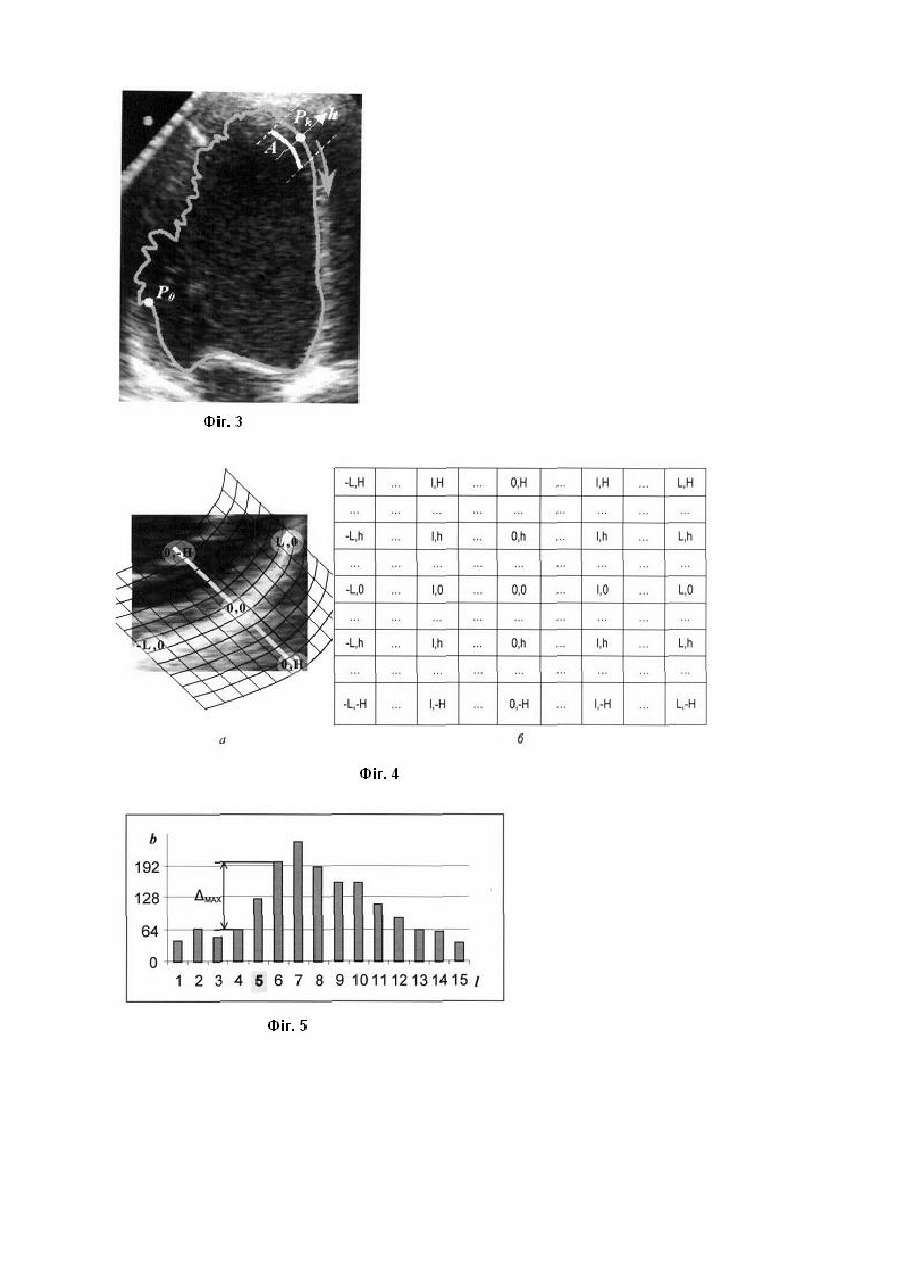
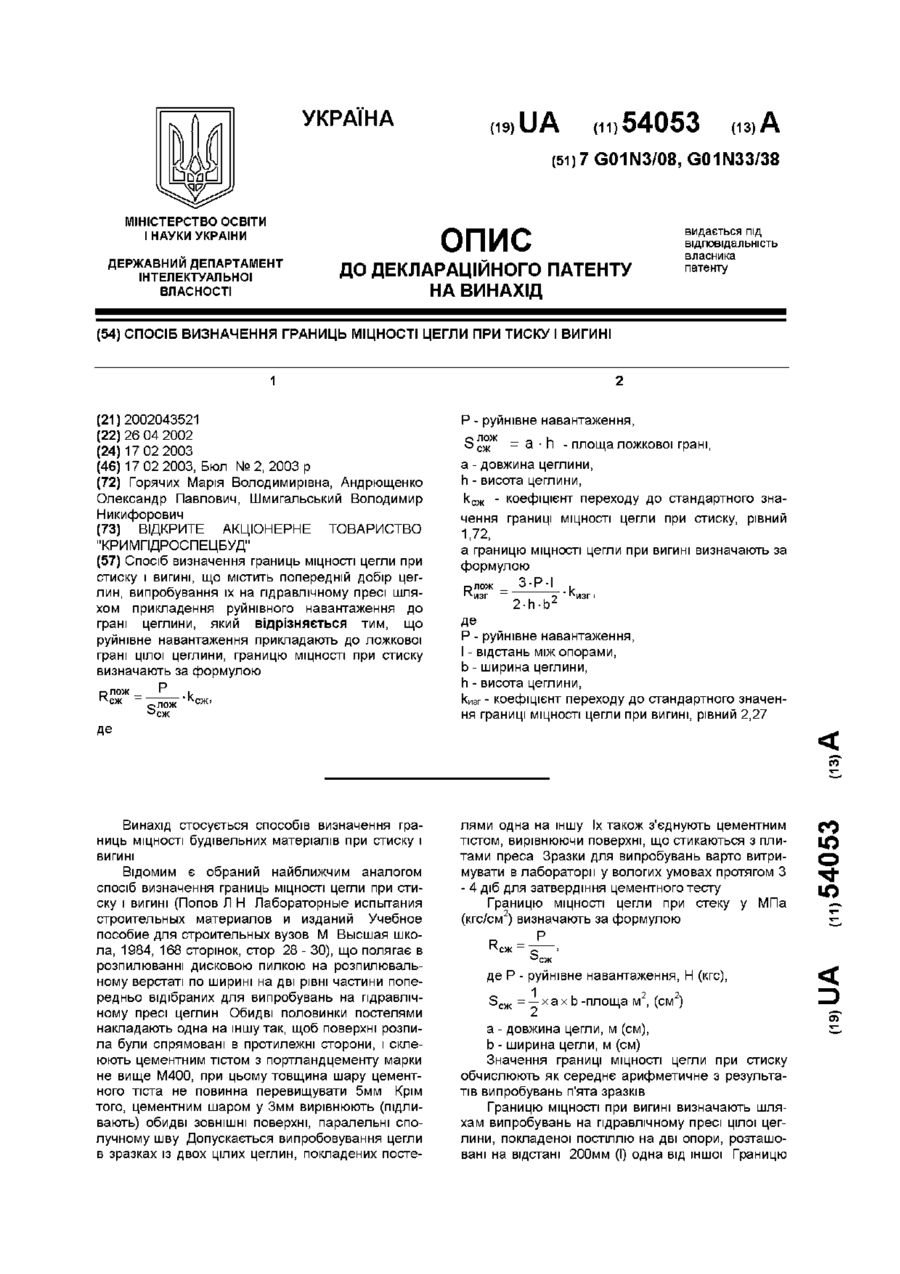
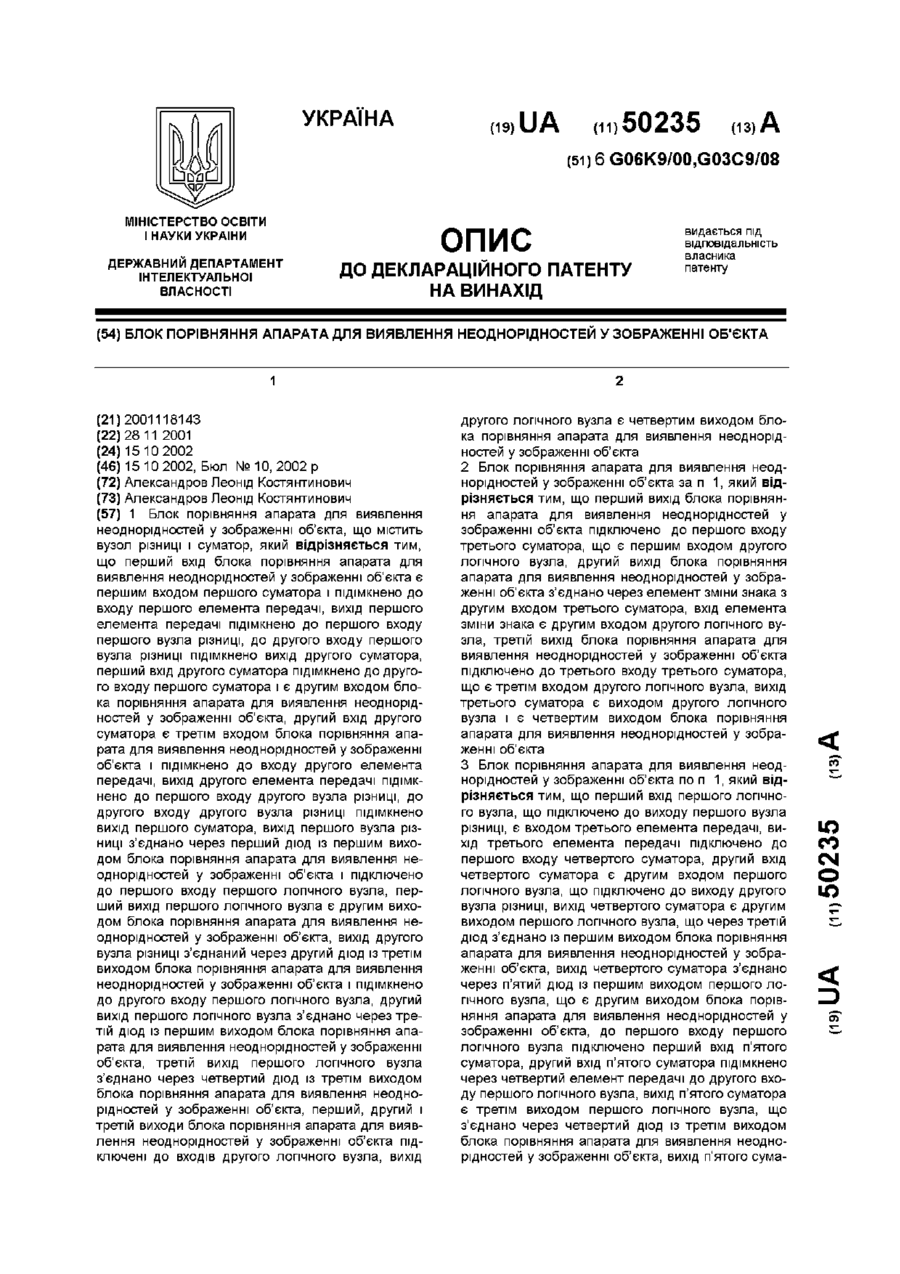
Винахід стосується цифрової обробки зображень, зокрема, виділення перепадів яскравості при наявності перешкод і артефактів та може бути використаним для підвищення точності геометричних вимірів різних фрагментів зображення, величина і форма яких з деякою точністю апріорно відомі. Відомий лінійний спосіб виділення границь об'єкта на зображенні, що полягає в обчисленні дискретних різниць (що аналогічно безперервному просторовому диференціюванню), який описано у книзі (Prewitt J. М, S., Object Enhancement and Extraction, in: Picture Processing and Psychopictorics, Lipkin В. С., Rosenfeld A., Eds., Academic Press, New York,1970), що виконується за допомогою операції згортки масиву вихідного зображення з курсовими градієнтними масками нульової ваги, і наступним порівнянням обчислених значень згорток з порогом, величина якого відповідає заданому (звичайно 85%-вому) рівню на гістограмі розподілу значень модуля градієнта. Згортка з маскою, що дає максимальний відгук, відповідає напрямку схилу перепаду яскравості. До його недоліків варто віднести низьку точність визначення положення максимального перепаду, а також те, що при дискретному диференціюванні підсилюється високочастотний просторовий шум, який маскує перепад. Просторова фільтрація високочастотного шуму веде до згладжування, як шумів, так і перепадів, що несуть інформацію, це, у свою чергу, приводить до втрати точності геометричних вимірів. Реально метод можна застосувати тільки для обробки зображень досить високої якості (тобто з великою величиною відносини сигнал/шум). Недоліком методу є також те, що виділювана границя може мати розриви, для усунення яких необхідно застосовувати спеціальні міри. Відомий також спосіб виділення границь об'єктів на зображеннях, які сильно зашумлені, що включає використання оператора псевдолапласіана (Эвентов А.З., Литвинов М.М., Куликов Л.М. ЭВМ и сердце: микропроцессоры в лучевой диагностике. -М.: Наука, 1989. - 152 с.), що є гарною апроксимацією лапласіана, але при цьому має кращі властивості фільтрації: 2 0 2 0 2 0 -1 - 1 -1 0 1 P= × 2 -1 - 8 -1 2 14 0 -1 - 1 -1 0 2 0 2 0 2 . Зображення, отримане в результаті згортки з даним вікном, віднімають з вихідного, що забезпечує кращу візуалізацію перепадів яскравості. Його основним недоліком є, значне зниження ефективності при обробці зображень з великим рівнем шуму та нечіткими («розмитими») границями. При цьому розмиття границі перепаду яскравості еквівалентно підвищенню рівня шуму в кілька разів. На фіг.1 представлені результати обробки викладеним методом моделей зображень у виді кола з чіткими і розмитими границями при відносинах сигнал/шум h 2=8 та h2=5, отримані засобами графічного редактора PAINT SHOP PRO фірми JASC, що підтверджують зазначений вище недолік. З відомих способів виділення границь найбільш близьким до винаходу по технічній суті і результату, що досягається, є спосіб, описаний у книзі (Эвентов А.З., Литвинов М.М., Куликов Л.М. ЭВМ и сердце: микропроцессоры в лучевой диагностике. - М.: Наука, 1989. - 152 с. на стор. 86), що включає вибір зони пошуку максимального перепаду яскравості і напрямку пошуку, обчислення максимального значення перепаду яскравості на кожнім інтервалі пошуку, згладжування і маркірування отриманої границі. Сутність методу розкривається на прикладі обробки зображення лівого шлуночка (ЛШ) серця. Для виділення границь використовують градієнтні методи, оператори яких інваріантні стосовно повороту координат х та у: 2 2 æ ¶f ö æ ¶f ö G =ç ÷ +ç ÷ ç ¶y ÷ è ¶x ø è ø . Для виділення границь ЛШ лікар установлює зону інтересу у виді прямокутника на зображенні серця таким чином, щоб, з одного боку, весь ЛШ потрапив усередину цієї зони, а з іншого боку - щоб різниця між площею цієї зони і площею ЛШ була мінімальною. Потім розраховують величини градієнтів уздовж усі х рядків і всіх стовпців від центра до границь прямокутника. У кожнім рядку границю ЛШ вибирають як дві точки, у яких значення градієнта максимально. Ці точки маркіруються в зоні інтересу. З огляду на те, що границі шлуночка безперервні, роблять згладжування границь, що зменшує вплив викидів, обумовлених дією шуму. На відміну від способу, згаданого як аналог, у прототипі використовують апріорну інформацію про об'єкт дослідження - зону пошуку максимального перепаду яскравості і напрямок пошуку (від центра зони до й границь). Це дозволяє забезпечити можливість обробки зображень при більш високому рівні шуму, підвищити точність оцінки положення перепаду яскравості і зменшити обсяг обчислень. Недоліками даного способу є низька точність визначення положення перепаду яскравості при високому рівні шуму і розмитих границях Це пов'язано з тим, що: - існує велика імовірність помилкового маркірування точок (аномальних помилок), зв'язана з дією шуму і значною величиною інтервалу пошук у границі, обумовленого зоною інтересу, - не використовується апріорна інформація про орієнтацію перепадів яскравості, що спостерігаються, на фрагментах границі, - згладжування границі виконується при наявності вже існуючих аномальних помилок визначення положення границі, а також великий обсяг обчислень, обумовлений величиною зони інтересу. У той самий час відомо, що повнота обліку апріорної інформації - одна з найважливіших характеристик якісного рівня системи обробки зображень (Горелик С.Л. Оптико-электронные локально-адаптивные измерительные системы для обработки изображений // Адаптивные методы обработки изображений / Под ред. В.И. Сифорова, Л.П. Ярославского –М.: На ука, 1988 – с. 74-115), і, використовуючи локально-адаптивні алгоритми обробки, можна істотно поліпшити характеристики методу виділення контурів і границь. Зазначене робить актуальним розробку локально-адаптивних алгоритмів виділення контурів і границь на зображеннях, які сильно зашумлені та розмиті, заснованих на використанні апріорних даних про форму і розміри об'єкта дослідження, що дозволяють збільшити точність вимірів і скоротити обсяг обчислень. В основу винаходу поставлена задача підвищення точності оцінки положення контурів і границь на розмитих зображеннях в умовах впливу інтенсивних корельованих перешкод і артефактів за рахунок використання апріорної інформації про форму і розміри досліджуваних об'єктів, а також, дотепер не перевершеної, здатності людського мозку розпізнавати зображення. Це дозволяє шляхом локально-адаптивної обробки, з одного боку, використовува ти апріорну інформацію про форму і розміри досліджуваного об'єкта, а, з іншого боку, позбутися від суб'єктивного фактора, який пов'язаний з психофізичними особливостями зору людини і підвищити точність вимірів. Поставлена задача вирішується тим, що на відміну від способу виділення границь об'єкта на зображенні, що включає вибір зони пошуку максимального перепаду яскравості і напрямку пошуку, обчислення максимального значення перепаду яскравості на кожнім інтервалі пошуку, згладжування і маркірування отриманої границі, виділювану границю описують безперервною кривою, використовуючи апріорні дані про форму границі об'єкта зображення, що спостерігається. Зоною пошуку вибирають околицю даної кривої. Для обчислення перепаду яскравості застосовують віконний оператор, у якого координати 2k+1 елементів кожної з рядків такі, що в сукупності повторюють форму фрагмента кривої, який складає з 2k+1 елементарних точок, j-a точка є середньою, а розташування стовпців віконного оператора збігаються по напрямку з нормаллю до j-й точки кривої. Обчислення перепаду яскравості виконують, послідовно переміщаючи віконний фільтр по нормалі від нижньої границі зони пошуку до її верхньої границі, знаходять максимальне значення перепаду яскравості на даному інтервалі пошуку і фіксують при цьому координати центра вікна. Відповідно до даних координат роблять маркірування точки максимального перепаду на інтервалі пошуку. При виникненні на інтервалі пошуку декількох однакових максимальних значень перепаду, маркірують точку розташовану ближче до апріорної кривої, при виникненні двох точок, що рівно віддалені від апріорної кривої та мають однакове максимальне значення перепаду, маркірують точку, яка ближче до попередньої маркірованої точки. Описану вище процедуру застосовують для всіх інших точок кривої та одержують на зображенні маркіровані точки, що відповідають уточненій границі об'єкта, після чого уточнена границя згладжується. Замість віконного оператора просторового диференціювання в ряді випадків доцільно використовувати оператор, що складається з одного рядка з елементами заданої ваги (наприклад, рівного одиниці або який зменшується при видаленні номера елемента від середини рядка), у якого координати 2k+1 елементів такі, що в сукупності повторюють форму фрагмента кривої. При цьому для обчислення перепаду яскравості використовують різниці отриманих значень згорток оператора з зображенням, отримані на попередніх і наступних кроках. Для підвищення стійкості до впливу негауссовских перешкод і артефактів, варто використовувати елементи рядка рівної ваги, а замість обчислення згорток, застосовувати медіанну фільтрацію чи виконувати усереднення параметрів точок зображення, координати яких збігаються з координатами елементів вектора-рядка з відбраковуванням «перешкоджаючих» значень (цензурування, вінзорування, усікання і т.д.). Уведення віконного оператора, у якого координати 2k+1 елементів кожного з рядків такі, що в сукупності повторюють форму фрагмента кривої який містить 2k+1 елементарних точок, a j-a точка є середньою, дозволяє узгодити параметри оператора з характеристиками зображення границі в околиці кожної точки кривої і, тим самим, використовува ти апріорну інформацію про границю при побудові локально-адаптивного фільтра для виділення перепадів яскравості. Послідовне переміщення віконного фільтра по нормалі від нижньої границі зони пошуку до її верхньої границі, дозволяє максимізувати відгук фільтра при перетинанні границі перепаду яскравості і забезпечити більш точне визначення її положення, а, отже, підвищити точність виміру геометричних розмірів фрагментів зображення. Апріорні дані про положення границі і максимально можливих помилках оператора при її побудові, дозволяють мінімізувати інтервал пошуку перепаду яскравості і, таким чином, скоротити обсяг обчислень. Використання замість віконного оператора просторового диференціювання оператора, що складається з одного рядка з елементами заданої ваги (наприклад, рівного одиниці або який зменшується при віддаленні номера елемента від середини рядка), у якого координати 2k+1 елементів такі, що в сукупності повторюють форму фрагмента кривої, дозволяє обчислювати різниці згорток віддалених одна від одної по нормалі на задану відстань і, тим самим, забезпечити велику різницю, а, отже, і більш надійне виявлення розмитих границь зображення. Для зменшення імовірності помилкового виявлення перепаду яскравості в результаті впливу негауссо вських шумів і артефактів, замість обчислення згорток зображення з віконним фільтром-рядком з елементами одиничної ваги пропонується використовувати медіанну фільтрацію (Гильбо Е.П., Челпанов И.Б. Обработка сигналов на основе упорядоченного выбора (мажоритарные и близкие к нему преобразования). -М.: Сов. радио, 1976. - 344 с.) 2k+1 елементів зображення, координати яких збігаються з координатами елементів фільтра, або виконувати усереднення параметрів яскравості даних точок зображення з відбраковуванням «перешкоджаючих» значень (цензурування, вінзорування, усікання і т.д.). Заявнику невідомі приклади використання фільтрів для виділення перепадів яскравості, параметри яких змінювалися б з урахуванням апріорних даних про форму і розміри досліджуваного об'єкта в околиці кожної оброблюваної точки зображення, а пошук границі здійснювався б при переміщенні фільтра по апріорно обчисленій нормалі до кривої в заданій точці. Приклад виконання даного способу ілюструється малюнками, на яких зображено: Фіг.1 - тестові зображення з різними відносинами сигнал/шум та різним ступенем розмиття границь, а також результати обробки їх оператором псевдолапласіана та новим методом, заснованим на локально-адаптивній фільтрації з використанням апріорної інформації. Фіг.2 - перетворення вихідного зображення: а) вихідне зображення; б) апріорний контур ЛШ, побудований на зображенні оператором; в) результат застосування запропонованого локально-адаптивного методу виділення контуру ЛШ; Фіг.3 - локально-адаптивна фільтрація з виділенням контуру лівого шлуночка серця на зхокардіограмі (зображений ділянка кривої P0...P k оброблений фільтром і ділянка Рk...Р0-фрагмент апріорної кривої); Фіг.4 - масив оброблюваних даних; Фіг.5 - усереднена діаграма яскравостей елементів рядків. Докладний опис даного способу сполучено з прикладом його конкретного виконання для виділення контуру лівого шлуночка (ЛШ) серця на ультразвуковому зображенні. Сутність методу полягає у виконанні наступних дій: 1. Оператор, використовуючи апріорні дані про форму ЛШ і наявне ультразвукове зображення фіг.2 а, відомим способом (см. Проблемы бионики; Всеукр. Межвед. Науч.-те хн. Сб. 2001, вып. 55, с. 78-79) виділяє М точок в околиці контуру, на підставі яких будується гладка крива, що інтерполює, з N точок фіг.2б. 2. У залежності від характеристик об'єкта зображення і здатності апаратури, що дозволяє, установлюють параметри віконного фільтра: висота вікна К, його ширина L і область пошуку перепаду Н (кількість кроків по нормалі). При використанні віконного фільтра у виді вектора-рядка значення К дорівнює одиниці. 3. Послідовно в кожній точці кривої будують нормаль, уздовж якого буде переміщуватись адаптивний віконний фільтр А, за формою співпадаючий із фрагментом кривої (фіг.3) в околиці даної точки. 4. Значення яскравості в точках, що відповідають елементам адаптивного вікна (фіг.4а), заносять у масив оброблюваних даних Mі[h,l] (фіг.4б). 5. Отриманий масив даних обробляють з метою визначення положення (номера рядка) максимального перепаду яскравості. При цьому, може бути використаний або один з відомих диференціальних операторів виділення вертикальних перепадів яскравості (Прэтт У. Цифровая обработка изображений Пер. с англ. –М.: Мир, 1982 – Кн. 2 - 480 с.), або, для підвищення стійкості до впливу перешкод, для кожного рядка попередньо виконують усереднення параметрів яскравості точок зображення з відбраковуванням «перешкоджаючих» значень (зважене підсумовування, медіанну фільтрацію, цензурування, вінзорування, усікання і т.д.). 6. Отримані усереднені значення яскравості елементів рядків масиву представляють у вигляді векторастовпця M[0,h], усереднена діаграма яскравостей для якого має вигляд як показано на фіг.5. На підставі цих даних легко визначити положення максимального перепаду. Для цього послідовно обчислюють різниці середніх значень яскравостей елементів попередніх і наступних рядків і знаходять номера рядків, для яких модуль цієї різниці максимальний. 7. Індекс h елемента, що дає максимальне значення різниці М[0, h-p] - М[0, h+p], (де р=1, 2, - перемінна, що вибирається в залежності від ступеню розмиття границь зображення і рівня шуму), є потрібним виправленням по нормалі до апріорної кривої в даній точці Значення виправлень зберігаються в масиві D i . У випадку, коли на діаграмі виявляється два рівних по яскравості елемента, що дають максимальне значення, вибирається індекс того елемента, який розташовано ближче до апріорної кривої. Якщо відстані виявляються рівними, вибирається індекс того елемента, що ближче розташований до попередньої уточненої точки кривої. 8. Аналогічні дії (п. 3-7) виконують для всіх інши х точок апріорної кривої. 9. Координати точок апріорної кривої перетворюють з урахуванням виправлень, у результаті одержуємо уточнений контур, представлений на фіг.2в, кожна точка якого відповідає максимальному перепаду яскравості при переміщенні по нормалі до апріорної кривої. Відповідно до викладеного методу була розроблена комп'ютерна програма і виконане виділення контуру тестового зображення, представленого на фіг.1а, новим методом, заснованим на локально-адаптивній фільтрації з використанням апріорної інформації. Результат, представлений на фіг.1в, підтверджує е фективність способу виділення границь об'єкта на зображенні, що заявляється. Таким чином, використання рішення, що заявляється, у порівнянні з усіма відомими аналогічними способами призначення забезпечує наступні переваги підвищення точності визначення положення максимального перепаду яскравості, а, отже, і значне підвищення точності вимірів геометричних розмірів фрагментів зображень, велику стійкість до впливу перешкод та менший обсяг обчислень.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determining the boundaries of an object on an image
Автори англійськоюBoiko Valerii Volodymyrovych, Kryvoruchko Ihor Andriiovych, Krakhmalova Olena Olehivna, Krakhmalova Olena Olehivna
Назва патенту російськоюСпособ определения границ объекта в изображении
Автори російськоюБойко Валерий Владимирович, Криворучко Игорь Андреевич, Крахмалова Елена Олеговна
МПК / Мітки
МПК: G06K 9/64
Мітки: виділення, зображенні, спосіб, об'єкта, границь
Код посилання
<a href="https://ua.patents.su/5-70489-sposib-vidilennya-granic-obehkta-na-zobrazhenni.html" target="_blank" rel="follow" title="База патентів України">Спосіб виділення границь об’єкта на зображенні</a>
Спосіб визначення границь міцності цегли при тиску і вигині
Номер патенту: 54053
Опубліковано: 17.02.2003
Автори: Горячих Марія Володимирівна, Андрющенко Олександр Павлович, Шмигальський Володимир Никифорович
МПК: G01N 33/38, G01N 3/08
Мітки: спосіб, границь, тиску, цегли, визначення, вигині, міцності
Формула / Реферат:
Спосіб визначення границь міцності цегли при стиску і вигині, що містить попередній добір цеглин, випробування їх на гідравлічному пресі шляхом прикладення руйнівного навантаження до грані цеглини, який відрізняється тим, що руйнівне навантаження прикладають до ложкової грані цілої цеглини, границю міцності при стиску визначають за формулою:де Р -...
Блок порівняння апарата для виявлення неоднорідностей у зображенні об’єкта
Номер патенту: 50235
Опубліковано: 15.07.2004
Автор: Александров Леонід Костянтинович
Мітки: апарата, виявлення, порівняння, неоднорідностей, зображенні, блок, об'єкта
Формула / Реферат:
1. Блок порівняння апарата для виявлення неоднорідностей у зображенні об'єкта, що містить вузли різниці і суматори, який відрізняється тим, що перший вхід блока порівняння є першим входом першого суматора і підімкнений до входу першого елемента передачі, вихід першого елемента передачі підімкнено до першого входу першого вузла різниці, до другого входу першого вузла різниці підімкнено вихід другого суматора, перший вхід другого суматора...
Спосіб виділення малорухомих об’єктів
Номер патенту: 31333
Опубліковано: 15.12.2000
Автори: Карпенко Владислав Володимирович, Рибачук Олег Ігорьович, Даник Юрій Григорович, Топольницький Павло Петрович, Дяченко Дмитро Володимирович
МПК: G01S 17/00
Мітки: спосіб, малорухомих, виділення, об'єктів
Формула / Реферат:
Спосіб виділення малорухомих об’єктів, що полягає в формуванні першого, другого, третього і четвертого зображень об'єктів на фоні спільного сюжета в двох різних точках простору, реєстрації перетворенні зображень, що зареєструвалися в двоградаційні, формуванні першого і другого різницевих зображень шляхом попарного порівняння першого і третього, другого і четвертого двоградаційних зображень відповідно, формуванні третього різницевих зображення...
Спосіб виділення збудника туберкульозу, живильне середовище і активатор росту мікобактерій для виділення збудника туберкульозу
Номер патенту: 44660
Опубліковано: 15.02.2002
Автори: Власенко Володимир Васильович, Багрій Петро Іванович
МПК: C12N 1/20, C12N 1/38, C12R 1/32, C12N 1/02, C12Q 1/04
Мітки: туберкульозу, середовище, активатор, мікобактерій, росту, спосіб, збудника, виділення, живильне
Формула / Реферат:
1. Спосіб виділення збудника туберкульозу, що включає приготування живильного середовища, підготовку патологічного матеріалу, висів патологічного матеріалу на живильне середовище з наступним термостатуванням, який відрізняється тим, що патологічний матеріал попередньо обробляють активатором росту мікобактерій протягом 24 - 48 годин при температурі 36±1° С з отриманням посівної суспензії, яку вносять на живильне середовище.2. Спосіб за...
Спосіб виділення на площі ділянок неоднорідної будови грунтового масиву
Номер патенту: 64221
Опубліковано: 16.02.2004
Автори: Стовас Галина Михайлівна, Довбнич Михайло Михайлович, Білий Йосип Станіславович, Кузіна Галина Петрівна
МПК: G01V 3/08
Мітки: виділення, грунтового, ділянок, неоднорідної, спосіб, масиву, площі, будови
Формула / Реферат:
Спосіб виділення на площі ділянок неоднорідної будови грунтового масиву надто різноманітного літологічного складу (знещільнених, обводнених зон) у верхній частині розрізу шляхом реєстрації щільності потоку природного імпульсного поля Землі, який відрізняється тим, що за ступенем поглинання потоку площа території, яка вивчається, розділяється на ділянки, які є більше чи менше знещільненими чи обводненими, що відображається у рівні поглинання...
Попередній патент: Напій “студентський”
Наступний патент: Пристрій для формування виробів з бетонних сумішей
Випадковий патент: Скребок для ланкових ланцюгів скребкових конвеєрів і стопорний елемент для скребка