Заспокоювач хитавиці
Номер патенту: 61024
Опубліковано: 11.07.2011
Автори: Гайша Олена Олександрівна, Гайша Олександр Олександрович
Формула / Реферат
Заспокоювач хитавиці, що містить модулі з трубопроводами, в верхній частині яких виконано вхідний отвір, оснащений регульованою заслінкою, після якої у кожному трубопроводі встановлено нагнітаючі пристрої, який відрізняється тим, що модулі навішені на корпус судна і закріплені у визначених місцях, а після нагнітаючого пристрою у кожному трубопроводі виконано отвір із регульованою заслінкою, розміщений нижче ватерлінії, а після отвору кожен трубопровід закінчується вихідним отвором у днищі модуля, оснащеним регульованою заслінкою, причому регульовані заслінки, нагнітаючий пристрій, датчики кута диференту, датчики механічних зусиль, які встановлені у характерних точках корпусу судна, зокрема на бульбі, датчики механічного тиску у трубопроводах підключені до ЕОМ з відповідною програмою.
Текст
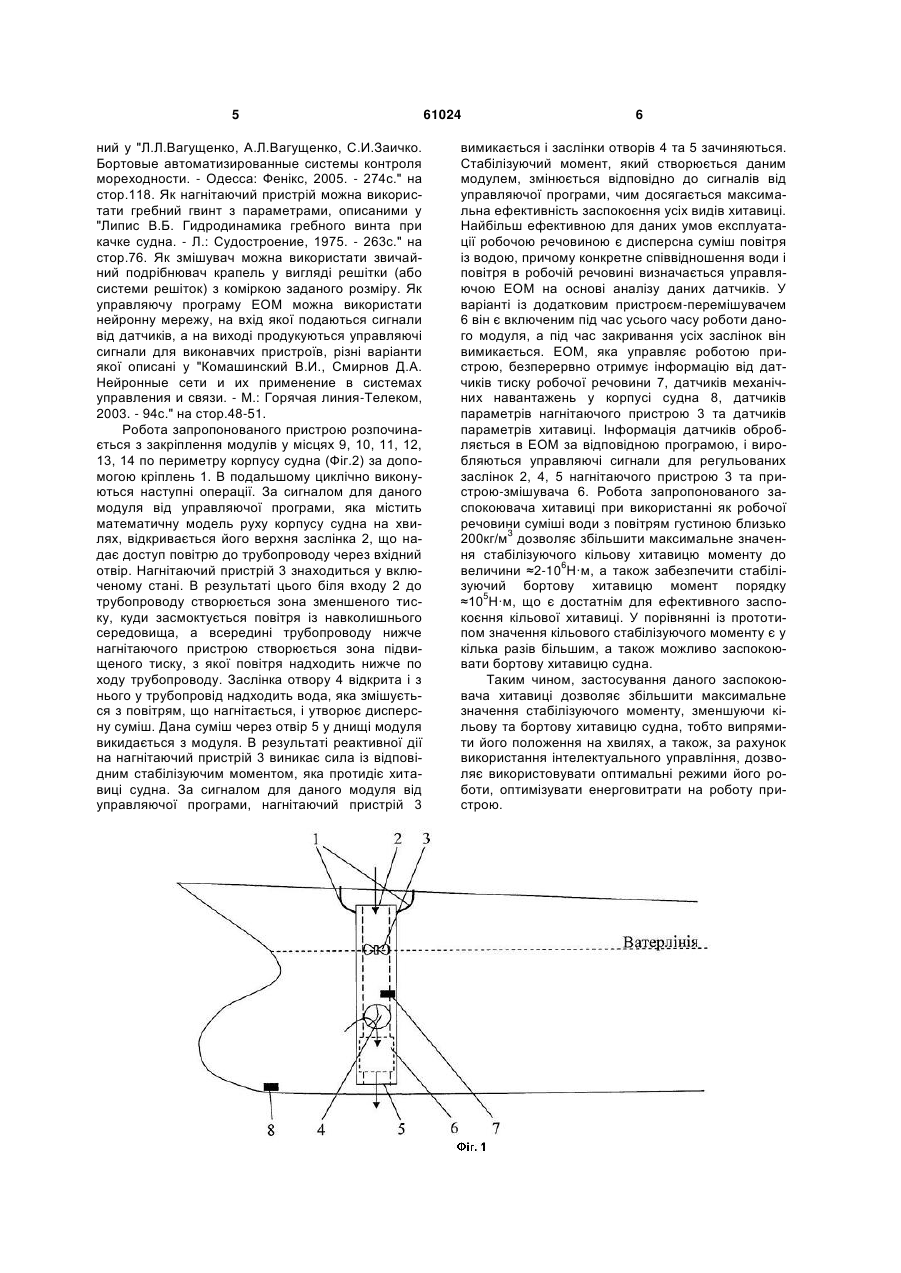
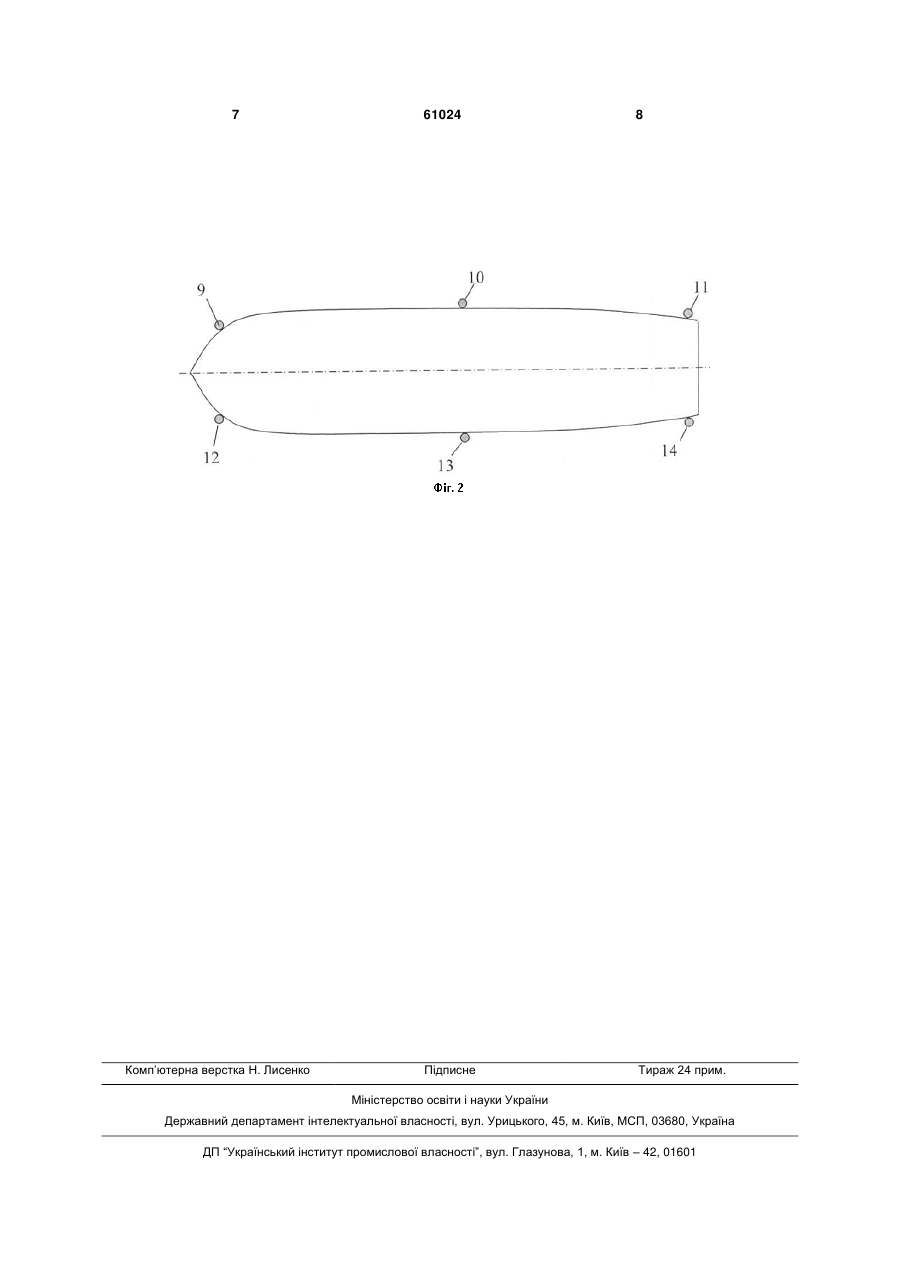
Заспокоювач хитавиці, що містить модулі з трубопроводами, в верхній частині яких виконано вхідний отвір, оснащений регульованою заслінкою, після якої у кожному трубопроводі встановлено нагнітаючі пристрої, який відрізняється тим, що 3 судна нижче ватерлінії (Патент RU 2301172, МПК7 В63В39/06, 02.02.2006). Ефективність роботи описаного пристрою є невисокою, оскільки використовується в основному енергія потоків води (пасивний ефект демпфірування). Найбільш близьким за своєю суттю є заспокоювач хитавиці, що містить розташовані в передній частині судна попарно і симетрично відносно діаметральної площини судна модулі з трубопроводами, причому вхідний отвір кожного трубопроводу оснащений регульованою заслінкою і розміщений у верхній частині борта або безпосередньо на верхній палубі судна. Після заслінки у кожному трубопроводі встановлено нагнітаючий пристрій, після якого в кожному трубопроводі виконано перше відгалуження, яке закінчується отвором з регульованою заслінкою, розміщеним вище ватерлінії. Наступне друге відгалуження закінчується отвором з регульованою заслінкою, розміщеним нижче ватерлінії. Після другого відгалуження трубопровід закінчується вихідним отвором у днищі судна, оснащеним регульованою заслінкою. Також заспокоювач включає датчики кута диференту, датчики механічних зусиль, які встановлені у характерних точках передньої частини судна, зокрема на бульбі, а також датчики механічного тиску у трубопроводах, підключені до ЕОМ з відповідною програмою. Ефективність заспокоєння хитавиці у цьому заспокоювачі збільшена за рахунок впровадження активних насосів, що нагнітають протидіючі хитавиці потоки води та (або) повітря (Патент на корисну модель України №42830, МПК7 В63В39/06, 27.07.2009). Зважаючи на ідентичність принципу роботи пристрою з пропозицією, а саме, використання потоків (водно-повітряної суміші) для створення стабілізуючого моменту, даний пристрій вибирається за прототип. В основу корисної моделі поставлено задачу удосконалення заспокоювача хитавиці, в якому трубопроводи з активними нагнітаючими пристроями розміщені у кількох характерних точках по периметру борту судна, чим забезпечується можливість створення не тільки поздовжнього, а й поперечного стабілізуючого моменту, і, як наслідок, зменшення не тільки поздовжньої кільової, а й поперечної бортової та вертикальної хитавиці судна. Також пропонується винести усю конструкцію в окремий пристрій у вигляді зовнішнього трубопроводу, і зробити цей пристрій навісним з можливістю його прибирання при непотрібності. Розміщення трубопроводів не тільки у передній, а й у задній частині судна, дозволяє збільшити стабілізуючий момент, який зменшує кільову хитавицю, приблизно вдвічі, так як у прототипі ефективна робота заспокоювача забезпечується тільки на одній половині періоду хитавиці, а у пропонованому рішенні - на всьому періоді. Отже, стабілізуючий поздовжній момент для судна середньої довжини складатиме близько 2МН·м проти 1МН·м у прототипі. Крім кількісного збільшення поздовжнього стабілізуючого моменту, використання активного нагнітання по всьому периметру судна дозволяє внести якісне покращення, а саме асинхронно управляти нагнітаючими пристроями по правому та лівому бортах, а це дозволяє про 61024 4 тидіяти і бортовій хитавиці судна. У прототипі також можлива асинхронна робота трубопроводів, встановлених лише в носовій частині, однак при цьому виникає завалювання корпусу по діагоналі і виникнення складних коливань навколо прямої "ніс-корма". Використання суміші води з повітрям замість води дозволяє зменшити динамічне навантаження не лише на днище при слемінгу в носовій частині як у прототипі, а і навантаження на усю обшивку корпусу по периметру судна в районах встановлення трубопроводів. Також у прототипі пропонується трубопровід із усіма заслінками, нагнітаючим пристроєм (тобто всю конструкцію) розміщувати у корпусі судна, а для цього необхідно у нових суднах передбачити відповідно місце під дану систему, а у існуючих суден іноді треба вносити значні переробки у конструкцію носової частини. Щоб позбутися цього недоліку та, зважаючи на порівняно невеликі розміри всього пристрою (габаритні розміри всієї системи близько 1,5м×1,5м×6м), пропонується виконати його у вигляді окремого модульного пристрою, який у разі необхідності може навішуватися на корпус судна у визначених місцях по периметру борта судна. На рисунках показано схему розташування основних елементів пристрою у передній частині судна: Фіг.1 - загальна схема розташування елементів одного модуля заспокоювача, Фіг.2 - схема розташування навісних модулів заспокоювача по периметру судна. Модулі можуть закріплюватися у довільних точках по периметру судна за допомогою спеціальних кріплень 1 і всі мають однакову конструкцію. Вхід трубопроводу 2 розташований у верхній частині модуля і обладнаний регульованою заслінкою. Після заслінки трубопровід містить нагнітаючий пристрій 3. Після нагнітаючого пристрою у трубопроводі нижче ватерлінії міститься отвір 4, обладнаний регульованою заслінкою. Після отвору 4 трубопровід закінчується вихідним отвором 5 у днищі модуля із регульованою заслінкою. Як варіант, можливе встановлення між отвором 4 та вихідним отвором 5 додаткового пристроюзмішувача 6. Роботою усіх регульованих заслінок в отворах 2, 4, 5, нагнітаючого пристрою 3 та змішувача 6 управляє ЕОМ, до якої підключені датчики тиску робочої речовини 7, розміщені у трубопроводі, датчики механічних навантажень у корпусі судна 8, розміщені на днищевій поверхні передньої частини судна, датчик параметрів нагнітаючого пристрою 3 та датчик параметрів хитавиці. Місця встановлення модулів: 9, 10, 11, 12, 13, 14 розташовані симетрично відносно діаметральної площини (наприклад, як на Фіг.2). Як датчик параметрів хитавиці можна застосувати комбінований датчик "S-108" (фірма SMC, Швеція). Датчик механічних навантажень у корпусі судна - наприклад, судновий тензодатчик SBSG. Датчик тиску робочої речовини - наприклад, описаний у "Л.Л.Вагущенко, А.Л.Вагущенко, С.И.Заичко. Бортовые автоматизированные системы контроля мореходности. - Одесса: Фенікс, 2005. - 274с." на стор.122. Датчик параметрів нагнітаючого пристрою - наприклад, датчик, описа 5 ний у "Л.Л.Вагущенко, А.Л.Вагущенко, С.И.Заичко. Бортовые автоматизированные системы контроля мореходности. - Одесса: Фенікс, 2005. - 274с." на стор.118. Як нагнітаючий пристрій можна використати гребний гвинт з параметрами, описаними у "Липис В.Б. Гидродинамика гребного винта при качке судна. - Л.: Судостроение, 1975. - 263с." на стор.76. Як змішувач можна використати звичайний подрібнювач крапель у вигляді решітки (або системи решіток) з коміркою заданого розміру. Як управляючу програму ЕОМ можна використати нейронну мережу, на вхід якої подаються сигнали від датчиків, а на виході продукуються управляючі сигнали для виконавчих пристроїв, різні варіанти якої описані у "Комашинский В.И., Смирнов Д.А. Нейронные сети и их применение в системах управления и связи. - М.: Горячая линия-Телеком, 2003. - 94с." на стор.48-51. Робота запропонованого пристрою розпочинається з закріплення модулів у місцях 9, 10, 11, 12, 13, 14 по периметру корпусу судна (Фіг.2) за допомогою кріплень 1. В подальшому циклічно виконуються наступні операції. За сигналом для даного модуля від управляючої програми, яка містить математичну модель руху корпусу судна на хвилях, відкривається його верхня заслінка 2, що надає доступ повітрю до трубопроводу через вхідний отвір. Нагнітаючий пристрій 3 знаходиться у включеному стані. В результаті цього біля входу 2 до трубопроводу створюється зона зменшеного тиску, куди засмоктується повітря із навколишнього середовища, а всередині трубопроводу нижче нагнітаючого пристрою створюється зона підвищеного тиску, з якої повітря надходить нижче по ходу трубопроводу. Заслінка отвору 4 відкрита і з нього у трубопровід надходить вода, яка змішується з повітрям, що нагнітається, і утворює дисперсну суміш. Дана суміш через отвір 5 у днищі модуля викидається з модуля. В результаті реактивної дії на нагнітаючий пристрій 3 виникає сила із відповідним стабілізуючим моментом, яка протидіє хитавиці судна. За сигналом для даного модуля від управляючої програми, нагнітаючий пристрій 3 61024 6 вимикається і заслінки отворів 4 та 5 зачиняються. Стабілізуючий момент, який створюється даним модулем, змінюється відповідно до сигналів від управляючої програми, чим досягається максимальна ефективність заспокоєння усіх видів хитавиці. Найбільш ефективною для даних умов експлуатації робочою речовиною є дисперсна суміш повітря із водою, причому конкретне співвідношення води і повітря в робочій речовині визначається управляючою ЕОМ на основі аналізу даних датчиків. У варіанті із додатковим пристроєм-перемішувачем 6 він є включеним під час усього часу роботи даного модуля, а під час закривання усіх заслінок він вимикається. ЕОМ, яка управляє роботою пристрою, безперервно отримує інформацію від датчиків тиску робочої речовини 7, датчиків механічних навантажень у корпусі судна 8, датчиків параметрів нагнітаючого пристрою 3 та датчиків параметрів хитавиці. Інформація датчиків обробляється в ЕОМ за відповідною програмою, і виробляються управляючі сигнали для регульованих заслінок 2, 4, 5 нагнітаючого пристрою 3 та пристрою-змішувача 6. Робота запропонованого заспокоювача хитавиці при використанні як робочої речовини суміші води з повітрям густиною близько 3 200кг/м дозволяє збільшити максимальне значення стабілізуючого кільову хитавицю моменту до 6 величини ≈2-10 Н·м, а також забезпечити стабілізуючий бортову хитавицю момент порядку 5 ≈10 Н·м, що є достатнім для ефективного заспокоєння кільової хитавиці. У порівнянні із прототипом значення кільового стабілізуючого моменту є у кілька разів більшим, а також можливо заспокоювати бортову хитавицю судна. Таким чином, застосування даного заспокоювача хитавиці дозволяє збільшити максимальне значення стабілізуючого моменту, зменшуючи кільову та бортову хитавицю судна, тобто випрямити його положення на хвилях, а також, за рахунок використання інтелектуального управління, дозволяє використовувати оптимальні режими його роботи, оптимізувати енерговитрати на роботу пристрою. 7 Комп’ютерна верстка Н. Лиcенко 61024 8 Підписне Тираж 24 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюShip stabilizer
Автори англійськоюHaisha Oleksandr Oleksandrovych, Haisha Olena Oleksandrivna
Назва патенту російськоюУспокоитель качки
Автори російськоюГайша Александр Александрович, Гайша Елена Александровна
МПК / Мітки
МПК: B63B 39/00
Мітки: заспокоювач, хитавиці
Код посилання
<a href="https://ua.patents.su/4-61024-zaspokoyuvach-khitavici.html" target="_blank" rel="follow" title="База патентів України">Заспокоювач хитавиці</a>
Заспокоювач хитавиці

Номер патенту: 42830
Опубліковано: 27.07.2009
Автори: Гайша Олена Олександрівна, Гайша Олександр Олександрович
МПК: B63B 39/00
Мітки: заспокоювач, хитавиці
Формула / Реферат:
1. Заспокоювач хитавиці, що містить розташовані в передній частині судна попарно і симетрично відносно діаметральної площини судна модулі з трубопроводами, який відрізняється тим, що вхідний отвір кожного трубопроводу оснащений регульованою заслінкою і розміщений у верхній частині борту або безпосередньо на верхній палубі судна, після заслінки у кожному трубопроводі встановлено нагнітаючий пристрій, після якого в кожному трубопроводі виконано...
Заспокоювач хитавиці судна
Номер патенту: 69930
Опубліковано: 15.09.2004
Автори: Хільський В'ячеслав Петрович, Казакевіч Андрей В'ячеслав, Чорний Анатолій Петрович
МПК: B63B 39/00
Мітки: заспокоювач, хитавиці, судна
Формула / Реферат:
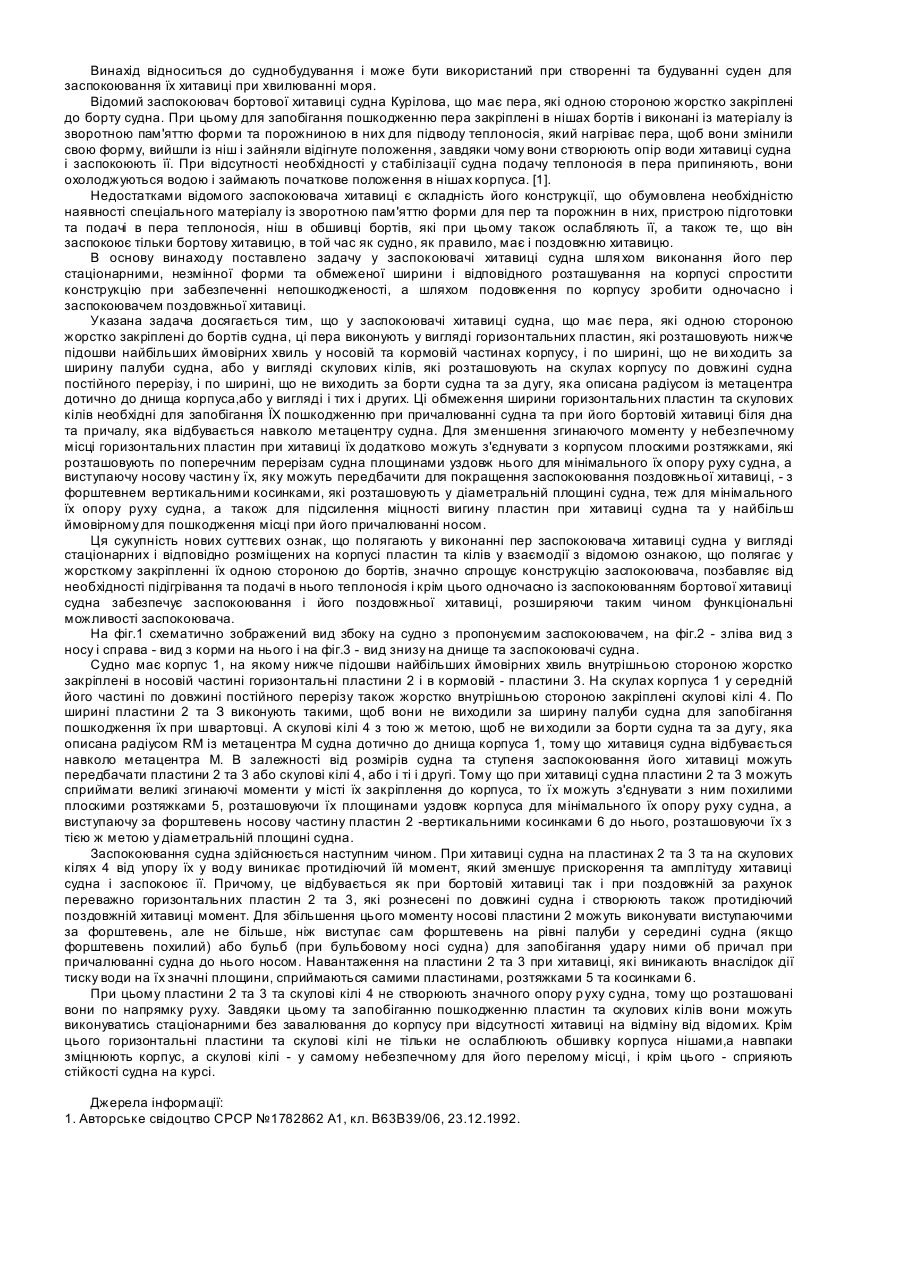
1. Заспокоювач хитавиці судна, що має пера, які одною стороною жорстко закріплені до бортів судна, який відрізняється тим, що його пера виконані у вигляді горизонтальних пластин, які розташовані нижче підошви найбільших ймовірних хвиль у носовій та кормовій частинах корпусу, і мають ширину, що не виходить за ширину палуби судна, або у вигляді скулових кілів, які розташовані на скулах корпусу по довжині судна постійного перерізу, і мають...
Пасивний заспокоювач бортової хитавиці судна
Номер патенту: 69929
Опубліковано: 15.09.2004
Автори: Климов Віктор Михайлович, Казакевіч Андрей В'ячеслав, Хільський В'ячеслав Петрович, Чорний Анатолій Петрович, Галушко Леонтій Олексійович
МПК: B63B 39/00
Мітки: судна, бортової, пасивний, хитавиці, заспокоювач
Формула / Реферат:
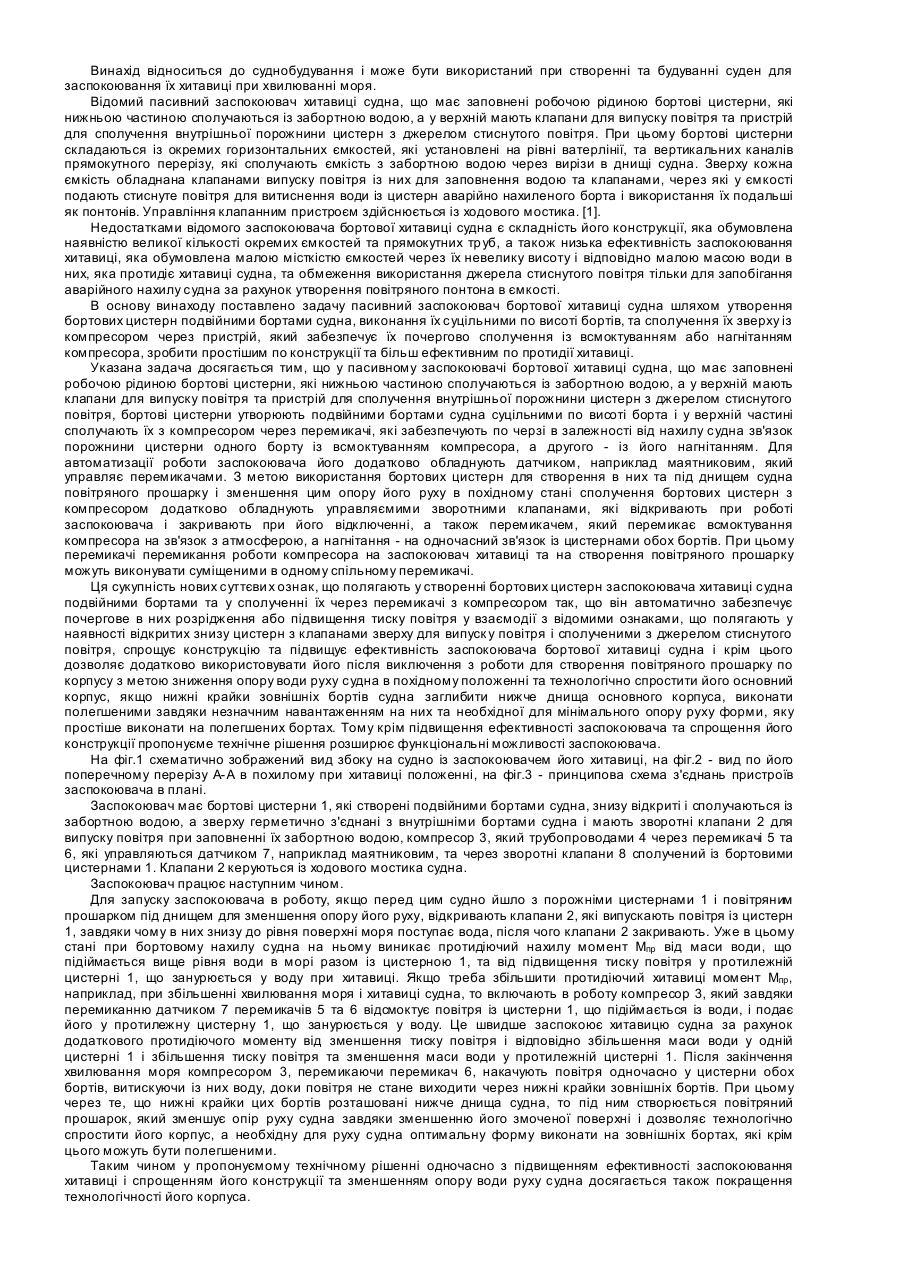
1. Пасивний заспокоювач бортової хитавиці судна, що містить заповнені робочою рідиною бортові цистерни, які нижньою частиною сполучаються із забортною водою, а у верхній мають клапани для випуску повітря, та пристрій для сполучення внутрішньої порожнини цистерн з джерелом стиснутого повітря, який відрізняється тим, що бортові цистерни утворені подвійними бортами судна суцільними по висоті і у верхній частині сполучені з компресором через...
Пристрій, що підвищує бічний опір силі дрейфу вітрильного судна (олександрівський шверт)
Номер патенту: 16423
Опубліковано: 15.08.2006
Автор: Малоголовка Олександр Андрійович
МПК: B63B 39/00
Мітки: олександрівський, підвищує, вітрильного, опір, пристрій, шверт, сили, бічний, судна, дрейфу
Формула / Реферат:
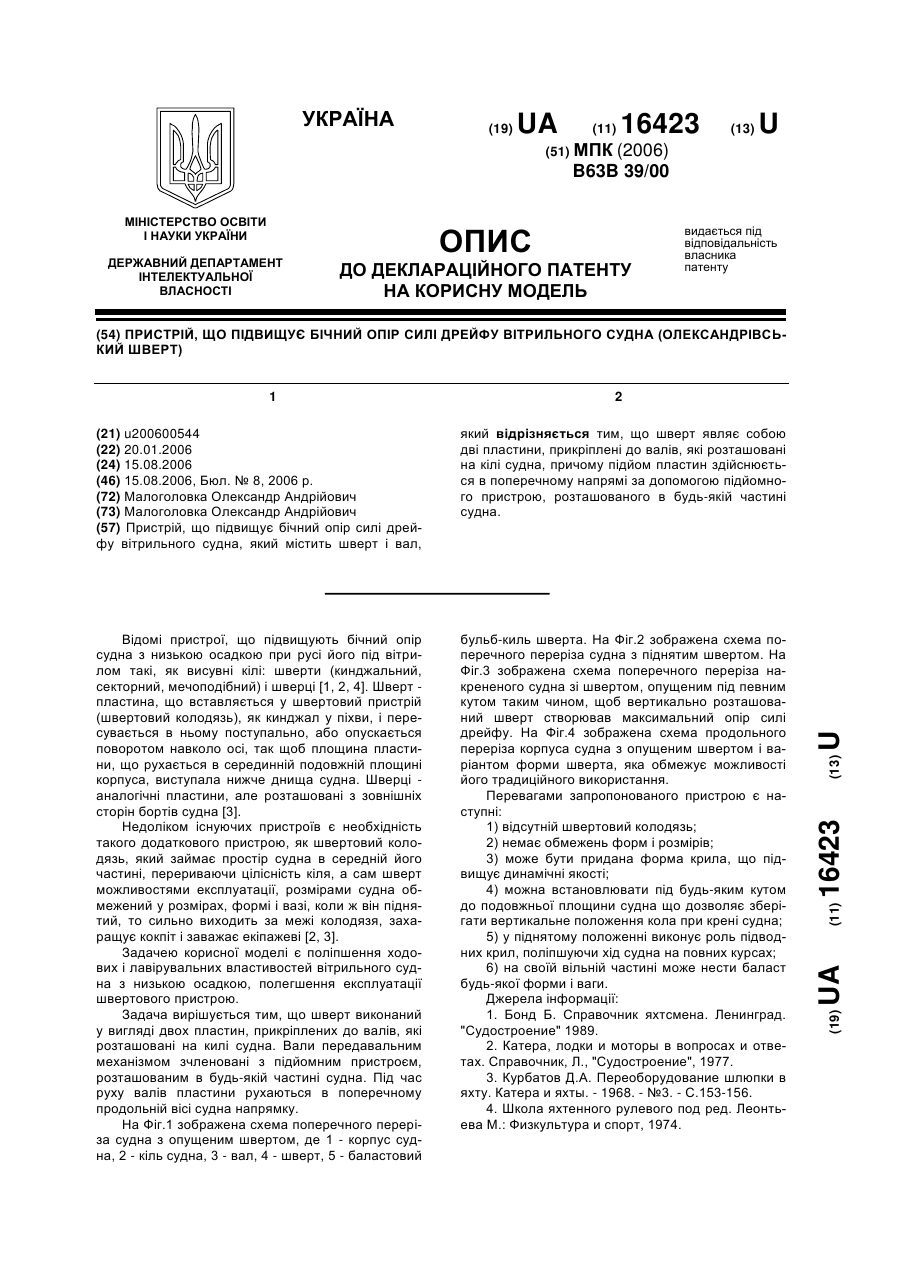
Пристрій, що підвищує бічний опір силі дрейфу вітрильного судна, який містить шверт і вал, який відрізняється тим, що шверт являє собою дві пластини, прикріплені до валів, які розташовані на кілі судна, причому підйом пластин здійснюється в поперечному напрямі за допомогою підйомного пристрою, розташованого в будь-якій частині судна.
Пристрій, що підвищує бічний опір силі дрейфу вітрильного судна (проскурівський шверт)
Номер патенту: 16422
Опубліковано: 15.08.2006
Автор: Малоголовка Олександр Андрійович
МПК: B63B 39/00
Мітки: підвищує, пристрій, шверт, вітрильного, бічний, сили, проскурівський, опір, дрейфу, судна
Формула / Реферат:
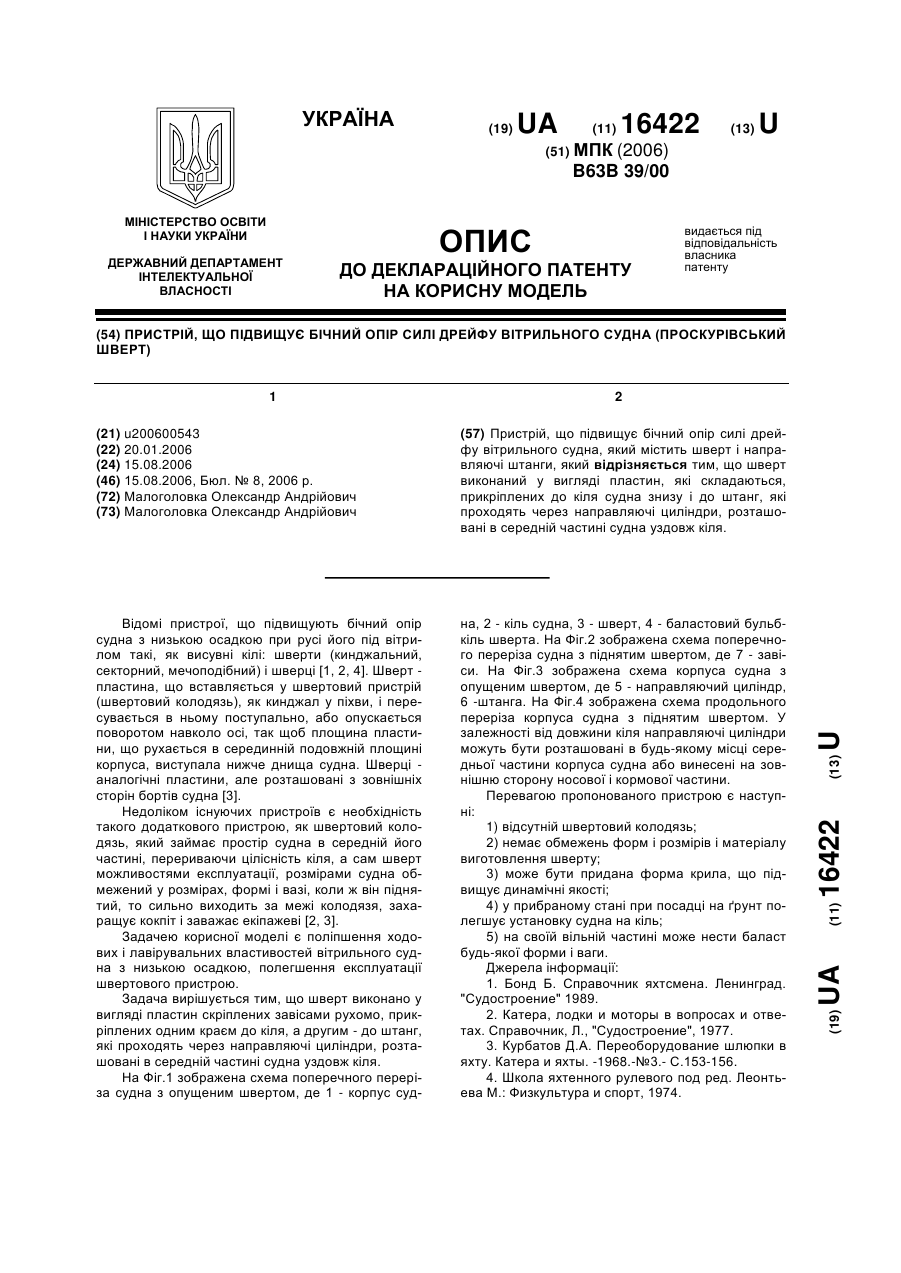
Пристрій, що підвищує бічний опір силі дрейфу вітрильного судна, який містить шверт і направляючі штанги, який відрізняється тим, що шверт виконаний у вигляді пластин, які складаються, прикріплених до кіля судна знизу і до штанг, які проходять через направляючі циліндри, розташовані в середній частині судна уздовж кіля.
Попередній патент: Установка для термічного знешкодження отрутохімікатів
Наступний патент: Протиударний амортизатор
Випадковий патент: Спосіб прогнозування прогресування діабетичної ретинопатії