Адаптивний пристрій супроводу маневруючих цілей
Номер патенту: 56074
Опубліковано: 15.04.2003
Автори: Карлов Володимир Дмитрийович, Челпанов Артем Володимирович, Пащенко Руслан Едуардович, Яровий Сергій Володимирович, Сірик Юрій Анатолійович, Коваль Олександр Андрійович

Формула / Реферат
Адаптивний пристрій супроводу маневруючих цілей, що містить послідовно з'єднані блоки фільтра Калмана другого порядку, фільтра Калмана третього порядку і комутатор, який відрізняється тим, що додатково введені блок виявлення маневру і блок оцінки інтенсивності маневру, причому блок виявлення маневру складається із послідовно з'єднаних блока формування вибірок, блока обчислення рангу, блока обчислення рангової статистики і порогового блока, а блок оцінки інтенсивності маневру складається з послідовно з'єднаних блока знімання вибірки, запам'ятовуючого пристрою, блока накопичення помилок і блока оцінки прискорення, при цьому входом пристрою є вхід блока фільтра Калмана другого порядку, другий вихід блока фільтра Калмана другого порядку з'єднаний із входом блока формування вибірок і з другим входом блока обчислення рангу, перший вихід блока фільтра Калмана другого порядку додатково з'єднаний із другим входом комутатора, вихід порогового блока з'єднаний із третім входом блока комутатора і другим входом блока знімання вибірки, другий вихід блока формування вибірок з'єднаний із першим входом блока знімання вибірки, вихід блока оцінки прискорення з'єднаний із другим входом блока фільтра Калмана третього порядку, а виходом пристрою є вихід комутатора.
Текст
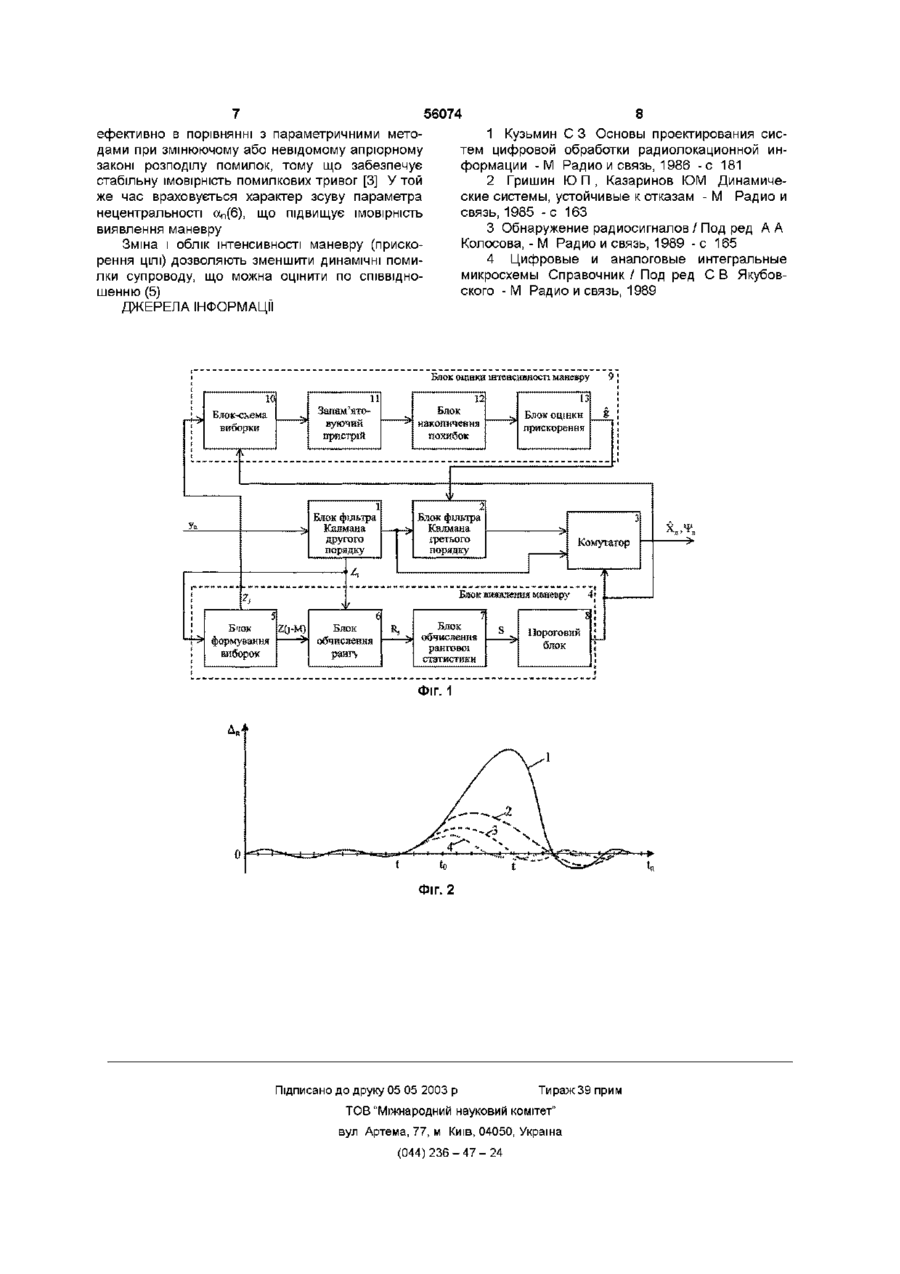
Адаптивний пристрій супроводу маневруючих цілей, що містить послідовно з'єднані блоки фільтра Кал мана другого порядку, фільтра Кал мана третього порядку і комутатор, який відрізняється тим, що додатково введені блок виявлення маневру і блок оцінки інтенсивності маневру, причому блок виявлення маневру складається із послідовно з'єднаних блока формування вибірок, блока обчислення рангу, блока обчислення рангової ста тистики і порогового блока, а блок оцінки інтенсивності маневру складається з послідовно з'єднаних блока знімання вибірки, запам'ятовуючого пристрою, блока накопичення помилок і блока оцінки прискорення, при цьому входом пристрою є вхід блока фільтра Калмана другого порядку, другий вихід блока фільтра Калмана другого порядку з'єднаний із входом блока формування вибірок і з другим входом блока обчислення рангу, перший вихід блока фільтра Калмана другого порядку додатково з'єднаний із другим входом комутатора, вихід порогового блока з'єднаний із третім входом блока комутатора і другим входом блока знімання вибірки, другий вихід блока формування вибірок з'єднаний із першим входом блока знімання вибірки, вихід блока оцінки прискорення з'єднаний із другим входом блока фільтра Калмана третього порядку, а виходом пристрою є вихід комутатора Запропонований винахід відноситься до області радіолокації і може бути використаний для оцінки параметрів траєкторії маневруючої ЦІЛІ ВІДОМИЙ пристрій супроводу й оцінки параметрів траєкторії ЦІЛІ [1], в якому оцінка здійснюється за рекурентною схемою ЛІНІЙНОГО фільтра Калмана Структурна схема даного пристрою складається з m паралельно включених фільтрів Калмана, кожен з них настроєний на визначене значення збуджуючого параметра (прискорення) у діапазоні можливих прискорень маневруючих цілей Результуюча оцінка фільтруючих параметрів утворюється як зважена сума умовних оцінок на виходах фільтрів Недоліком відомого пристрою є складність і громіздкість схеми, а також те, що одержувані оцінки мають недостатню точність за рахунок впливу фільтрів, розстроєних відносно значення прискорення ЦІЛІ Найбільш близьким до запропонованого по технічним рішенням, обраним ж прототип, є пристрій супроводу маневруючих цілей, [2], що включає у свій склад фільтри Калмана другого і третього порядків із схемою комутації їх на виході, а також m паралельно включених фільтрів, настроє них на різний час появи маневру ЦІЛІ, блок вибору максимальної оцінки і блок порівняння з порогом Робота пристрою полягає в наступному Аналізується квадратична складова рівняння руху ЦІЛІ, обумовлена и маневром Критерієм виявлення маневру є перевищення розміром параметра деякого граничного, збуджуючого рівня При перевищенні порога робиться переключення фільтра Калмана другого порядку на фільтр Калмана третього порядку Недоліком даного пристрою є те, що при виявленні маневру ЦІЛІ не враховується можливість зміни закону розподілу помилок супроводу через вплив різних чинників-помилок виміру, пасивних і активних перешкод, при цьому можуть бути не забезпечені задані рівні імовірності правильного виявлення маневру і помилкових тривог Крім того, виявлення маневру ЦІЛІ робиться з дуже великою затримкою, що приводить до появи значних динамічних помилок супроводу При ОЦІНЦІ інтенсивності маневру використовується громіздка схема з ні фільтрами В основу винаходу поставлена задача створити такий адаптивний пристрій супроводу маневруючих цілей, в якому введення нових блоків, як-от (21)2002108135 ( 2 2 ) 1 4 10 2 0 0 2 ( 2 4 ) 1 5 04 2003 о (О ю 56074 блоку непараметричного виявлення маневру ЦІЛІ І тор 3, а також блок виявлення маневру 4 і блок блоку оцінки інтенсивності маневру дозволить заоцінки інтенсивності маневру 9, при цьому блок безпечити своєчасне виявлення маневру при різвиявлення маневру 4 складається з послідовно них законах розподілу збуджуючого параметра і з'єднаних блоку формування вибірок 5, блоку обкрім того, дозволить оцінити характеристики манечислення рангу 6, блоку обчислення рангової ставру Тим самим забезпечуються задані імовірності тистики 7 і порогового блоку 8 Блок оцінки інтенправильного виявлення і помилкової тривоги і сивності маневру 9 складається з послідовно зменшуються динамічні помилки супроводу з'єднаних блоку знімання вибірки 10, запам'ятовуючого пристрою 11, блоку накопичення помилок Для рішення поставленої задачі в пристрій, що 12 і блоку оцінки прискорення 13, при цьому вхомістить послідовно з'єднані блоки фільтрів Калмадом пристрою є вхід блоку фільтра Калмана друна другого і третього порядку, і блок комутатора, гого порядку 1, другий вихід блоку фільтра Калмадодатково включений блок виявлення маневру і на другого порядку 1 з'єднаний з входом блоку блок оцінки інтенсивності маневру, при цьому блок формування вибірок 5 і з другим входом блоку виявлення маневру складається з послідовно обчислення рангу 6, перший вихід блоку фільтра з'єднаних блоку формування вибірок, блоку обчиКалмана другого порядку 1 додатково з'єднаний із слення рангу, блоку обчислення рангової статисдругим входом комутатора 3, вихід порогового тики і порогового блоку, а блок оцінки інтенсивносблоку 8 з'єднаний з третім входом комутатора 3 і ті маневру складається з послідовно з'єднаних другим входом блоку знімання вибірки 10, другий блоку знімання вибірки, запам'ятовуючого привихід блоку формування вибірок 5 з'єднаний із строю, блоку накопичення помилок і блоку оцінки першим входом блоку знімання вибірок 10, вихід прискорення, при цьому входом пристрою є вхід блоку оцінки прискорення 13 з'єднаний з другим фільтра Калмана другого порядку, другий вхід фівходом блоку фільтра Калмана третього порядку льтра Калмана другого порядку, з'єднаний із вхо2, виходом пристрою є вихід комутатора З дом блоку формування вибірок і з другим входом блоку обчислення рангу, перший вихід фільтра Робота запропонованого пристрою полягає в Калмана другого порядку додатково з'єднаний з наступному другим входом комутатора, вхід порогового блоку На вхід пристрою в кожному n-ому огляді РЛС з'єднаний з третім входом комутатора і другого надходять значення параметрів оперних точок входу блока знімання вибірки, другий вихід блоку супроводу уп формування вибірок з'єднаний із першим входом На детермінованій ДІЛЯНЦІ траєкторії ЦІЛІ праблоку знімання вибірки, вихід блоку оцінки прискоцює фільтр Калмана другого порядку, що формує і рення з'єднаний з другим входом фільтра Калмана видає через комутатор вектор оцінок параметрів третього порядку, виходом пристрою є вихід комулінійної траєкторії ЦІЛІ Х Ц І кореляційної матриці татора помилок вимірів 4>п Введені блоки дозволяють виявити маневр ЦІПри цьому використовуються співвідношення ЛІ й оцінити його інтенсивність за значеннями виЛІНІЙНОГО фільтра Калмана Наприклад, при ОЦІНЦІ бірки помилок супроводу Застосування непарамедальності на момент часу t n тричного виявлювача більш ефективно в умовах, ^ = ^ э + Ап(гп-^э), 0) коли закон розподілу помилок невідомий r По тій же вибірці робиться оцінка значення де n _ 'TIS _ *n . ВІДПОВІДНО обмірюванням, екприскорення, яке використовується для корекції страпольоване значення дальності і її оцінки, параметрів фільтра , при цьому значно зменшуАп - коефіцієнт згладжування, обумовлений ються динамічні помилки фільтрації, і підвищуєтьзначеннями помилок екстраполяції і помилок виміся СТІЙКІСТЬ супроводу ру параметра, На фіг 1 приведена структурна схема запрог п ~Ц\з - д п . неузгодженість між обмірювальпонованого пристрою ним і екстрапольованим значеннями (нев'язка) На фіг 2 приведені залежності розміру динаміПри відсутності маневру помилка оцінки парачної помилки Ап супроводу траєкторії маневруючої метра являє собою білий гаусовський шум із нуЦІЛІ без обліку прискорення на виході фільтра Кальовим середнім і дисперсією лмана другого порядку (крива 1), на виході фільтра Калмана третього порядку, з обліком прискоD n =H%- 3 1 H T +R, (2) рення, при затримці у виявленні маневру ЦІЛІ де Ч-'пэ - кореляційна матриця помилок екстра(крива 2), при неточності в ОЦІНЦІ інтенсивності поляції, маневру (крива 3) і при мінімальній затримці у виН - ЛІНІЙНИЙ оператор ВІДПОВІДНОСТІ оцінюваних явленні маневру й обліку прискорення ЦІЛІ (крива параметрів і вимірюємих координат, 4) R - кореляційна матриця помилок виміру Тут t m , to, tk - ВІДПОВІДНО час початку маневру, Маневр ЦІЛІ, виникаючий в момент часу t m виявлення маневру і кінця маневру ЦІЛІ обумовлює стрибок прискорення q, що приводить Графічні залежності показують, що своєчасне до появи складової помилки супроводу, середнє виявлення маневру ЦІЛІ І облік оцінки прискорення, значення якої буде змінюватися в часу реалізовані в запропонованому пристрої, зменшуM[Ax]=F(j,m)-q (3) ють значення динамічних помилок фільтрації і, тим де q - значення прискорення, самим, підвищують СТІЙКІСТЬ супроводу ЦІЛІ F(j,m) - перехідна матриця обурень системи Запропонований пристрій містить послідовно Задовільну апроксимацію величини F(j,m) моз'єднані блок фільтра Калмана другого порядку 1, жна одержати, якщо обмежитися складовою приблок фільтри Калмана третього порядку 2, комута 56074 скорення (4) де j , m - відповідають сучасного моменту часу t, і моменту початку маневру ЦІЛІЙ t m , Т - період відновлення інформації (період огляду РЛС) Тоді значення збуджуючого параметра у даному випадку - помилки екстраполяції параметра на j - кроку буде дорівнюватися = F(j,m) -q = - q ( j - m ) 2 T 2 , j>m (5) Квадратична форма помилки супроводу Q, підпорядкована нецентральному %2 розподілу з параметром не центральності [1] М [Дп] (6) Виявлення маневру ЦІЛІ робиться в блоці 4 по вибірці з j = 1, 2, М значень помилок супроводу Z, в "ковзному ВІКНІ" розміром М При виявленні маневру робиться переключення комутатора і на вихід, надходять оцінка параді 4і и п метрів ' >, формовані у фільтрі Калмана третього порядку При ОЦІНЦІ параметрів використовується значення прискорення, формовані в блоці 9 по вибірці Zj, по якій відбулося виявлення маневру Розглянемо більш докладно роботу блоку виявлення маневру 4 і блоку оцінки інтенсивності маневру 9 Виявлення маневру ЦІЛІ ЗДІЙСНЮЄТЬСЯ шляхом аналізу вибірки Zj, де j = 1,2, , М шляхом порівняння її з опорною вибіркою ZQ-m) Опорна вибірка ZQ-m) передує аналізованій вибірці Z, і попередньо записується в блок формування вибірок 5 Для виявлення маневру використовується непараметричний ранговий виявлювач, реалізований у блоці 4 У блоці 6 визначаються ранги значень аналізованої вибірки Z, в порівнянні зі значеннями помилок опорної вибірки ZQ-m) R-i, R2, ,R m Аналізована вибірка Z, також записується в регістр блока формування вибірок 5 Далі в блоці 7 обчислюється значення рангової статистики S Враховуючи характер зміни помилок супроводу при маневрі ЦІЛІ, коли спостерігається зсув (тренд) розміри нев'язки Д п , найбільше ефективна рангова кореляція [3] м S = ZJ-RJ J1 = (8) J=1 де розмір Рм має сенс енергії сигналу обурення Для одержання оцінки прискорення в блоці 12 накопичення помилок робиться обчислення розміру ZM, шляхом накопичення п о м и л о к ^ із вагами F(J) J=1 2 ah = Оцінка інтенсивності маневру q в блоці 9 здійснюється ВІДПОВІДНО до вираження, отриманим із співвідношень (4) і (5) (7) Значення S далі дорівнюється з пороговим рівнем Snop і при S > Snop приймається рішення про наявність маневру ЦІЛІ Розмір порога вибирається виходу з заданої імовірності помилкових тривог, на основі аналізу розподілу помилок (2) По імпульсу перевищення порога здійснюється переключення комутатора 3 а також керування блоком 10 знімання вибірки Z, по якій був виявлений маневр ЦІЛІ, і запис заданої вибірки в запам'ятовуючий пристрій, 11 В блоці 13 формується оцінка прискорення Ч шляхом нормування накопиченої суми ВІДПОВІДНО До (8) Отримане значення Ч , що характеризує інтенсивність маневру ЦІЛІ, надходить у блок фільтра Калмана третього порядку 2 і враховується при згладжуванні траєкторії маневруючої ЦІЛІ, ТИМ самим значно зменшуються динамічні помилки супроводу Оскільки маневр виявляється з деяким запізнюванням ti < t m 2 tivi, то у фільтрі Калмана третього порядку це враховується шляхом корекції екстрапольованих значень параметрів При технічній реалізації запропонованого пристрою можна використовувати наступні типові вузли і блоки У якості оптимальних згладжуючих фільтрів детермінованої траєкторії , і траєкторії ЦІЛІ на Д І ЛЯНЦІ маневру використовуються ВІДПОВІДНО фільтри Калмана другого і третього порядків (блоки 1 і 2), алгоритм роботи яких описаний в [1] Блок формування вибірок 5 складається з двох регістрів зсуву, що послідовно запам'ятовують дві сусідні вибірки помилок супроводу ZQ) і ZQМ) із «ковзного вікна» і можуть бути виконані на базі типових інтегральних мікросхем [4] Блоки обчислення рангу 6, обчислення рангової статистики 7 і граничний блок 8 можуть бути виконані як у схемі рангового виявлювача [3, мал 8 2] із використанням М схем порівняння, лічильника інверсій, запам'ятовуючого пристрою, множувача, накопичувального суматора і цифрового компаратора на базі типових інтегральних мікросхем [4] Блок знімання вибірки 10 являє собою набір із М схем збігу, через яки по імпульсу перевищення порога вибірки значень Zj, записуються в запам'ятовуючий пристрій 11 Запам'ятовуючий пристрій 1 1 , блок накопичення помилок 12 і оцінки прискорення 13 забезпечують виконання арифметичних операцій підсумовування, перемножування і розподілу і можуть бути виконані на інтегральних мікросхемах [4] Технічний результат, який може бути отриманий при здійсненні винаходу полягає в наступному Застосування при виявленні маневру ЦІЛІ непараметричного тесту рангової кореляції більш 8 56074 ефективно в порівнянні з параметричними методами при змінюючому або невідомому апріорному законі розподілу помилок, тому що забезпечує стабільну імовірність помилкових тривог [3] У той же час враховується характер зсуву параметра нецентральності ап(6), що підвищує імовірність виявлення маневру Зміна і облік інтенсивності маневру (приско 1 Кузьмин С 3 Основы проектирования систем цифровой обработки радиолокационной информации - М Радио и связь, 1986 -с 181 2 Гришин Ю П , Казаринов ЮМ Динамические системы, устойчивые к отказам - М Радио и связь, 1985 -с 163 3 Обнаружение радиосигналов / Под ред А А Колосова, - М Радио и связь, 1989 - с 165 4 Цифровые и аналоговые интегральные микросхемы Справочник / Под ред С В Якубовского - М Радио и связь, 1989 рення ЦІЛІ) ДОЗВОЛЯЮТЬ зменшити динамічні поми лки супроводу, що можна оцінити по співвідношенню (5) ДЖЕРЕЛА ІНФОРМАЦІЇ Блок оцінки інтенсивності маневру 10 Блок-схема виборки Запам'ятовуючий И Блок фільтра Каймана другого порядку Блок накопичення похибок і: Блок ощнки прискорення Блок фільтра Калмана хретього порядку Комутатор Блок виявлення маневру Б ток Z0-M) Блок формування обчислення аиборок рангу Блок обчислення рангової статистики 9' 4< ШрОГОВЇШ блок Фіг. 1 Фіг. 2 Підписано до друку 05 05 2003 р Тираж 39 прим ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)236-47-24
ДивитисяДодаткова інформація
Назва патенту англійськоюAdaptive device for tracking maneuvering targets
Автори англійськоюChelpanov Artem Volodymyrovych
Назва патенту російськоюАдаптивное устройство для сопровождения маневрирующих целей
Автори російськоюЧелпанов Артем Владимирович
МПК / Мітки
МПК: G01S 13/00, G01S 13/52
Мітки: пристрій, адаптивний, супроводу, цілей, маневруючих
Код посилання
<a href="https://ua.patents.su/4-56074-adaptivnijj-pristrijj-suprovodu-manevruyuchikh-cilejj.html" target="_blank" rel="follow" title="База патентів України">Адаптивний пристрій супроводу маневруючих цілей</a>
Адаптивний фільтр оцінки параметрів траєкторії цілі
Номер патенту: 48843
Опубліковано: 15.08.2002
Автори: Савченко Микола Павлович, Челпанов Артем Володимирович, Фик Олександр Ілліч, Карлов Володимир Дмитрович
МПК: G01S 13/52, G01S 13/00
Мітки: фільтр, цілі, траєкторії, адаптивний, оцінки, параметрів
Формула / Реферат:
Адаптивний фільтр оцінки параметрів траєкторії цілі, що містить блок обчислення кореляційної матриці помилок, послідовно з'єднані блок обчислення оцінок параметрів, пристрій що запам'ятовує та блок екстраполяції параметрів, який відрізняється тим, що додатково введено блок фазометра і вузол оцінки швидкості та прискорення у складі послідовно з'єднаних блоків генератора опорних функцій, блоку вирахування, корелятора і блоку формування оцінок,...
Спосіб ремонту станції супроводу цілей радіолокаційного комплексу

Номер патенту: 55008
Опубліковано: 17.03.2003
Автори: Немчин Олександр Федорович, Сіденко Олег Миколайович, Стеценко Олександр Олексійович, Захрабов Микола Нурушевич
МПК: G01S 7/00
Мітки: станції, супроводу, цілей, комплексу, радіолокаційного, спосіб, ремонту
Формула / Реферат:
1. Спосіб ремонту станції супроводу цілей радіолокаційного комплексу, при якому вводять транспортний засіб з розміщеними на ньому станціями в ремонтний комплекс, виявляють перевіркою роботи станції супроводу цілей у складі радіолокаційного комплексу несправні вузли і блоки, вилучають з відсіків і стелажів радіолокаційного комплексу несправні вузли і блоки, перевіряють вилучені вузли і блоки з використанням стендів машини технічного...
Адаптивний діагностичний процесор
Номер патенту: 53459
Опубліковано: 15.01.2003
Автори: Кулік Анатолій Степанович, Доценко Наталія Володимирівна, Дергачов Володимир Андрійович
МПК: G06F 15/177
Мітки: адаптивний, процесор, діагностичний
Формула / Реферат:
Адаптивний діагностичний процесор, що містить групу інформаційних входів, блок пам'яті, двійковий лічильник, схему порівняння, елемент І, генератор, керуючий вхід, вихідну шину, причому керуючий вхід з'єднаний з першим входом елемента І, вихід генератора з'єднаний з другим входом елемента І, вихід якого з'єднаний з рахунковим входом двійкового лічильника, виходи двійкового лічильника з'єднані з першою групою входів блока пам'яті, який...
Адаптивний цифровий фільтр
Номер патенту: 28990
Опубліковано: 16.10.2000
Автори: Іщенко Володимир Іванович, Зімчук Ігор Валерійович
МПК: G05B 17/00
Мітки: адаптивний, цифровий, фільтр
Формула / Реферат:
Адаптивний цифровий фільтр, що містить послідовно з'єднані блок порівняння, перший вхід котрого є входом пристрою, блок корекції, суматор, блок затримки, блок екстраполяції, вихід якого об'єднай з другим входом суматора, крім того уміщуючий блок зворотного зв'язку, підключеного входом до виходу блока екстраполяції, а виходом до другого входу блока порівняння, який відрізняється тим, що в нього введені перше та друге обчислювальні пристрої,...
Пристрій відображення орієнтованих за напрямком умовних позначок цілей, синтезованих з елементів розкладання малоформатного телевізійного растра
Номер патенту: 45923
Опубліковано: 15.04.2002
Автори: Говоров Валентін Сергійович, Пузанов Денис Михайлович
МПК: G09G 1/14
Мітки: орієнтованих, умовних, позначок, растра, відображення, розкладання, цілей, напрямком, малоформатного, елементів, синтезованих, телевізійного, пристрій
Формула / Реферат:
Пристрій відображення орієнтованих за напрямком умовних позначок цілей, синтезованих з елементів розкладання малоформатного телевізійного растра, що містить перший, другий і третій регістри, перший і другий перетворювачі код-напруга, перетворювач код-часовий інтервал, цифровий двійковий лічильник і тригер, який відрізняється тим, що він доповнений блоком кеш-пам'яті, блоком постійної пам'яті, цифровим двійковим лічильником з попереднім...
Попередній патент: Спосіб управління наземними антенними системами космічних радіоліній
Наступний патент: Пристрій для передачі і приймання інформації
Випадковий патент: Спосіб автоматичного керування процесом сушіння крупи