Моноімпульсна система з фазовим пеленгатором цілей в кутомісцевій площині
Номер патенту: 62390
Опубліковано: 15.12.2003
Автори: Дорошко Ігор Миколайович, Челпанов Володимир Валентинович, Вершинін Ігор Павлович
Формула / Реферат
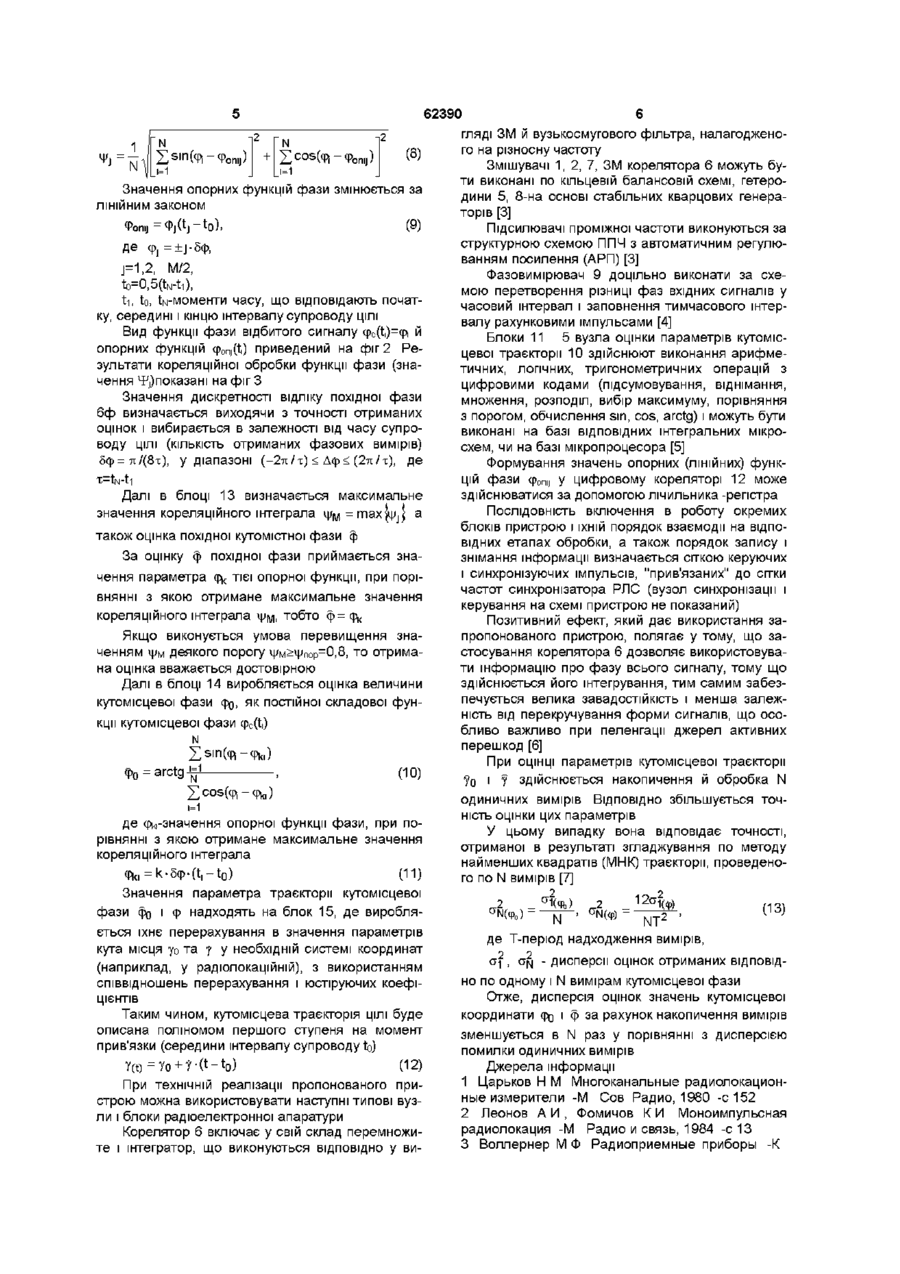
Моноімпульсна система з фазовим пеленгатором цілей в кутомісцевій площині, що містить паралельно включені блоки першого і другого змішувачів і першого і другого підсилювачів проміжної частоти (ППЧ), блок першого гетеродина, вихід якого з'єднаний із другими входами блоків змішувачів, а виходи блоків змішувачів з'єднані з входами блоків першого і другого ППЧ, який відрізняється тим, що додатково введені блоки третього змішувача, другого гетеродина, корелятора, фазовимірювача і вузол оцінки параметрів кутомісцевої траєкторії у складі послідовно з'єднаних блоків накопичення вимірів, цифрового корелятора, оцінки похідної фази, оцінки кутомісцевої фази і блока перерахування параметрів кутомісцевої траєкторії, причому перші входи блоків корелятора і третього змішувача з'єднані, відповідно, з виходами блоків першого і другого ППЧ, вихід блока другого гетеродина з'єднаний із другими входами блоків третього змішувача і фазовимірювача, вихід блока третього змішувача з'єднаний із другим входом блока корелятора, вихід блока корелятора - з першим входом фазовимірювача, а вихід блока фазовимірювача - з входом блока накопичення вимірів, при цьому входами пристрою є входи блоків першого і другого змішувачів, а виходом пристрою - вихід блока перерахування параметрів кутомісцевої траєкторії.
Текст
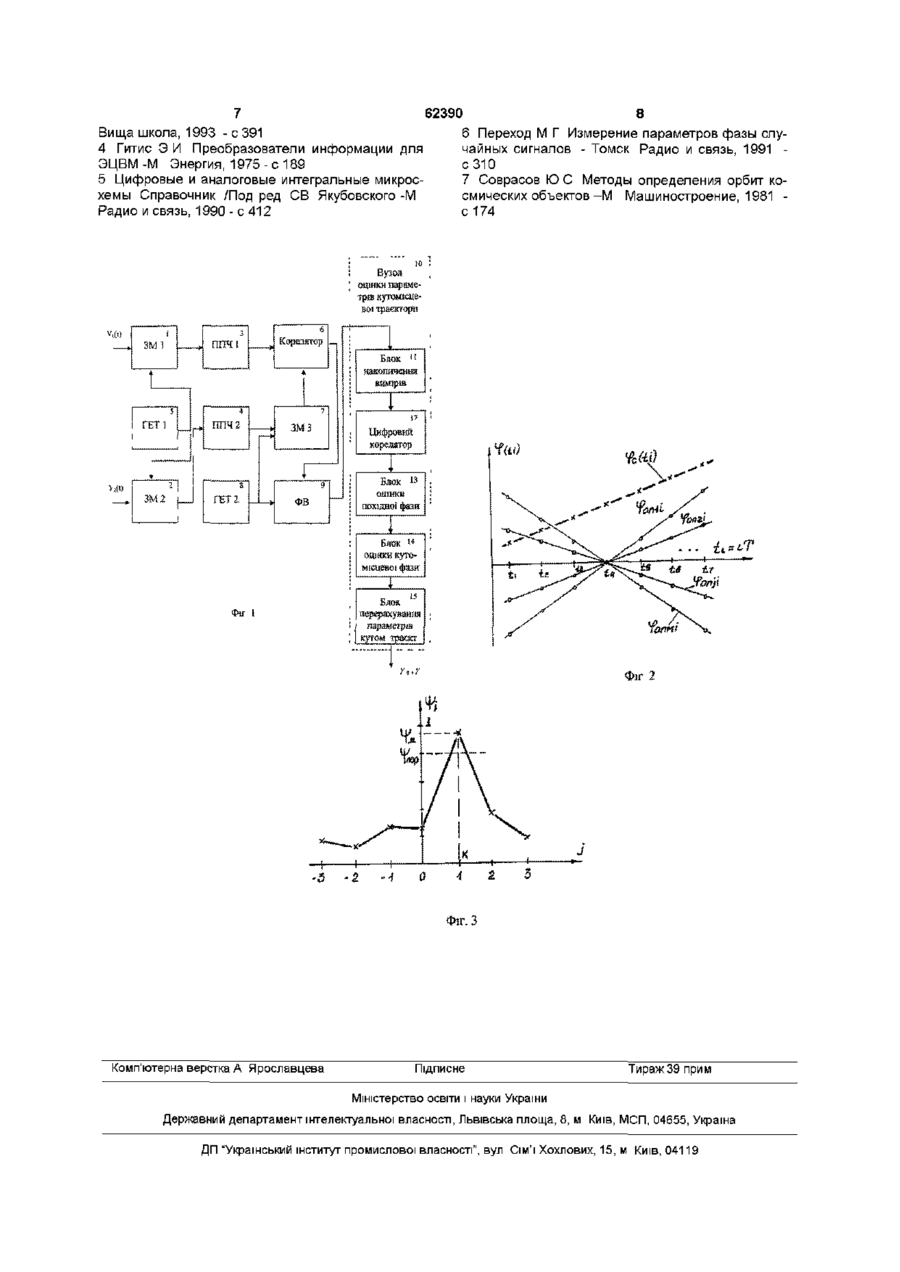
Моноімпульсна система з фазовим пеленгатором цілей в кутомісцевій площині, що містить паралельно включені блоки першого і другого змішувачів і першого і другого підсилювачів проміжної частоти (ППЧ), блок першого гетеродина, вихід якого з'єднаний із другими входами блоків змішувачів, а виходи блоків змішувачів з'єднані з входами блоків першого і другого ППЧ, який відрізняється тим, що додатково введені блоки третього змішувача, другого гетеродина, корелятора, фазовимірювача і вузол оцінки параметрів кутомісцевої траєкторії у складі послідовно з'єднаних блоків накопичення вимірів, цифрового корелятора, оцінки похідної фази, оцінки кутомісцевої фази і блока перерахування параметрів кутомісцевої траєкторії, причому перші входи блоків корелятора і третього змішувача з'єднані, ВІДПОВІДНО, З виходами блоків першого і другого ППЧ, вихід блока другого гетеродина з'єднаний із другими входами блоків третього змішувача і фазовимірювача, вихід блока третього змішувача з'єднаний із другим входом блока корелятора, вихід блока корелятора - з першим входом фазовимірювача, а вихід блока фазовимірювача - з входом блока накопичення вимірів, при цьому входами пристрою є входи блоків першого і другого змішувачів, а виходом пристрою - вихід блока перерахування параметрів кутомісцевої траєкторії Пропонований винахід відноситься до області радіолокації і може бути використаний для оцінки параметрів кутомісцевої траєкторії цілей чи завадоносія Відома моноімпульсна система з фазовим пеленгатором, що включає корелятори квадратурних каналів, виконані у вигляді схеми перемножування й усереднення, фазообертач на ті/2 і дільник, що забезпечують формування відносин мнимої і дійсної частин взаємної кореляційної функції вхідних сигналів, на підставі якого виробляється оцінка кутової координати [1] Недоліком даного пристрою є низька точність одиничних вимірів інформативного параметра і складність реалізації вимірника, особливо при цифровій його модифікації Найбільш близьким до запропонованого технічним рішенням, обраним як прототип, є моноімпульсна двоканальна система з фазовим кутовим дискримінатором, яка містить схему перетворення вхідних сигналів у складі двох змішувачів (ЗМ) і гетеродина, двох підсилювачів проміжної частоти (ППЧ), фазообертач на ті/2 і фазового детектора ється перетворення вхідних сигналів на проміжну частоту, посилення з обмеженням по амплітуді і формування вихідного сигналу фазового детектора, рівень якого відповідає значенню різниці фаз вхідних сигналів А(р і величині вимірювальної кутової координати © , _ .sin© [2] У даному пристрої по кожному каналі здійсню Д ф = 2тга X , де d-відстань між фазовими центрами приймальних антен, Я,-довжина хвилі Недоліком даного пристрою є низька точність оцінки значень кутової координати, одержуваної на основі перетворення вихідних сигналів фазового детектора і низька завадостійкість як у режимі активної локації, так і особливо при пеленгації джерел активних перешкод В основу винаходу поставлена задача створити таку моноімпульсну систему з фазовим пеленгатором цілей в кутомісцевій площині, у який введення нових блоків, а саме, корелятора, ЗМ, гетеродина, фазовимірювача (ФВ) і вузла оцінки параметрів кутомісцевої траєкторії дозволять забезпечити підвищення точності і завадостійкості О о> со сч (О 62390 наний із другим входом корелятора 6, вихід якого одиничних вимірів і підвищення точності оцінки з'єднаний з першим входом ФВ, вихід ФВ з'єднапараметрів кутомісцевої траєкторії за рахунок наний із входом блоку накопичення вимірів 11, вхокопичення і кореляційної обробки ПОСЛІДОВНОСТІ дами пристрою є входи першого і другого ЗМ, а одиничних вимірів кутомісцевої фази виходом пристрою - вихід блоку перерахування Поставлена задача вирішується за рахунок топараметрів кутомісцевої траєкторії 15 го, що в моноімпульсну двоканальну систему з фазовим кутовим дискримінатором, що містить Пристрій працює наступним чином У режимі паралельно включені блоки першого і другого ЗМ кутомісцевої пеленгації ЦІЛІ на вхід першого і друта першого і другого ППЧ, блок першого гетеродигого ЗМ 1, 2 надходять луна-сигнали на несучій на, вихід якого з'єднаний із другими входами блочастоті fH з антенних систем, фазові центри яких ків ЗМ, а виходи блоків ЗМ з'єднані з ВІДПОВІДНИМИ рознесені на відстань d У ЗМ здійснюється перевходами блоків першого і другого ППЧ, додатково творення сигналів на проміжну частоту fnp введені блоки третього ЗМ, другого гетеродина, Fnp=fri-fH, (2) корелятора, ФВ і вузол оцінки параметрів кутомісІнформативним параметром є різниця цевої траєкторії у складі послідовно з'єднаних блофаз А(р між вхідними сигналами, що визначаються ків накопичення вимірів, цифрового корелятора, кутом місця © оцінки похідної фази, оцінки кутомісцевої фази і блоку перерахування параметрів кутомісцевої Дф = sin© (3) X траєкторії, при цьому перші входи блоків кореляУ третьому ЗМ 7 сигнал перетворюється на тора і третього ЗМ з'єднані ВІДПОВІДНО З виходами опорну частоту першого і другого ППЧ, вихід блоку другого гетеродина з'єднаний із другими входами блоків треfon=fnP-fr2 (4) тього ЗМ і ФВ, вихід блоку третього ЗМ з'єднаний Корелятор 6 забезпечує кореляційну обробку із другим входом корелятора, вихід блоку корелявхідних сигналів Як схему перемножування доцітора - з першим входом ФВ, а вихід блоку ФВ - з льно використовувати ЗМ, а як інтегратор - вузьковходом блоку накопичення вимірів смуговий фільтр, налагоджений на вихідну частоту ЗМ корелятора, рівну частоті другого гетеродину Технічний результат, який може бути отримаfr2 ний при здійсненні винаходу, полягає у забезпеfr2=fnp-(fnp-fr2) (5) ченні додаткової кореляційної обробки вхідних Корисна інформація полягає в значеннях фази сигналів, формуванні одиничних вимірів різниці сигналу з виходу корелятора 6 щодо фази сигналу фаз, і їхнє накопичення По отриманій ПОСЛІДОВНОдругого гетеродина 8 срГ2 СТІ фазових вимірів виробляється оцінка параметФс=Дф+Дфг2 (6) рів кутомісцевої траєкторії, для чого використовується кореляційний метод порівняння отриманої Використання корелятора забезпечує більш функції з набором опорних функцій фази При високу завадостійкість при вимірі різниці фаз і мецьому підвищується точність і завадостійкість одиншу залежність результату виміру від перекручуничних вимірів, а також точність результуючої оцівання форми вхідних сигналів Особливо це важнки параметрів кутомісцевої траєкторії ЦІЛІ І заваливо при пеленгації завадоносія доносія На фіг 1 приведена структурна схема Далі у ФВ визначається кодове значення інзапропонованого пристрою формативного параметру - різниці фаз вхідних На фіг 2 показаний вид функції кутомісцевої сигналів фази відбитого сигналу (чи сигналу завадоносія) (Дф+Ф г 2 )-ф г 2 =Аф U) та опорних функцій фази Фазообертач на ті/2 і фазовий детектор (блоки На фіг 3 приведені результати кореляційної прототипу) є елементами ФВ обробки типової функції фази, проведеної в ході Одиничні виміри різниці фаз формуються з заоцінки параметрів кутомісцевої траєкторії даною періодичністю Т Наприклад, при супроводі Запропонована моноімпульсна система з фаЦІЛІ - з періодичністю випромінювання зондувальзовим пеленгатором цілей в кутомісцевої площині них сигналів, а при супроводі завадоносія - з перімістить паралельно включені перший змішувач одом, що відповідає часу накопичення вхідних (ЗМ) 1 і другий ЗМ 2, перший підсилювач проміжсигналів, по яких проводиться вимір ної частоти (ППЧ) 3 і другий ППЧ 4, перший гетеВ блоці 11 здійснюється накопичення N одиродин 5, корелятор 6, третій ЗМ 7, другий гетероничних вимірів, тобто формується функція кутомідин 8, фазовимірювач (ФВ) 9 і вузол оцінки сцевої фази луна-сигналів, що складається зі знапараметрів кутомісцевої траєкторії 10 у складі почень ф=Дф, де і=І, 2 N 3 огляду на можливість слідовно включених блоків накопичення вимірів нерівнозначності фазових вимірів звичайний алго11, цифрового корелятора 12, оцінки похідної фаритм оцінки параметрів кутомісцевої траєкторії зи 13, оцінки кутомісцевої фази 14 і блоку перерашляхом фільтрації вимірів тут не використовуєтьхування параметрів кутомісцевої траєкторії 15, причому вихід першого гетеродина з'єднаний із ся другими входами першого і другого ЗМ, вихід перДля оцінки кута нахилу фазової траєкторії шого ЗМ з'єднаний з входом першого ППЧ, вихід (швидкості ЗМІНИ фази ф) використовується кореякого з'єднаний з першим входом корелятора 6, ляційний метод, для цього в цифровому корелятовихід другого ЗМ з'єднаний з входом другого ППЧ, рі 12 здійснюється порівняння отриманої функції вихід якого з'єднаний з першим входом третього фази з набором з М опорних (еталонних) функцій ЗМ, вихід другого гетеродина з'єднаний із другими фази фопи, порівняння виробляється шляхом обчивходами третього ЗМ і ФВ, вихід третього ЗМ з'єдслення М значень кореляційного інтеграла 4у, 62390 Konij і 'COS((ft-(fen||) omj. (8) 11 = 11 = Значення опорних функцій фази змінюється за ЛІНІЙНИМ законом Фопі]=Ф](*]-*0). де Ф ] = +J • 5ф, (9) j=1,2, M/2, t0=0,5(tN-ti), ti, to, tN-моменти часу, що відповідають початку, середині і кінцю інтервалу супроводу ЦІЛІ Вид функції фази відбитого сигналу cpc(ti)=(pi й опорних функцій cponjfti) приведений на фіг 2 Результати кореляційної обробки функції фази (значення Ч-^показані на фіг З Значення дискретності відліку похідної фази 6ф визначається виходячи з точності отриманих оцінок і вибирається в залежності від часу супроводу ЦІЛІ (КІЛЬКІСТЬ отриманих фазових вимірів) 5ф=7і/(8т), у діапазоні (-2-л/т) < Дф^, тобто ф=фк Якщо виконується умова перевищення значенням \\ім деякого порогу ц/м^пор-ОД то отримана оцінка вважається достовірною Далі в блоці 14 виробляється оцінка величини кутомісцевої фази фо, як постійної складової функції кутомісцевої фази cpc(t|) N (Ю) 11 = де фкі-значення опорної функції фази, при порівнянні з якою отримане максимальне значення кореляційного інтеграла Значення параметра траєкторії кутомісцевої фази ф і Ф надходять на блок 15, де виробляо ється їхнє перерахування в значення параметрів кута місця уо та у у необхідній системі координат (наприклад, у радіолокаційній), з використанням співвідношень перерахування і юстіруючих коефіцієнтів Таким чином, кутомісцева траєкторія ЦІЛІ буде описана поліномом першого ступеня на момент прив'язки (середини інтервалу супроводу to) Y(t) =Yo + Y-(t-tb) О2) При технічній реалізації пропонованого пристрою можна використовувати наступні типові вузли і блоки радіоелектронної апаратури Корелятор 6 включає у свій склад перемножите і інтегратор, що виконуються ВІДПОВІДНО у ВИ ГЛЯДІ ЗМ й вузькосмугового фільтра, налагодженого на різносну частоту Змішувачі 1, 2, 7, ЗМ корелятора 6 можуть бути виконані по кільцевій балансовій схемі, гетеродини 5, 8-на основі стабільних кварцових генераторів [3] Підсилювачі проміжної частоти виконуються за структурною схемою ППЧ з автоматичним регулюванням посилення (АРП) [3] Фазовимірювач 9 доцільно виконати за схемою перетворення різниці фаз вхідних сигналів у часовий інтервал і заповнення тимчасового інтервалу рахунковими імпульсами [4] Блоки 11 5 вузла оцінки параметрів кутомісцевої траєкторії 10 здійснюют виконання арифметичних, логічних, тригонометричних операцій з цифровими кодами (підсумовування, віднімання, множення, розподіл, вибір максимуму, порівняння з порогом, обчислення sin, cos, arctg) і можуть бути виконані на базі ВІДПОВІДНИХ інтегральних мікросхем, чи на базі мікропроцесора [5] Формування значень опорних (ЛІНІЙНИХ) функцій фази ф п у цифровому кореляторі 12 може ои здійснюватися за допомогою лічильника -регістра ПОСЛІДОВНІСТЬ включення в роботу окремих блоків пристрою і їхній порядок взаємодії на ВІДПОВІДНИХ етапах обробки, а також порядок запису і знімання інформації визначається сіткою керуючих і синхронізуючих імпульсів, "прив'язаних" до сітки частот синхронізатора РЛС (вузол синхронізації і керування на схемі пристрою не показаний) Позитивний ефект, який дає використання запропонованого пристрою, полягає у тому, що застосування корелятора 6 дозволяє використовувати інформацію про фазу всього сигналу, тому що здійснюється його інтегрування, тим самим забезпечується велика завадостійкість і менша залежність від перекручування форми сигналів, що особливо важливо при пеленгації джерел активних перешкод [6] При ОЦІНЦІ параметрів кутомісцевої траєкторії Уо і у здійснюється накопичення й обробка N одиничних вимірів ВІДПОВІДНО збільшується точність оцінки цих параметрів У цьому випадку вона відповідає точності, отриманої в результаті згладжування по методу найменших квадратів (МНК) траєкторії, проведеного по N вимірів [7] a N(cp0) N де Т-перюд надходження вимірів, а 2 , щ - дисперсії оцінок отриманих ВІДПОВІДНО по одному і N вимірам кутомісцевої фази Отже, дисперсія оцінок значень кутомісцевої координати ф і ф за рахунок накопичення вимірів о зменшується в N раз у порівнянні з дисперсією помилки одиничних вимірів Джерела інформації 1 Царьков Н М Многоканальные радиолокационные измерители -М Сов Радио, 1980 -с 152 2 Леонов А И , Фомичов К И Моноимпульсная радиолокация -М Радио и связь, 1984 -с 13 3 Воллернер М Ф Радиоприемные приборы -К 62390 Вища школа, 1993 - с 391 4 Гитис Э И Преобразователи информации для ЭЦВМ-М Энергия, 1975-с 189 5 Цифровые и аналоговые интегральные микросхемы Справочник /Под ред СВ Якубовского -М Радио и связь, 1990 - с 412 8 6 Переход М Г Измерение параметров фазы случайных сигналов - Томск Радио и связь, 1991 с 310 7 Соврасов Ю С Методы определения орбит космических объектов -М Машиностроение, 1981 с 174 to Вузол ОЦІНКИ параметрів кутшісцевоі траєкторії Блок 13 ОНІНКЙ похідної ф ви Блок " ощнки кутоМІОДЄВОІ фази „ ФІГ IS Блок перерахування і параметрів 1 1 кутом траскт j , Фіг 2 -З -2 ФІГ. Комп'ютерна верстка А Ярославцева З Підписне Тираж39 прим Міністерство освіти і науки України Державний департамент інтелектуальної власності, Львівська площа, 8, м Київ, МСП, 04655, Україна ДП "Український інститут промислової власності", вул Сім'ї Хохлових, 15, м Київ, 04119
ДивитисяДодаткова інформація
Назва патенту англійськоюMonopulse radar system with a phase direction finder of targets in the elevation plane
Автори англійськоюChelpanov Volodymyr Valentynovych, Doroshko Ihor Mykolaiovych
Назва патенту російськоюМоноимпульсная радилокационная система с фазовым пеленгатором целей в угломестной плоскости
Автори російськоюЧелпанов Владимир Валентинович, Дорошко Игорь Николаевич
МПК / Мітки
МПК: G01S 13/52, G01S 13/00
Мітки: цілей, пеленгатором, площині, кутомісцевій, система, моноімпульсна, фазовим
Код посилання
<a href="https://ua.patents.su/4-62390-monoimpulsna-sistema-z-fazovim-pelengatorom-cilejj-v-kutomiscevijj-ploshhini.html" target="_blank" rel="follow" title="База патентів України">Моноімпульсна система з фазовим пеленгатором цілей в кутомісцевій площині</a>
Адаптивний пристрій супроводу маневруючих цілей

Номер патенту: 56074
Опубліковано: 15.04.2003
Автори: Коваль Олександр Андрійович, Пащенко Руслан Едуардович, Карлов Володимир Дмитрийович, Челпанов Артем Володимирович, Сірик Юрій Анатолійович, Яровий Сергій Володимирович
МПК: G01S 13/52, G01S 13/00
Мітки: маневруючих, цілей, пристрій, адаптивний, супроводу
Формула / Реферат:
Адаптивний пристрій супроводу маневруючих цілей, що містить послідовно з'єднані блоки фільтра Калмана другого порядку, фільтра Калмана третього порядку і комутатор, який відрізняється тим, що додатково введені блок виявлення маневру і блок оцінки інтенсивності маневру, причому блок виявлення маневру складається із послідовно з'єднаних блока формування вибірок, блока обчислення рангу, блока обчислення рангової статистики і порогового блока, а...
Синхронізований автогенератор з негативним фазовим оберненим зв’язком
Номер патенту: 37911
Опубліковано: 15.05.2001
Автори: Карпенко Олександр Федорович, Рапін Володимир Васильович
МПК: H03L 7/00
Мітки: зв'язком, автогенератор, оберненим, негативним, фазовим, синхронізований
Текст:
...на перший вхід перемножувача 9. На другий вхід перемножувача 9, який також є другим входом блоку формування сигналу синхронізації, поступає вихідний сигнал синхронізованого автогенератора 6 у вигляді ug =Ag cos(wct+j). u9=А9соs(3wct+j+2j0)+А9cos(wct+ +2j0-j) є ви хідним сигналом перемножувача 9, який обробляється фільтром низьких частот 10, що вилучає третю гармоніку. Оскільки зміна частоти зовнішнього сигналу мала, то додатковий фазовий...
Нашоломна бінокулярна індикаторна система
Номер патенту: 34642
Опубліковано: 15.03.2001
Автори: Кондратов Петро Олександрович, Шклярський Володимир Іванович, Гой Віталій Миколайович
МПК: G02B 6/43, G02B 5/08, H04N 5/74
Мітки: індикаторна, нашоломна, система, бінокулярна
Формула / Реферат:
Нашоломна бінокулярна індикаторна система, яка містить канал для правого ока. що складається з оптично спряжених першого проекційного кінескопа, першого об'єктива, першого поворотного дзеркала та канал для лівого ока, що складається з оптично спряжених другого проекційного кінескопа, другого об'єктива, другого поворотного дзеркала, а також блок керування, електрично зв'язаний із виводами проекційних кінескопів, яка відрізняється тим, що у...
Пристрій відображення орієнтованих за напрямком умовних позначок цілей, синтезованих з елементів розкладання малоформатного телевізійного растра
Номер патенту: 45923
Опубліковано: 15.04.2002
Автори: Пузанов Денис Михайлович, Говоров Валентін Сергійович
МПК: G09G 1/14
Мітки: пристрій, синтезованих, телевізійного, малоформатного, розкладання, цілей, орієнтованих, умовних, позначок, елементів, відображення, напрямком, растра
Формула / Реферат:
Пристрій відображення орієнтованих за напрямком умовних позначок цілей, синтезованих з елементів розкладання малоформатного телевізійного растра, що містить перший, другий і третій регістри, перший і другий перетворювачі код-напруга, перетворювач код-часовий інтервал, цифровий двійковий лічильник і тригер, який відрізняється тим, що він доповнений блоком кеш-пам'яті, блоком постійної пам'яті, цифровим двійковим лічильником з попереднім...
Обчислювальна система
Номер патенту: 56139
Опубліковано: 15.05.2003
Автори: Любарський Валерій Федорович, Мушка Віра Михайлівна, Коваль Валерій Миколайович, Палагін Олександр Васильович, Булавенко Олег Миколайович, Рабинович Зіновій Львович
МПК: G06F 15/16
Мітки: обчислювальна, система
Формула / Реферат:
1. Обчислювальна система, що містить М обчислювальних блоків, М модулів спільної пам'яті, керуючий процесор, головний комутатор, причому група інформаційних та керуючих входів-виходів кожного з М обчислювальних блоків з'єднана відповідно з групою інформаційних та керуючих входів-виходів головного комутатора, перші N груп інформаційних та керуючих входів-виходів кожного з М обчислювальних блоків з'єднані відповідно з групою інформаційних та...
Попередній патент: Спосіб депофорезу зубів і навколозубних тканин та пристрій для його реалізації
Наступний патент: Пристрій для осьового переміщення розтиральних циліндрів друкарських машин
Випадковий патент: М'ясний паштет з рослинними добавками