Спосіб визначення моменту трифазного асинхронного двигуна з короткозамкненим ротором
Номер патенту: 61511
Опубліковано: 25.07.2011

Формула / Реферат
Спосіб визначення моменту трифазного асинхронного двигуна з короткозамкненим ротором, який полягає в тому, що визначення моменту трифазного асинхронного двигуна відбувається за електричними координатами двигуна, що визначаються датчиками (фазні напруги статора UА, UВ, UС та фазні струми іА, іВ, іС), момент обчислюється у мікроконтролері та подається на керуючий елемент, який відрізняється тим, що створюється математична модель трифазного асинхронного двигуна з короткозамкненим ротором, яка складається з системи рівнянь в трифазних струмах та потокозчепленнях в системі координат α - β (2):
де ![]() ,
, ![]() ,
, ![]() - струм статора в фазах А, В, С відповідно;
- струм статора в фазах А, В, С відповідно;
![]() ,
, ![]() ,
, ![]() - напруги статора в фазах А, В, С відповідно;
- напруги статора в фазах А, В, С відповідно;
![]() ,
, ![]() - індуктивний та активний опір статора відповідно;
- індуктивний та активний опір статора відповідно;
![]() - кількість пар полюсів;
- кількість пар полюсів;
![]() - індуктивність розсіювання;
- індуктивність розсіювання;
![]() ,
, ![]() - проекції потокозчеплення ротора на координатні вісі α - β;
- проекції потокозчеплення ротора на координатні вісі α - β;
![]() ,
, ![]() - проекції потокозчеплення статора на координатні вісі α - β,
- проекції потокозчеплення статора на координатні вісі α - β,
тоді момент визначається як
Текст
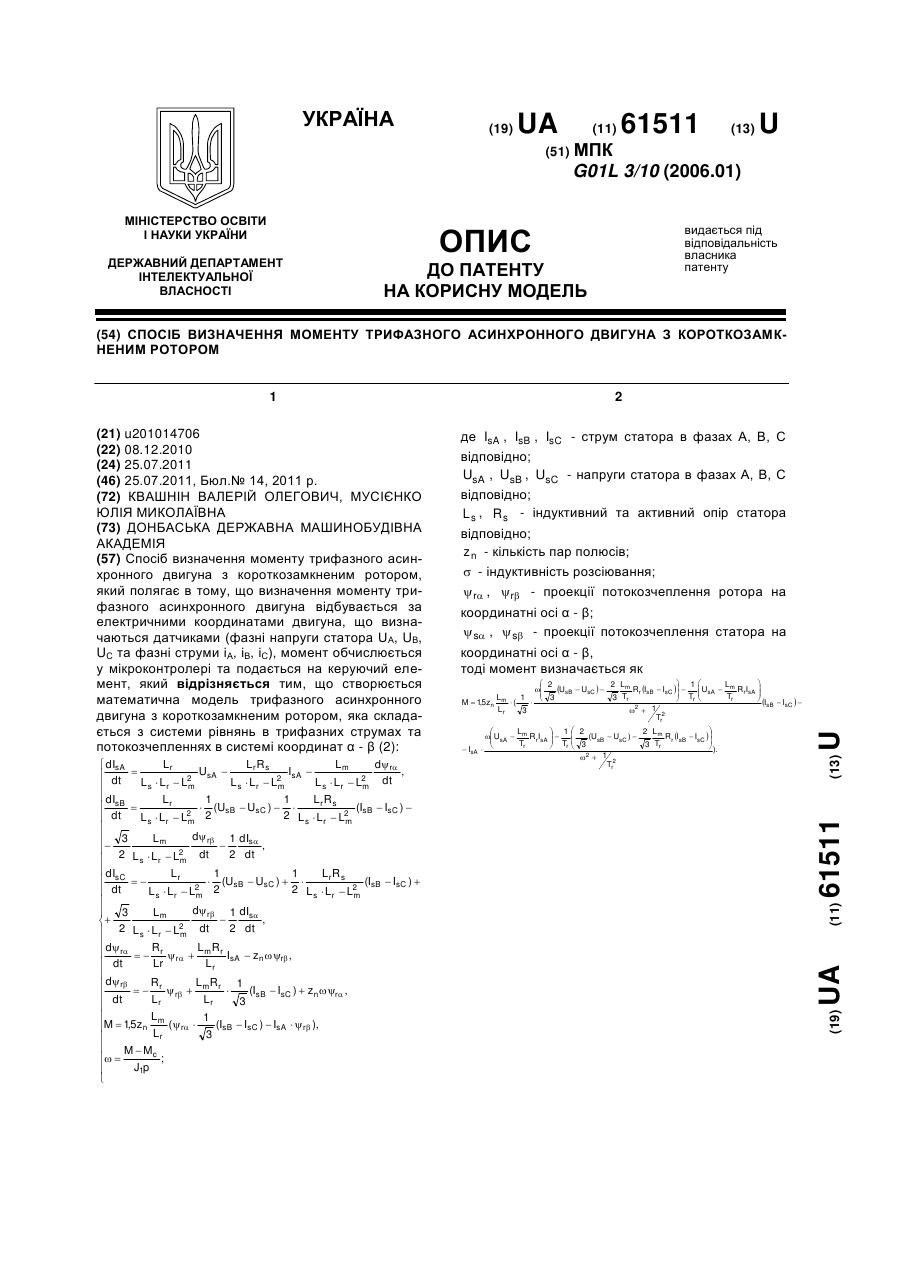
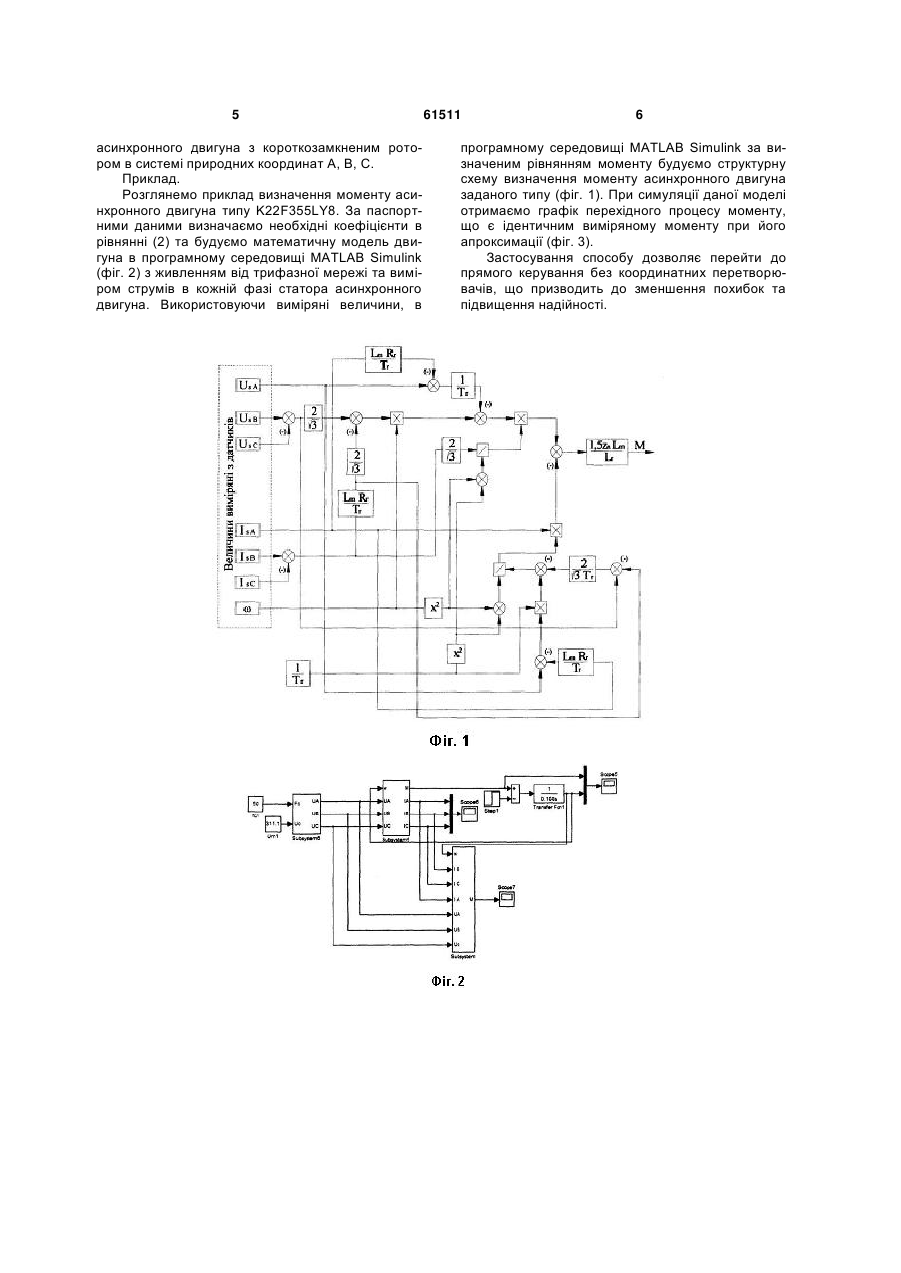
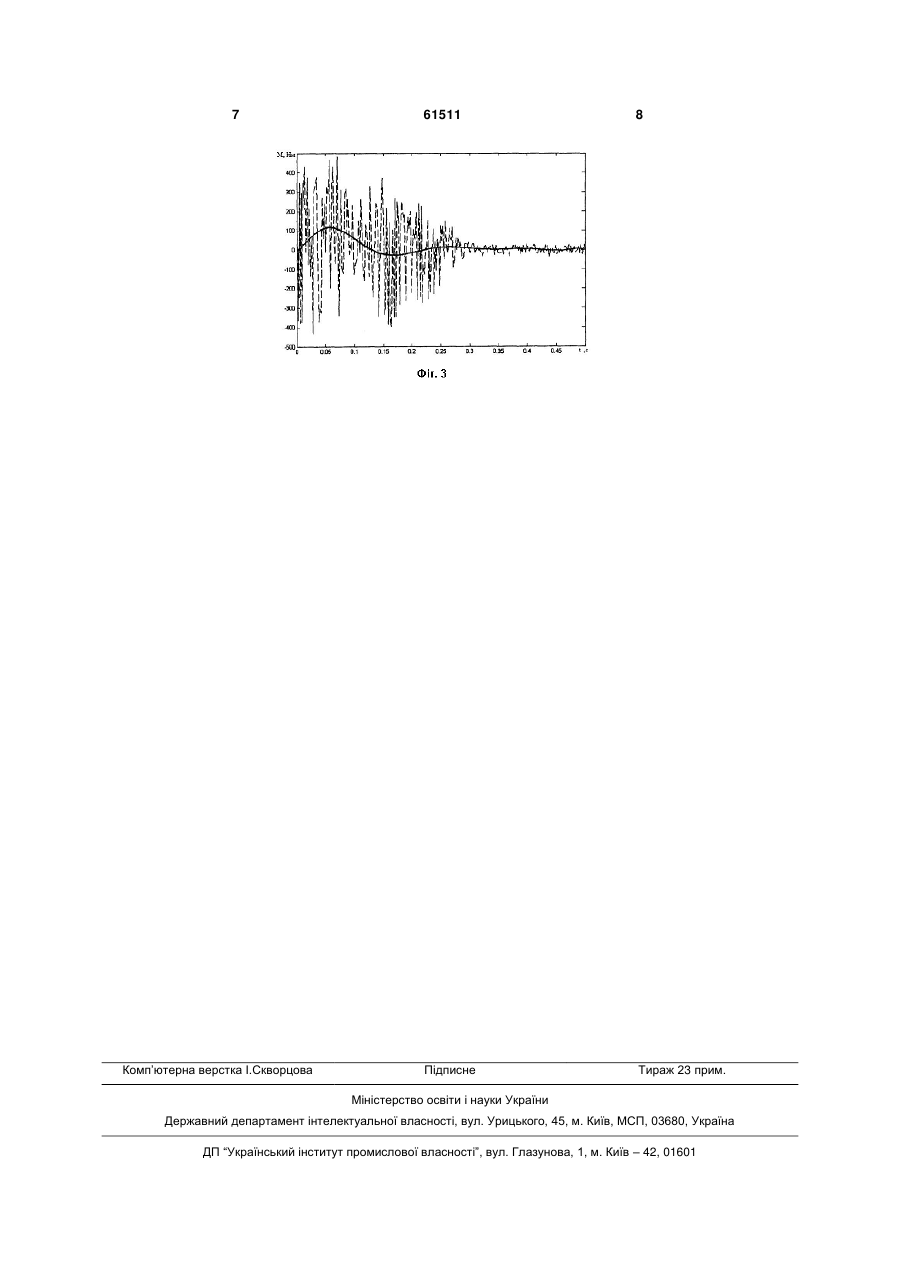
Спосіб визначення моменту трифазного асинхронного двигуна з короткозамкненим ротором, який полягає в тому, що визначення моменту трифазного асинхронного двигуна відбувається за електричними координатами двигуна, що визначаються датчиками (фазні напруги статора UА, UВ, UС та фазні струми іА, іВ, іС), момент обчислюється у мікроконтролері та подається на керуючий елемент, який відрізняється тим, що створюється математична модель трифазного асинхронного двигуна з короткозамкненим ротором, яка складається з системи рівнянь в трифазних струмах та потокозчепленнях в системі координат α - β (2): 2 3 61511 Корисна модель належить до галузі техніки, а саме до асинхронних двигунів з короткозамкненим ротором і може знайти застосування при розробці нових систем керування. Відомим способом вимірювання є структурна схема асинхронного двигуна в просторових векторах струму статора і потокозчеплення ротора [Колб Ант.А., Колб А.А. Теория электропривода: Учебное пособие. - Д., Национальный горный университет, 2006. - с. 184, рис. 4.31]. Найбільш близьким аналогом способу, що заявляється, вибраним як прототип, є спосіб визначення моменту, який полягає в тому, що визначення моменту трифазного асинхронного двигуна відбувається за електричними координатами двигуна, які визначаються датчиками (фазні напруги статора UА, UВ, UС та фазні струми іА, іВ, іС) обчислюються еквівалентні складові вектора напруги Usα, Usβ та вектора струму isα, isβ в нерухомій відносно статора двигуна системі координат (α β), момент обчислюється у мікроконтролері та подається на керуючий елемент й визначається як 3 Lm zn М r s r s 2 L sL r , де L s , Lr - індуктивний опір статора та ротора відповідно; z n - кількість пар полюсів; - індуктивність розсіювання; r ; r - проекції потокозчеплення ротора на координатні вісі α - β; s ; s - проекції потокозчеплення статора на координатні вісі α - β [Козярук А.Е., Рудаков В. В. Современное и перспективное алгоритмическое обеспечение частотно-регулируемых электроприводов - Санкт-Петербург, 2004. - С. 26,31, рис. 7]. Загальними суттєвими ознаками відомого способу й того, що заявляється є визначення моменту трифазного асинхронного двигуна, що відбувається за електричними координатами двигуна, які визначаються датчиками (фазні напруги статора UА, UВ, UС та фазні струми і А, іВ, іС), обчислюється момент у мікроконтролері та подається на керуючий елемент. Недоліками цього способу визначення моменту трифазного асинхронного двигуна з короткозамкненим ротором є необхідність використовувати переходи з системи природних координатних осей до двокоординатної системи для визначення обертового моменту. В основу корисної моделі поставлена задача удосконалення визначення моменту асинхронного двигуна з короткозамкненим ротором через вимірювання струмів у кожній фазі статора без використання додаткових перетворювачів координат. Поставлена задача вирішується за рахунок обчислення моменту в мікроконтролері за вхідними параметрами: виміряними електричними координатами двигуна, що визначаються датчиками (фазні напруги статора UА, UВ, UС та фазні струми 4 статора іА, іВ, іС кутова швидкість) та обчисленими параметрами двигуна (індуктивним та активним опорами статора та ротора). Створюється математична модель трифазного асинхронного двигуна з короткозамкненим ротором, що складається з системи рівнянь в трифазних струмах та потокозчепленнях в системі координат α - β (2): LrR s d r Lr Lm dIsA UsA IsA , dt L s L r L2 L s L r L2 L s L r L2 dt m m m dI LrR s Lr 1 1 (UsB UsC ) (IsB IsC ) sB 2 L s L r L2 L s L r L2 2 dt m m d r 1 dIs Lm 3 , 2 2 dt L s L r L2 dt m dIsC LrR s Lr 1 1 (UsB UsC ) (IsB IsC ) 2 L s L r L2 L s L r L2 2 dt m m d r 1 dIs Lm 3 , 2 L s L r L2 dt 2 dt m d r Rr r L mRr IsA z n r , Lr Lr dt d r Rr L mRr 1 (I I ) z , r sB sC n r dt Lr Lr 3 Lm 1 (IsB IsC ) IsA r ), M 1,5z n L ( r 3 r M Mc ; J1p де IsA , IsB , IsC - струм статора в фазах А, В, С відповідно; UsA , UsB , UsC - напруги статора в фазах А, В, С відповідно; L s , R s - індуктивний та активний опір статора відповідно; z n - кількість пар полюсів; - індуктивність розсіювання; r r , - проекції потокозчеплення ротора на координатні вісі α - β; s , s - проекції потокозчеплення статора на координатні вісі α - β. Тоді момент визначається як M 1,5z n IsA 2 1 Lm 2 Lm 3 UsB UsC 3 T Rr IsB IsC T UsA T RrIsA Lm 1 r r r IsB IsC ( 2 Lr 1 2 3 Tr 1 2 L 2 Lm UsA m RrIsA (UsB UsC ) Rr IsB IsC T Tr 3 Tr r 3 ). 2 1 2 Tr Суть корисної моделі пояснюється кресленнями, де показано: - фіг. 1 - структурна схема визначення моменту асинхронного двигуна; - фіг. 2 - математична модель асинхронний двигуна для визначення моменту в програмному середовищі MATLAB Simulink; - фіг. 3 - графік моменту двигуна та його апроксимація. Запропонований спосіб визначає момент 5 асинхронного двигуна з короткозамкненим ротором в системі природних координат А, В, С. Приклад. Розглянемо приклад визначення моменту асинхронного двигуна типу K22F355LY8. За паспортними даними визначаємо необхідні коефіцієнти в рівнянні (2) та будуємо математичну модель двигуна в програмному середовищі MATLAB Simulink (фіг. 2) з живленням від трифазної мережі та виміром струмів в кожній фазі статора асинхронного двигуна. Використовуючи виміряні величини, в 61511 6 програмному середовищі MATLAB Simulink за визначеним рівнянням моменту будуємо структурну схему визначення моменту асинхронного двигуна заданого типу (фіг. 1). При симуляції даної моделі отримаємо графік перехідного процесу моменту, що є ідентичним виміряному моменту при його апроксимації (фіг. 3). Застосування способу дозволяє перейти до прямого керування без координатних перетворювачів, що призводить до зменшення похибок та підвищення надійності. 7 Комп’ютерна верстка І.Скворцова 61511 8 Підписне Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determination of torque of three-phase cage motor with short-circuited rotor
Автори англійськоюKvashnin Valerii Olehovych, Musienko Yulia Mykolaivna
Назва патенту російськоюСпособ определения момента трехфазного асинхронного двигателя с короткозамкнутым ротором
Автори російськоюКвашнин Валерий Олегович, Мусиенко Юлия Николаевна
МПК / Мітки
МПК: G01L 3/10
Мітки: спосіб, ротором, двигуна, визначення, асинхронного, короткозамкненим, трифазного, моменту
Код посилання
<a href="https://ua.patents.su/4-61511-sposib-viznachennya-momentu-trifaznogo-asinkhronnogo-dviguna-z-korotkozamknenim-rotorom.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення моменту трифазного асинхронного двигуна з короткозамкненим ротором</a>
Пристрій для пуску асинхронного двигуна з короткозамкненим ротором
Номер патенту: 21409
Опубліковано: 15.03.2007
Автори: Донченко Роман Миколайович, Шульга Олег Васильович, Некрасов Андрій Вікторович, Решетняк Анатолій Володимирович
МПК: H02P 1/00
Мітки: короткозамкненим, ротором, пуску, пристрій, двигуна, асинхронного
Формула / Реферат:
Пристрій для пуску асинхронного двигуна з короткозамкненим ротором, який живиться від трифазного індуктивно-ємнісного перетворювача з контролем процесу запуску у функції обертів, який відрізняється тим, що дроселі індуктивно-ємнісного перетворювача оснащені додатковими обмотками, які під час запуску асинхронного двигуна підключаються до мережі живлення.
Спосіб випробування асинхронного трифазного двигуна з короткозамкненим ротором та пристрій для його реалізації
Номер патенту: 62492
Опубліковано: 15.12.2003
Автори: Аміров Анатолій Мойсеєвич, Калінов Андрій Петрович, Тараненко Сергій Іванович, Чорний Олексій Петрович, Родькін Дмитро Йосипович, Мартиненко Віта Олександрівна
МПК: G01R 31/34
Мітки: трифазного, асинхронного, реалізації, короткозамкненим, випробування, ротором, пристрій, спосіб, двигуна
Формула / Реферат:
l. Спосіб випробування асинхронного трифазного двигуна з короткозамкненим ротором, який полягає в підключенні статора двигуна до трифазної симетричної мережі з регульованою напругою за допомогою симетричного трифазного регулятора напруги, зміні напруги від нуля до значення 0,1UH, при великих кутах регулювання перетворювача вимірюють струми і напруги в трьох фазах, визначають параметри схеми заміщення двигуна при ковзанні S=1,0:x1, x2, xµ,...
Спосіб захисту асинхронного електродвигуна з короткозамкненим ротором від теплового перевантаження
Номер патенту: 27710
Опубліковано: 12.11.2007
Автори: Ткаченко Сергій Миколайович, Сивокобиленко Віталій Федорович
МПК: G01R 31/34, H02K 15/00
Мітки: ротором, перевантаження, асинхронного, короткозамкненим, електродвигуна, теплового, захисту, спосіб
Формула / Реферат:
Спосіб захисту асинхронного електродвигуна з короткозамкненим ротором від теплового перевантаження, що включає безперервне вимірювання миттєвих значень фазних струмів і напруг, розрахунок температури нагріву обмоток статора і ротора, при перевищенні допустимих значень яких проводять відключення двигуна від живильної мережі, який відрізняється тим, що перед введенням в експлуатацію короткозамкненого асинхронного двигуна заздалегідь вимірюють...
Спосіб діагностики параметрів асинхронного двигуна з короткозамкненим ротором та пристрій для його здійснення
Номер патенту: 36060
Опубліковано: 16.04.2001
Автори: Сисюк Геннадій Юрійович, Чорний Олексій Петрович, Пасмурских Олександр Олексійович, Луговой Анатолій Васильович, Добрецов Володимир Валентинович, Долженко Віктор Володимирович, Вошун Олексій Миколайович, Родькін Дмитро Йосипович
МПК: G01R 31/34
Мітки: ротором, здійснення, спосіб, двигуна, асинхронного, параметрів, пристрій, короткозамкненим, діагностики
Формула / Реферат:
1. Спосіб діагностики параметрів асинхронного двигуна з короткозамкненим ротором, який полягає в підключенні статорних обмоток до однофазної мережі промислової частоти, вимірюванні напруги, струму та кута зсуву між ними, в відключенні статорних обмоток від мережі в момент переходу струму через нуль, вимірюванні залишкової напруги після відключення, який відрізняється тим, що в момент відключення вимірюють стрибок напруги на затискачах статора...
Спосіб захисту асинхронного електродвигуна з короткозамкненим ротором від теплового перевантаження
Номер патенту: 45151
Опубліковано: 26.10.2009
Автори: Сивокобиленко Віталій Федорович, Ткаченко Сергій Миколайович
МПК: H02K 15/00, G01R 31/34
Мітки: перевантаження, захисту, електродвигуна, короткозамкненим, ротором, спосіб, теплового, асинхронного
Формула / Реферат:
Спосіб захисту асинхронного електродвигуна з короткозамкненим ротором від теплового перевантаження, що включає попереднє визначення перед введенням в експлуатацію короткозамкненого асинхронного двигуна при відомій початковій температурі холодного стану машини опору обмоток статора, гілки намагнічування з досліду неробочого ходу і функціональних залежностей опору ротора від ковзання з дослідів подачі на статор трифазної напруги різної частоти...
Попередній патент: Спосіб отримання пластичних вугільних формовок
Наступний патент: Магнітний фільтр
Випадковий патент: Сцинтиляційний детектор, спосіб його збирання та пристрій для здійснення збирання сцинтиляційного детектора складання та пристрій для здійснення складання