Автоматична гармата з системою динамічної стабілізації
Номер патенту: 62049
Опубліковано: 15.12.2003
Автори: Стеценко Олександр Олексійович, Грек Володимир Григорович, Собков Анатолій Васильович, Кошелєв Володимир Іванович, Величко Юрій Іванович, Медвідь Володимир Станіславович, Солодковський Валерій Станіславович
Формула / Реферат
1. Автоматична гармата з системою динамічної стабілізації, що містить ствол з дульним гальмом, амортизатор, коробку ствольну, раму затворну з затвором та бойком, зворотну пружину, затильник з механізмом автоматичної перезарядки та електроспуском, яка відрізняється тим, що додатково містить систему стабілізуючих сопел, зв'язаних з стволом, які мають геометричні параметри, кут нахилу до осі і місце розташування, що забезпечують знаходження снаряда в стволі до початку витоку порохових газів через систему стабілізуючих сопел.
2. Автоматична гармата з системою динамічної стабілізації за п.1, яка відрізняється тим, що геометричні параметри сопел по периметру виконані не однаковими.
3. Автоматична гармата з системою динамічної стабілізації за пп.1, 2, яка відрізняється тим, що кут нахилу сопел до осі ствола виконаний не однаковим.
Текст
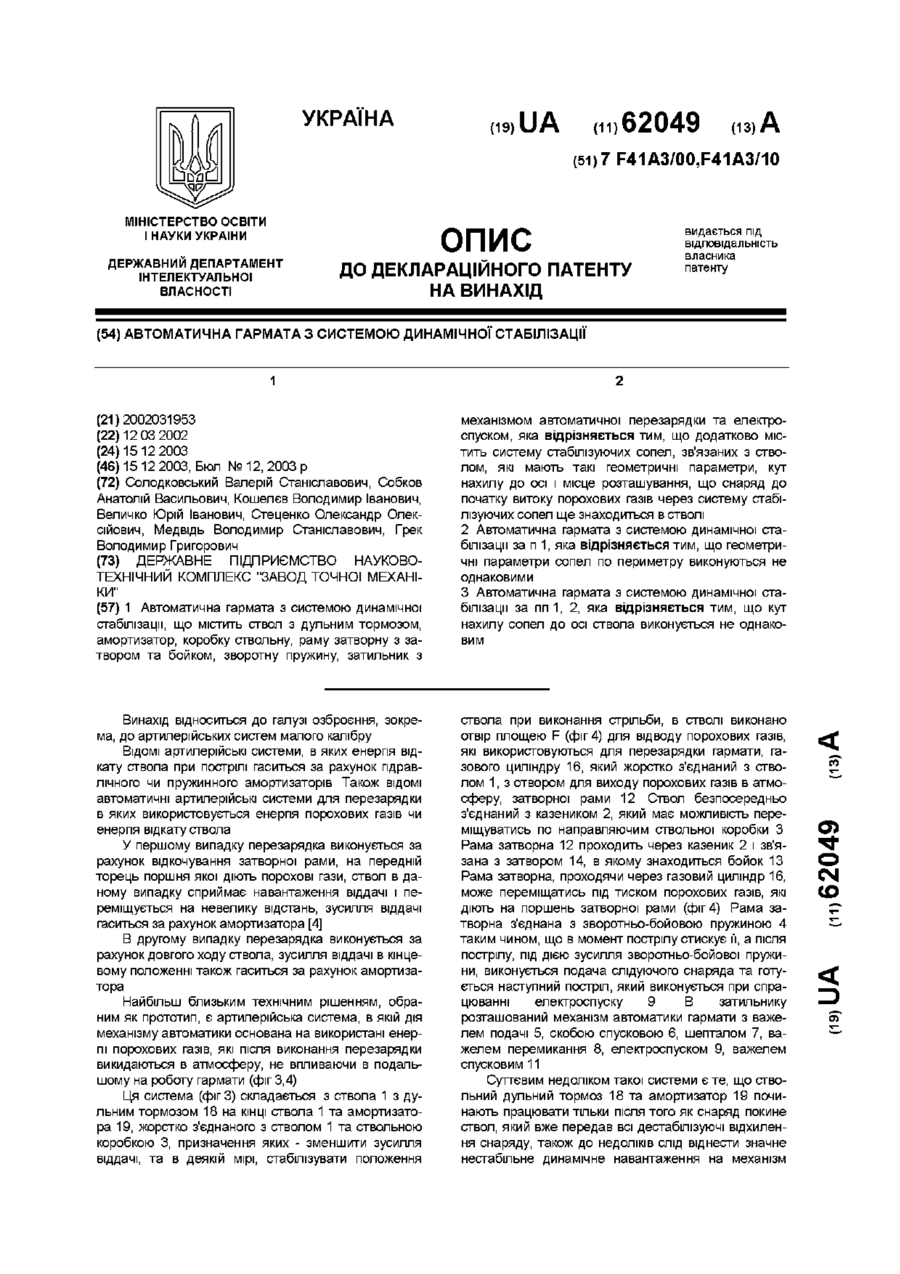
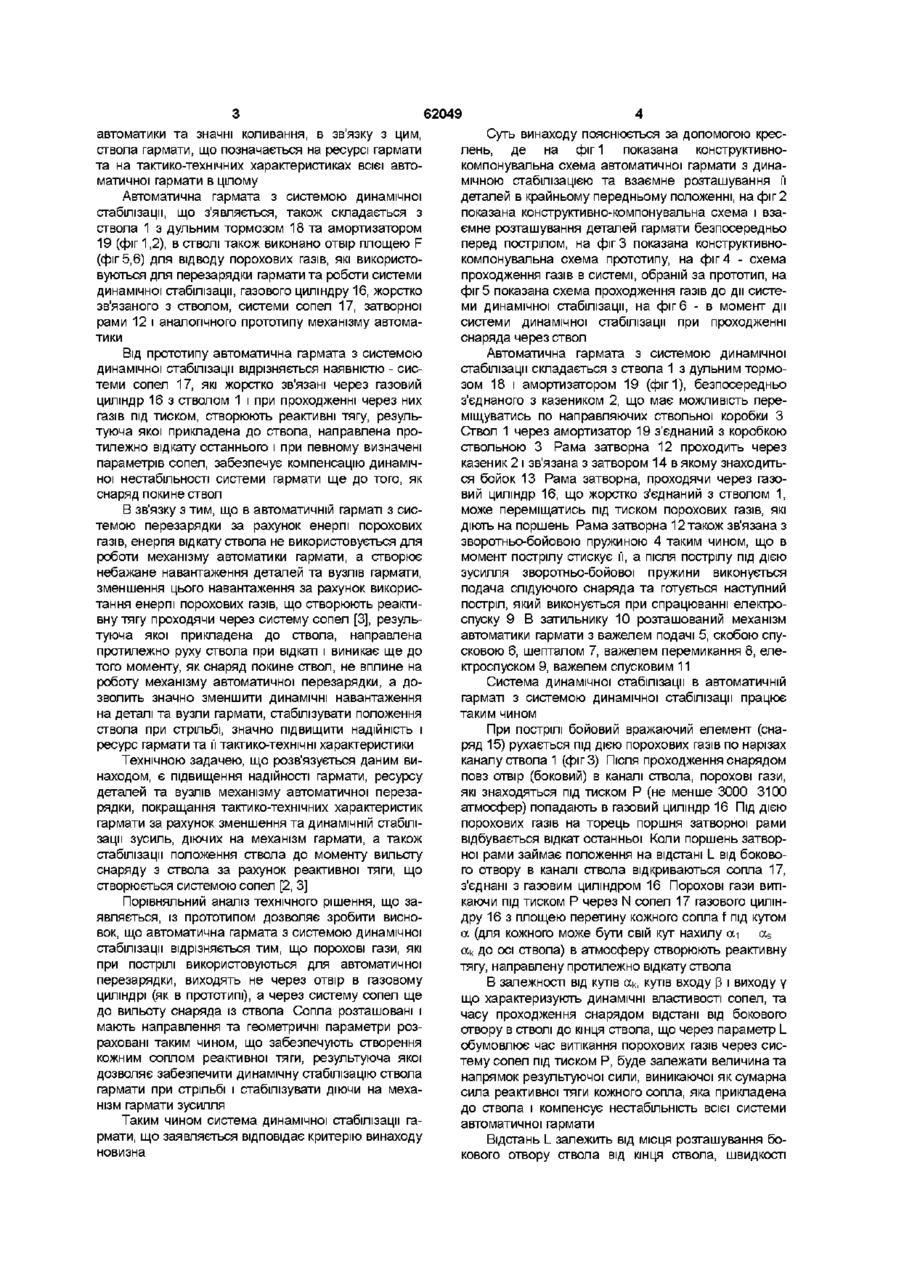
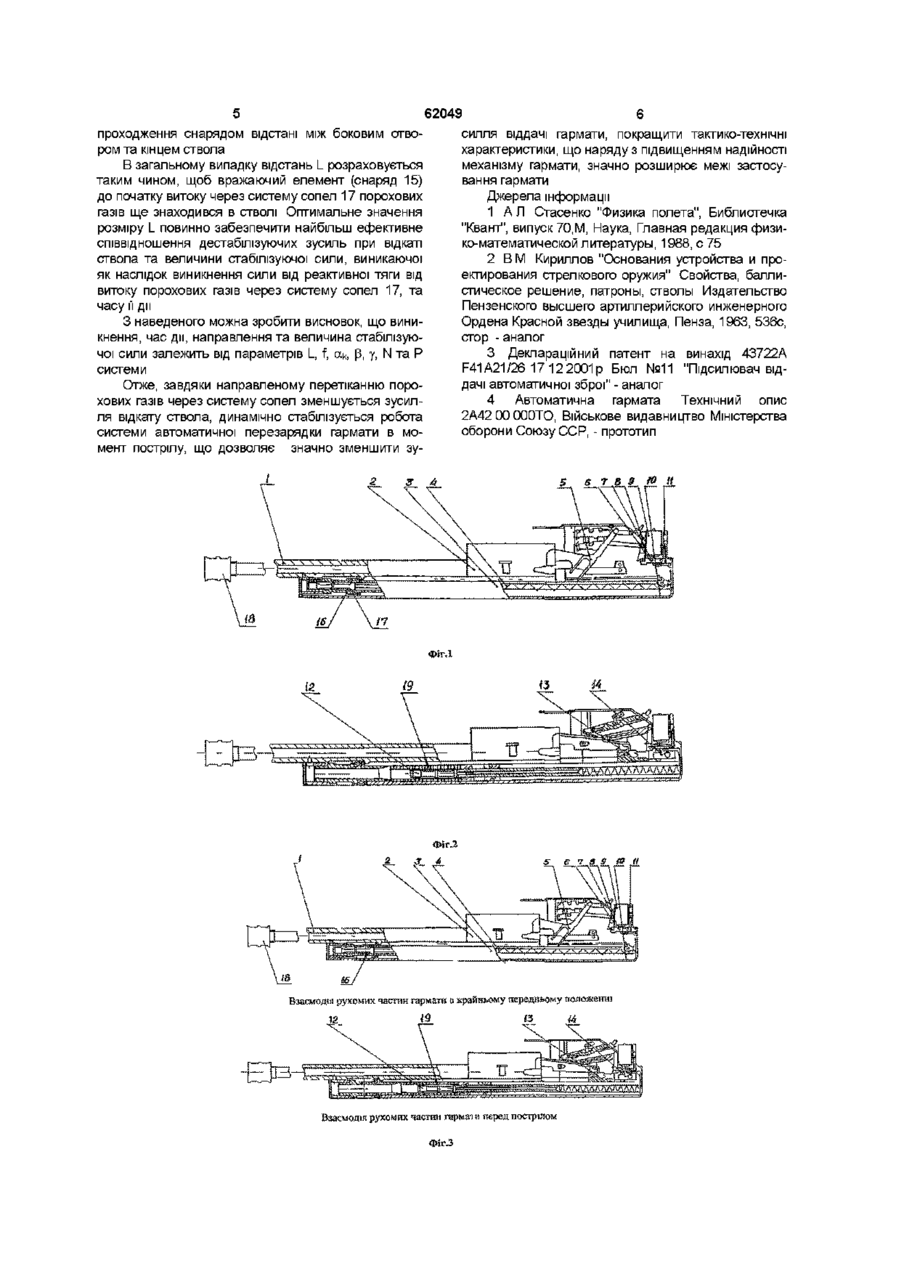
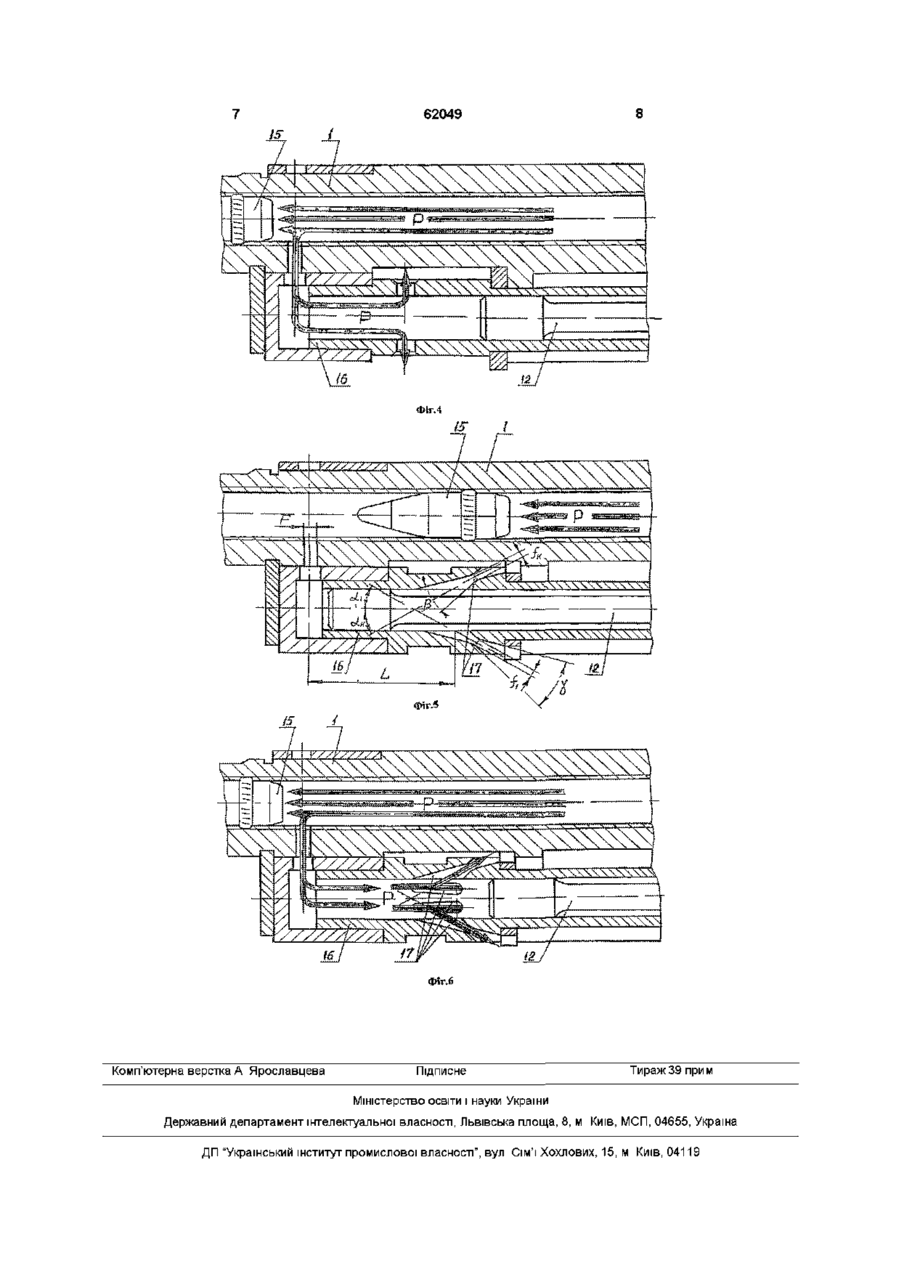
1 Автоматична гармата з системою динамічної стабілізації, що містить ствол з дульним тормозом, амортизатор, коробку ствольну, раму затворну з затвором та бойком, зворотну пружину, затильник з механізмом автоматичної перезарядки та електроспуском, яка відрізняється тим, що додатково містить систему стабілізуючих сопел, зв'язаних з стволом, які мають такі геометричні параметри, кут нахилу до осі і місце розташування, що снаряд до початку витоку порохових газів через систему стабілізуючих сопел ще знаходиться в стволі 2 Автоматична гармата з системою динамічної стабілізації за п 1, яка відрізняється тим, що геометричні параметри сопел по периметру виконуються не однаковими 3 Автоматична гармата з системою динамічної стабілізації за пп1, 2, яка відрізняється тим, що кут нахилу сопел до осі ствола виконується не однаковим Винахід відноситься до галузі озброєння, зокрема, до артилерійських систем малого калібру ВІДОМІ артилерійські системи, в яких енергія відкату ствола при пострілі гаситься за рахунок гідравлічного чи пружинного амортизаторів Також ВІДОМІ автоматичні артилерійські системи для перезарядки в яких використовується енергія порохових газів чи енергія відкату ствола У першому випадку перезарядка виконується за рахунок відкочування затворної рами, на передній торець поршня якої діють порохові гази, ствол в даному випадку сприймає навантаження віддачі і переміщується на невелику відстань, зусилля віддачі гаситься за рахунок амортизатора [4] В другому випадку перезарядка виконується за рахунок довгого ходу ствола, зусилля віддачі в кінцевому положенні також гаситься за рахунок амортизатора Найбільш близьким технічним рішенням, обраним як прототип, є артилерійська система, в якій дія механізму автоматики основана на використані енергії порохових газів, які після виконання перезарядки викидаються в атмосферу, не впливаючи в подальшому на роботу гармати (фіг 3,4) Ця система (фіг 3) складається з ствола 1 з дульним тормозом 18 на КІНЦІ ствола 1 та амортизатора 19, жорстко з'єднаного з стволом 1 та ствольною коробкою 3, призначення яких - зменшити зусилля віддачі, та в деякій мірі, стабілізувати положення ствола при виконання стрільби, в стволі виконано отвір площею F (фіг 4) для відводу порохових газів, які використовуються для перезарядки гармати, газового циліндру 16, який жорстко з'єднаний з стволом 1, з отвором для виходу порохових газів в атмосферу, затворної рами 12 Ствол безпосередньо з'єднаний з казеником 2, який має можливість переміщуватись по направляючим ствольної коробки З Рама затворна 12 проходить через казеник 2 і зв'язана з затвором 14, в якому знаходиться бойок 13 Рама затворна, проходячи через газовий циліндр 16, може переміщатись під тиском порохових газів, які діють на поршень затворної рами (фіг 4) Рама затворна з'єднана з зворотньо-бойовою пружиною 4 таким чином, що в момент пострілу стискує її, а після пострілу, під дією зусилля зворотньо-бойової пружини, виконується подача слідуючого снаряда та готується наступний постріл, який виконується при спрацюванні електроспуску 9 В затильнику розташований механізм автоматики гармати з важелем подачі 5, скобою спусковою 6, шепталом 7, важелем перемикання 8, електроспуском 9, важелем спусковим 11 Суттєвим недоліком такої системи є те, що ствольний дульний тормоз 18 та амортизатор 19 починають працювати тільки після того як снаряд покине ствол, який вже передав всі дестабілізуючі відхилення снаряду, також до недоліків слід віднести значне нестабільне динамічне навантаження на механізм ^ о (О 62049 автоматики та значні коливання, в звязку з цим, ствола гармати, що позначається на ресурсі гармати та на тактико-технічних характеристиках всієї автоматичної гармати в цілому Автоматична гармата з системою динамічної стабілізації, що з'являється, також складається з ствола 1 з дульним тормозом 18 та амортизатором 19 (фіг 1,2), в стволі також виконано отвір площею F (фіг 5,6) для відводу порохових газів, які використовуються для перезарядки гармати та роботи системи динамічної стабілізації, газового циліндру 16, жорстко зв'язаного з стволом, системи сопел 17, затворної рами 12 і аналогічного прототипу механізму автоматики Суть винаходу пояснюється за допомогою креслень, де на фіг 1 показана конструктивнокомпонувальна схема автоматичної гармати з динамічною стабілізацією та взаємне розташування її деталей в крайньому передньому положенні, на фіг 2 показана конструктивно-компонувальна схема і взаємне розташування деталей гармати безпосередньо перед пострілом, на фіг 3 показана конструктивнокомпонувальна схема прототипу, на фіг 4 - схема проходження газів в системі, обраній за прототип, на фіг 5 показана схема проходження газів до дії системи динамічної стабілізації, на фіг 6 - в момент дії системи динамічної стабілізації при проходженні снаряда через ствол Від прототипу автоматична гармата з системою динамічної стабілізації відрізняється наявністю - системи сопел 17, які жорстко зв'язані через газовий циліндр 16 з стволом 1 і при проходженні через них газів під тиском, створюють реактивні тягу, результуюча якої прикладена до ствола, направлена протилежно відкату останнього і при певному визначені параметрів сопел, забезпечує компенсацію динамічної нестабільності системи гармати ще до того, як снаряд покине ствол Автоматична гармата з системою динамічної стабілізації складається з ствола 1 з дульним тормозом 18 і амортизатором 19 (фиг 1), безпосередньо з'єднаного з казеником 2, що має можливість переміщуватись по направляючих ствольної коробки З Ствол 1 через амортизатор 19 з'єднаний з коробкою ствольною 3 Рама затворна 12 проходить через казеник 2 і зв'язана з затвором 14 в якому знаходиться бойок 13 Рама затворна, проходячи через газовий циліндр 16, що жорстко з'єднаний з стволом 1, може переміщатись під тиском порохових газів, які діють на поршень Рама затворна 12 також зв'язана з зворотньо-бойовою пружиною 4 таким чином, що в момент пострілу стискує її, а після пострілу під дією зусилля зворотньо-бойової пружини виконується подача слідуючого снаряда та готується наступний постріл, який виконується при спрацюванні електроспуску 9 В затильнику 10 розташований механізм автоматики гармати з важелем подачі 5, скобою спусковою 6, шепталом 7, важелем перемикання 8, електроспуском 9, важелем спусковим 11 В зв'язку з тим, що в автоматичній гарматі з системою перезарядки за рахунок енергії порохових газів, енергія відкату ствола не використовується для роботи механізму автоматики гармати, а створює небажане навантаження деталей та вузлів гармати, зменшення цього навантаження за рахунок використання енергії порохових газів, що створюють реактивну тягу проходячи через систему сопел [3], результуюча якої прикладена до ствола, направлена протилежно руху ствола при відкаті і виникає ще до того моменту, як снаряд покине ствол, не вплине на роботу механізму автоматичної перезарядки, а дозволить значно зменшити динамічні навантаження на деталі та вузли гармати, стабілізувати положення ствола при стрільбі, значно підвищити надійність і ресурс гармати та її тактико-технічні характеристики Технічною задачею, що розв'язується даним винаходом, є підвищення надійності гармати, ресурсу деталей та вузлів механізму автоматичної перезарядки, покращання тактико-технічних характеристик гармати за рахунок зменшення та динамічній стабілізації зусиль, діючих на механізм гармати, а також стабілізації положення ствола до моменту вильоту снаряду з ствола за рахунок реактивної тяги, що створюється системою сопел [2, 3] Порівняльний аналіз технічного рішення, що заявляється, із прототипом дозволяє зробити висновок, що автоматична гармата з системою динамічної стабілізації відрізняється тим, що порохові гази, які при пострілі використовуються для автоматичної перезарядки, виходять не через отвір в газовому циліндрі (як в прототипі), а через систему сопел ще до вильоту снаряда із ствола Сопла розташовані і мають направлення та геометричні параметри розраховані таким чином, що забезпечують створення кожним соплом реактивної тяги, результуюча якої дозволяє забезпечити динамічну стабілізацію ствола гармати при стрільбі і стабілізувати діючи на механізм гармати зусилля Таким чином система динамічної стабілізації гармати, що заявляється відповідає критерію винаходу новизна Система динамічної стабілізації в автоматичній гарматі з системою динамічної стабілізації працює таким чином При пострілі бойовий вражаючий елемент (снаряд 15) рухається під дією порохових газів по нарізах каналу ствола 1 (фіг 3) Після проходження снарядом повз отвір (боковий) в каналі ствола, порохові гази, які знаходяться під тиском Р (не менше 3000 3100 атмосфер) попадають в газовий циліндр 16 Під дією порохових газів на торець поршня затворної рами відбувається відкат останньої Коли поршень затворної рами займає положення на відстані L від бокового отвору в каналі ствола відкриваються сопла 17, з'єднані з газовим циліндром 16 Порохові гази витікаючи під тиском Р через N сопел 17 газового циліндру 16 з площею перетину кожного сопла f під кутом а (для кожного може бути свій кут нахилу ои as сік до осі ствола) в атмосферу створюють реактивну тягу, направлену протилежно відкату ствола В залежності від кутів a,k, кутів входу р і виходу у що характеризують динамічні властивості сопел, та часу проходження снарядом відстані від бокового отвору в стволі до кінця ствола, що через параметр L обумовлює час витікання порохових газів через систему сопел під тиском Р, буде залежати величина та напрямок результуючої сили, виникаючої як сумарна сила реактивної тяги кожного сопла, яка прикладена до ствола і компенсує нестабільність всієї системи автоматичної гармати Відстань L залежить від місця розташування бокового отвору ствола від кінця ствола, швидкості 62049 проходження снарядом відстані між боковим отвосилля віддачі гармати, покращити тактико-технічні ром та кінцем ствола характеристики, що наряду з підвищенням надійності В загальному випадку відстань L розраховується механізму гармати, значно розширює межі застосутаким чином, щоб вражаючий елемент (снаряд 15) вання гармати до початку витоку через систему сопел 17 порохових Джерела інформації газів ще знаходився в стволі Оптимальне значення 1 А Л Стасенко "Физика полета", Библиотечка розміру L повинно забезпечити найбільш ефективне "Квант", випуск 70,М, Наука, Главная редакция физиспіввідношення дестабілізуючих зусиль при відкаті ко-математической литературы, 1988, с 75 ствола та величини стабілізуючої сили, виникаючої 2 В М Кириллов "Основания устройства и прояк наслідок виникнення сили від реактивної тяги від ектирования стрелкового оружия" Свойства, балливитоку порохових газів через систему сопел 17, та стическое решение, патроны, стволы Издательство часу ґі дії Пензенского высшего артиллерийского инженерного Ордена Красной звезды училища, Пенза, 1963, 536с, З наведеного можна зробити висновок, що винистор - аналог кнення, час дії, направлення та величина стабілізуючої сили залежить від параметрів L, f, ом, Р, у, N та Р 3 Деклараційний патент на винахід 43722А системи F41A21/26 1712 2001 р Бюл №11 "Підсилювач віддачі автоматичної зброї" - аналог Отже, завдяки направленому перетіканню порохових газів через систему сопел зменшується зусил4 Автоматична гармата Технічний опис ля відкату ствола, динамічно стабілізується робота 2А42 00 000ТО, Військове видавництво Міністерства системи автоматичної перезарядки гармати в мооборони Союзу ССР, - прототип мент пострілу, що дозволяє значно зменшити зу ФІГ.1 ІЗ Ц—у Ц і Фіг.2 Взаємодія рухомих частин гармати D крайньому передньому положенні 12 Ш_ J3 -f- ГБ Взаємодія рухомих частий гармаї и перед пострілом ФІг.3 44 62049 IS Фіг-4 IS I ФІГ.6 Комп'ютерна верстка А Ярославцева Підписне Тираж39 прим Міністерство освіти і науки України Державний департамент інтелектуальної власності, Львівська площа, 8, м Київ, МСП, 04655, Україна ДП "Український інститут промислової власності", вул Сім'ї Хохлових, 15, м Київ, 04119
ДивитисяДодаткова інформація
Назва патенту англійськоюSelf-firer gun with system of dynamical stabilization
Автори англійськоюSolodkovskyi Valerii Stanislavocych, Sobkov Anatolii Vasyliovych, Velychko Yurii Ivanovych, Stetsenko Oleksandr Oleksiiovych, Medvid Volodymyr Stanislavovych, Hrek Volodymyr Hryhorovych
Назва патенту російськоюАвтоматическая пушка с системой динамической стабилизации
Автори російськоюСолодковский Валерий Станиславович, Собков Анатолий Васильевич, Величко Юрий Иванович, Стеценко Александр Алексеевич, Медвидь Владимир Станиславович, Грек Владимир Григорьевич
МПК / Мітки
МПК: F41A 3/00
Мітки: динамічної, гармата, стабілізації, автоматична, системою
Код посилання
<a href="https://ua.patents.su/4-62049-avtomatichna-garmata-z-sistemoyu-dinamichno-stabilizaci.html" target="_blank" rel="follow" title="База патентів України">Автоматична гармата з системою динамічної стабілізації</a>
Безвідкатна гармата підвищеної потужності

Номер патенту: 43806
Опубліковано: 15.05.2003
Автори: Прохницький Леонід Опанасович, Бондарь Володимир Борисович, Лавриков Сергій Олексійович, Бондаренко Леонід Іванович
Мітки: гармата, потужності, підвищеної, безвідкатна
Формула / Реферат:
Безвідкатна гармата підвищеної потужності, що містить силову раму, ствол із дуловим гальмом і каморою, зарядний пристрій, сопловий апарат і пристрій ініціювання пострілу, який відрізняється тим, що камора ствола розділена жорсткою перегородкою на дві частини, одна з яких призначена для розміщення снаряда із метальним зарядом і з'єднана зі стволом, а інша з'єднана із соплом і призначена для розміщення заряду, який створює зусилля, рівне...
Танкова гармата

Номер патенту: 39996
Опубліковано: 16.07.2001
Автори: Жаров Віталій Олексійович, Чернов Юрій Костянтинович, Борисюк Михайло Дем'янович, Магерамов Лютфалій Курбан-Алієвич, Шаламов Олександр Миколайович
МПК: F41A 23/00, F41A 9/00
Формула / Реферат:
1. Танкова гармата, яка містить ствол з замком, противідкатні пристрої, кінематичне зв'язані з люлькою, уловлювач піддонів та закріплену на люльці огорожу, яка має основу та бокові щити, яка відрізняється тим, що огорожу обладнано задньою стінкою, закріпленою на щитах, та лотком для укладання боєприпасів, встановленим на одному з щитів з можливістю повороту навколо горизонтальної осі з вертикального у горизонтальне положення та навпаки з...
Електронна гармата для плавки металів

Номер патенту: 51752
Опубліковано: 16.12.2002
Автори: ДЕРЕЧА Олександр Якович, Ахонін Сергій Володимирович, Іщук Юрій Тимофійович, Васюра Віктор Миколайович, ТРИГУБ Микола Петрович, Пап Петро Аркадійович
МПК: H01J 37/06, H05B 7/00
Мітки: металів, плавки, гармата, електронна
Формула / Реферат:
1. Електронна гармата для плавки металів, яка включає камеру з патрубками для вакуумної відкачки; стакан, катодотримач з катодами прямого і електронного розжарення, струмоввідні електроди, зібрані через ізолятори в єдиний катодний вузол; анодну плиту з анодом; променевід, навколо якого розміщені електромагнітні котушки фокусування і відхилення; систему водяного охолодження гармати, яка відрізняється тим, що стакан катодного вузла містить...
Газорозрядна електронна гармата та спосіб керування нею
Номер патенту: 60377
Опубліковано: 15.10.2003
Автор: Новіков Анатолій Олександрович
МПК: H01J 3/00, H01J 37/00
Мітки: газорозрядна, керування, електронна, нею, гармата, спосіб
Формула / Реферат:
1. Газорозрядна електронна гармата, що містить розташовані уздовж осі електронного пучка катодний вузол, керуючий електрод та анодний вузол, які утворюють плазмове джерело іонів, яка відрізняється тим, що керуючий електрод та анодний вузол виконані як електроди магнетронної розрядної системи, які підключені до джерел електричного живлення.2. Гармата за п. 1, яка відрізняється тим, що катод магнетронної розрядної системи виконаний...
Газорозрядна електронна гармата
Номер патенту: 28853
Опубліковано: 16.10.2000
Автори: Новіков Анатолій Олександрович, Котик Олександр Валерійович
МПК: H01J 37/06
Мітки: газорозрядна, електронна, гармата
Формула / Реферат:
Газорозрядна електронна гармата, яка містить катодний вузол з холодним катодом, високовольтний подільний ізолятор та анодний вузол, який складається з конусного електрода, ширша основа якого направлена до катода, яка відрізняється тим, що конусний анод виконано в формі зрізаної багатогранної піраміди, переріз якої має вигляд замкнутої ламаної лінії, крок А якої вибирається з виразу
Попередній патент: Антисептичний супозиторій та мазь
Наступний патент: Розчин для вимивання рельєфних зображень фотополімерних друкарських форм
Випадковий патент: Спосіб експлуатації сталевого прокатного валка