Спосіб вимірювання параметрів руху космічних апаратів оптичними засобами
Номер патенту: 58545
Опубліковано: 11.04.2011
Автори: Фриз Сергій Петрович, Ожінський Віктор Васильович, Петрожалко Володимир Володимирович, Парфенюк Василь Григорович

Формула / Реферат
Спосіб вимірювання параметрів руху космічних апаратів (КА) оптичними засобами, який полягає в тому, що в зоні видимості - сеансі вимірювань параметрів руху КА бортовий комплекс керування приймає щосекундно дані про параметри руху ![]() у Гринвіцькій системі координат з навігаційного приймача (ЄР5, "Глобалстар", "Глонасс"), обробляє їх, обраховує кути між надиром та напрямком на квантово-оптичну систему (вимірювальні засоби) та видає їх значення до підсистеми орієнтації та стабілізації для виконання відворотів, а в цей час квантово-оптичні засоби здійснюють захват, супроводження та високоточне вимірювання параметрів руху КА, який відрізняється тим, що в КА для точної ідентифікації та підвищення коефіцієнта відбиття КА використовують орієнтовані на вимірювальні засоби сонячні батареї.
у Гринвіцькій системі координат з навігаційного приймача (ЄР5, "Глобалстар", "Глонасс"), обробляє їх, обраховує кути між надиром та напрямком на квантово-оптичну систему (вимірювальні засоби) та видає їх значення до підсистеми орієнтації та стабілізації для виконання відворотів, а в цей час квантово-оптичні засоби здійснюють захват, супроводження та високоточне вимірювання параметрів руху КА, який відрізняється тим, що в КА для точної ідентифікації та підвищення коефіцієнта відбиття КА використовують орієнтовані на вимірювальні засоби сонячні батареї.
Текст
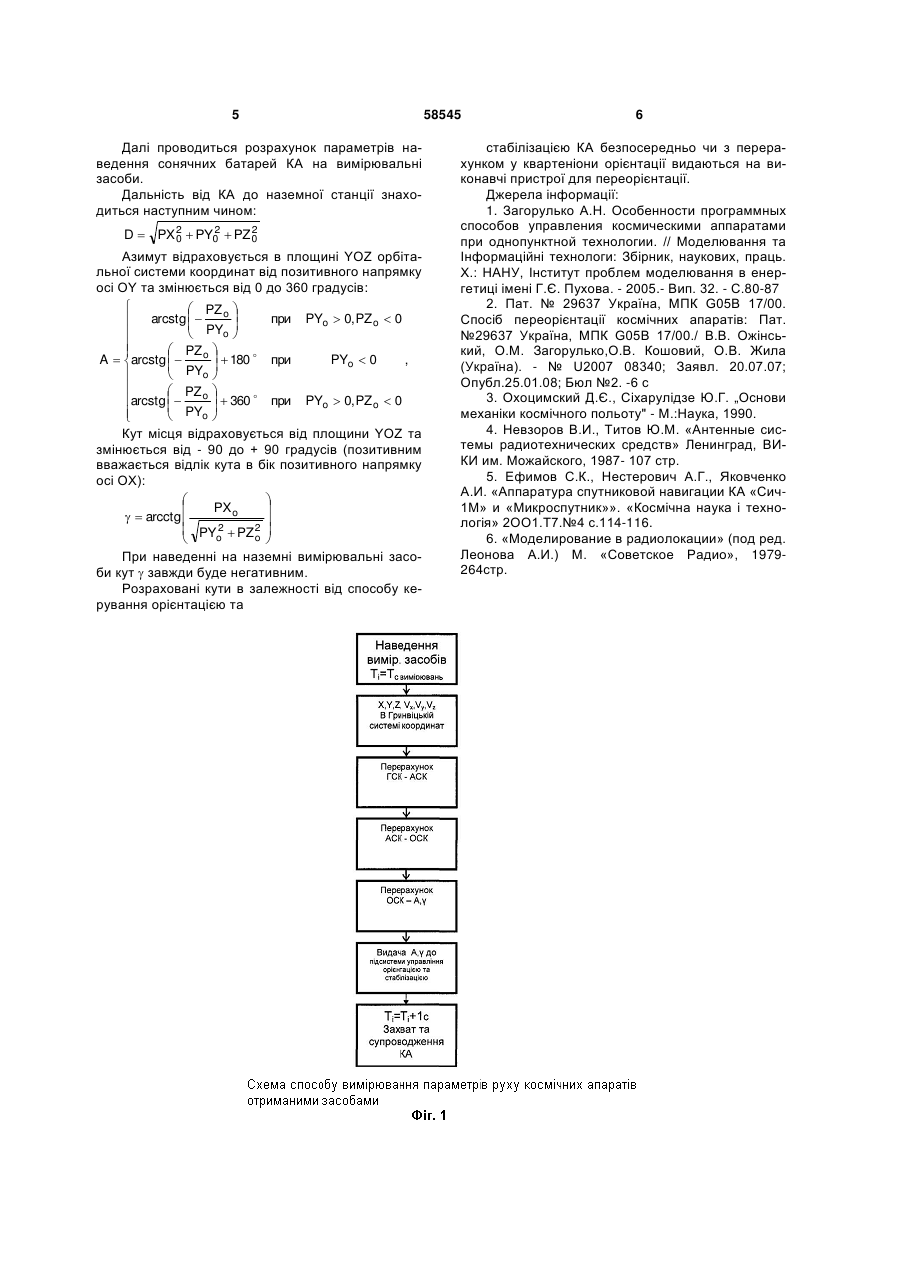
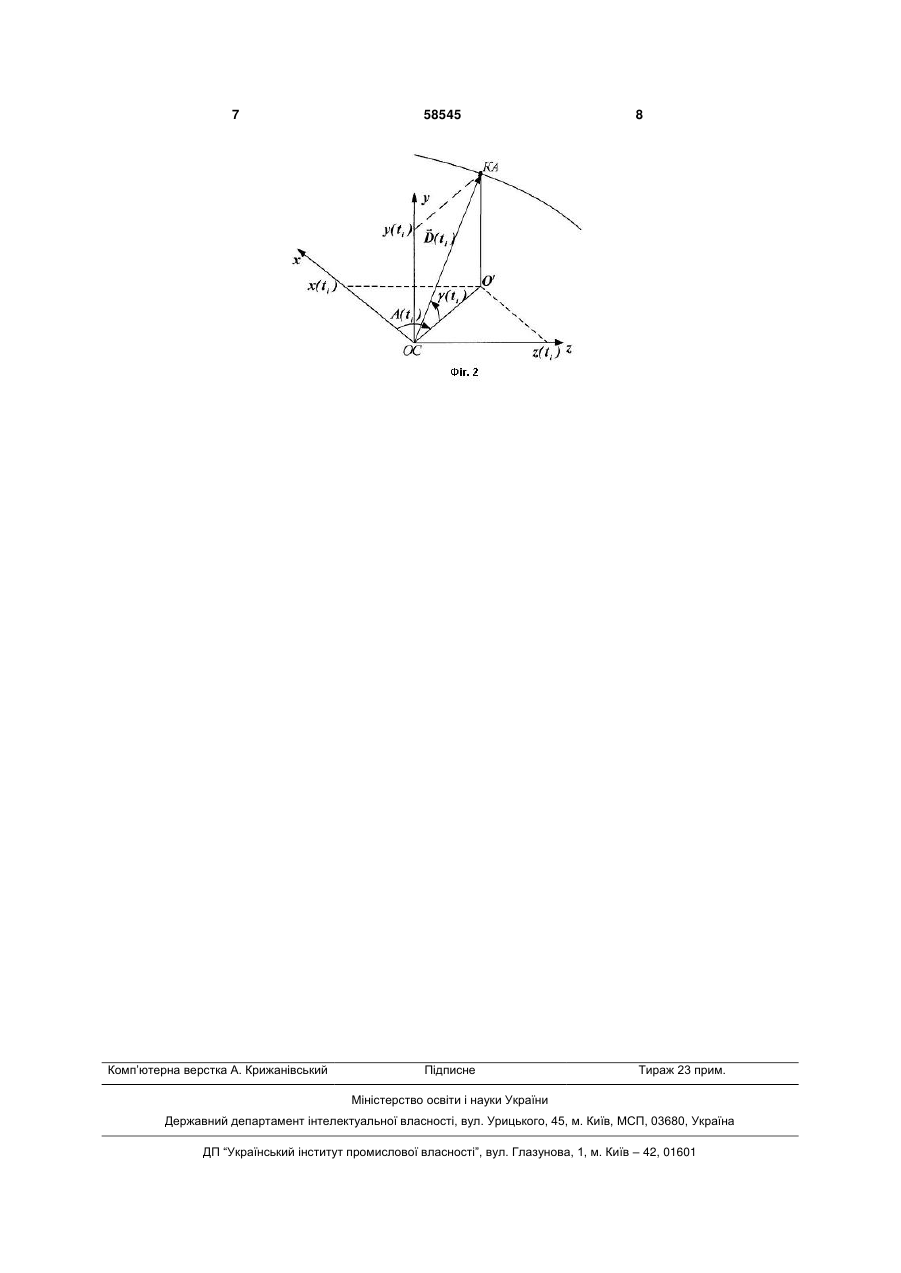
Спосіб вимірювання параметрів руху космічних апаратів (КА) оптичними засобами, який полягає в тому, що в зоні видимості - сеансі вимірювань параметрів руху КА бортовий комплекс керування приймає щосекундно дані про парамет ри руху KA ( X, Y, Z, Vx , Vy , Vz , T ) у Гринвіцькій сис Корисна модель належить до галузі балістичного забезпечення польотів космічних апаратів (КА), зокрема, до наземних квантово-оптичних систем, може бути використана в підсистемах балістичного забезпечення польотів вітчизняними космічними апаратами, що працюють в умовах однопунктної технології, для вирішення задач з отримання високоточної інформації про параметри руху КА. Відомий спосіб вимірювання параметрів руху КА передбачає під час входу у зону видимості наземних оптичних засобів у темний час доби захват та супроводження підсвіченого Сонцем КА та проведення вимірів квантовою системою[1]. Недоліком відомого способу, є те, що КА та його найяскравіша частина з великим значенням коефіцієнтом відбиття - панелі сонячних батарей орієнтовані на Сонце, тому вірна ідентифікація КА та його захват у кут огляду квантової системи є досить складним. Разом з тим в цьому випадку зменшується відсоток відбитого опромінювання і точність вимірювань параметрів руху КА, частково цей недолік компенсується встановленням кутових відбивачів [3], але це є неефективним використанням ресурсів КА та невиправданим збільшенням його маси. Найбільш близьким до пропонованого технічним рішенням, обраним як прототип, є спосіб програмних відворотів КА [2]. У основу корисної моделі покладено завдання створити спосіб вимірювання параметрів руху КА оптичними засобами, який шляхом використання обчислювальних можливостей бортового комплексу керування та вимірів апаратури супутникової навігації дав можливість забезпечити орієнтацію сонячних батарей КА у напрямку квантовооптичної системи для збільшення альбедо КА на фоні зоряного неба та збільшити ймовірність точної ідентифікації КА та підвищити точність вимірів параметрів руху КА. Для рішення поставленого завдання у способі вимірювання параметрів руху КА оптичними засобами, який полягає в тому, що в зоні видимості сеансі вимірювань параметрів руху КА бортовий комплекс керування БКК) приймає щосекундно дані про параметри руху KA ( X, Y, Z, Vx , Vy , Vz , T ) у (13) 58545 (11) UA (19) Гринвічській системі координат з навігаційного приймача(ЄР5, «Глобалстар», «Глонасс»), обробляє їх, обраховує кути між надиром та напрямком на квантово-оптичну систему (вимірювальні засоби) та видає їх значення до підсистеми орієнтації та стабілізації для виконання відворотів, а в цей час квантово-оптичні засоби здійснюють захват, супроводження та високоточне вимірювання параметрів руху КА. При цьому в КА для точної ідентифікації та підвищення коефіцієнта відбиття КА використовують орієнтовані на вимірювальні засоби сонячні батареї. U темі координат з навігаційного приймача (ЄР5, "Глобалстар", "Глонасс"), обробляє їх, обраховує кути між надиром та напрямком на квантовооптичну систему (вимірювальні засоби) та видає їх значення до підсистеми орієнтації та стабілізації для виконання відворотів, а в цей час квантовооптичні засоби здійснюють захват, супроводження та високоточне вимірювання параметрів руху КА, який відрізняється тим, що в КА для точної ідентифікації та підвищення коефіцієнта відбиття КА використовують орієнтовані на вимірювальні засоби сонячні батареї. 3 Суть запропонованої корисної моделі полягає у наступному: Найбільш точними методами визначення параметрів руху КА є оптичні методи з використанням квантових систем. Підвищення розрізнювальної здатності КА та зростання вимагає покращення точності вимірів параметрів руху КА, що вимагає використання оптичних методів. Поряд з тим проведення сеансів вимірів поряд із специфікою функціонування самих квантовооптичних систем ускладнюється збільшенням КА та космічного сміття, що значно ускладнюють точну ідентифікацію КА та вимірювання його параметрів руху. До вимірюваних параметрів відносяться: - похила дальність від КА до вимірювача D; - швидкість зміни похилої дальності D; - кути, які визначають напрямок від вимірювача на КА (азимут А та кут місця ); - похідні цих кутів А' та '; - кути між напрямком на апарат та двома фіксованими об'єктами (зорями, планетами, КА); - косинуси кутів між напрямком «вимірювач апарат» та фіксованими об'єктами (направляючі косинуси). Оскільки майже кожен сучасний космічний апарат містить у своєму складі навігаційний приймач, пропонується використати процесор БКК, який буде отримувати дані з навігаційного приймача, проводити обчислення необхідних кутів відвороту та видавати команди в підсистему орієнтації та стабілізації для виконання орієнтації робочої площини сонячних батарей на вимірювальні засоби. Алгоритм функціонування БКК є наступним. При вході в зону видимості оптичних засобів та їх наведення в напрямку ймовірного розташування КА (прогнозовані А та на час входження) в результаті рішення навігаційної задачі апаратура супутникової навігації формує вектор Kg (KXg,KY ,KVx ,KVy ,KVz )T координат та g g g g швидкостей космічного апарата (КА) у Гринвічській рухомій системі координат (ГРСК), яка вводиться наступним чином: початок системи відліку у центрі Землі, вісь ОХ лежить у площині екватора та направлена на Гринвічський меридіан, вісь ОZ по осі обертання Землі, вісь OY доповнює систему до правої. Для визначення параметрів орієнтації сонячних батарей, визначаються координати наземної прийомної станції у системі відліку, що зв'язана з центром КА. Для цього послідовно виконуються наступні переходи. 1. Переведення координат КА із ГРСК до абсолютної екваторіальної системи координат (АГЕСК), яка вводиться наступним чином: початок системи відліку у центрі Землі, вісь ОХ лежить у площині екватора та направлена на точку весня 58545 4 ного рівнодення, вісь OZ колінеарна осі обертання Землі, вісь OZ доповнює систему до правої. Для того, щоб сумістити осі ГРСК та АГЕСК, достатньо зробити один поворот на кут S, що чисельно дорівнює зоряному часу на Гринвічському меридіані в заданий момент часу в UTC. Вектор K (KX,KY,KVx ,KVy ,KVz )T координат та швидкостей в АГЕСК, із урахуванням переносної швидкості центра мас КА та обертання Землі із швидкістю , розраховуються по наступних формулах: KX KX g cos S KYg sin S KY KX g sin S KYg cos S KZ KZ g KVx KVx g cos S KVy g sin S KY KVy KVx g cos S KVy g cos S KX KVz KVz g 2. Переведення координат наземних вимірювальних засобів Pg (PXg,PY ,PZg ) із ГРСК до АГЕСК (P ) g PX PX g cos S PYg sin S PY PX g sin S PYg cos S PZ PZ g 3. Проводиться розрахунок координат наземних вимірювальних засобів в орбітальній системі координат (ОСК), яка вводиться наступним чином: початок системи відліку співпадає з центром мас КА, вісь ОХ направлена по радіусу-вектору супутника (проведеному із центру Землі), вісь OY паралельна трансверсальній складовій швидкості, вісь OZ доповнює систему до правої. Для визначення складових в ОСК необхідно послідовно виконати повороти на кути (пряме сходження висхідного вузла орбіти), І (нахилення орбіти), U (аргумент широти супутника). Кути , І, U обчислюються із елементів вектору K відповідно до методики, що викладена в [3]. Для подальших розрахунків складові швидкості в ОСК не використовуються. Координатні складові вектора Po (PXo,PY ,PZo,PVx ,PVy ,PVz )T в ОСК o o o o визначаються наступним чином: PX o PX KX PYo M PY KY , де: PZ o PZ KZ M - матриця переходу, яка розраховується по формулах: cos u sin cos i sin u cos sin u sin i cos u cos cos i sin u sin M sin u cos cos i cos u sin sin u sin cos i cos u cos sin i cos u sin i sin sin i cos cos i 5 Далі проводиться розрахунок параметрів наведення сонячних батарей КА на вимірювальні засоби. Дальність від КА до наземної станції знаходиться наступним чином: 2 2 2 D PX 0 PY0 PZ 0 Азимут відраховується в площині YOZ орбітальної системи координат від позитивного напрямку осі OY та змінюється від 0 до 360 градусів: PZ o при PYo 0, PZ o 0 arcstg PY o PZ o , A arcstg PYo 0 PY 180 при o PZ o arcstg PY 360 при PYo 0, PZ o 0 o Кут місця відраховується від площини YOZ та змінюється від - 90 до + 90 градусів (позитивним вважається відлік кута в бік позитивного напрямку осі ОХ): PX o arcctg 2 2 PYo PZ o При наведенні на наземні вимірювальні засоби кут завжди буде негативним. Розраховані кути в залежності від способу керування орієнтацією та 58545 6 стабілізацією КА безпосередньо чи з перерахунком у квартеніони орієнтації видаються на виконавчі пристрої для переорієнтації. Джерела інформації: 1. Загорулько А.Н. Особенности программных способов управления космическими аппаратами при однопунктной технологии. // Моделювання та Інформаційні технологи: Збірник, наукових, праць. X.: НАНУ, Інститут проблем моделювання в енергетиці імені Г.Є. Пухова. - 2005.- Вип. 32. - С.80-87 2. Пат. № 29637 Україна, МПК G05B 17/00. Спосіб переорієнтації космічних апаратів: Пат. №29637 Україна, МПК G05B 17/00./ В.В. Ожінський, О.М. Загорулько,О.В. Кошовий, О.В. Жила (Україна). - № U2007 08340; Заявл. 20.07.07; Опубл.25.01.08; Бюл №2. -6 с 3. Охоцимский Д.Є., Сіхарулідзе Ю.Г. „Основи механіки космічного польоту" - М.:Наука, 1990. 4. Невзоров В.И., Титов Ю.М. «Антенные системы радиотехнических средств» Ленинград, ВИКИ им. Можайского, 1987- 107 стр. 5. Ефимов С.К., Нестерович А.Г., Яковченко А.И. «Аппаратура спутниковой навигации КА «Сич1М» и «Микроспутник»». «Космічна наука і технологія» 2ОО1.Т7.№4 с.114-116. 6. «Моделирование в радиолокации» (под ред. Леонова А.И.) М. «Советское Радио», 1979264стр. 7 Комп’ютерна верстка А. Крижанівський 58545 8 Підписне Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of measuring motion parameters of a spacecraft by optical means
Автори англійськоюOzhinskyi Viktor Vasyliovych, Parfeniuk Vasyl Hryhorovych, Fryz Serhii Petrovych, Petrozhalko Volodymyr Volodymyrovych
Назва патенту російськоюСпособ измерения параметров движения космических аппаратов оптическими средствами
Автори російськоюОжинский Виктор Васильевич, Парфенюк Василий Григорьевич, Фриз Сергей Петрович, Петрожалко Владимир Владимирович
МПК / Мітки
МПК: B64G 3/00
Мітки: засобами, спосіб, оптичними, руху, космічних, апаратів, параметрів, вимірювання
Код посилання
<a href="https://ua.patents.su/4-58545-sposib-vimiryuvannya-parametriv-rukhu-kosmichnikh-aparativ-optichnimi-zasobami.html" target="_blank" rel="follow" title="База патентів України">Спосіб вимірювання параметрів руху космічних апаратів оптичними засобами</a>
Модернізований частотно-часовий метод вимірювання параметрів руху літальних апаратів
Номер патенту: 65099
Опубліковано: 15.03.2004
Автор: Коломійцев Олексій Володимирович
МПК: G01S 17/66, G01S 17/42
Мітки: частотно-часовий, літальних, апаратів, модернізований, параметрів, руху, метод, вимірювання
Формула / Реферат:
Модернізований частотно-часовий метод вимірювання параметрів руху літальних апаратів, який полягає у тому, що на передавальному боці шестипараметрійної лазерної вимірювальної системи (ЛВС) із синхронізованого спектра випромінювання одномодового багаточастотного лазера за допомогою селектора подовжніх мод виділяють необхідні пари частот для створення рівносигнального напрямку (РСН) у вигляді 4-х, які частково перетинаються, парціальних...
Спосіб переорієнтації космічних апаратів
Номер патенту: 29637
Опубліковано: 25.01.2008
Автори: Кошовий Олег Віталійович, Жила Олексій Володимирович, Ожінський Віктор Васильович, Загорулько Олександр Миколайович
МПК: G05B 17/00
Мітки: переорієнтації, космічних, апаратів, спосіб
Формула / Реферат:
Спосіб переорієнтації космічних апаратів, який полягає в тому, що в сеансі зв’язку процесор приймає щосекундно дані про параметри руху космічних апаратів (X, Y, Z, Vx, Vy, Vz, T) у Гринвіцькій системі координат з навігаційного приймача (GPS, "Глобалстар"), обробляє їх, обраховує кути між надиром та напрямком на ППІ та видає їх значення до підсистеми орієнтації та стабілізації для виконання відворотів, який відрізняється тим, що...
Спосіб захисту командних радіоліній космічних апаратів
Номер патенту: 38812
Опубліковано: 26.01.2009
Автори: Ожінський Віктор Васильович, Богом'я Володимир Іванович, Загорулько Олександр Миколайович
МПК: G05B 17/00
Мітки: радіоліній, захисту, командних, спосіб, космічних, апаратів
Формула / Реферат:
Спосіб захисту командних радіоліній космічних апаратів, який полягає в тому, що в сеансі зв'язку космічний апарат (КА) проводить авторизацію наземного пункту керування за підписом, цифровим ключем та додатково з використанням навігаційного приймача визначаються координати наземного передавача і порівнюються із записаними до постійного запам'ятовуючого пристрою на борту КА відповідно номеру та приймається рішення про обробку повідомлень від...
Спосіб ідентифікації зірок оптичними засобами контролю космічного простору
Номер патенту: 39687
Опубліковано: 10.03.2009
Автори: Богдановський Олексій Миколайович, Ломоносов Сергій Євгенійович, Брюховецький Олександр Борисович, Саваневич Вадим Євгенович
МПК: B64G 3/00
Мітки: засобами, спосіб, ідентифікації, космічного, оптичними, контролю, простору, зірок
Формула / Реферат:
Спосіб ідентифікації зірок оптичними засобами контролю космічного простору, який полягає в аналізі параметрів зображення космічних об'єктів (КО), а саме кута повороту зображення об'єкта відносно площини екватора та розміру треку, сформованого внаслідок проходження зірки крізь поле зору оптичного засобу, що дозволить підвищити швидкість та якість обробки оптичної інформації, а також забезпечити додаткові відомості про характер орієнтації...
Спосіб ультразвукового вимірювання параметрів руху і пристрій для його реалізації
Номер патенту: 67829
Опубліковано: 15.07.2004
Автори: Волохов Володимир Олексійович, МАРУСЕНКО АНАТОЛІЙ ІЛАРІОНОВИЧ, Гірник Сергій Арнольдович, БАРАННИК ЄВГЕН ОЛЕКСАНДРОВИЧ
МПК: A61B 8/00
Мітки: руху, пристрій, спосіб, параметрів, реалізації, ультразвукового, вимірювання
Формула / Реферат:
1. Спосіб ультразвукового імпульсного вимірювання параметрів руху суцільних середовищ, який містить задання напрямку зондування досліджуваного середовища, періодичне випромінювання вздовж заданого напрямку зондування послідовності зондуючих ультразвукових хвильових імпульсів, прийом ультразвукових хвиль, відбитих від досліджуваного середовища, перетворення відбитих ультразвукових хвиль в електричний сигнал відгуку, його підсилення,...
Попередній патент: Лінія по переробці біомаси в біогаз, електричну енергію, тепло та органічні добрива
Наступний патент: Пристрій для живлення радіоелектронної апаратури
Випадковий патент: Спосіб розріджування крохмалю