Спосіб переорієнтації космічних апаратів
Номер патенту: 29637
Опубліковано: 25.01.2008
Автори: Ожінський Віктор Васильович, Загорулько Олександр Миколайович, Кошовий Олег Віталійович, Жила Олексій Володимирович
Формула / Реферат
Спосіб переорієнтації космічних апаратів, який полягає в тому, що в сеансі зв’язку процесор приймає щосекундно дані про параметри руху космічних апаратів (X, Y, Z, Vx, Vy, Vz, T) у Гринвіцькій системі координат з навігаційного приймача (GPS, "Глобалстар"), обробляє їх, обраховує кути між надиром та напрямком на ППІ та видає їх значення до підсистеми орієнтації та стабілізації для виконання відворотів, який відрізняється тим, що космічні апарати при переорієнтації функціонують автономно, використовуючи навігаційні дані з апаратури супутникової навігації, а не обраховані на Землі програмні команди.
Текст
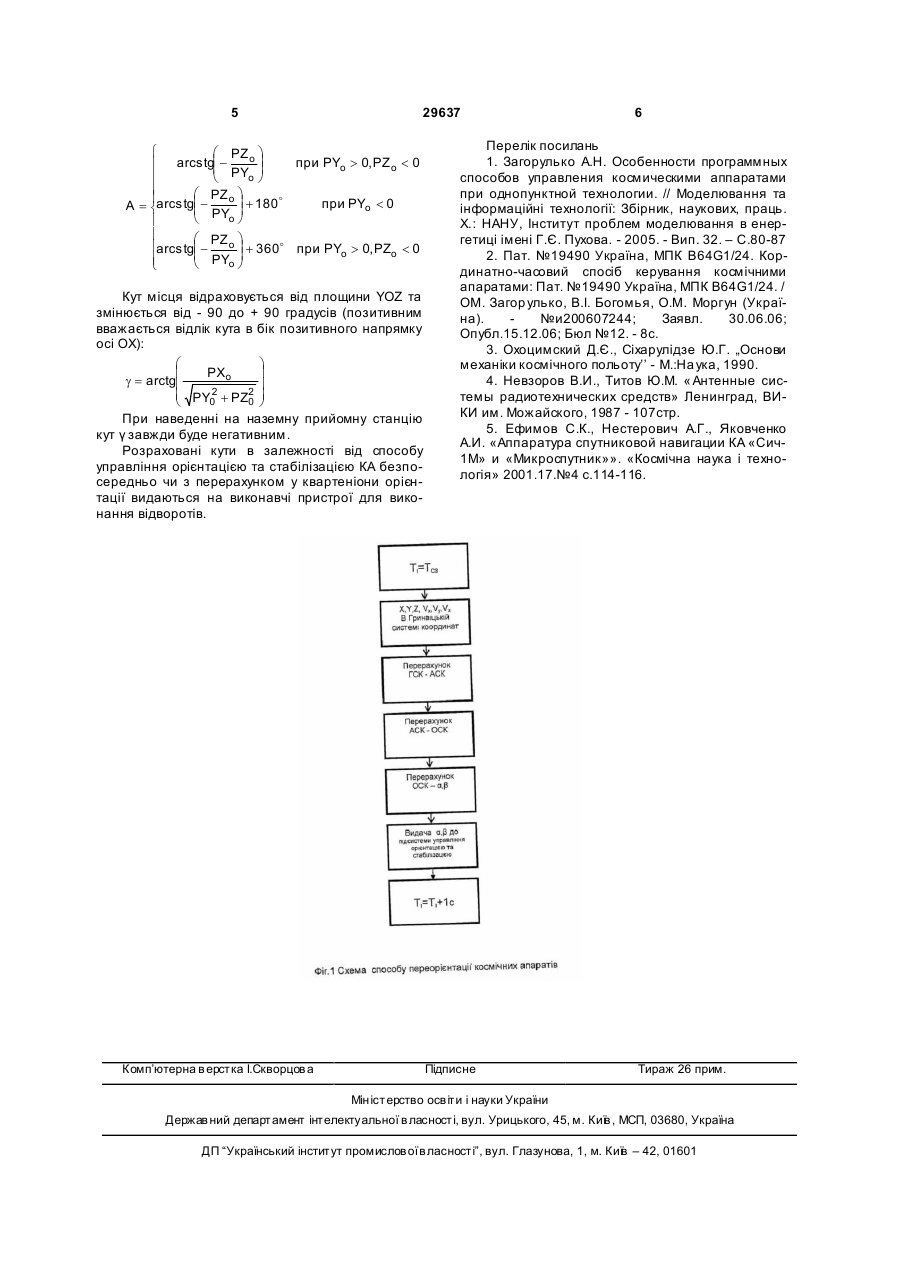
Спосіб переорієнтації космічних апаратів, який полягає в тому, що в сеансі зв’язку процесор приймає щосекундно дані про параметри руху косміч 3 29637 4 антенних систем. Тому технологічно в процесі лено дорівнює зоряному часу на Гринвічському проведення сеансу зв'язку з КА відбувається відмеридіані в заданий момент часу в UTC. Вектор хилення антенних систем чи КА в цілому в напряKa = (KX a, KYa , KZa , KVx a , KVy a , KVz a )T координат мку ППІ. При використанні часового методу управта швидкостей в АГЕСК, із урахуванням переносління КА процедура таких відхилень виглядає ної швидкості центру мас КА та обертання Землі із таким чином: [2] швидкістю ω, розраховуються по наступним фор- в Центрі управління польотами космічних мулам: [3,4] апаратів проводиться аналіз балістичної інформаКХа=KXg ×cosS-KYg .sinS ції та визначаються витки радіовидимості КА з ППІ; KYa=KXg .sinS+KYg .cosS - відповідно до об'єму інформації, яку плануKZa=KZg ється отримати від апаратури корисного навантаження визначаються витки проведення сеансів KVxa=KVxg ×cosS-KVyg ×sinS- w ×KYa зв'язку з КА; KVya=KVxg ×sinS+KVyg .cosS+ w .KXa - розраховується час, необхідний для передачі KVza=KVzg інформації (вмикання/вимикання бортового пере2. Переведення координат наземної прийомдавача); ної станції Pg =(PXg ,PYg ,PZg ) із ГРСК до АГЕСК - розраховуються кути програмних відворотів для проведення сеансів зв'язку; ( Pa ): - формується список програмних команд, який PXa=PXg .cosS-PYg .sinS закладається на борт КА. PYa=PXg ×sinS+PYg -cosS Такий підхід є неоптимальним з таких причин: PZa=PZg - похибки, які викликані нестабільністю борто3. Проводиться розрахунок координат наземвого еталону часу призводять до значних похибок ної прийомної станції в орбітальній системі коорпри обчисленні кутів відхилення, 1 секунда часу динат (ОСК), яка вводиться наступним чином, по~8км по трасі, що автоматично тягне за собою чаток системи відліку співпадає з центром мас КА, погіршення якості зв'язку (характеристик каналу); вісь ОХ направлена по радіусу-вектору суп утника - знижується автономність функціонування КА, (проведеному із центру Землі), вісь OY паралельщо особливо відчутно в умовах обмежень вітчизна трансверсальній складовій швидкості, вісь OZ няної однопунктної технології управління КА, коли доповнює систему до правої Для визначення кількість сеансів управління КА невелика. складових в ОСК необхідно послідовно виконати Оскільки майже кожен сучасний космічний повороти на кути Ω (пряме сходження висхідного апарат містить у своєму складі навігаційний привузла орбіти), I (нахилення орбіти), U (аргумент ймач, пропонується використати процесор (бортошироти супутника). Кути Ω, I, U обчислюються із ву ци фрову обчислювальну машину), який буде отримувати дані з навігаційного приймача, провоелементів вектору K a відповідно до методики, що дити обчислення необхідних куті в відвороту та викладена в [1]. Для подальших розрахунків склавидавати команди в підсистему орієнтації та стадові швидкості в ОСК не використовуються. Коорбілізації для виконання відворотів. динатні складові вектора ' Алгоритм функціонування процесору бортової = (PXa ,PYo , PZo , PVx o , PVy o , PVz o )O в ОСК виPo обчислювальної машини буде наступним. В результаті рішення навігаційної задачі апаратура значаються наступним чином [3, 4] суп утникової навігації формує вектор éPXo ù éPXa - KXa ù ' ê ú ê ú O = (KXg , KYg, KZ g, KVx g, KVy g , KVz g ) Kg координат êPYo ú = M × êPYa - KYa ú , де êPZo ú êPZ a - KZa ú та швидкостей космічного апарату (КА) у Гринвічë û ë û ській рухомій системі координат (ГРСК), яка ввоΜ - матриця переходу, яка розраховується по диться наступним чином: початок системи відліку у формулам центрі Землі, вісь ОХ лежить у площині екватора é cos ucos W - cos i sin u sin W cos u sin W + cos i sin u cos W sin u sin i ù та направлена на Гринвічський меридіан, вісь OZ M = ê- sin u cos W - cos icos u sin W - sin u sin W + cos i cos u cos W sin i cos u ú ê ú ê по осі обертання Землі, вісь OY доповнює систему sin i sin W - sin icos W cos i ú ë û до правої. [5] Для визначення параметрів наведення антени, Далі проводиться розрахунок параметрів наяка знаходиться на борту, визнаються координати ведення антени(космічного апарату) на наземну наземної прийомної станції у системі відліку, що прийомну станцію. зв'язана з центром КА. Для цього послідовно викоДальність від КА до наземної станції знахонуються наступні переходи. диться наступним чином. 1 Переведення координат КА із ГРСК до абсо2 D = PX2 + PY0 + PZ2 лютної екваторіальної системи координат 0 0 (АГЕСК), яка вводиться наступним чином: початок Азимут відраховується в площині YOZ орбітасистеми відліку у центрі Землі, вісь ОХ лежить у льної системи координат від позитивного напрямку площині екватора та направлена на точку весняосі OY та змінюється від 0 до 360 градусів: ного рівнодення, вісь OZ колінеарна осі обертання Землі, вісь OZ доповнює систему до правої. Для того, щоб сумістити осі ГРСК та АГЕСК, достатньо зробити один поворот на кут S, що чис 5 29637 ì æ PZ o ö при PYo > 0, PZ o < 0 ï arcstgç ç PY ÷ ÷ ï o ø è ï æ PZ o ö o ï при PYo 0, PZo < 0 ç PY ÷ ï oø è î Кут місця відраховується від площини YOZ та змінюється від - 90 до + 90 градусів (позитивним вважається відлік кута в бік позитивного напрямку осі ОХ): æ ö ç PXo ÷ g = arctgç ÷ 2 2 ÷ ç PY + PZ 0 0 ø è При наведенні на наземну прийомну станцію кут γ завжди буде негативним. Розраховані кути в залежності від способу управління орієнтацією та стабілізацією КА безпосередньо чи з перерахунком у квартеніони орієнтації видаються на виконавчі пристрої для виконання відворотів. Комп’ютерна в ерстка І.Скворцов а 6 Перелік посилань 1. Загорулько А.Н. Особенности программных способов управления космическими аппаратами при однопунктной технологии. // Моделювання та інформаційні технології: Збірник, наукових, праць. X.: НАНУ, Інститут проблем моделювання в енергетиці імені Г.Є. Пухова. - 2005. - Вип. 32. – С.80-87 2. Пат. №19490 Україна, МПК B64G1/24. Кординатно-часовий спосіб керування космічними апаратами: Пат. №19490 Україна, МПК B64G1/24. / ОМ. Загор улько, В.І. Богомья, О.М. Моргун (Україна). №и200607244; Заявл. 30.06.06; Опубл.15.12.06; Бюл №12. - 8с. 3. Охоцимский Д.Є., Сіхарулідзе Ю.Г. „Основи механіки космічного польоту’’ - М.:На ука, 1990. 4. Невзоров В.И., Титов Ю.М. « Антенные системы радиотехнических средств» Ленинград, ВИКИ им. Можайского, 1987 - 107стр. 5. Ефимов С.К., Нестерович А.Г., Яковченко А.И. «Аппаратура спутниковой навигации КА «Сич1М» и «Микроспутник»». «Космічна наука і технологія» 2001.17.№4 с.114-116. Підписне Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for re-orientation of spacecrafts
Автори англійськоюOzhinskyi Viktor Vasyliovych, Zahorulko Oleksandr Mykolaiovych, Koshovyi Oleh Vitaliiovych, Zhyla Oleksii Volodymyrovych
Назва патенту російськоюСпособ переориентации космических аппаратов
Автори російськоюОжинский Виктор Васильевич, Загорулько Александр Николаевич, Кошовый Олег Вітальевич, Жила Алексей Владимирович
МПК / Мітки
МПК: G05B 17/00
Мітки: переорієнтації, космічних, апаратів, спосіб
Код посилання
<a href="https://ua.patents.su/3-29637-sposib-pereoriehntaci-kosmichnikh-aparativ.html" target="_blank" rel="follow" title="База патентів України">Спосіб переорієнтації космічних апаратів</a>
Інтегрована система навігаційного забезпечення низькоорбітальних космічних апаратів
Номер патенту: 24686
Опубліковано: 10.07.2007
Автори: Загорулько Олександр Миколайович, Козелкова Катерина Сергіївна, Богом'я Володимир Іванович, Моргун Олександр Андрійович
МПК: G01C 21/24, G01S 5/02
Мітки: апаратів, низькоорбітальних, космічних, система, забезпечення, інтегрована, навігаційного
Формула / Реферат:
Інтегрована система навігаційного забезпечення низькоорбітальних космічних апаратів, що містить антенний пристрій, навігаційний приймальний пристрій і навігаційний процесор, яка відрізняється тим, що навігаційний процесор виконаний з можливістю динамічної фільтрації вимірювань на основі моделі гравітаційного поля Землі з гармоніками розкладання гравітаційного потенціалу розмірності 36х36, що дозволяє підвищити точність визначення координат...
Спосіб визначення орбіт навігаційних космічних апаратів
Номер патенту: 36808
Опубліковано: 16.04.2001
Автори: Деденок Віктор Петрович, Голкін Дмитро Васильович, Голкіна Валентина Василівна, Бутенко Ольга Станіславівна
МПК: G01S 5/00
Мітки: космічних, визначення, апаратів, спосіб, навігаційних, орбіт
Текст:
...Врахуємо тепер, що у випадку незалежних і рівноточних вимірів (4) Kr=sr2×І де І - одинична матриця (МхМ); sr2 - дисперсія помилок одиничних вимірів різності дальностей в однобазовому вимірювальному комплексі. З ура хуванням (4) рівняння (3) перетворюють до вигляду (5) sr2(AT×А)= (AT×А)×Кр×(AT×А) Домножують ліву і праву частини рівняння (5) зліва і справа на матрицю (AT×А)-1, обернену матриці (AT×А). Остаточно отримують (6) Кр=sr2×(AT×А)-1...
Спосіб одержання реактивної тяги для космічних літальних апаратів
Номер патенту: 38030
Опубліковано: 15.05.2001
Автори: Потапов Юрій Семенович, Фоминський Леонід Павлович
МПК: F03H 5/00
Мітки: літальних, спосіб, реактивної, тяги, космічних, апаратів, одержання
Текст:
...витрати енергоресурсів (ядерного «палива» та ін.), що вимагаються для досягнення однієї і тієї ж величини реактивної тяги. Цим досягається поставлена задача зменшення витрати енергоресурсів. Використання за запропонованим винаходом компактної і легкої вихрової тр уби чи іншого пристрою, що приводить воднемістку речовину в обертання, замість багатотонного ядерного реактора у відомому способі, дозволяє зменшити масу реактивного двигуна,...
Спосіб ідентифікації космічних апаратів по неконтрольованому випромінюванню бортової апаратури
Номер патенту: 27130
Опубліковано: 25.10.2007
Автори: Ломоносов Сергій Євгенійович, Рачинський Костянтин Олександрович, Рачинський Олександр Петрович, Поляков Олександр Леонідович
МПК: B64G 3/00
Мітки: спосіб, ідентифікації, неконтрольованому, бортової, випромінюванню, апаратів, апаратури, космічних
Формула / Реферат:
Спосіб ідентифікації космічних апаратів по неконтрольованому випромінюванню бортової апаратури космічного апарата, при якому аналізують неконтрольоване випромінювання об’єкта космічного апарата, в умовах відсутності інформації про призначення космічного апарата та технічних характеристик спеціальної апаратури і наявності початкових умов орбітального руху об’єкта, а далі обробляють отриману інформацію за допомогою спеціального...
Спосіб зменшення маси газореактивних двигунових установок корекції орбіти і орієнтації космічних апаратів
Номер патенту: 73354
Опубліковано: 15.07.2005
Автори: Кошкін Михайло Іванович, Доброгорський Віктор Антонович, Сергійчук Борис Васильович, Шабохін Віктор Олексійович, Аніщенко Вячеслав Михайлович
МПК: F02K 9/42
Мітки: корекції, газореактивних, орієнтації, апаратів, космічних, спосіб, зменшення, маси, установок, орбіти, двигунових
Формула / Реферат:
Спосіб зменшення маси газореактивних двигунових установок корекції орбіти і орієнтації космічних апаратів шляхом заправлення балонів для зберігання робочого тіла дво- чи одноатомними газами - повітрям, азотом чи аргоном, який відрізняється тим, що спочатку балони заправляють принаймні одним багатоатомним газом, наприклад двоокисом вуглецю, при цьому обмежують парціальний тиск заправлення ним балонів величиною, що не перевищує тиска пружності...
Попередній патент: Спосіб литва під тиском з двома камерами пресування
Наступний патент: Пристрій для запобігання виділенню неприємних запахів з унітаза
Випадковий патент: Спосіб одержання магнітних графітових матеріалів та матеріал, одержаний цим способом