Модернізований частотно-часовий метод вимірювання параметрів руху літальних апаратів
Формула / Реферат
Модернізований частотно-часовий метод вимірювання параметрів руху літальних апаратів, який полягає у тому, що на передавальному боці шестипараметрійної лазерної вимірювальної системи (ЛВС) із синхронізованого спектра випромінювання одномодового багаточастотного лазера за допомогою селектора подовжніх мод виділяють необхідні пари частот для створення рівносигнального напрямку (РСН) у вигляді 4-х, які частково перетинаються, парціальних діаграм спрямованості (ДС), «підфарбованих» різницевими частотами міжмодових битів ![]() ,
, ![]() ,
, ![]() ,
, ![]() , які попарно зустрічно сканують у кожній із двох ортогональних площин завдяки використанню блока дефлекторів, який відрізняється тим, що зустрічне сканування пар парціальних ДС здійснюють з заданим кутом відхилення у кожній із двох ортогональних площин з приведенням на приймальному боці шестипараметричної ЛВС до зрушення обгинальних періодів пачок імпульсів частот міжмодових битів за один повний прохід ДС у прямому і зворотному напрямку сканування, це зрушення дає похибки супроводження по кутах, а різниця в тривалості обгинальних (півперіодів) дає похибки кутових швидкостей, зустрічне сканування пар парціальних ДС у кожній із двох ортогональних площин дозволяє також вимірювати з високою точністю похилу дальність до літального апарата по запізнюванню частот міжмодових битів, де для боротьби з неоднозначністю вимірювань використовують багатошкальний метод вимірювання, а також його радіальну швидкість доплерівським методом, оскільки найкращий режим сканування забезпечується при напівперекритті ДС.
, які попарно зустрічно сканують у кожній із двох ортогональних площин завдяки використанню блока дефлекторів, який відрізняється тим, що зустрічне сканування пар парціальних ДС здійснюють з заданим кутом відхилення у кожній із двох ортогональних площин з приведенням на приймальному боці шестипараметричної ЛВС до зрушення обгинальних періодів пачок імпульсів частот міжмодових битів за один повний прохід ДС у прямому і зворотному напрямку сканування, це зрушення дає похибки супроводження по кутах, а різниця в тривалості обгинальних (півперіодів) дає похибки кутових швидкостей, зустрічне сканування пар парціальних ДС у кожній із двох ортогональних площин дозволяє також вимірювати з високою точністю похилу дальність до літального апарата по запізнюванню частот міжмодових битів, де для боротьби з неоднозначністю вимірювань використовують багатошкальний метод вимірювання, а також його радіальну швидкість доплерівським методом, оскільки найкращий режим сканування забезпечується при напівперекритті ДС.
Текст
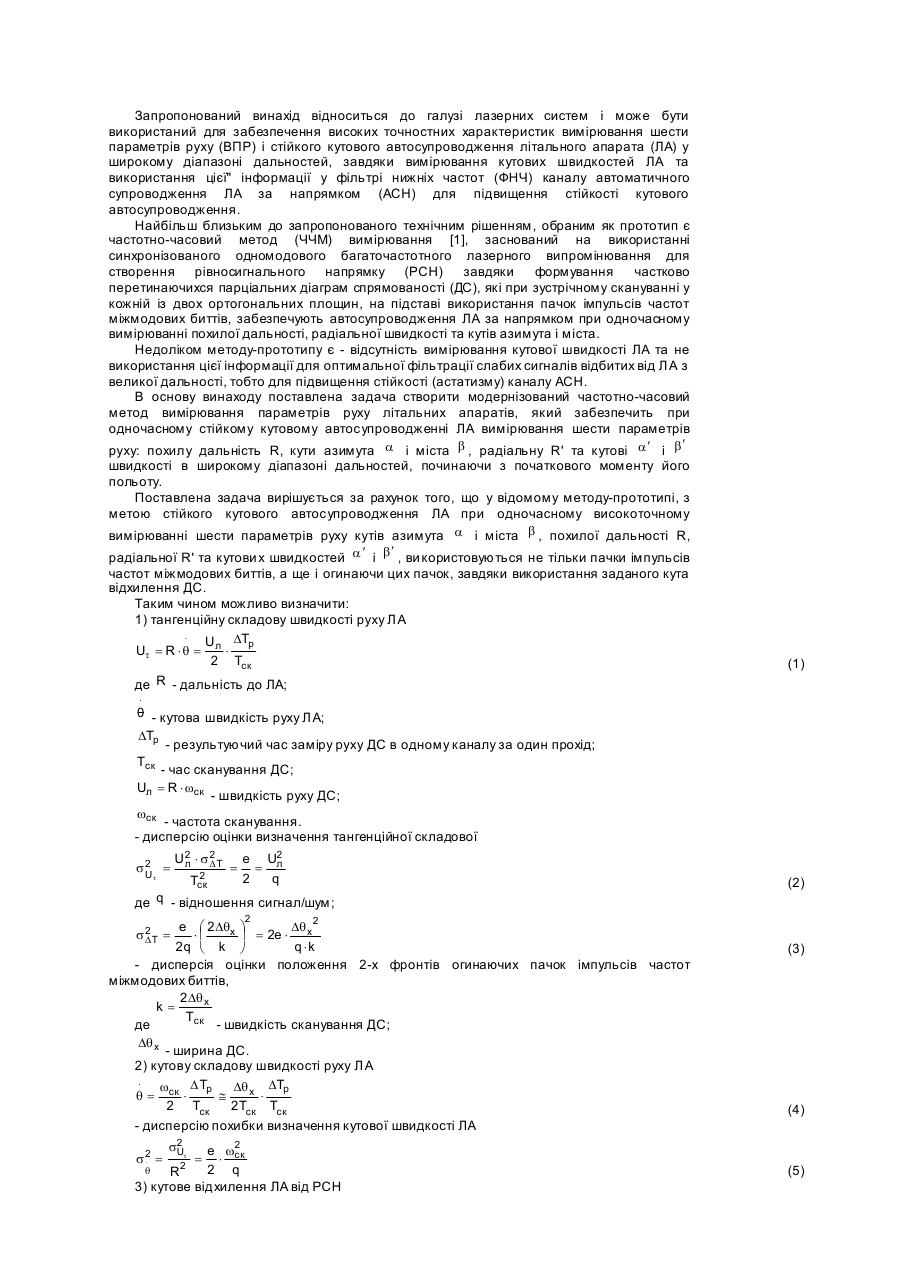
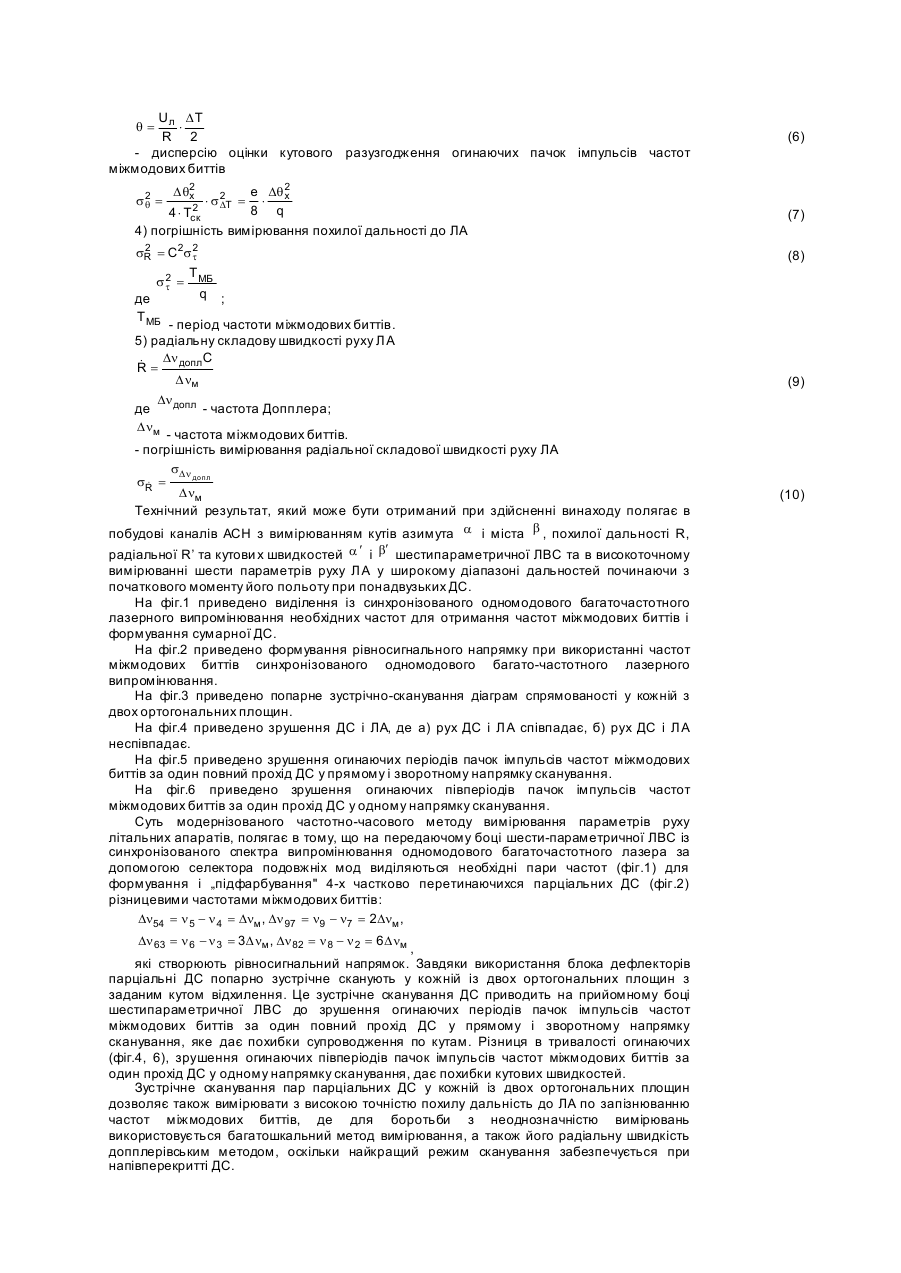
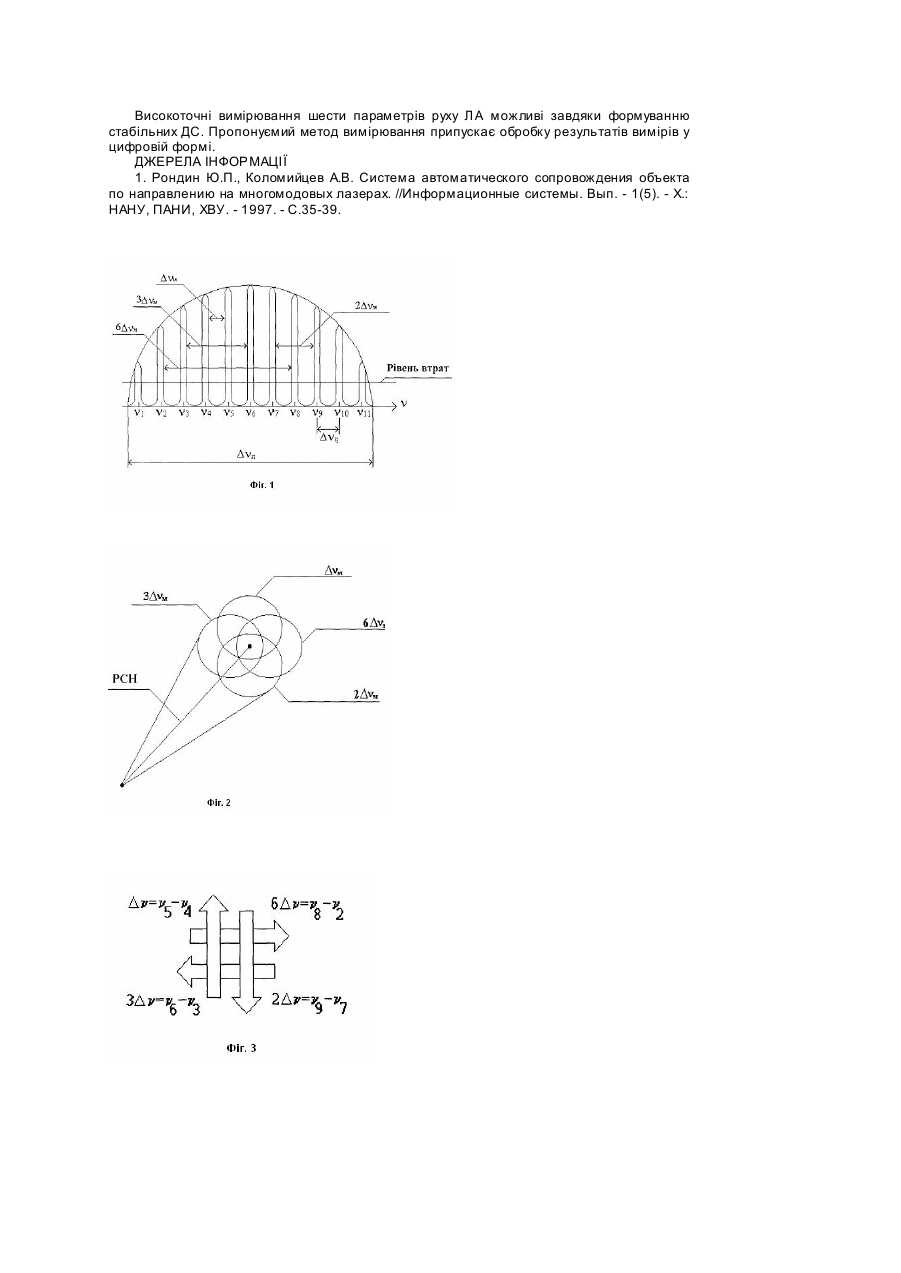
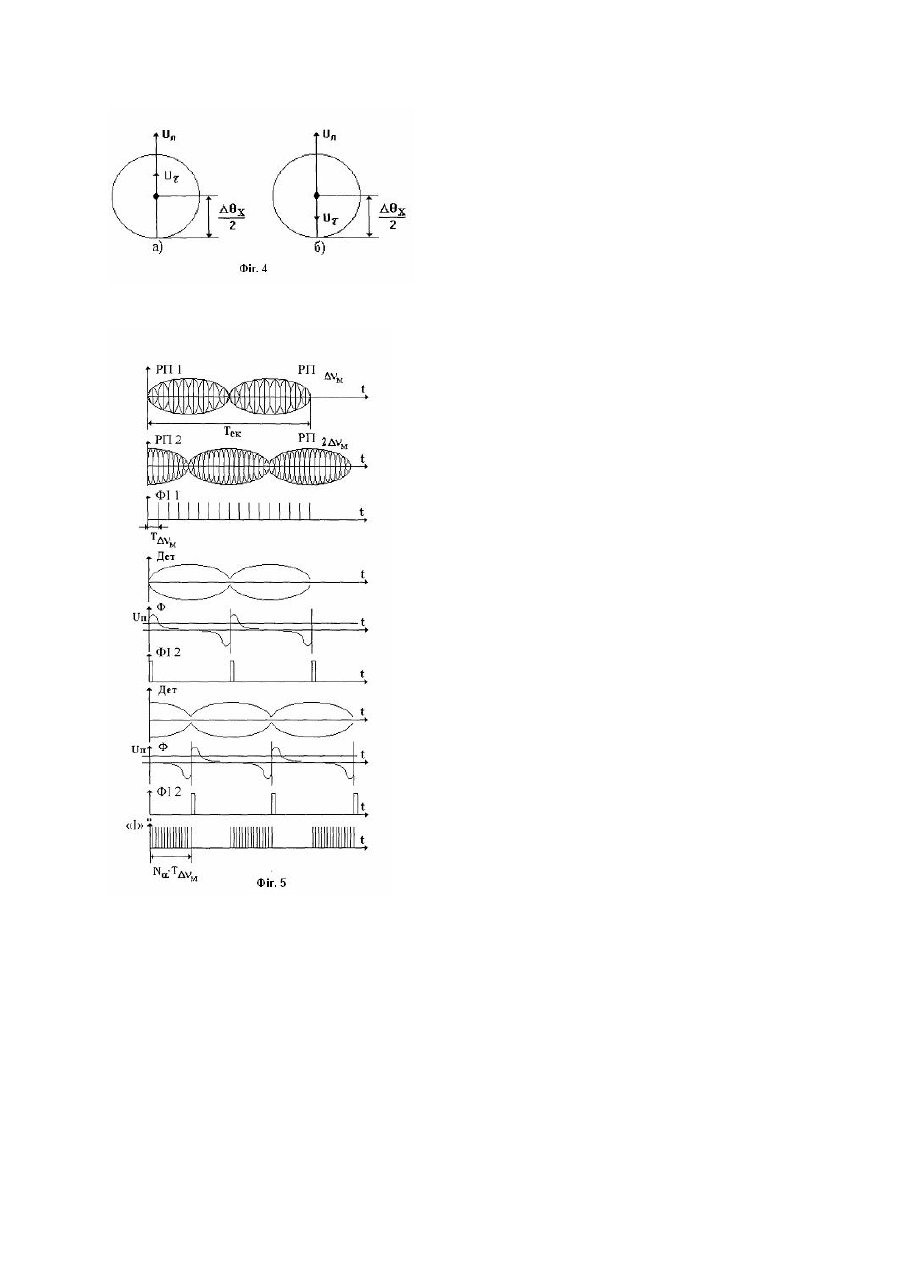
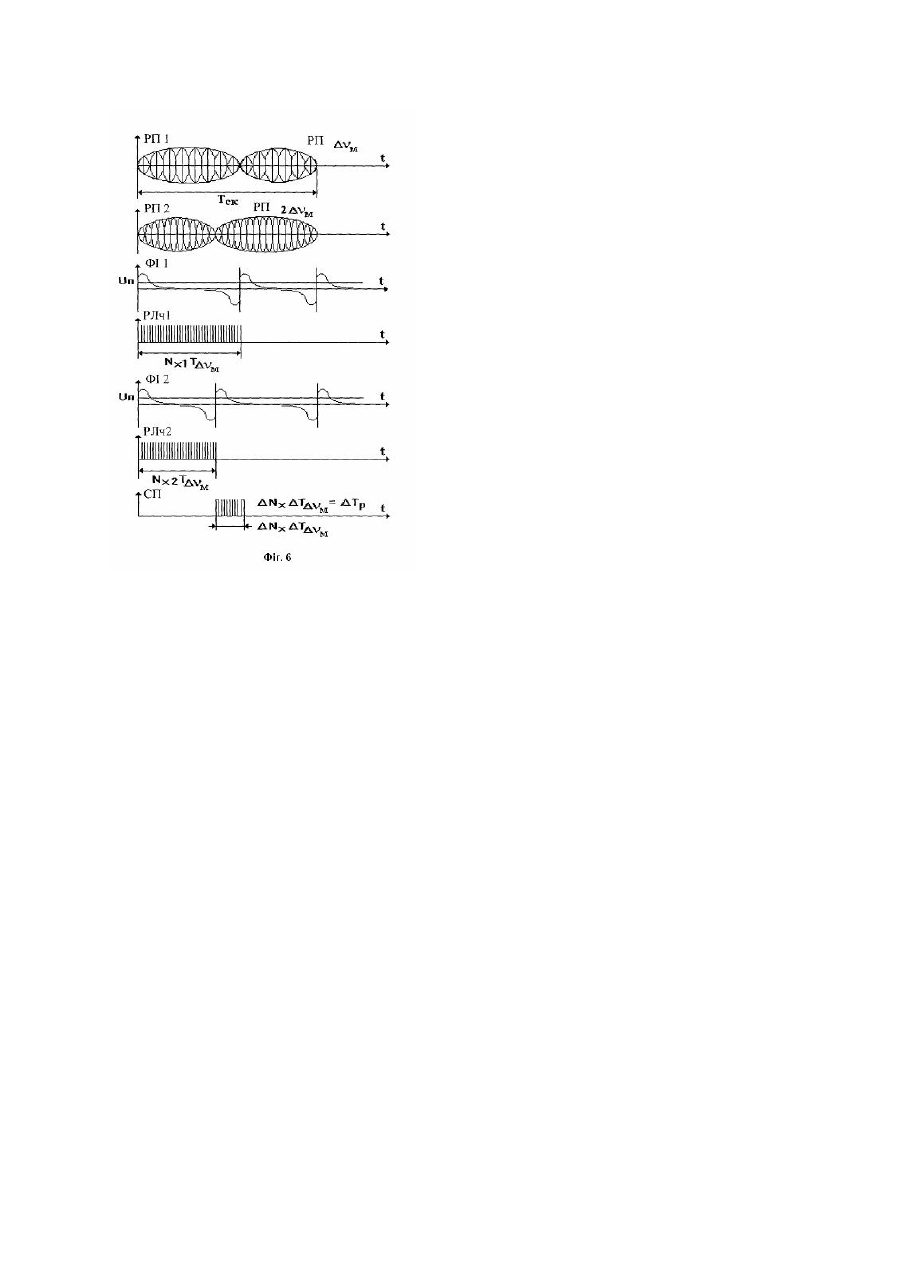
Запропонований винахід відноситься до галузі лазерних систем і може бути використаний для забезпечення високих точностних характеристик вимірювання шести параметрів руху (ВПР) і стійкого кутового автосупроводження літального апарата (ЛА) у широкому діапазоні дальностей, завдяки вимірювання кутових швидкостей ЛА та використання цієї" інформації у фільтрі нижніх частот (ФНЧ) каналу автоматичного супроводження ЛА за напрямком (АСН) для підвищення стійкості кутового автосупроводження. Найбільш близьким до запропонованого технічним рішенням, обраним як прототип є частотно-часовий метод (ЧЧМ) вимірювання [1], заснований на використанні синхронізованого одномодового багаточастотного лазерного випромінювання для створення рівносигнального напрямку (РСН) завдяки формування частково перетинаючихся парціальних діаграм спрямованості (ДС), які при зустрічному скануванні у кожній із двох ортогональних площин, на підставі використання пачок імпульсів частот міжмодових биттів, забезпечують автосупроводження ЛА за напрямком при одночасному вимірюванні похилої дальності, радіальної швидкості та кутів азимута і міста. Недоліком методу-прототипу є - відсутність вимірювання кутової швидкості ЛА та не використання цієї інформації для оптимальної фільтрації слабих сигналів відбитих від ЛА з великої дальності, тобто для підвищення стійкості (астатизму) каналу АСН. В основу винаходу поставлена задача створити модернізований частотно-часовий метод вимірювання параметрів руху літальних апаратів, який забезпечить при одночасному стійкому кутовому автосупроводженні ЛА вимірювання шести параметрів руху: похилу дальність R, кути азимута a і міста b , радіальну R' та кутові a ¢ і b ¢ швидкості в широкому діапазоні дальностей, починаючи з початкового моменту його польоту. Поставлена задача вирішується за рахунок того, що у відомому методу-прототипі, з метою стійкого кутового автосупроводження ЛА при одночасному високоточному вимірюванні шести параметрів руху кутів азимута a і міста b , похилої дальності R, радіальної R' та кутови х швидкостей a ¢ і b ¢ , ви користовуються не тільки пачки імпульсів частот міжмодових биттів, а ще і огинаючи цих пачок, завдяки використання заданого кута відхилення ДС. Таким чином можливо визначити: 1) тангенційну складову швидкості руху ЛА × U DTp Ut = R × q = л × 2 Tск R - дальність до ЛА; де (1) × 0 - кутова швидкість руху ЛА; DTp - результуючий час заміру руху ДС в одному каналу за один прохід; Tск - час сканування ДС; Uл = R × wск - швидкість руху ДС; wск - частота сканування. - дисперсію оцінки визначення тангенційної складової s2 = U U2 × s 2 T л D t 2 Tск = e U2 = л 2 q де q - відношення сигнал/шум; 2 2 e æ 2 Dqx ö Dq ×ç ÷ = 2e × x 2q è k ø q ×k - дисперсія оцінки положення 2-х фронтів огинаючих пачок імпульсів частот міжмодових биттів, 2Dq x k= Tск де - швидкість сканування ДС; Dq x - ширина ДС. 2) кутову складову швидкості руху ЛА × D Tp w Dq x DTp q = ск × @ × 2 Tск 2Tск Tск - дисперсію похибки визначення кутової швидкості ЛА s2T = D s2 t U e w2 × ск q 2 q R2 3) кутове відхилення ЛА від РСН s2 = × = (2) (3) (4) (5) Uл D T × R 2 - дисперсію оцінки кутового разузгодження огинаючих пачок імпульсів частот міжмодових биттів q= s2 = q D q2 x × s 2T = D e Dq 2 × x 8 q 2 4 × Tск 4) погрішність вимірювання похилої дальності до ЛА 2 sR = C2s 2 t Т МБ 2 st = q ; де Т МБ - період частоти міжмодових биттів. 5) радіальну складову швидкості руху ЛА & Dn допл С R= D nм Dn допл де - частота Допплера; D nм - частота міжмодових биттів. - погрішність вимірювання радіальної складової швидкості руху ЛА sDn допл sR = & D nм Технічний результат, який може бути отриманий при здійсненні винаходу полягає в побудові каналів АСН з вимірюванням кутів азимута a і міста b , похилої дальності R, радіальної R’ та кутови х швидкостей a ¢ і b¢ шестипараметричної ЛВС та в високоточному вимірюванні шести параметрів руху ЛА у широкому діапазоні дальностей починаючи з початкового моменту його польоту при понадвузьких ДС. На фіг.1 приведено виділення із синхронізованого одномодового багаточастотного лазерного випромінювання необхідних частот для отримання частот міжмодових биттів і формування сумарної ДС. На фіг.2 приведено формування рівносигнального напрямку при використанні частот міжмодових биттів синхронізованого одномодового багато-частотного лазерного випромінювання. На фіг.3 приведено попарне зустрічно-сканування діаграм спрямованості у кожній з двох ортогональних площин. На фіг.4 приведено зрушення ДС і ЛА, де а) рух ДС і ЛА співпадає, б) рух ДС і ЛА неспівпадає. На фіг.5 приведено зрушення огинаючих періодів пачок імпульсів частот міжмодових биттів за один повний прохід ДС у прямому і зворотному напрямку сканування. На фіг.6 приведено зрушення огинаючих півперіодів пачок імпульсів частот міжмодових биттів за один прохід ДС у одному напрямку сканування. Суть модернізованого частотно-часового методу вимірювання параметрів руху літальних апаратів, полягає в тому, що на передаючому боці шести-параметричної ЛВС із синхронізованого спектра випромінювання одномодового багаточастотного лазера за допомогою селектора подовжніх мод виділяються необхідні пари частот (фіг.1) для формування і „підфарбування" 4-х частково перетинаючихся парціальних ДС (фіг.2) різницевими частотами міжмодових биттів: Dn54 = n 5 - n 4 = Dnм , Dn 97 = n9 - n7 = 2Dnм , Dn 63 = n 6 - n 3 = 3D nм , Dn 82 = n 8 - n 2 = 6D nм , які створюють рівносигнальний напрямок. Завдяки використання блока дефлекторів парціальні ДС попарно зустрічне сканують у кожній із двох ортогональних площин з заданим кутом відхилення. Це зустрічне сканування ДС приводить на прийомному боці шестипараметричної ЛВС до зрушення огинаючих періодів пачок імпульсів частот міжмодових биттів за один повний прохід ДС у прямому і зворотному напрямку сканування, яке дає похибки супроводження по кутам. Різниця в тривалості огинаючих (фіг.4, 6), зрушення огинаючих півперіодів пачок імпульсів частот міжмодових биттів за один прохід ДС у одному напрямку сканування, дає похибки кутових швидкостей. Зустрічне сканування пар парціальних ДС у кожній із двох ортогональних площин дозволяє також вимірювати з високою точністю похилу дальність до ЛА по запізнюванню частот міжмодових биттів, де для боротьби з неоднозначністю вимірювань використовується багатошкальний метод вимірювання, а також його радіальну швидкість допплерівським методом, оскільки найкращий режим сканування забезпечується при напівперекритті ДС. (6) (7) (8) (9) (10) Високоточні вимірювання шести параметрів руху ЛА можливі завдяки формуванню стабільних ДС. Пропонуємий метод вимірювання припускає обробку результатів вимірів у цифровій формі. ДЖЕРЕЛА ІНФОРМАЦІЇ 1. Рондин Ю.П., Коломийцев А.В. Система автоматического сопровождения объекта по направлению на многомодовых лазерах. //Информационные системы. Вып. - 1(5). - X.: НАНУ, ПАНИ, ХВУ. - 1997. - С.35-39.
ДивитисяДодаткова інформація
Назва патенту англійськоюImproved time-frequency method of measuring the aircraft flight parameters
Автори англійськоюKolomiitsev Oleksii Volodymyrovych
Назва патенту російськоюУсовершенствованный время-частотный метод измерения параметров движения летательного аппарата
Автори російськоюКоломийцев Алексей Владимирович
МПК / Мітки
МПК: G01S 17/66, G01S 17/42
Мітки: модернізований, літальних, вимірювання, апаратів, руху, параметрів, метод, частотно-часовий
Код посилання
<a href="https://ua.patents.su/5-65099-modernizovanijj-chastotno-chasovijj-metod-vimiryuvannya-parametriv-rukhu-litalnikh-aparativ.html" target="_blank" rel="follow" title="База патентів України">Модернізований частотно-часовий метод вимірювання параметрів руху літальних апаратів</a>
Канал вимірювання радіальної швидкості літальних апаратів на основі модернізованого частотно-часового методу вимірювання
Номер патенту: 61680
Опубліковано: 17.11.2003
Автори: Альошин Геннадій Васильович, Пашков Дмитро Павлович, Коломійцев Олексій Володимирович
МПК: G01S 17/42
Мітки: швидкості, вимірювання, літальних, модернізованого, основі, частотно-часового, канал, апаратів, радіальної, методу
Формула / Реферат:
Канал вимірювання радіальної швидкості літальних апаратів на основі модернізованого частотно-часового методу, що містить послідовно підключені лазер з накачкою, селектор подовжніх мод (СПМ), передавальну оптику, приймальну оптику, фотодетектор, резонансні підсилювачі, схеми порівняння (СП) амплітуд, підсилювачі (фільтри) сигналів похибок (ПСП) та виконавчі пристрої (ВП) керування кутами азимута і місця, який відрізняється тим, що з метою...
Канал вимірювання кутових швидкостей літальних апаратів на основі модернізованого частотно-часового методу
Номер патенту: 63285
Опубліковано: 15.01.2004
Автори: Пашков Дмитро Павлович, Коломійцев Олексій Володимирович, Альошин Геннадій Васильович
МПК: G01S 17/42, G01S 11/00
Мітки: канал, основі, модернізованого, апаратів, методу, кутових, швидкостей, частотно-часового, літальних, вимірювання
Формула / Реферат:
Канал вимірювання кутових швидкостей літальних апаратів на основі модернізованого частотно-часового методу, що містить послідовно підключені лазер з накачкою, селектор подовжніх мод, передавальну оптику, приймальну оптику, фотодетектор, резонансні підсилювачі, схеми порівняння амплітуд, підсилювачі у вигляді фільтрів сигналів похибок та виконавчі пристрої керування кутами азимута і місця, який відрізняється тим, що додатково після...
Канал автоматичного супроводження літальних апаратів за напрямком на підставі модернізованого частотно-часового методу вимірювання
Номер патенту: 59115
Опубліковано: 15.08.2003
Автори: Коломійцев Олексій Володимирович, Пашков Дмитро Павлович, Альошин Геннадій Васильович
МПК: G01S 17/42, G01S 17/66
Мітки: канал, напрямком, літальних, вимірювання, методу, модернізованого, частотно-часового, апаратів, підставі, автоматичного, супроводження
Формула / Реферат:
Канал автоматичного супроводження літальних апаратів (ЛА) за напрямком на підставі модернізованого частотно-часового методу, що містить послідовно включені лазер з накачкою, селектор подовжніх мод (СПМ), передавальну оптику, приймальну оптику, фотодетектор, резонансні підсилювачі, схеми порівняння (СП) амплітуд, фільтри (підсилювачі) сигналів похибок та виконавчі пристрої керування кутами азимута і місця, який відрізняється тим, що ...
Високоточна лазерна шестипараметрична система на основі модернізованого частотно-часового метода вимірювання
Номер патенту: 58392
Опубліковано: 15.07.2003
Автори: Пашков Дмитро Павлович, Коломійцев Олексій Володимирович, Альошин Геннадій Васильович
МПК: G01S 17/66, G01S 17/42
Мітки: метода, модернізованого, частотно-часового, основі, лазерна, вимірювання, високоточна, система, шестипараметрична
Формула / Реферат:
Високоточна лазерна шестипараметрична система на основі модернізованого частотно-часового методу вимірювання, що містить послідовно включені лазер з накачкою, селектор подовжніх мод (СПМ), передавальну оптику, приймальну оптику, фотодетектор, резонансні підсилювачі, схеми порівняння амплітуд (СП), фільтри (підсилювачі) сигналів похибок та виконавчі пристрої керування кутами азимуту і місця, яка відрізняється тим, що додатково після СПМ...
Ультразвуковий частотно-часовий витратомір
Номер патенту: 17353
Опубліковано: 29.12.1999
Автори: Пугачьов Ігорь Сємьоновіч, Мухарскій Алєксандр Матвєєвіч, Шєстаков Леонід Владіміровіч, Романов Анатолій Філіповіч
МПК: G01F 1/66
Мітки: частотно-часовий, ультразвуковий, витратомір
Формула / Реферат:
Ультразвуковой частотно-временной расходомер, содержащий два приемоизлучающих преобразователя, первый коммутатор, выход которого соединен с последовательно соединенными усилителем, амплитудным селектором и временным селектором, второй коммутатор, соединенный с формирователем зондирующего сигнала, вход которого соединен с первым выходом распределителя тактов, второй выход которого соединен с управляющими входами первого, второго и третьего...
Попередній патент: Спосіб лікування жінок, які страждають на непліддя імунного генезу
Наступний патент: Спосіб діагностики психомоторних порушень
Випадковий патент: Спосіб нормалізації тканинного обміну та відновлення морфофункціонального стану органів і тканин